基于机器视觉的番茄目标提取答辩PPT
基于图像处理技术的番茄成熟度检测研究

第4期(总第376期)2021年4月No.4 APR文章编号:1673-887X(2021)04-0050-03基于图像处理技术的番茄成熟度检测研究伍蓥芮,张志勇,韩小平,杨威,杨原青(山西农业大学农业工程学院,山西太谷030801)摘要提出了一种利用图像处理技术判别番茄成熟度的方法。
将实验温室大棚采集的番茄果实图像转化为RGB颜色模型,人工划分阈值并提取果实坐标,以原图像素与人工分量阈值的方差为依据,判别番茄成熟过程的4个时期,为研制番茄成熟度判别设备提供了参考。
关键词图像处理技术;番茄;成熟度中图分类号S371文献标志码A doi:10.3969/j.issn.1673-887X.2021.04.022Research on Tomato Maturity Detection Based on Image Processing TechnologyWu Yingrui,Zhang Zhiyong,Han Xiaoping,Yang Wei,Yang Yuanqing(College of Agricultural Engineering,Shanxi Agricultural University,Taigu030801,Shanxi,China)Abstract:A method for judging tomato maturity using image processing technology is proposed.The tomato fruit images collected in the experimental greenhouse were converted into RGB color models,and the thresholds were manually divided and the fruit coor‐dinates were extracted.Based on the variance of the original image pixels and the artificial component thresholds,the four stages of the tomato ripening process were distinguished for the purpose of developing tomato maturity.The discrimination equipment pro‐vides a reference.Key words:image processing technology,tomato,maturity番茄果实营养价值较高,含丰富的维生素和矿物质。
番茄分拣机开题报告
番茄分拣机开题报告一、引言随着社会发展和科技进步,人们对于高效率、智能化生产的需求越来越强烈。
农业领域也在不断寻求新的技术手段来提升农作物的生产效率和质量。
本开题报告介绍了一个番茄分拣机的开发项目,旨在通过机器视觉和自动化技术,实现对番茄的分拣和分类,提高番茄产量和质量。
二、项目背景番茄是世界上广泛种植的蔬菜之一,市场需求量大且稳定。
然而,由于番茄的形状、大小和质量差异较大,传统的人工分拣方式效率低下且容易出错。
因此,开发一种能够快速、准确分拣番茄的机器已经成为了迫切需求。
三、项目目标本项目的目标是开发一种番茄分拣机,通过机器视觉技术对番茄进行检测和分类,实现自动化分拣。
具体目标包括:1.实现番茄的外观检测,包括形状、颜色、大小等特征的识别。
2.根据外观特征,将番茄分为合格品和次品两类。
3.实现自动分拣,将合格品和次品分别放入不同的容器中。
四、技术方案1. 硬件设备为了实现目标,本项目需要以下硬件设备:•彩色摄像头:用于采集番茄的图像。
•传送带系统:用于将番茄从一个位置运送到另一个位置。
•机械臂:用于将分拣好的番茄放入相应容器。
2. 软件系统本项目的软件系统主要基于机器视觉技术,包括以下功能:•图像采集:使用彩色摄像头采集番茄的图像。
•图像处理:对采集到的图像进行预处理,去除噪声并增强图像特征。
•特征提取:提取番茄的外观特征,如形状、颜色、大小等。
•分类算法:基于提取到的特征,使用机器学习算法对番茄进行分类。
•控制系统:根据分类的结果,控制传送带和机械臂进行自动化分拣。
五、实验计划本项目的实验计划如下:1.数据采集:收集番茄的图像数据集,并手动标注每个样本的合格品或次品标签。
2.数据预处理:对采集到的图像进行预处理,包括降噪和图像增强。
3.特征提取:使用计算机视觉算法提取番茄的外观特征。
4.分类算法开发:使用机器学习算法训练分类模型,实现合格品和次品的识别和分类。
5.系统集成:将图像处理和分类算法集成到整个番茄分拣系统中。
采摘机器人机械臂运动控制与目标抓取研究——基于嵌入式和机器视觉技术
采摘机器人机械臂运动控制与目标抓取研究——基于嵌入式
和机器视觉技术
刘力维
【期刊名称】《农机化研究》
【年(卷),期】2024(46)4
【摘要】首先,从整体方案、视觉定位系统和运动控制系统完成了对采摘机器人机械臂控制系统的设计;然后,基于图像处理技术设计了目标物体识别与抓取策略;最后,基于RRT算法研究了对采摘机器臂运动轨迹的控制方法,实现了对采摘机器人机械臂运动控制与目标抓取系统。
采摘试验结果表明:系统对苹果的识别和定位准确度比较高,采摘成功率达到了100%,对采摘机器人自主采摘的实现具有一定的现实意义。
【总页数】5页(P68-72)
【作者】刘力维
【作者单位】北京信息职业技术学院
【正文语种】中文
【中图分类】S225;TP241
【相关文献】
1.番茄采摘机器人目标检测与抓取的关键技术研究
2.基于嵌入式机器视觉的机器人抓取系统
3.基于机器视觉的机械臂目标稳准抓取研究
4.基于机器视觉的多机械臂
菠萝采摘机器人设计与试验5.采摘机器人目标识别技术研究——基于机器视觉及深度学习
因版权原因,仅展示原文概要,查看原文内容请购买。
计算机视觉技术在番茄收获中的应用
5 结果与讨论
该定位系统在 V C + + 610 平台上开发, 采用 I BM 公司的 C it PC 摄像机, 使用 U SB 连接, 焦距 为 418 mm , 视场角为±35° , 实验数据如图 2 所示。 图中理论值与修正值相差 35 mm , 即相差坐标系原 点至摄像机镜头前缘的距离。 图 3 中, 相对误差= ( 修正值- 实际值) 实际值×100% 。
3 目标的面积匹配
基于面积的匹配方法是把一幅图像中的某一点 的灰度邻域作为模板, 在另一幅图像中搜索具有相 同 ( 或相似) 灰度值分布的对应点邻域, 从而实现两 幅图像的配准[ 5 ]。 面积匹配方法优点是算法简单, 程 序容易实现; 缺点是运算量大, 容易出现误匹配。 应 用平行约束条件, 则可显著减少匹配时间, 同时也可 减少误匹配出现的概率。 311 误差匹配的设计 误差匹配的目的是降低误匹配出现的概率和缩 短面积匹配的时间。 为了实现误差匹配, 作如下约 束: 对于同一坐标系 ( 世界坐标系) 下的某物体, 如果 两摄像头处于与水平线平行的位置上, 则此物体在 左右两幅图像中具有相同的纵坐标, 称之为平行约 束。 按照平行约束, 目标上的某点在左右两幅图像 中的纵坐标应该相同, 然而由于目标分割时, 根据二 维直方图拟合的直线方程因两幅图像灰度值的差异 而略有不同, 即左右两幅图像的纵坐标存在偏差。 但 该偏差要远远小于图像的宽度, 所以通过设置适当 的偏差带可大大降低计算量, 减少匹配时间。 误差匹配的设计是为了减少计算量, 但偏差带 太宽则起不到减少计算量的目的, 偏差带太窄则可 能出现误匹配, 因为在同一偏差带上总能找到相似 度最大的配准区域。 另一方面采用误差匹配可以减 少面积匹配中的误配准。 自然生长的农作物, 很难保
基于视觉的西红柿分级方法研究
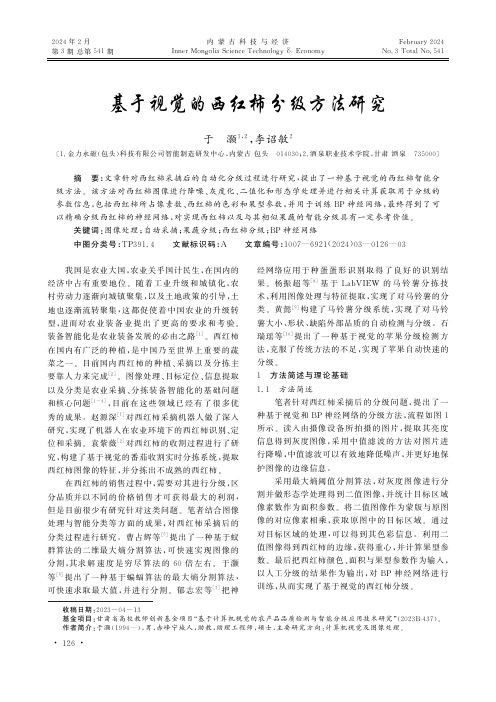
收稿日期:2023-04-13基金项目:甘肃省高校教师创新基金项目 基于计算机视觉的农产品品质检测与智能分级应用技术研究 (2023B -437)㊂作者简介:于灏(1994 ),男,赤峰宁城人,助教,助理工程师,硕士,主要研究方向:计算机视觉及图像处理㊂基于视觉的西红柿分级方法研究于 灏1,2,李诏敏21.金力永磁(包头)科技有限公司智能制造研发中心,内蒙古包头 014030;2.酒泉职业技术学院,甘肃酒泉 735000摘 要:文章针对西红柿采摘后的自动化分级过程进行研究,提出了一种基于视觉的西红柿智能分级方法㊂该方法对西红柿图像进行降噪㊁灰度化㊁二值化和形态学处理并进行相关计算获取用于分级的参数信息,包括西红柿所占像素数㊁西红柿的色彩和果型参数,并用于训练B P 神经网络,最终得到了可以精确分级西红柿的神经网络,对实现西红柿以及与其相似果蔬的智能分级具有一定参考价值㊂关键词:图像处理;自动采摘;果蔬分级;西红柿分级;B P 神经网络中图分类号:T P 391.4 文献标识码:A 文章编号:1007 6921(2024)03 0126 03 我国是农业大国,农业关乎国计民生,在国内的经济中占有重要地位㊂随着工业升级和城镇化,农村劳动力逐渐向城镇聚集,以及土地政策的引导,土地也逐渐流转聚集,这都促使着中国农业的升级转型,进而对农业装备业提出了更高的要求和考验㊂装备智能化是农业装备发展的必由之路[1]㊂西红柿在国内有广泛的种植,是中国乃至世界上重要的蔬菜之一㊂目前国内西红柿的种植㊁采摘以及分拣主要靠人力来完成[2]㊂图像处理㊁目标定位㊁信息提取以及分类是农业采摘㊁分拣装备智能化的基础问题和核心问题[1-4],目前在这些领域已经有了很多优秀的成果㊂赵源深[1]对西红柿采摘机器人做了深入研究,实现了机器人在农业环境下的西红柿识别㊁定位和采摘㊂袁紫薇[2]对西红柿的收割过程进行了研究,构建了基于视觉的番茄收割实时分拣系统,提取西红柿图像的特征,并分拣出不成熟的西红柿㊂在西红柿的销售过程中,需要对其进行分级,区分品质并以不同的价格销售才可获得最大的利润,但是目前很少有研究针对这类问题㊂笔者结合图像处理与智能分类等方面的成果,对西红柿采摘后的分类过程进行研究㊂曹占辉等[5]提出了一种基于蚁群算法的二维最大熵分割算法,可快速实现图像的分割,其求解速度是穷尽算法的60倍左右㊂于灏等[6]提出了一种基于蝙蝠算法的最大熵分割算法,可快速求取最大值,并进行分割㊂郁志宏等[7]把神经网络应用于种蛋蛋形识别取得了良好的识别结果㊂杨振超等[8]基于L a b V I EW 的马铃薯分拣技术,利用图像处理与特征提取,实现了对马铃薯的分类㊂黄懿[9]构建了马铃薯分级系统,实现了对马铃薯大小㊁形状㊁缺陷外部品质的自动检测与分级㊂石瑞瑶等[10]提出了一种基于视觉的苹果分级检测方法,克服了传统方法的不足,实现了苹果自动快速的分级㊂1 方法简述与理论基础1.1 方法简述笔者针对西红柿采摘后的分级问题,提出了一种基于视觉和B P 神经网络的分级方法,流程如图1所示㊂读入由摄像设备所拍摄的图片,提取其亮度信息得到灰度图像,采用中值滤波的方法对图片进行降噪,中值滤波可以有效地降低噪声,并更好地保护图像的边缘信息㊂采用最大熵阈值分割算法,对灰度图像进行分割并做形态学处理得到二值图像,并统计目标区域像素数作为面积参数㊂将二值图像作为蒙版与原图像的对应像素相乘,获取原图中的目标区域㊂通过对目标区域的处理,可以得到其色彩信息㊂利用二值图像得到西红柿的边缘,获得重心,并计算果型参数㊂最后把西红柿颜色㊁面积与果型参数作为输入,以人工分级的结果作为输出,对B P 神经网络进行训练,从而实现了基于视觉的西红柿分级㊂㊃621㊃2024年2月内蒙古科技与经济F e b r u a r y 20243541I n n e r M o n g o l i a S c i e n c e T e c h n o l o g y &E c o n o m yN o .3T o t a l N o .541图1基于视觉和B P神经网络的分级方法流程1.2二值图获取对读取的图像提取亮度信息进行灰度化处理㊂然后对灰度图像进行中值滤波㊂与均值滤波相比较,中值滤波能更好地保护边缘信息㊂中值滤波属于非线性平滑滤波,对于脉冲噪声有较好的抑制作用㊂其原理是建立模板,提取像素周围领域的灰度值进行排序,并将中值赋给这一像素,遍历整个图像后就完成了滤波㊂以图像取得最大熵值时的像素作为分割阈值可以获得较好的分割效果[6]㊂假设图像灰度的分布范围是{0,1, ,L-1},若灰度值小于t的像素区域构成目标区域,大于t的构成背景区域,那么各个灰度级在本区域的分布概率分别为:p i/p t,i=1,2, ;p i/(1-p t),i=t+1,t+2, ,L-1目标区域的熵为:H O(t)=-ði(p i/p t)l g(p i/p t),i=1,2, ,t(1)背景区域的熵为:H B(t)=-ði[p i/(1-p t)]l g[p i/(1-p t)],i=t+1,t+2, ,L-1(2)熵函数的定义为:H(t)=H O(t)+H B(t)=l n p t(1-p t)+H t/P t+(H r-H t)/(1-p t)(3)其中:H r=ðL-1i=1P i l n p iH t=ðt i=0p i l n p i二值化处理后还会存在一些小面积的噪声点,选取合适参数进行形态学运算可以得到较为理想的二值分割结果㊂1.3获取面积参数二值化后的图像目标区域为黑色灰度值为1,背景为白色灰度值为0,为了方便后续计算,对其进行取反,使目标区域为白色,背景为黑色㊂读取每个像素的灰度值,如果值为1,则计数器加1㊂遍历完整个图像后的返回值即为图像中目标区域的像素数量㊂1.4获取色彩参数将二值图像作为蒙版与原图像的对应像素相乘,获取原图中的目标区域,然后对目标区域的颜色求平均可以得到其色彩参数㊂1.5获取果型参数通过对二值图像进行边缘检测可以得到目标区域的轮廓线,据此计算轮廓的重心,以重心为参考点分别计算目标区域的纵向直径与横向直径,并把横纵直径的比值作为果型参数[10]㊂重心坐标为(x0,y0),过重心做横向直径与轮廓交于(x1,y0)和(x2,y0)两点,做纵向直径与轮廓交于(x0,y1)和(x0,y2)两点,则果型参数G可由下式求得㊂G=y2-y1x2-x1(4) 1.6创建B P神经网络反向传播神经网络(b a c k p r o p a g a t i o n,B P)是一种按照误差逆向传播算法训练的多层前馈神经网络,目前应用较为广泛[11]㊂本文中神经网络的输入为:面积参数㊁红色分量均值㊁绿色颜色分量㊁蓝色颜色分量㊁果型参数,输出为分级参数㊂2实验及结果分析所做实验采用的是W i n d o w s系统,处理器为11t h G e n I n t e l(R)C o r e(T M)i5-11300H@3.10 G H z,内存(R AM)为16.00G B,系统类型为64位,所用软件为MA T L A B2014a㊂西红柿的原始图像如图2所示,对其灰度化处理,图像在灰度为195时取得最大熵,以此分割图像㊂对目标区域的颜色求平均可以得到其颜色参数,结果如表1所示㊂对图像进行边缘检测,可以获㊃721㊃于灏,等㊃基于视觉的西红柿分级方法研究2024年第3期得图像轮廓,然后标记其重心,如图3所示,计算得到其横径与纵径的比值为1.04㊂图2西红柿原始图像图3重心标记表1目标区域颜色分量颜色分量数值R107G44B36通过人工分拣西红柿,取不合格品20个,良好品20个,优质品20个,依据上文方法测得其各个参数作为B P神经网络的输入㊂其中不合格品标记为0,良好品标记为1,优质品标记为2,作为B P神经网络的输出㊂取60组数据的50组作为训练集,取20组作为测试集㊂图4为B P神经网络训练的均方误差图,在第14次迭代时获得最优结果,均方误差为8.4569e-6㊂图4均方误差图3结束语对采摘后的西红柿进行分级,按照不同的品质以不同的价格出售,可使菜农获得最大利润㊂目前自动分级的技术和设备还没有普及,主要依靠人工来完成分拣㊂并且针对分拣过程的相关研究还少有人做㊂笔者通过对西红柿图像的处理得到了西红柿分级的参数,包括西红柿所占像素数㊁西红柿的颜色以及果型参数,成功地训练了B P神经网络,实现了基于视觉的西红柿智能分级,为西红柿及相似果蔬的自动化分级处理提供参考,并对实现农业智能化和农业装备的升级提供借鉴㊂[参考文献][1]赵源深.西红柿采摘机器人目标识别,定位与控制技术研究[D].上海:上海交通大学,2018.[2]袁紫薇.基于机器视觉的番茄收割机实时分拣系统研究[D].西安:长安大学,2017. [3]罗陆锋,邹湘军,杨洲,等.基于改进人工蜂群模糊聚类的葡萄图像快速分割方法[J].农业机械学报,2015,46(3):23-28. [4]蔡雯.基于机器视觉的自动收割机控制系统分析与研究[J].农机化研究,2018,40(11):199-202,207.[5]曹占辉,李言俊,张科.基于蚁群算法的二维最大熵分割算法[J].光子学报,2007(12):2377-2380.[6]于灏,王小刚,杨建鸣.工程图纸分割方法研究[J].现代电子技术,2019,42(13):69-72.[7]郁志宏,王栓巧,张平,等.应用改进遗传神经网络识别种蛋蛋形试验[J].农业工程学报,2009(10):340-344.[8]杨振超,章佳佳,周律,等.基于L a b V I EW的马铃薯分拣技术[J].电子科技,2017,30(9):72-74,81.[9]黄懿.基于机器视觉技术马铃薯自动分级系统的研究[D].武汉:华中农业大学,2011. [10]石瑞瑶,田有文,赖兴涛,等.基于机器视觉的苹果品质在线分级检测[J].中国农业科技导报,2018,20(3):80-86.[11]于灏,杨建鸣,王小刚.基于工图图像的法兰三维重建方法研究[J].机械设计与制造,2020(11):221-223,227.㊃821㊃总第541期内蒙古科技与经济。
基于计算机视觉的番茄识别与定位技术研究
江苏大学硕士学位论文基于计算机视觉的番茄识别与定位技术研究姓名:***申请学位级别:硕士专业:农产品加工及贮藏工程指导教师:***20040501与背景的分离。
2.4.I颜色分割图2-3是采集到的一幅图像,采集条件是夏天,晴天,下午六点左右,光照较柔和。
图像上具有方形标记的是红色成熟番茄,共两个.机器人实际工作时每当采摘了一个番茄,旁边的番茄位置会受采摘结果影响而有所变动,在下次采摘前还需要进行图像采集,进行再次识别,所以每次识别结果只需识别出一个番茄即可.图2-3原始图像图像由像素构成,每个像素颜色值有差异,从而造就了五彩斑斓的彩色图像。
番茄既然与背景存在颜色差异,构成番茄的像素的颜色值同构成背景的像素的颜色值必然存在差异。
表2-6是对图2—3上成熟番茄与背景分别选取20个像素得到的颜色数据。
采样时尽量选取具有代表性的点。
番茄上像素的选择从周围向中心、再从中心向周围选取;背景上从不同叶子、不同的茎、枯萎的叶子、透过枝叶的天空上选取,绿色的叶子、茎上选取稍多些,因为背景中绿色的叶子和茎所占比例较大。
数据采集完毕,为了观察方便,利用MicrosoftExcel软件分别对两组数据按照R、G、B值优先顺序从小到大排序。
灰度值变为255。
处理后的图像如图2—7所示。
图2-6颜色分割后的图像图2-7颜色分割的效果图从图2-7可以看出,经过第一次分割后,图像上仍然存在许多属于背景的像素没有被去除,需要进行进一步的分割。
2.4.2灰度分割经过颜色分割后,图像上除了属于番茄的像素,还有部分属于背景的像素。
这些属于背景的像素的灰度值相对于属于番茄的像素的灰度值来说是比较小的,因为在原始图像上,这部分像素属于枯萎的枝叶,其原来的颜色值中虽然R>G,但是二者差值很小;而原始图像中属于红色番茄的像素的颜色值中R与G的差值相对较大.这样在经过第一次分割后的图像中,就存在进行灰度阈值分割的可能性。
图2-8图2-6的灰度分布图图2—8是原始图像经过第一次分割后的灰度分布直方图。
吉林大学《有机化学实验》番茄色素的提取分离ppt课件
实验步骤
1 提取: 〔1〕番茄酱约5g于100mL烧瓶
中,加10mL 95%乙醇,在电热套内 加热回流5min,冷却后用折叠滤纸 过滤,将滤液直接过滤至预备好的 分液漏斗内。
番茄色素提取过程
饱和氯化钠 萃取 参与少量枯燥剂
〔2〕滤渣重新装回圆底烧瓶内,参 与10mL 二氯甲烷,加热回流5min, 冷却后用折叠滤纸过滤,将滤液直 接过滤至分液漏斗内。
分散等景象,而影响分别
效果。
• 计算比移值
Rf 值的意义: 定性分析的目的 评价展开剂选择能否适宜、评价分别效果
薄层层析:Rf 0.30~0.80, △Rf ≥0.05
〔2〕加样:提取液无水硫酸钠枯燥后,将 绝大部分〔仅留作1mL左右够薄层点样用 即可〕参与到50mL小烧杯中,加1.0g柱 层析氧化铝,搅拌均匀后于通风橱内 4045°水浴挥发掉溶剂。〔留意:温度不能 高,否那么迸溅;用玻璃棒不断搅拌,留 意维护眼睛〕
将溶剂彻底蒸干后,将吸附有提取色素的 氧化铝样品小心加到柱上, 并在样品层上 面加一略小于柱内径的滤纸片。
固定相:固定不动,对样品产生保管作用的物质。 流动相:带动样品,经过固定相的物质。 色谱过程的本质:是样品在固定相中吸附与解析的过程。
色谱法分类
按分别机制,可分为: 吸附色谱:分子在两相中吸附性能不同,进展分别 分配色谱:分子在两相中分配系数不同,进展分别 离子交换色谱:分子在两相中离子交换性能不同,进展分别 体积排阻色谱:体积大的留在固定相的小孔内,体积小的先
天然产物提取法:采用有机溶剂〔如石油 醚、氯仿、丙酮、乙醚、乙醇等〕萃取番 茄红素和β-胡萝卜素。
色谱法:进一步分别和纯化番茄红素和β-胡 萝卜素。
基于机器视觉的番茄内部品质预测_张亚静
第26卷增刊2 农业工程学报 V ol.26 Supp.2366 2010年12月 Transactions of the CSAE Dec. 2010 基于机器视觉的番茄内部品质预测张亚静1,Sakae Shibusawa2,李民赞1※(1. 中国农业大学现代精细农业系统集成研究教育部重点实验室,北京 100083;2. 东京农工大学农学部,东京 183-8509)摘要:为了实现番茄内部品质的实施快速检测,利用机器视觉技术,从“定性”和“定量”两方面进行了番茄内部品质预测方法的研究。
首先设计开发了番茄图像采集机器视觉系统,可分别从3个不同高度:0.5、1、1.5 m和6个不同方向:上、下、左、右、前、后采集番茄图像。
视觉系统利用4个卤素灯作为光源,内部亮度恒定为600 lx。
然后收集了68个不同生长阶段的番茄样本,样本根据是颜色从未成熟阶段(绿色)到成熟阶段(红色)被分为了5个等级。
在利用开发的机器视觉系统采集了番茄样本的图像之后,通过RGB色彩模型、L*a*b*色彩模型和灰度共生矩阵(GLCM)计算番茄图像特征值,并将其输入BP神经网络,对糖度、酸度、氨基酸含量和水分含量共4种番茄内部品质进行预测。
在“定量”预测中,分别建立了每种内部品质的预测模型。
结果表明,酸度与图像特征之间的相关系数最高为0.536,定量预测精度还有待进一步提高。
在“定性”预测中,利用BP神经网络,通过番茄内部属性含量的不同组合值预测番茄生长阶段,对隐层节点数和训练函数这两个重要的网络参数进行优化。
试验中使用40个样本作为训练集建立模型,使用28个样本作为测试集,其中22个样本预测正确,结果表明利用机器视觉方法预测番茄内部品质具有较好应用前景。
关键词:农产品,神经网络,图像处理doi:10.3969/j.issn.1002-6819.2010.z2.069中图分类号:TP391.41 文献标识码:A 文章编号:1002-6819(2010)-Supp.2-0366-05张亚静,Sakae Shibusawa,李民赞. 基于机器视觉的番茄内部品质预测[J]. 农业工程学报,2010,26(Supp.2):366-370.Zhang Yajing, Sakae Shibusawa, Li Minzan. Prediction of tomato inner quality based on machine vision [J]. Transactions of the CSAE, 2010, 26(Supp.2): 366-370. (in Chinese with English abstract)0 引 言随着果蔬商品日益规范化,其进入市场流通时必须要通过分级、包装、装箱等多个流水线环节才能完成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
arc cos
R G R B G B
2 1 2
S 1
3 min( R, G, B) RG B
I
1 R G B 3
LAB色域空间
Y 0.299 R 0.587G 0.114 B Cb 0.172 R-0.339G 0.511B 128 Cr 0.511R 0.428G 0.083B 128
R ' 1.164(Y 16) 1.596(Cr 128) G ' 1.164(Y 16) 0.813(Cr 128) 0.391(Cb 128) B ' 1.164(Y 16) 2.018(Cb 128)
分割结果
由最后的分割结果可以看出,很明显存在一些过分割。
数学形态学是新兴的图像处理与分析方法, 1964年法国和德 国的科学家在研究岩石结构时建立的。 数学形态学应用几乎涵盖了图像处理的所有领域,在图像检 测、生物医学图像分析、机器视觉等方面取得了非常成功的应用。 形态学操作是由一组形态学代数运算子组成的,它的基本运 算有4个: 膨胀、腐蚀、开启、闭合 二值形态学图像处理基本操作: 边界抽取、区域填充、连接分量提取、凸壳算法、细化、粗 化、骨架、修剪等。
Lab色彩模型是由亮度(L)和有关色彩的a, b三个要素组 成。L表示亮度(Luminosity),a表示从洋红色至绿色的范围,b 表示从黄色至蓝色的范围。
X 0.49 R 0.31 G 0.2 B Y 0.177 R 0.812 G 0.011 B Z 的目的主要有两个:一是产生更适合人 类视觉观察和识别的图像,二是希望计算机能够自动 进行识别和理解图像。 图像分割是图像处理和分析的基础,接下来的特 征提取、目标识别等任务的结果好坏,都取决于图像 分割的质量如何。 现有的图像分割方法主要分以下几类:基于阈值 的分割方法、基于区域的分割方法、基于边缘的分割 方法以及基于特定理论的分割方法等。
基于机器视觉的番茄目标提取
研究背景
当前,随着新的农业生产模式和新技术的发展与应用,农业 机器人已愈来愈成为农业生产的主力军。采摘机器人作为农业机器 人的重要类型,具有很大的发展潜力。采摘机器人的应用将会节省 大量的人力、物力和时间。 目前采摘机器人主要应用于成熟果蔬目标的采摘,研究对象 主要有苹果、柑橘、草莓、葡萄、西瓜、黄瓜、番茄/樱桃番茄、 茄子、甘蓝、生菜、莴苣、蘑菇等。 成熟果蔬的目标提取是农业采摘机器人进行成熟果蔬定位和 采摘的基础。目标提取主要依赖于数字图像处理的相关知识。本设 计主要利用数字图像处理的方法来实现对成熟番茄目标的提取。
分水岭分割算法的主要目的就是找出集水盆地之间的分水线。
集水盆地
Watershed
使用距离变换的分水岭分割: 针对分割,与分水岭变换相配合的常用工具是距离变换。具体 实现方法: 首先,将图像二值化,下一步对图像求补,计算距离变换。然 后,用watershed函数计算距离变换的负分水岭变换。最后,以黑 色叠加二值图像上的分水岭脊线。
5
结果分析
谢谢大家!
YUV色彩空间
YUV是被欧洲电视系统所采用的一种颜色编码方法,是PAL和 SECAM模拟彩色电视制式采用的颜色空间。 伽马校正后的 RGB(用 R'G'B'表示)和 YUV 的转换方程:
Y 0.299 R 0.587G 0.114 B U 0.147 R 0.289G 0.436 B 0.493 B Y V 0.615R 0.515G 0.100 B 0.877 R Y
大律法(otsu)(最大类间方差法)
OTSU算法定义:该算法是在灰度直方图 的基础上用最小二乘法原理推导出来的, 具有统计意义上的最佳分割阈值。
基本思路是:它是按图像的灰度特 性,将图像分成背景和目标两部分。背景 和目标之间的类间方差越大,说明构成图 像的两部分的差别越大,当部分目标被错 误的分为背景或部分背景被错误的分为 目标都会导致两部分差别变小。因此,使 类间方差最大的分割意味着错分概率最 小。 MATLAB中提供了大津阈值分割的函数 graythresh
R Y 1.140V G Y 0.395U 0.581V B Y 2.032U
YCbCr色彩空间
YCbCr 颜色空间作为 ITU-R BT.601 的一部分发展起来的, YCbCr 由 YUV 色彩空间缩放和偏移得到。主要应用于彩色图像压 缩。 RGB色彩空间到YCbCr色彩空间的转换:
提纲
利用图像处理的方法提取成熟番茄目标。主要运用图像分 割技术。 1
图像预处理
2 3
形态学处理完善分割结果
图像分割
4
提取目标
5
结果分析
1
图像预处理
图像预处理,主要为了提 取图像在不同颜色空间的各个 分量。通过对不同色彩空间各 不同分量进行比较,选择出合 适色彩空间的通道分量,用来 进行下一步的图像分割处理。 右图所示为所需要进行目 标提取的原始图像,该图像由 RGB色彩空间表示。
闭运算
闭操作可使轮廓线更光滑,闭操作通常消弥狭窄的间断和长细 的鸿沟,消除小的空洞,并填补轮廓线中的断裂。闭运算处理后的 图像内部存在孔洞,利用区域填充消除孔洞。
目标提取
将最终进行形态学处理 后的分割结果进行标记( bwlabel),对于存在噪声的 图像,可以先通过比较面积 值的方法,去除小面积区域 (bwareaopen),消除噪声 影响。最后,用矩形框在原 图上将已经标记的目标圈出 来(boundingbox)。
L 116 f (y) 16 a 500 f X f Y 0.982 Z b 200 f Y f 1.183
1 t 3 t 0.008856 f (t) 7.787t 0.138 t 0.008856
MATLAB中提供了用于转换的函数rgb2ycbcr
HSI色彩空间
HSI模型是美国色彩学家孟塞尔(H.A.Munseu)于1915年提出的 ,它反映了人的视觉系统感知彩色的方式,以色调、饱和度和强度 三种基本特征量来感知颜色。 RGB到HSI转换方程: 1 , B G R G R B 其中 H 2
RGB色彩空间
RGB色彩空间在计算机图形中广泛使用红,绿和蓝(RGB) 颜色空间。红,绿,蓝是三种主要的相加色(不同的颜色加在 一起形成所需的颜色)。
由RGB各分量各分量的显示效果可以看出,R、G、B三个分 量图像中,目标与背景的对比都不是很明显,不适宜做分割处 理,因此,选择其他的色彩空间进行处理
区域分割
基本思想是根据图像数据的特征将图像空间划分为不同 的区域,然后根据不同区域的不同特征进行图像分割。
区域生长法
区域生长的基本思想是将具有相似性质的像素集合起来构成区 域。进行区域生长分割图像时,先对每个需要分割的区域找一个种 子像素作为生长的起点,然后将种子像素周围邻域中与种子像素有 相同或相似性质的像素合并到种子像素所在的区域中。 算法实现: (1)如何选择一个或一组能正确代表所需区域的种子像素; (2)如何确定在生长过程中能将相邻像素包括进来的准则; (3)如何确定生长终止的条件和规则。 g, NR, SI ,TI regiongrow f , S,T 其中:f为输入图像,S为种子,T为阈值;g为分割后的图像; NR为连通区域的数目;SI为一幅包含有种子点的图像;TI是包含在 经过连通前通过阈值测试的像素。
MATLAB中提供了转换函数srgb2lab
LAB空间a分量直方图
通过对各色彩空间各分量的对比,发现,LAB空间a分量的对比 较其它空间更为明显。查看其直方图:
由直方图可看出,基本上是双峰图,适宜下一步的阈值分割处 理。
由分割结果可以看出,区域生长法分割的结果存在过分割的现 象
分水岭分割
分水岭是地理学中的一个名词。将两个水域分开的山岭。分水岭 变换的概念用于灰度图像处理,解决图像分割的问题。
地形图: (1) 低洼:地形表面上总会有一些局部 最小值点。落在这些点的雨水不会 流向它处。 (2) 集水盆地:在一些点上,降落的雨 水会沿着地形表面往低处流,最终 流向同一个低洼,这些点称为与该 低洼相关的集水盆地。 (3) 分水岭:在一些点上,降落的雨水 可能会等概率地流向不同的低洼, 将这些点称为分水线,就是 Watershed.
迭代法
迭代法:一种不断利用已知的变量 旧值递推出新值的过程。 迭代法选取阈值的方法为:初始阈 值选取为图像的平均灰度T,然后用T将 图像的象素点分作两部分,计算两部分 各自的平均灰度,小于T的部分为Ta, 大于T的部分为Tb,求Ta和Tb的平均值 T1将T1作为新的全局阈值代替T,重复以 上过程,如此迭代,直至Tk收敛。Tk设 置为0.5。 迭代法分割仿真结果可以看出:迭 代所得的阈值分割的图像效果良好。但 对于其它直方图双峰不明显,或图像目 标和背景比例差异悬殊的图像,迭代法 则不能得到很好的分割效果。
双峰法
60年代中期,Prewitt提 出了直方图双峰法,即如果灰 度级直方图呈明显的双峰状, 则选取两峰之间的谷底所对应 的灰度级作为阈值。
图 像 灰 度 直 方 图 P
暗 Z1
Zi
背景
Zt Zj
目标
Zk
亮
大津阈值分割