基于LabVIEW的汽车制动防抱死远程实验系统设计
基于LabVIEW的实验室仪器远程控制管理系统

基于LabVIEW的实验室仪器远程控制管理系统在当今科技迅速发展的时代,实验室仪器的管理和控制方式也在不断地革新。
基于 LabVIEW 的实验室仪器远程控制管理系统应运而生,为实验室的高效运作和科学研究提供了有力的支持。
LabVIEW 是一种图形化编程环境,它具有强大的数据采集、分析和控制功能。
利用 LabVIEW 开发实验室仪器远程控制管理系统,能够实现对仪器的远程操作、实时监测、数据记录和分析等一系列功能,极大地提高了实验效率和数据准确性。
一、系统的需求分析首先,实验室仪器远程控制管理系统需要满足不同类型仪器的接入需求。
实验室中的仪器种类繁多,包括电子测量仪器、分析仪器、物理实验仪器等,每种仪器都有其独特的通信协议和控制方式。
因此,系统需要具备良好的兼容性,能够与各种仪器进行通信和交互。
其次,系统应具备可靠的远程控制功能。
操作人员可以通过网络在异地对实验室仪器进行启动、停止、参数设置等操作,并且能够实时获取仪器的工作状态和反馈信息。
这不仅方便了实验人员的工作,还能够在紧急情况下及时停止实验,保障人员和设备的安全。
此外,数据采集和处理也是系统的重要需求之一。
系统需要能够准确地采集仪器产生的数据,并进行实时处理和分析,为实验研究提供有价值的信息。
同时,数据的存储和管理也至关重要,以便后续的查询和回溯。
二、系统的总体架构基于 LabVIEW 的实验室仪器远程控制管理系统通常由仪器端、服务器端和客户端三部分组成。
仪器端负责与实际的实验室仪器进行连接和通信,采集仪器的工作数据和状态信息,并将其上传至服务器端。
为了实现与不同仪器的通信,通常需要使用各种通信接口和协议转换模块。
服务器端是系统的核心部分,负责接收和处理来自仪器端的数据,同时响应客户端的请求。
服务器端需要具备强大的数据处理能力和存储能力,以保证系统的稳定运行和数据的安全性。
客户端则是提供给用户的操作界面,用户可以通过客户端远程访问服务器,实现对实验室仪器的控制和管理。
基于 LabVIEW 的车辆制动性能仿真软件设计应用

基于 LabVIEW 的车辆制动性能仿真软件设计应用范例;王开松【摘要】Vehicle braking performance is calculated by the simulation software of vehicle braking performance which programmed by LabVIEW. Influence caused by parameters is described through the curves.The LabVIEW software can realize the parameters calculation of the vehicle, and it has the characteristics of friendly program interface and high system realiability.The simu-lation results of the vehicle braking performance can be used to optimize the parameters of the vehicle,so as to enhance the vehicle braking performance.%利用 LabVIEW 软件编写车辆制动性能仿真程序并对车辆制动性能进行仿真计算,通过图表直观地描述各参数对汽车制动性能的影响。
该软件能够实现车辆参数的采集计算,且具有程序界面友好、仿真结果准确、系统可靠性高的特点。
汽车制动性仿真结果有助于车辆结构参数的优化,从而达到提高车辆制动性能的目的。
【期刊名称】《山东理工大学学报(自然科学版)》【年(卷),期】2015(000)003【总页数】4页(P11-14)【关键词】车辆制动性能;仿真计算;LabVIEW【作者】范例;王开松【作者单位】安徽理工大学机械工程学院,安徽淮南 232001; 东北大学机械工程学院,辽宁沈阳 110004;安徽理工大学机械工程学院,安徽淮南 232001【正文语种】中文【中图分类】U461.3汽车制动性能作为汽车最重要的性能之一,决定着车辆行驶安全.制动性能的评价指标包括:制动效能、制动效能的恒定性和制动时汽车的方向稳定性.制动效率定义为车轮不锁死的最大减速度与车轮和地面附着系数的比值制动效率表明了汽车在一定路面上能够利用制动力的最大能力[1-3].本文利用LabVIEW程序的数据采集模块对汽车制动性能相关参数进行采集并输入到程序框图中.文中主要研究制动器制动力分配系数为定值时,车辆在不同路面时的制动力利用情况,并对不同类型的双回路制动系统发生部分失效时的制动力利用情况以及滑水现象临界车速进行仿真计算.本文以前、后制动器制动力分配比例为定值的车辆为研究模型,根据制动管路布置形式的不同分成如图1所示的三种形式.对以上三种不同类型车辆的制动力利用情况进行仿真.当双回路制动系统正常工作时,前、后轴制动效率的计算公式为式中:z为制动强度;φf、φr分别为前、后轴利用附着系数;β为制动器制动力分配系数;L为汽车轴距,L=a+b,a、b分别为质心到前、后轴距离;hg为质心高度. 当A型制动系统中的管路1失效时,后轴的制动效率计算公式为当A型制动系统中的管路2失效时,前轴的制动效率计算公式为高速行驶的汽车经过有积水层的路面,出现滑水现象.车辆发生滑水现象的临界车速与轮胎气压有直接关系,公式表述如下[1,3]:式中,Pi为轮胎充气气压(kPa).车辆制动性能仿真系统运行流程图如图2所示,系统登录界面如图3所示.车辆在不同装载条件下的制动效率计算程序框图如图4所示.此程序框图使用了while循环和公式节点,其中while循环采样对象是路面附着系数,采样范围从0.0到1.0,采样频率为0.1[4].制动管路布置形式不同的车辆在制动管路部分失效下的制动效率计算程序框图如图5所示.因为(B)、(C)两种形式的制动系统在管路部分失效时的制动效率计算公式相同,故只计算了(A)和(B)两种双回路制动系统在管路部分失效时的制动效率.现有某型货车的结构参数见表1[5-6],利用LabVIEW程序对其相关参数进行采集并输入到程序框图中.不同布置形式的双制动管路系统如图6所示.货车在空载和满载下的前、后轴制动效率计算结果如图7、图8所示.由图7、图8可看出,空载条件下的制动过程中,任何路面条件下前轴都会首先抱死.而在满载情况下,只有在路面附着系数为0.42时,前、后轴才会同时抱死,制动力效率达到最大值.货车按图6所示分别装有三种不同形式的双回路制动系统.当采用(A)管路形式,管路1、2分别发生失效时,只有后、前轴具有制动力[7].此时制动效率随路面附着系数的变化曲线如图9、图10所示.由图9、图10可知,(A)形式管路1发生失效,此时后轴制动效率最大值只有54%,随路面附着系数的增大而单调递减.(A)形式管路2发生失效,此时前轴制动效率最大值只有62%,随路面附着系数的增加单调递增.(B)、(C)形式管路1、2分别发生失效时的制动效率变化曲线如图11所示.图11中,前、后轴制动效率变化曲线与制动管路不发生部分失效时的变化曲线相同,只是车辆总制动力减少为没有发生部分失效时的50%.在制动效率和制动强度上(B)、(C)形式是相同的,区别在于(B)形式实现左右侧轮制动器制动力的完全相等比较困难,(C)形式一方面实现左右侧轮制动器制动力的完全相等比较困难,另一方面当其中一个管路失效时,极容易发生跑偏[8].滑水现象临界车速与轮胎充气气压的变化曲线如图12所示.由图12可以看出,滑水现象临界车速与轮胎充气气压成正比关系,轮胎充气气压越大,对应的滑水现象临界车速也就越高.当轮胎充气压力为275kPa时,对应的滑水现象临界车速为110km/h;当车速大于110km/h时,系统报警,车辆在行驶中会出现滑水现象.利用LabVIEW软件设计了车辆制动系统仿真程序,对制动器制动力分配比例为定值的货车制动效率进行了仿真计算,并且考虑到了双制动管路的布置形式不同对车辆制动效率和制动力的影响.对车辆在积水层出现滑水现象时对应的临界车速进行了计算,直观地表现出临界车速与轮胎充气压力之【相关文献】[1] 余志生.汽车理论[M].北京:机械工业出版社,2009.[2] 喻凡,林逸.汽车系统动力学[M].3版.北京:机械工业出版社,2011.[3] 吴光强.汽车理论[M].北京:人民交通出版社,2007.[4] Travis J,Kring J.LabVIEW大学实用教程[M].3版.乔瑞萍,译.北京:电子工业出版社,2010.[5] 范例.汽车综合性能评价仿真系统设计[D].西安:长安大学,2012.[6] 王杰,徐满年.EQ106轻型汽车前后制动器制动力分配比例的确定[J].汽车科技,1998(2):13-16.[7] 何宇平,姜正根.汽车制动性能分析和计算机模拟与试验验证[J].汽车工程,1995(5):28-32.[8] 刘晓玫,胡宗梅,李骏.汽车制动性能评价与建议系统的开发[J].制造业自动化,2010(4):122-124.。
基于LabVIEW的汽车ABS试验台测控系统
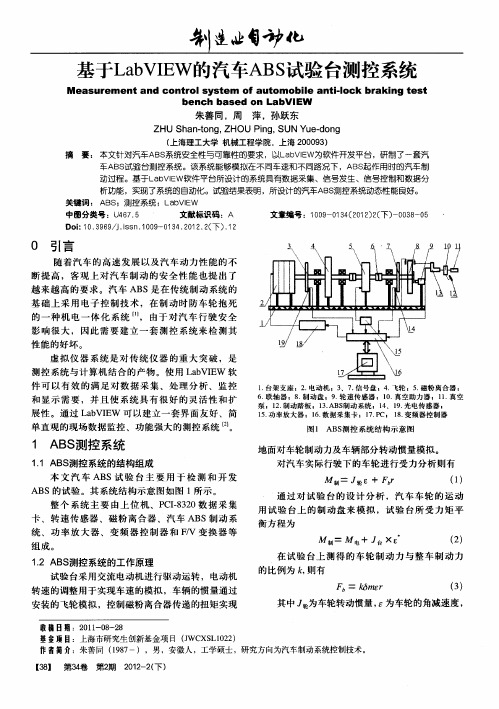
地面对 车轮制 动 力及 车辆 部分转动 惯量 模拟 。
对汽 车实 际行驶 下 的车轮进 行 受力分 析则 有 制= . £+ , , 轮 . () 1
通 过 对 试 验 台 的设 计分 析 ,汽 车 车 轮 的 运 动 用 试 验 台 上 的制 动 盘 来 模 拟 ,试 验 台所 受 力 矩 平
221 电动机 数字式 PD .. I控制设计 为 了使 测 试 系统 达 到 一 个 较 好 的控 制 效 果 ,
块 。 模 块化 使 程 序 结构 清 晰 ,针 对 不 同 的 测 试 对 象 ,编 程 各 自的子 模 块 ,每 个 子 模 块 可 以单 独使
用 ,也 可 以提 供 给 子 程 序 调 用 ,组 成 虚拟 主 控 面 板 。 图 3为 系统软 件 的结构 和功 能框 图 。
性能 的好 坏 。 虚 拟 仪 器 系 统 是 对 传 统 仪 器 的重 大 突破 ,是
测控 系统 与计算 机 结合 的 产物 。使 用 L b I W 软 aV E 件 可 以 有 效 的 满 足 对数 据 采 集 、处理 分 析 、监 控
和 显 示 需 要 ,并 且 使 系 统 具 有 很好 的灵 活 性 和 扩 展性 。通 过 L b E 可 以建立 一 套界 面友 好 、简 a VI W 单直 观 的现场数 据 监控 、功能 强大 的 测控 系统 。
D i1 .9 9 Jis .0 9 1 4 2 1 .( )1 o : 3 6 / . n 1 0-0 3 .0 2 2下 .2 0 s
0 引言
随着 汽 车 的高 速 发展 以及 汽车 动 力性 能 的 不 断 提 高 ,客 观 上 对 汽 车 制 动 的 安全 性 能 也 提 出 了 越 来越 高 的要 求 。汽 车 A BS是 在 传统 制 动 系统 的 基 础 上 采 用 电子 控 制 技 术 ,在制 动 时 防车 轮 抱 死 的 一 种 机 电 一 体 化 系 统 ”, 由于 对 汽 车 行 驶 安 全 影 响 很 大 , 因此 需 要 建 立 一 套 测控 系统 来 检 测 其
基于LabVIEW的实验室远程监控系统设计与实现
1.3.1 课题要紧研究内容............................................................................................ 2 1.3.2 关键技术研究.................................................................................................... 2 第 2 章 系统总体方案设计............................................................................................... 3 2.1 系统需求分析........................................................................................................... 3 2.2 系统网络架构........................................................................................................... 3 2.3 系统功能模块划分................................................................................................... 5 第 3 章 可视化远程监控采集系统设计........................................................................... 6 3.1 系统硬件构成........................................................................................................... 6 3.2 传感器的选型........................................................................................................... 7 第 4 章 基于 LabVIEW 的监控系统设计..................................................................... 11 4.1 系统模块划分......................................................................................................... 11 4.2 用户认证模块设计................................................................................................. 11 4.3 用户界面设计......................................................................................................... 13 4.4 程序结构设计......................................................................................................... 15 4.5 数据采集模块设计................................................................................................. 16 4.5.1 模拟信号采集与显示模块设计 ...................................................................... 17 4.5.2 开关信号采集与显示模块设计...................................................................... 17 4.5.3 空调与照明开关输出模块设计...................................................................... 18 4.5.4 称重实验模块设计.......................................................................................... 18 4.5.5 涡流实验模块设计.......................................................................................... 20 4.5.6 转速测控实验模块设计.................................................................................. 21 4.5.7 振动实验模块设计.......................................................................................... 23 4.6 图像采集及压缩..................................................................................................... 24 4.6.1 图像采集.......................................................................................................... 24 4.6.2 图像压缩与远程传输...................................................................................... 26 4.7 系统远程公布的实现............................................................................................. 30 4.7.1 基于 DataSocket 的远程通信方式 ................................................................. 30 4.7.2 远程 Web 访问 ................................................................................................ 31 4.7.3 可视化监控系统远程公布实现...................................................................... 32 第 5 章 系统实现与运行................................................................................................. 37 第 6 章 终止语 ................................................................................................................. 42 答谢辞
基于LabVIEW的汽车ABS测试系统设计

基于LabVIEW的汽车ABS测试系统设计
张文广;杜春臣;司利增
【期刊名称】《机械制造与自动化》
【年(卷),期】2012(041)005
【摘要】ABS是汽车的一种重要主动安全装置.以图形化编程软件LabVIEW为核心,结合数据采集卡,设计了汽车ABS测试系统.该系统能够实现制动车速、制动距离、角速度、滑移率等性能参数的实时显示与存储,便于对ABS性能进行分析以及对控制算法进行优化改进,从而为开发和研制汽车防抱死制动系统提供了测试依据.【总页数】3页(P133-134,149)
【作者】张文广;杜春臣;司利增
【作者单位】长安大学汽车学院,陕西西安710064;长安大学汽车学院,陕西西安710064;长安大学汽车学院,陕西西安710064
【正文语种】中文
【中图分类】TH12;TP391.76
【相关文献】
1.基于LabVIEW的汽车防溜车模拟测试系统设计 [J], 黄喜军;陈辉金;张龙;黄佳辉;杨宇
2.基于LabVIEW的汽车发动机油耗与动力性能测试系统设计 [J], 廖燕辉
3.基于Labview的汽车制动阀测试系统设计 [J], 王磊
4.基于LabVIEW的电动汽车动力电池测试系统设计 [J], 郁俊伟;李旭东;赵奉奎
5.基于LabVIEW的电动汽车动力电池测试系统设计 [J], 郁俊伟;李旭东;赵奉奎
因版权原因,仅展示原文概要,查看原文内容请购买。
基于LabVIEW仿真设计汽车制动速度控制系统
充分发挥 L a b V I E W 灵活 、 开放 、 形象、 直观 、 易操 作等特点 , 设计 了一套 汽车制动 器速度控 制仿真 系统 , 为汽车制动器速度控制提供 了一条新 的途径 。
【 关键词】 汽车制动器 ; 速度控制 ; L a b V I E W; 仿 真设计
[ 中图分 类号】U 4 7 2 . 9 [ 文献标 识码]A [ 文章编号 ]1 0 0 9 - 9 0 4 2 ( 2 0 1 4 ) 0 3 - 0 0 7 8 03 -
Ke y wo r d s : a u t o mo b i l e b r a k e ;s p e e d c o n t r o l ;L a b V I E W ;s i mu l a t i o n d e s i g n
汽车制 动性 能 好 坏对 汽 车 品质 、 市 场竞 争 力 、 使 用寿命等 都有 重要 影 响 。汽 车 时常 因出现 “ 急动” 或 “ 猛推 冲击 ” 等 现象 而 导 致 机 件损 坏 , 并 引 发 安 全 事 故, 因此 , 汽车制 动 过 程 中速 度 控制 已引 起 了 国 内外 专家学者 以及 工 程 技术 人 员 的关 注 。鉴 于 汽车 制 动 器现场调 试 困难 、 风险大 、 维修 成本 高 的特 点 , 本 文 采 用L a b V I E W 软件仿 真模拟汽车 制动速度控制 , 通过理
制动 器一 般 由安装 了 飞 轮组 的 主 轴 、 驱 动 主轴
论建模与仿真设计相结合的方法 , 为制动器性能检测 与验证 提供 了一 个安全 、 可靠 、 高效 的仿真 系统 。
旋转 的 电动机 、 底座 、 施加 制 动 的辅 助装 置 以及 测量 和控制系统等组成。工作时 , 电动机带动 主轴 和飞 轮旋 转 , 达 到 与设 定 的车 速相 当 的转 速 后 电 动机 断 电同 时施 加 制 动 , 当满 足设 定 的结 束 条 件 时 就称 为 完成 一次 制动 。 设 飞轮 的厚度 为 h , 密度为 P , 内半 径 为 r n , 外半 径为 r 。连续 分布 刚体 转动 惯量
基于LabVIEW的汽车ABS硬件在环试验
合肥工业大学学报(自然科学版)
第32卷
1试验系统结构
整个试验系统由上位机、下位机、接口系统及 控制对象组成。上位机主要进行LabVIEW的软 件编程;下位机是一台美国NI公司的PXI-8196 板卡,该板卡提供了一个实时操作系统,用以实现 控制程序的执行;接口系统起到了承上启下的作 用,它一方面将通过传感器获得的控制对象信号 输入到控制器,另一方面将控制器控制输出信号 发送到控制对象。整个试验结构如图1所示。
掣一k 瓦一Tb,咏一Tb,h=FR一 sgn(s)(12)
2,2接口系统控制程序开发 接口系统控制程序主要包括信号采集程序及
控制信号输出程序。 对于信号采集程序,需要进行信号类型(数字
或模拟)、采集端口、采样模式及采样频率等的设 置。在LabVIEW中,有相关的虚拟仪器供用户 编程使用。在这罨,分别选择J,aiO、ail及ai2这 3个模拟端口,采用连续采样模式进行车轮转速、 加速度、制动开关传感器信号的采集。选用3阶 Butterworth低通滤波器(截止频率20 kHz)对采 样信号进行滤波。信号输出程序与信号采集程序 类似,在这里,选择了8个数字输出端口,实现对 常开阀和常闭阀的控制。 2.3轮速信号处理
汽车防抱制动系统中,滑移率和车轮角加速 度的计算,都是基于对轮速的正确处理。因此,要 实现良好的控制效果,轮速的正确处理是首要的。 常用的轮速计算方法有频率法和周期法。由于 ABS在低速(设置20 km/h)时不起作用,这样就 大大降低了频率法在低速时的测试误差。同时, 频率法对轮速高频测量有较高的精度,所以采用 了频率法进行轮速的处理。轮速计算为
ECU控制程序由初始逻辑判断和控制执行 程序2部分组成。
(1)初始逻辑判断部分。主要是通过传感器 信号进行初始判断,决定是否启动防抱制动控制 执行程序。初始逻辑判断部分设计如下:①如果 制动开关信号为低电平,不启动防抱制动控制执 行程序;②如果制动开关信号为高电平,且车速 不高于20 km/h,不启动防抱制动控制执行程序; ③制动开关信号为高电平,并且车速高于 20 km/h,启动防抱制动控制执行程序。
基于Labview的汽车制动阀测试系统设计
文章编号:1007-757X(2019)09-0117-04基于Labview的汽车制动阀测试系统设计王磊(安康学院电子与信息工程学院,安康725000)摘 要:作为汽车制动系统的执行机构,气制动阀是完成制动动作的核心部件,其性能优劣直接影响汽车的行车安全。
目前,生产线上对阀类部件的测试工作多限于密封性检测,无法满足动静特性试验的需求。
为此,采用Labview为平台,设计了一款汽车制动阀性能测试系统,能够实现对气制动阀动静特性的在线检测,提供可靠的测试数据。
关键词:制动阀;自动测试;Labview中图分类号:TP216+.3 文献标志码:ADesign of Automobile Brake Valve Test System Based on LabviewWANG Lei(College of Electronics and Information Engineering,Ankang University,Ankang 725099)Abstract:As the actuator of automobile brake system,pneumatic brake valve is the core component to complete braking action.Its performance directly affects the safety of automobile driving.At present,the testing of valve components in production lineis mostly limited to sealing test,which cannot meet the requirements of dynamic and static characteristics test.For this reason,this paper uses Labview as the platform to design the performance test system for the automobile brake valve,the system canrealize on-line detection of dynamic and static characteristics of pneumatic brake valve and provide reliable test data.Key words:Brake valve;Automatic test;Labview0 引言汽车制动系统是汽车行驶安全的重要保证,随着汽车产业的不断发展,车速和车流密度持续提高,汽车制动系统的工作可靠性变得越来越重要。
基于LabVIEW的ABS车载性能检测系统设计
关键b VI E W; 性能检测
中图分 类号 :T P 2 7 4
文献标识 码 :A
文章编号 :1 6 7 4 — 6 2 3 6 ( 2 0 1 4 ) 0 1 - 0 1 1 7 - 0 3
第2 2 卷 第 1期
V o 1 . 2 2 NO . 1
电子设计 工程
E l e c t r o n i c De s i g n En g i n e e r i n g
2 0 1 4年 1月
J a n. 2 01 4
基亏 L a b V I E W 的A B S车载 性能检 测 系统设计
De s i g n o f ABS V e h i c l e - mo u n t e d Pe r f o r ma n c e T e s t S y s t e m Ba s e d o n La b  ̄ I EW
Z UO Xi a o - f a n g , YOU L i - h u a , W ANG Yu n , HUA Yi
( S c h o o l o f Me c h a n i c a l E n g i n e e r i n g , J i a n g n a n U n i v e r s i t y , W u x i 2 1 4 1 2 2 , C h i n a )
Ab s t r a c t :W i t h L a b VI E W a s t he c o r e d e s i g n o f t h e ABS Ve h i c l e — mo u n t e d p e f r o r ma n c e t e s t s y s t e m, u s i n g mo d u l a r d e s i n g c o n c e p t , Ef f e c t i v e l y d i v i d e t h e s y s t e m o n t h e b a s e o f p e f r o r ma n c e p a r a me t e r s , S e n s o r s y s t e m wi t h h J g h a c c u r a c y a n d e a s y t o i n s t a l l,mo d e r n s i na g l i f l t e r p r o c e s s i n g me t h o d i s p e f r o r me d t o i mp r o v e t h e s i g n a l t o n o i s e r a t i o . F i r e n d l y i n t e r a c t i v e i n t e fa r c e ,c a n r e a l —t i me r e a d t h e ABS p e fo r m a r n c e p a r a me t e r s o f t h e c a r c o r r e s p o n d s t o t h e a c t u a l p r o c e s s o f mo v i n g , c o mp l e t e d r e a l —t i me o n l i n e t e s t i n g o f b r a k i n g d i s t a n c e p a r a me t e r s a n d d i r e c t i o n a l s t a b i l i t y p a r a me t e r s d u in r g b r a k i n g. De r e c t i o n p a r a me t e r s b e c o me mo r e p r a c t i c l a s i ni g i f c a n c e a n d l a i d t h e ou f n d a t i o n f o r t h e Au t o ABS f a u l t d e t e c t i o n .
基于LabVIEW的汽车ABS性能检测系统仿真研究
制动性能检测系统进行了仿真研究 。该 系统能实现制动距离 、制动时间、滑移率等性 能参数的检测及其数据处理 、曲线显示
和数据存储等功能 , 为开发和研制汽车 AB S性能检测系统提供 了理 沦基础 。
关键词: S L b E ; AB ; a VI W 制动 性 能 ; 拟 仪 器 ; 测 虚 俭
T s y t m a e n L b E e t se B s do a VI W S
.
AN n - n W A NG ef n P Yo g do g , Yu -a g , ANG n , Ra ZHAO o q a Gu - in
( . e a met f uo t e n ier g H i n j n sttOf eh o g , ri 0 5 h a; 1D pr n A t t o moi gnei , e o gi gI tu T cn l yHa n1 0 0 i vE n l a ni e o b 5 C n
a q ii o t c u st n wi USB b sa m o h v l a i n n r a d t e t s i g sa d r ft e v h c e b a n e f r n e I a i h u i f rt e e a u t o m n h e t t n a d o e i l r ki g p r o ma c . t n o n h c s o t e b a i g p r o m a c u h a h r k n i t n e t e so i , h l n r w h o r s o d n u v , h w h r k n e f r n e s c s t e b a i g d sa c , h t p tme t e si a d d a t e c r e p n i g c r e p t e u p tt e t s e u t . i a e o i e h h o e i a a i o h e e r h a d d v l p h n o t u h e tr s l Th sp p r s pr v d st e t e r tc l ss f rt e r s a c n e e o me t fv h c e ABS b n e i l o p r o m a c e ts t m . e f r n e t s yse Ke r s y wo d :ABS; a VI l b EW ; r k n e f r a c ; it a n tu b a i g p ro m n e v ru l sr me t t s i g i n ; e tn
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
i n g , D a l i a n U n i v e r s i t y o f T e c h n o l o g y ,D a l i a n 1 1 6 0 2 4, C h i n a ) Ab s t r a c t :A n t i — l o c k B r a k e S y s t e m( A B S )i s o n e o f t h e i m p o r t a n t a n d c o m p l e x t e a c h i n g c o n t e n t s o f
重要和复杂 的教学 内容 。利用 虚拟 仪器技术 、网络技术 以及 L a b V I E W 设 计软 件 ,A B S实 验台 ,基 于 N I C o m- p a c t R I O数据采 集模块设计并实现 了汽 车制 动防抱死远程实验系统 。系统 由硬件实 验平 台和远程实验 网络管理 系统两部分组成 。基于该远程实验 系统完成 了 A B S系统 的远程 实验教 学 ,实现 了国内外高 校之 间实 验资源 的 共享 ,使先进教学方法 和优越 的实验室条件得到广泛利用 。
!
! = Q
实
验
5期
2 0 1 4年 l 0月
Oc t . 2 01 4
CN 1 2—1 3 5 2 / N
L AB0RAT 0RY
S CI E NCE
V0 1 . 1 7 No . 5
基于 L a b V I E W 的汽 车制 动防抱死远程 实验 系统设计
mo d e m a u t o mo t i v e e l e c t r o n i c s y s t e ms ,w h i c h c a n e f f e c t i v e l y p r e v e n t t h e w h e e l s f r o m l o c k i n g .A r e mo t e e x p e i r me n t a l s y s t e m f o r r e mo t e mo n i t o r i n g a n d c o n t r o l o f AB S i s d e s i g n e d a n d i mp l e me n t e d u s i n g v i tu r -
高仁璨 , 郑英 东, 李晓 东, 赵 剑, 胡 平
1 1 6 0 2 4 ) ( 大连 理 工 大学 运载 工程 与 力学 学部 汽 车 工程 学 院 ,辽 宁 大连
摘
要 :汽车制动防抱死 系统 ( A n t i - l o c k B r a k e S y s t e m ,A B S )可 以有效 防止车轮抱死 ,是现代汽车 电子 系统
关键词 :实验教学 ;A B S ; L a b V I E W;虚拟仪器 中图分类号 : N 3 3 ; G 6 4 2 . 4 2 3 文献标识码 : A d o i : 1 0 . 3 9 6 9 / j . i s s n . 1 6 7 2 - 4 3 0 5 . 2 0 1 4 . 0 5 . 0 1 4
i ng o f ABS a n d e x p e ime r n t l a r e s o u r c e s ha in r g a r e a c h i e v e d b y r e mo t e mo ni t o in r g a n d c o n t r o l e x p e r i —
( S t a t e K e y L a b o r a t o r y o f S t r u c t u r a l A n l a y s i s f o r I n d u s t i r a l E q u i p me n t ; S c h o o l o f A u t o m o t i v e E n g i n e e r —
a l i ns t u me r n t t e c hn o l o y ,n g e t wo r k t e c h n o l o y ,L g a b VI EW ,ABS e x p e r i me n t a l p l a t f o r m a n d NI Co mp a c - t RI O da t a a c q ui s i t i o n s y s t e m. Th e r e mo t e e x p e ime r n t l a s y s t e m c o n s i s t s o f h a r d wa r e p l a fo t m s r a nd r e -
mo t e e x p e i r me n t n e t wo r k ma n a g e me n t s y s t e m .B a s e d o n t h e r e mo t e e x p e ime r n t a l s y s t e m ,r e mo t e t e a c h —
De s i g n o f a n t i — — l o c k b r a k e r e mo t e e x p e r i me n t a l s y s t e m b a s e d o n L a b VI EW
G A O R e n — j i n g ,Z HE N G Y i n g — d o n g ,L I X i a o — d o n g ,Z HA O J i a n ,HU P i n g