三维体凸包的计算公式
平面图形和立体图形的计算公式

平面图形和立体图形的计算公式1、正方形(C:周长S:面积a:边长)周长=边长×4 C=4a 面积=边长×边长 S=a×a=2a2、正方体(V:体积a:棱长)表面积=棱长×棱长×6 S表=a×a×6体积=棱长×棱长×棱长 V=a×a×a=3a3、长方形(C:周长S:面积a:边长)周长=(长+宽)×2 C=2(a+b)面积=长×宽 S=ab4、长方体(V:体积s:面积a:长b: 宽h:高)(1)表面积(长×宽+长×高+宽×高)×2 S=2(ab+ah+bh)(2)体积=长×宽×高 V=abh5、三角形(s:面积a:底h:高)面积=底×高÷2 s=ah÷2三角形高=面积×2÷底三角形底=面积×2÷高6、平行四边形(s:面积a:底h:高)面积=底×高 s=ah7、梯形(s:面积a:上底b:下底h:高)面积=(上底+下底)×高÷2 s=(a+b)× h÷28、圆形(S:面积C:周长лd=直径r=半径)(1)周长=直径×л=2×л×半径 C=лd=2лr(2)面积=半径×半径×л=π2r9、圆柱体(v:体积h:高s:底面积r:底面半径c:底面周长)(1)侧面积=底面周长×高=ch(2лr或лd) (2)表面积=侧面积+底面积×2 (3)体积=底面积×高 (4)体积=侧面积÷2×半径10、圆锥体(v:体积h:高s:底面积r:底面半径)体积=底面积×高÷3。
凸包面积和周长的计算

凸包面积和周长的计算凸包是在平面上给定的一组点中构成的最小凸多边形。
凸包的面积和周长是计算凸包重要的指标,可以用来分析数据分布的紧密程度和形状特征。
本文将介绍凸包的定义和生成算法,并详细说明如何计算凸包的面积和周长。
一、凸包的定义凸包是指在平面上给定的一组点中,由这些点构成的最小凸多边形。
凸多边形的特点是:任意两点之间的线段都在多边形内部。
凸包是凸多边形中的最小面积的凸多边形,即是在所有凸多边形中,面积最小的凸多边形。
二、凸包的生成算法1. Jarvis算法(也叫作包裹算法或者旋转卡壳算法):该算法基于以下思想:从一组点中找到一个起始点,将其作为凸包的一个顶点。
然后,从这个点开始,寻找下一个能保证凸包深度最大的点,并将其加入凸包。
不断重复这个过程,直到回到起始点为止。
该算法的时间复杂度为O(nh),其中n是点的个数,h是凸包的顶点数。
2.快速凸包算法:该算法基于Graham扫描算法改进而来。
首先选择一个y坐标最小的点,将其他点按照与这个点的连线的极角进行排序。
然后依次处理排序后的点,对每个点进行判断,如果点在逆时针方向上,则加入凸包,否则舍弃。
最后得到凸包。
该算法的时间复杂度为O(nlogn),是一种高效的凸包生成算法。
三、凸包面积的计算凸包的面积可以用以下公式进行计算:S = (x1y2 + x2y3 + ... + xn-1yn + xny1 - x2y1 - x3y2 - ... - xnyn-1 - x1yn) / 2其中,(x1, y1), (x2, y2), ..., (xn, yn)是凸包的顶点的坐标。
计算凸包的面积可以通过以上公式进行求解,公式中的坐标是有顺序的,要按照逆时针或者顺时针的方向依次输入。
四、凸包周长的计算凸包的周长可以通过计算凸包顶点之间的距离之和来得到。
对于凸包的n个顶点,可以依次计算相邻顶点之间的距离,并将其累加得到凸包的周长。
保证计算的正确性需要注意以下几点:1.凸包的顶点要按照逆时针或者顺时针的方向依次输入,以保证计算出的面积和周长的结果正确。
凸包——精选推荐
凸包算法模型想象在⼀个平⾯上钉下了n个钉⼦。
现在有⼀根橡⽪筋,我们把它撑开,期望在松⼿之后橡⽪筋可以收缩,包住所有的n个钉⼦。
事实上,这正是⼀个凸包。
如下图:引⼊凸包的概念:凸包,定义为周长最⼩的包含点集中所有点的凸多边形。
即使存在某个凹多边形的周长与凸包相等且可以包含所有点,这个凹多边形也⼀定不是凸包。
如下图,这个凹多边形不是该点集的凸包:凸包问题属于计算⼏何,通常可以使⽤Andrew,Graham,Jarvis,斜率逼近等算法求解。
本⽂将着重介绍其中思想通俗、代码简单的Andrew算法。
由于求解凸包需要⼀些前置的计算⼏何知识,本⽂将会介绍⼀些基础计算⼏何知识。
前置知识引进向量的概念。
在数学中,向量指同时具有⼤⼩和⽅向的量,与之相对的量称为数量。
数量只有⼤⼩,没有⽅向。
向量可以⽤⼀条带箭头的线段来形象地表⽰:箭头代表⽅向,线段的长度代表向量的⼤⼩。
如果向量的起点为A,终点为B,则这个向量可以记作→ab。
两个向量→x1,y1和→x2,y2的外积称之为叉积,它的结果是⼀个向量。
叉积的计算⽅法是 (x1y2)−(x2y1) ,记为→x1,y1×→x2,y2。
对于两个向量→ab,→bc,如果它们的叉积>0 ,说明→ab在→bc的顺时针⽅向;如果它们的叉积=0,说明→ab和→bc共线;如果它们的叉积<0,说明→ab在→bc的逆时针⽅向。
算法思想凸包Andrew算法的思想⾮常简单。
我们⾸先把点集按照以x坐标为第⼀关键字,以y坐标为第⼆关键字的⽅式进⾏双关键字从⼩到⼤排序,排序后的第⼀个点就是我们选出的极点。
两个关键字的顺序可以调换。
如下图,点 1 就是该点集的极点。
接着,我们从极点开始逆时针考虑将每⼀个点都加⼊凸包。
显然我们排序后的第⼀个点和最后⼀个点⼀定在凸包上。
从第⼆个点开始,我们假设当前点可以加⼊凸包。
设凸包上此时有m个点,第m−1 个点和第m个点分别是a,b,当前要加⼊凸包的点为c。
c++实现凸包算法

//poj3528,裸的三维凸包,可做三维凸包的模板判断点p是否能“看见”面abc的方法是:求(pa叉乘pb)点乘pc,如果这个结果大于0,则p能“看到”面abc。
(必须保证从凸包外看去,每个构成凸包的面上的点的顺序为右手系) 判断是否为临界棱的方法:从点p能“看见”与该棱相邻的一个面,而不能“看见”与它相邻的另一个面,则该棱为临界棱。
判断点p是否在凸包内部:若从p看不到任何凸包上的面,则p在凸包内部,忽略。
#include<iostream>using namespace std;#include<cmath>#include<cstring>#include<cstdio>#define N 505#define eps 0.000001struct Point{double x,y,z;Point(){}Point(double _x,double _y,double _z){x=_x;y=_y;z=_z;}Point operator-(Point t1)//向量减法{return Point(x-t1.x,y-t1.y,z-t1.z);}Point operator*(Point t2)//叉积{return Point(y*t2.z-t2.y*z,z*t2.x-x*t2.z,x*t2.y-y*t2.x);}double operator^(Point t3)//点积{return x*t3.x+y*t3.y+z*t3.z;}};struct Plane{int a,b,c;//a,b,c为三个点的编号,a,b,c要满足从凸包外面看成右手系bool in;//表示该平面是否在凸包内};void Swap(Point &a,Point &b){Point c;c=a;a=b;b=c;}Point point[N];Plane plane[N*10];int edge[N][N];int plen;//计算过的面的个数void dfs(int p,int t);double vol(Point p,Plane f)//p与平面abc组成的四面体的有向体积的倍{Point a=point[f.a]-p,b=point[f.b]-p,c=point[f.c]-p;return (a*b)^c;}double vlen(Point a)//求向量a的模{return sqrt(a.x*a.x+a.y*a.y+a.z*a.z);}void deal(int p,int t1,int t2){int t=edge[t1][t2];//搜索与该边相邻的另外一个平面if(plane[t].in){if(vol(point[p],plane[t])>eps)dfs(p,t);else{Plane add;add.a=t2,add.b=t1,add.c=p,add.in=true;//这里注意顺序,就可以不用Swap了,add.a,add.b,add.c要成右手系edge[add.a][add.b]=edge[add.b][add.c]=edge[add.c][add.a]=plen;plane[plen++]=add;}}}void dfs(int p,int t)//递归搜索所有应该从凸包内删除的面{plane[t].in=false;deal(p,plane[t].b,plane[t].a);//注意,a和b的顺序刚好跟下面的相反,为的就是搜索与边(point[plane[t].a],point[plane[t].b])相邻的另外一个平面deal(p,plane[t].c,plane[t].b);deal(p,plane[t].a,plane[t].c);}int del(int n)//增量法,有n个点,返回计算过的平面个数,若无法构成凸包,则返回-1 {if(n<4)//如果点数小于,则无法构成凸包,若已保证点数大于或等于,可略去return -1;/******************这一段用来保证前四点不共面,若已保证,可略去bool allTheSamePoint=true;for(int i=1;i<n;i++)//保证前两点不共点{if(vlen(point[i]-point[0])>eps){Swap(point[1],point[i]);allTheSamePoint=false;break;}}if(allTheSamePoint)return -1;bool allTheSameLine=true;for(int i=2;i<n;i++)//保证前三点不共线{if(vlen((point[1]-point[0])*(point[i]-point[1]))>eps){Swap(point[2],point[i]);allTheSameLine=false;break;}}if(allTheSameLine)return -1;bool allTheSamePlane=true;for(int i=3;i<n;i++)//保证前四点不共面{if(fabs((point[1]-point[0])*(point[2]-point[0])^(point[i]-point[0]))>eps){Swap(point[3],point[i]);allTheSamePlane=false;break;}}if(allTheSamePlane)return -1;这一段用来保证前四点不共面,若已保证,可略去************/plen=0;//计算过的面的个数Plane add;for(int i=0;i<4;i++){add.a=(i+1)%4,add.b=(i+2)%4,add.c=(i+3)%4,add.in=true;if(vol(point[i],add)>0)swap(add.a,add.b);edge[add.a][add.b]=edge[add.b][add.c]=edge[add.c][add.a]=plen;//记录与该边相邻的其中一个面,并且该顺序在该面内(从凸包外看)成右手系,因此,该面是唯一的plane[plen++]=add;}for(int i=4;i<n;i++){for(int j=0;j<plen;j++){if(plane[j].in && vol(point[i],plane[j])>eps){dfs(i,j);break;}}}return plen;}double area(Plane a){return vlen((point[a.b]-point[a.a])*(point[a.c]-point[a.a]))/2.0;}int main(){int n;cin>>n;for(int i=0;i<n;i++)cin>>point[i].x>>point[i].y>>point[i].z;int len=del(n);if(len==-1)printf("0.000\n");else{double ans=0.0;for(int i=0;i<len;i++){if(plane[i].in){ans+=area(plane[i]);}}printf("%.3lf\n",ans);}return 0;}。
瘤体体积计算公式

瘤体体积计算公式
瘤体是指人体或动植物体内异常增生的肿块,其体积计算公式可以根
据不同形状的瘤体采用相应的公式进行计算。
以下是几种常见的瘤体形状
及其相应的体积计算公式:
1.球形瘤体:
球形瘤体是最基本的几何体,其体积计算公式为:
V=(4/3)πr³
其中,V表示瘤体的体积,π取近似值3.14,r表示瘤体的半径。
2.圆柱形瘤体:
圆柱形瘤体的体积计算公式为:
V=πr²h
其中,V表示瘤体的体积,π取近似值3.14,r表示瘤体底面的半径,h表示瘤体的高度。
3.球冠形瘤体:
球冠形瘤体可以看作是一个球截去一部分,其体积计算公式为:
V=(1/3)πh(3r²+h²)
其中,V表示瘤体的体积,π取近似值3.14,r表示球冠底面的半径,h表示瘤体的高度。
4.椭球形瘤体:
椭球形瘤体的体积计算公式为:
V = (4/3)πabc
其中,V表示瘤体的体积,π取近似值3.14,a、b、c分别表示椭球
体的三个轴长。
5.锥形瘤体:
锥形瘤体的体积计算公式为:
V=(1/3)πr²h
其中,V表示瘤体的体积,π取近似值3.14,r表示瘤体底面的半径,h表示瘤体的高度。
以上是几种常见的瘤体形状及其体积计算公式,通过根据具体瘤体的
形状和尺寸,选择相应的公式进行计算即可得到瘤体的体积。
需要注意的是,这些公式只适用于理想的几何体瘤体,对于不规则形状的瘤体,需要
采用其他方法如三维扫描等进行测量和计算。
同时,在实际应用中,还需
要调整计算精度和单位制以满足具体需求。
凸包算法详解
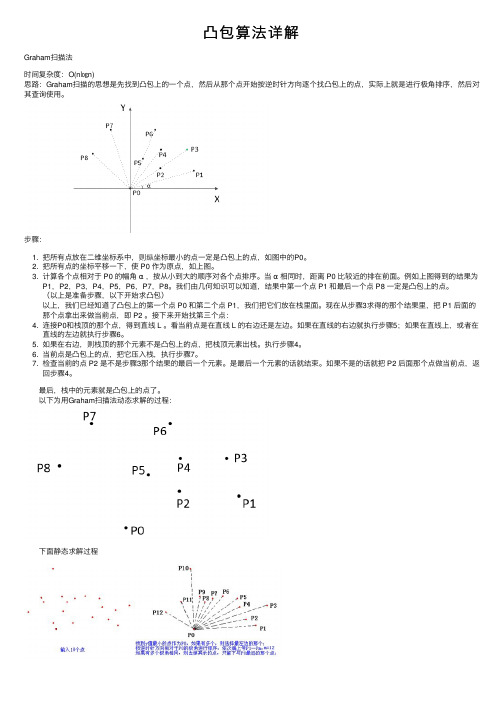
凸包算法详解Graham扫描法时间复杂度:O(n㏒n)思路:Graham扫描的思想是先找到凸包上的⼀个点,然后从那个点开始按逆时针⽅向逐个找凸包上的点,实际上就是进⾏极⾓排序,然后对其查询使⽤。
步骤:1. 把所有点放在⼆维坐标系中,则纵坐标最⼩的点⼀定是凸包上的点,如图中的P0。
2. 把所有点的坐标平移⼀下,使 P0 作为原点,如上图。
3. 计算各个点相对于 P0 的幅⾓α,按从⼩到⼤的顺序对各个点排序。
当α相同时,距离 P0 ⽐较近的排在前⾯。
例如上图得到的结果为P1,P2,P3,P4,P5,P6,P7,P8。
我们由⼏何知识可以知道,结果中第⼀个点 P1 和最后⼀个点 P8 ⼀定是凸包上的点。
(以上是准备步骤,以下开始求凸包)以上,我们已经知道了凸包上的第⼀个点 P0 和第⼆个点 P1,我们把它们放在栈⾥⾯。
现在从步骤3求得的那个结果⾥,把 P1 后⾯的那个点拿出来做当前点,即 P2 。
接下来开始找第三个点:4. 连接P0和栈顶的那个点,得到直线 L 。
看当前点是在直线 L 的右边还是左边。
如果在直线的右边就执⾏步骤5;如果在直线上,或者在直线的左边就执⾏步骤6。
5. 如果在右边,则栈顶的那个元素不是凸包上的点,把栈顶元素出栈。
执⾏步骤4。
6. 当前点是凸包上的点,把它压⼊栈,执⾏步骤7。
7. 检查当前的点 P2 是不是步骤3那个结果的最后⼀个元素。
是最后⼀个元素的话就结束。
如果不是的话就把 P2 后⾯那个点做当前点,返回步骤4。
最后,栈中的元素就是凸包上的点了。
以下为⽤Graham扫描法动态求解的过程: 下⾯静态求解过程1 #include<iostream>2 #include<string.h>3 #include<algorithm>4 #include<cstdio>5 #include<cmath>6using namespace std;7const int maxn=105;8const double PI=acos(-1.0);9struct node{int x,y;};10 node vex[maxn];//存⼊所有坐标点11 node stackk[maxn];//凸包中所有的点12bool cmp1(node a,node b){//按点的坐标排序13if(a.y==b.y)return a.x<b.x;//如果纵坐标相同,则按横坐标升序排14else return a.y<b.y;//否则按纵坐标升序排15 }16bool cmp2(node a,node b){//以基点为坐标原点,极⾓按升序排,这⾥可⽤atan2函数或者叉积来进⾏极⾓排序,但是⽤atan2函数来排序效率⾼时间快,不过精度⽐叉积低17double A=atan2(a.y-stackk[0].y,a.x-stackk[0].x);//返回的是原点⾄点(x,y)的⽅位⾓,即与x轴的夹⾓18double B=atan2(b.y-stackk[0].y,b.x-stackk[0].x);19if(A!=B)return A<B;//逆时针⽅向为正值,极⾓⼩的排在前⾯20else return a.x<b.x;//如果极⾓相同,则横坐标在前⾯的靠前排列21 }22int cross(node p0,node p1,node p2){//计算两个向量a、b(a=(x1,y1),b=(x2,y2))的叉积公式:a×b=x1y2-x2y1 ===> p0p1=(x1-x0,y1-y0),p0p2=(x2-x0,y2-y0)23return (p1.x-p0.x)*(p2.y-p0.y)-(p2.x-p0.x)*(p1.y-p0.y);24 }25double dis(node a,node b){//计算两点之间的距离26return sqrt((a.x-b.x)*(a.x-b.x)*1.0+(a.y-b.y)*(a.y-b.y));27 }28int main(){29int t;30while(~scanf("%d",&t)&&t){31for(int i=0;i<t;++i)//输⼊t个点32 scanf("%d%d",&vex[i].x,&vex[i].y);33if(t==1)printf("%.2f\n",0.00);//如果只有⼀个点,则周长为0.0034else if(t==2)printf("%.2f\n",dis(vex[0],vex[1]));//如果只有两个点,则周长为两个点的距离35else{36 memset(stackk,0,sizeof(stackk));//清037 sort(vex,vex+t,cmp1);//先按坐标点的位置进⾏排序38 stackk[0]=vex[0];//取出基点39 sort(vex+1,vex+t,cmp2);//将剩下的坐标点按极⾓进⾏排序,以基点为坐标原点40 stackk[1]=vex[1];//将凸包中的第⼆个点存⼊凸集中41int top=1;//当前凸包中拥有点的个数为top+142for(int i=2;i<t;++i){//不断地找外围的坐标点43while(top>0&&cross(stackk[top-1],stackk[top],vex[i])<=0)top--;//如果叉积为负数或0(0表⽰两向量共线),则弹出栈顶元素44//虽然第2个凸点显然是最外围的⼀点,但加上top>0保证了栈中⾄少有2个凸点45 stackk[++top]=vex[i];46 }47double s=0;48for(int i=1;i<=top;++i)//计算凸包的周长49 s+=dis(stackk[i-1],stackk[i]);50 s+=dis(stackk[top],vex[0]);//最后⼀个点和第⼀个点之间的距离51 printf("%.2f\n",s);52/*53 int s=0;//计算凸包的⾯积54 for(int i=1;i<=top;i++)55 s+=cross(st[i-1],st[i],e[0])/2;56*/57 }58 }59return0;60 }。
凸包 扩展系数-概述说明以及解释

凸包扩展系数-概述说明以及解释1.引言1.1 概述概述:凸包是计算几何学中的重要概念,它是一个包含给定点集中所有点的最小凸多边形。
凸包的计算方法和算法在计算机图形学、模式识别、地理信息系统等领域有着广泛的应用。
在实际应用中,为了更好地描述点集之间的几何关系,人们引入了凸包扩展系数这一概念。
凸包扩展系数可以帮助我们衡量凸包在空间中的扩展程度,进一步优化算法和提高计算效率。
本文将系统地介绍凸包的定义、计算方法和算法,以及凸包扩展系数的定义和计算方法,旨在深入探讨凸包在实际应用中的意义和作用。
1.2 文章结构本文将分为三个部分:引言、正文和结论。
在引言部分,将首先对凸包进行简要概述,介绍凸包的基本概念,并说明本文的目的。
引言部分将帮助读者了解本文所要讨论的主题,并对文章的重点和方向有一个初步的了解。
在正文部分,将详细介绍凸包的定义和基本概念,以及凸包的计算方法和算法。
通过对凸包的详细讨论,读者可以深入了解凸包的特性和计算过程,从而更好地理解凸包扩展系数的定义和计算方法。
在结论部分,将总结本文的内容,讨论凸包在不同领域的应用和意义,并介绍凸包扩展系数的定义和计算方法。
结论部分将对本文所讨论的内容进行一个简要的总结,同时展望凸包在未来的研究和应用方向。
1.3 目的:本文的目的在于探讨和分析凸包扩展系数在计算机图形学和几何学中的重要性和应用。
通过详细介绍凸包的定义、基本概念和计算方法,引出了凸包扩展系数的概念。
在这一部分,我们将重点讨论凸包扩展系数的定义和计算方法,以及其在实际应用中的意义和作用。
同时,我们也将探讨如何利用凸包扩展系数来优化算法和提高计算效率。
通过深入研究凸包扩展系数的相关理论和实践,希望能够为读者提供全面的了解和思考,推动相关领域的研究和发展。
2.正文2.1 凸包的定义和基本概念凸包是指包围一组点集的最小凸多边形。
其中,凸多边形意味着多边形内部的所有角度都小于180度。
凸包在计算机图形学、几何学、地理信息系统等领域都有广泛的应用。
快速凸包算法

2.5 Graham算法
• 以极端点 pi为初始点, • 依次对相邻三个点pi ,pi+1和pi+2 ,计算pi pi+1×pi+1pi+2
– 如果在z 轴上的投影大于零,即(pi pi+1×pi+1pi+2)z>0
• 说明在pi+1 处左转弯,多边形在该点上外凸,暂时保留这三点 • 前进一步,同样去判断相邻三个点pi+1,pi+2和 pi+3
– 二面角是指空间中两个相邻接的面在它们的公共边上的内夹角
• 对于任意的多胞形,顶点处的所有多边形内角之和小于2π
– 这是每个顶点处是凸的必要条件,但不是充分条件
3.1 多面体
• 3.1.2 正则多面体
– 只存在五种不同的正多面体
• 正四面体、正六体、正八面体、正十二面体和正二十面体 • 也叫柏拉图体(Platonic solids),因为柏拉图在他的《蒂迈 欧篇 (Timaeus) 》中讨论过它们
3.1 多面体
• 如果把多面体看成厚度为零的多边形围成的空间, 第二个条件也可写为
– 多面体表面上任一点,它在表面上的邻域同胚于一个 开圆盘,开圆盘是二维的开圆 – 如果一个表面上的每一个点都满足这个条件,那么这 个表面就被称为二维流形(2D manifold)
3.1 多面体
• 第3个条件表示顶点和边组成的图是连通的
– 如果(pi pi+1×pi+1pi+2)z ≤0
• 说明在pi+1处右转弯,多边形在该点上内凹,把pi+1点从多边形边界中删除 • 后退一步,同样去判断相邻三个点pi-1,pi和 pi+2
• 时间复杂度为线性O(n)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三维体凸包的计算公式
三维体凸包的计算是一个复杂的几何问题,涉及到凸包、几何计算和算法等领域。
凸包是几何图形中一个重要的概念,它描述的是一个点集中的所有点构成的凸多边形。
三维体凸包的计算通常需要使用到计算机图形学和计算几何的方法。
下面提供一种常见的计算三维体凸包的方法:
1. 顶点选择: 首先,需要确定一个合适的顶点集合来表示三维体。
这个集合
可以是三维体的所有顶点,也可以是其中的一部分顶点。
2. 凸包计算: 对于给定的顶点集合,可以采用扫描算法或者分治算法来计算
凸包。
扫描算法通常采用旋转轴法,将三维体沿着不同的轴旋转,并记录下旋转过程中的极角和极径,最后根据这些信息确定凸包的顶点。
分治算法则将三维体分成不同的子集,分别计算子集的凸包,然后合并得到整体的凸包。
3. 优化: 为了提高计算效率,可以采用一些优化方法,例如使用八叉树等数
据结构来加速近邻点的查找,或者采用空间分割法将三维体分成更小的子集,分别计算后再合并。
需要注意的是,具体的实现方法可能会因为不同的应用场景和需求而有所不同。
此外,三维体凸包的计算是一个NP难问题,当点集数量较大时,计算
时间可能会较长。
因此,在实际应用中,需要综合考虑算法的复杂度、计算精度和实时性等方面的要求。