Confinement of spin-0 and spin-12 particles in a mixed vector-scalar coupling with unequal
关于大课间活动的英语作文九年级
关于大课间活动的英语作文九年级全文共3篇示例,供读者参考篇1The Best Part of the School DayRecess is definitely the best part of the school day for me and my friends. We all look forward to that glorious 30 minute break in the middle of the morning where we can get some fresh air, run around, and just be kids again after sitting still for a couple of hours. Recess is our chance to recharge and get ready for the rest of the day.My friends and I have our favorite recess games and activities that we love to play each day. The choices really depend on the weather, how we're feeling that particular day, and what toys or equipment is available in the recess bins. Let me tell you about some of our top recess pastimes.Four SquareThis classic ball game is an absolute must during pretty much every recess period. There's always a heated four square tournament going on at the painted court areas. The rules are simple - use the rubber ball to eliminate the other players fromthe squares until you make it to the coveted fourth square king position. But mastering the skill of controlling the ball and strategically putting spin on it is what makes it so fun and challenging. There's nothing better than executing the perfect hand shots to take out the "king" player. Just watch out for those vicious rat killers!KickballWhen we have access to the field areas, kickball is one of our go-to recess picks. We literally spend the entire 30 minutes running bases in our made-up games of kickball. The kickball games are usually a total madhouse with tons of excitement and controversy over close plays at the bases. There's always lots of laughter and big celebrations after kicking a huge home run ball way out into the outfield. Of course, there's also plenty of good-natured arguing over foul balls and outs too. All in all, kickball makes for fantastic chaotic fun.Wall BallSometimes we get a bit lazier and just want to post up near a wall to play some hand ball games like wallball or butts up. Wallball is perfect for keeping ourselves occupied by hitting that little rubber ball back and forth off the brick wall in different patterns and challenges. We make up all sorts of variations likepicking out tiny wall targets to aim for or seeing who can do the most alternate hand hits in a row. Butts up gets even more laid back as it literally just involves taking turns serving the ball up off the wall to let it bounce before catching it on the fullaway to stay alive. Easy games like these help us relax a bit instead of running around like maniacs.Tag GamesWhen we're feeling very high energy and competitive, you'll find our group playing intense games of tag or running bases in the grassy areas. The thrill of a good tag game never gets old! Whether we're playing freeze tag, hide and seek tag, or just classic running tag, it's always a blast chasing each other around and trying out dodging moves and race tactics. Tag reminds me of being a little kid again where any game of running and laughing was the essence of fun. I love seeing my friends use their speed or strategy to avoid becoming the next "tagger" or having to hide again. Games of tag guaranteed we'd be completely worn out and sweaty by the time the recess bell rings.Just Goofing AroundOf course, a lot of our recess time is also spent just openly goofing around and doing random activities. Maybe we'll decideto have ridiculous jumping contests or hand clamping tournaments. Sometimes we'll create obstacle courses with the toys and gear in the recess bin like skipping ropes, hulahoops, balls and cones. Other times we tell weird jokes and stories or even play imagination games walking around the play areas pretending to be different characters. As long as we're being safe, recess provides that open play time for our creativity and silliness to come alive.No matter what we choose to do, recess is something we truly cherish. It gives us that daily break from the grind of schoolwork to enjoy being kids. We get to experience fun, freedom, and friendship. We can work off our pent-up energy through games and activities. We make tons of great memories together laughing, playing, and unwinding during that half-hour play period. Recess allows us to hit the restart button to go into the rest of the school day feeling refreshed.For my friends and me, recess represents the pure joys of childhood — joys that we know will become harder to find as we get older. So we make sure to soak up every second of having that dedicated recess time. We relish the opportunities to move around, be silly, play hard, tease each other, make up games, and embrace our carefree attitudes. Who knows how much longerwe'll get to experience the amazing glory of having a scheduled daily recess period? For now, we'll keep treating it as the hands-down best part of every school day.篇2Recess Time: The Best Part of the School DayRecess is the best time of the day at school! I get so excited when the recess bell rings because that means I can go outside and play with my friends for a while. Recess is a nice break from all of the hard work we do in our classes. It gives me a chance to run around, get some fresh air, and just be a kid again for a little bit.There are so many fun things we can do at recess. One of my favorite games is four square. I'm pretty good at it and I love trying to hit the ball in a way that tricks my opponent. Another classic is kickball. We divide into two teams and take turns being the kickers and fielders. When I'm up to kick, I always try to kick it as far as I can to make it harder for the fielders. Dodgeball is really exciting too, but sometimes kids can get too competitive and rough. I got hit in the face once which wasn't fun at all!If we don't feel like playing an actual game, we can always just run around on the playground equipment. The monkey barsare a great test of arm strength to see who can swing all the way across without falling. The swings are fun too when you can pump really high. Sometimes we have competitions to see who can jump off from the highest point. The slides are probably the most classic recess activity though. We'll make long chains and go down one after another over and over.When the weather is nice, we'll often spill out onto the field for recess instead of staying on the playground equipment. Playing tag or hiding games like sardines are perfect for running around in the open space. Building things in the dirt is fun too, whether it's sculpting mud pies, shaping mounds, or digging holes and tunnels. We always get totally covered in dirt by the end which drives our teachers crazy!If it's raining or snowing, we have indoor recess instead which isn't quite as fun. We're confined to the gymnasium or cafeteria instead of being able to go outside. Indoor recess is great for playing basketball though since there are court lines already marked. Sometimes they'llput on movies for us to watch, but that's not nearly as exciting as being able to run free. The janitors must hate indoor recess days because we inevitably end up with balls bouncing off the walls, kids roughhousing, and general chaos.Overall though, any recess is better than no recess in my opinion! I look forward to it every single day as a break from the monotony of sitting at desks. Recess lets me release my bottled up energy from having to be still and quiet during class. It's also nice to have time to freely socialize with my friends without teachers watching over us so closely. We can joke around, chat about our shared interests, or come up with games and activities on our own without following a curriculum.Recess is absolutely vital for a kid's psychological wellbeing. If we had to go straight from class to class without any unstructured play breaks, I think we'd all go stir crazy! It's during recess that we can take off our metaphorical classroom blinders for a little while and just be imaginative, rambunctious children again. The laughter, comradery, and sheer silliness of recess is something I hope never gets taken away as we get older. It's what keeps our inner children alive when we're stuck in the classroom for so many hours a day.So here's to many more years of recess ahead! Long live four square, kickball, tag, and the rest of the classics. Hopefully they'll let us have extra long recesses once we're in high school. Recess is what gets me through the week and gives me a chance to simply be a kid without any academic expectations for thosebrief periods. No homework, no tests, no strict rules - just freedom to play and be ourselves. What could be better than that?篇3The Big Recess: A Playground of PossibilitiesAhh, the big recess – that glorious 40-minute oasis in the middle of our school day when we're finally freed from the confinement of classrooms and can truly be kids again. For me, it's hands down the best part of being at school. No teachers droning on, no books to bury your nose in, just pure playtime bliss!The minute that recess bell rings, it's like someone lit a firecracker under the student body. We explode out of our seats, books and pencils forgotten, making a mad dash for the doors. Getting outside first is prime real estate – it allows you to stake your claim on the very best spots on the playground before they're snatched up. Lonnie and his crew always race to hunker down on the basketball court, while the tetherball kings make a beeline for their sacred circle. Claim-jumping on territory that's already been declared is grounds for a recess-long squabble at best, harsh words and pummeling at worst. It's a delicateecosystem out there on the playgrounds, and respecting the unwritten rules is crucial for survival.Once I've shimmied my way to the outer reaches of the kickball field, the real fun begins. Even though we're technically still on school grounds, hemmed in by fences and watchful teachers acting as referencias, it feels like an entirely different universe. Recess is our domain, governed by our own kid-created rituals and social hierarchies. Sure, there's always the risk of getting a dreaded recess demerit for breaking one of the million school rules, but living on the edge is half the thrill!The kickball cliques are the first to get their reigns of the field underway, marking off bases and meticulously arguing over team picks. "No, Josh has to be a captain this time since he was stuck being an oufielder during the last game!" I whine as per usual. Lucky for me, I mange to get picked for a decent team despite my lackluster kickball skills. There's nothing quite like the feeling of gaining the upper hand in a good old-fashioned sporting battle against your pals. A well-aimed kickball to Logan's noggin may technically be against the rules, but all's fair in love and recess.Over in the corner of the blacktop, the four-square champions furiously whack their worn-down rubber ball,jockeying for the coveted king position. A few reckless souls even attempt the dreaded game of dodgeball nearby, with only their lightning reflexes protecting them from searing stinger bruises. The daredevils take over the playset's metal swirls, casting caution to the wind as they traverse the scorching hot fireman's poles and rocket down the towering slides. Underdogs with clipboards in hand are always taking meticulous stats on who can swing, fling or plummet the highest - recess glory is serious business.For the less athletic crew, the periphery offers a world of more toned-down amusements. The chalk fanatics convert every inch of pavement into their colorful canvases, drawing vivid hop-scotch mazes and festooning the ground with dazzling doodles. Others engage in ever-shifting alliances ofhand-clapping games and endless diversion of double-dutch jump rope.And then there's those loose cannons - the kids who gleefully throw all rules and structure out the window. Like frolicking gazelles, they careen across the field in herds, inventing wildly imaginary games and adventures on the fly. One minute they're swooping in for a game of freeze tag, the next they're being chased by a make-believe monster only they cansee. Their peals of unrestrained laughter and shrieks are the recess soundtrack.Smack in the center of the teeming playground is what we call the Wildebeest Zone - a swirling vortex of pure kinetic energy. This is where the fearless boundary-pushers converge, pushing the limits of what one can pull off in 40 mere minutes of temporary freedom. Laughing defiantly, they parkour up the brick walls and drainpipes like little spiderkids, seeing who can swing perilously from the tetherball poles without snapping their scrawny neck. The seesaws become airborne bunkbeds, the monkey bars are transformed into pull-up challenges from hell. I admire the sheer audacity of the Wildebeests, even if watching their skull-bashing antics makes my head throb in sympathetic pain.And in the midst of this bountiful recess chaos, there's always the Renegade Runners - those mavericks who reject playgrounds and their rules altogether. Flushed with rebellion, they take off for the forest bellying the kickball field, stomping through mud puddles and scrambling up mossy embankments to carve out their own off-the-grid sanctuaries in the wilderness. We envy their brash flaunting of authority, but only the bravestor most desperate souls ever actually attempt to join their outlaw ranks.Inevitably, the absence of any adults imposing order and discipline means that recess politics can get downright intense. Those who seemed like casual acquaintances mere minutes ago are suddenly embroiled in inter-squad beefs and smack-talking feuds, usually over perceived switching of positions in thefour-square hierarchy or whose swing dig was a little toobully-ish. Grudge matches and sneak attacks are plotted, frantic diplomacy and peace treaties are attempted. It's like the entire school's social ecosystem gets reset and rebooted each day during those pivotal 40 minutes - which is both glorious and utterly exhausting.Of course, then the hated recess bell has to chime again, our siren summoning us to harsh reality. That first shrill note is like a gunshot releasing a flock of scattered birds. We scatter in a dozen different directions, dawdling and stalling as long as humanly possible. Prolonging those last joyous gasps of recess freedom feels like defying death itself. We'll kick up gravel, engage in marathon-sprints to stay outside for just a few more seconds, maybe flick a curse word or two in the direction of the playground proctor. Inevitably,though, even the Rebels of Recesshave to be hauled in like captured fugitives and returned to the grind of Math and Social Studies and all those other bogus grown-up subjects.By the time we file back into our sweltering classrooms,we're flushed, grass-stained and still tingling with adrenaline. For those brief moments before our brains are forcibly re-engaged, we're abuzz with what went down out there on the platformed refuge. Did you see when Winnie tripped on her shoelaces and went sprawling face-first? Or when Jake almost took a rogue kickball to the family jewels during the championship match? And who could forget that epic swing-off battle between Mack and Davis – definitely the stuff of future recess lore for generations to come!As the afternoons slog onward, our minds inevitably drift back to that sun-kissed playground where we reigned supreme, if only for those too-brief interludes between academic servitude. We'll retell the most legendary reccess exploits from the day under our breaths, maybe subtly practice hand-clap rhymes or make tiny chalk designs on our desktops to keep the boundless spirit of recess alive in some small way.After all, we have to bank up enough of those cherished memories and moments to last us through the infinite monotonyuntil tomorrow's recess finally comes around again. Forty precious minutes of freedom, unchaperoned adventure and ultimate kid sovereignty to keep us deliriously sane. I don't know how we'd make it through our school weeks without those tiny daily recess oasis - our fleeting playgrounds of possibility.。
药物分析专业英语

(dissolution) vessel 溶出杯(FTIR) 傅里叶变换红外光谱仪13C-NMR spectrum,13MR 碳-13核磁共振谱1ength basis 长度基准1H-NMR 氢谱2D-NMR 二维核磁共振谱:2D-NMR3D-spectrochromatogram 三维光谱-波谱图Aa stream of nitrogen 氮气流a wide temperature range 宽的温度围absolute detector response 检测器绝对响应(值)absolute entropy 绝对熵absolute error 绝对误差absolute reaction rate theory 绝对反应速率理论absolute temperature scale 绝对温标absorbance 吸光度,而不是吸收率(absorptance)。
当我们忽略反射光强时,透射率(T)与吸光度(A)满足如下关系式:A=lg(1/T)。
absorbance noise, absorbing noise 吸光度噪音。
也称光谱的稳定性,是指在确定的波长围对样品进行多次扫描,得到光谱的均方差。
吸光度噪音是体现仪器稳定性的重要指标。
将样品信号强度与吸光度噪音相比可计算出信噪比。
absorbed water 吸附水absorptance 吸收率absorptant 吸收剂absorption band 吸收带absorption cell 吸收池absorption curve 吸收光谱曲线/光吸收曲线absorption tube 吸收管abundance 丰度。
即具有某质荷比离子的数量accelerated solvent extraction(ASE) 加速溶剂萃取accelerated testing 加速试验accelerating deposition 加速破坏acceptance limit,acceptance criterion 验收限度,合格标准accidental error 随机误差accuracy 准确度。
Suppression of Spin Projection Noise in Broadband Atomic Magnetometry
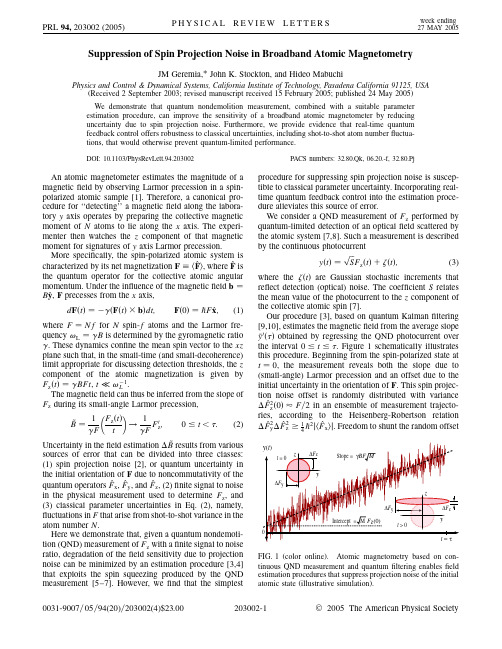
Suppression of Spin Projection Noise in Broadband Atomic MagnetometryJM Geremia,*John K.Stockton,and Hideo MabuchiPhysics and Control&Dynamical Systems,California Institute of Technology,Pasadena California91125,USA (Received2September2003;revised manuscript received15February2005;published24May2005)We demonstrate that quantum nondemolition measurement,combined with a suitable parameterestimation procedure,can improve the sensitivity of a broadband atomic magnetometer by reducinguncertainty due to spin projection noise.Furthermore,we provide evidence that real-time quantumfeedback control offers robustness to classical uncertainties,including shot-to-shot atom numberfluctua-tions,that would otherwise prevent quantum-limited performance.DOI:10.1103/PhysRevLett.94.203002PACS numbers:32.80.Qk,06.20.-f,32.80.PjAn atomic magnetometer estimates the magnitude of amagneticfield by observing Larmor precession in a spin-polarized atomic sample[1].Therefore,a canonical pro-cedure for‘‘detecting’’a magneticfield along the labora-tory y axis operates by preparing the collective magneticmoment of N atoms to lie along the x axis.The experi-menter then watches the z component of that magneticmoment for signatures of y axis Larmor precession.More specifically,the spin-polarized atomic system ischaracterized by its net magnetization F h^F i,where^F isthe quantum operator for the collective atomic angularmomentum.Under the influence of the magneticfield bB^y,F precesses from the x axis,d F t ÿ F t b dt;F 0 hF^x;(1)where F Nf for N spin-f atoms and the Larmor fre-quency!L B is determined by the gyromagnetic ratio.These dynamics confine the mean spin vector to the xzplane such that,in the small-time(and small-decoherence)limit appropriate for discussing detection thresholds,the zcomponent of the atomic magnetization is given byF z t BFt,t !ÿ1L.The magneticfield can thus be inferred from the slope ofF z during its small-angle Larmor precession,~B 1F Fztt!1FF0z;0 t< :(2)Uncertainty in thefield estimation ~B results from various sources of error that can be divided into three classes: (1)spin projection noise[2],or quantum uncertainty in the initial orientation of F due to noncommutativity of the quantum operators^F x,^F y,and^F z,(2)finite signal to noise in the physical measurement used to determine F z,and (3)classical parameter uncertainties in Eq.(2),namely,fluctuations in F that arise from shot-to-shot variance in the atom number N.Here we demonstrate that,given a quantum nondemoli-tion(QND)measurement of F z with afinite signal to noise ratio,degradation of thefield sensitivity due to projection noise can be minimized by an estimation procedure[3,4] that exploits the spin squeezing produced by the QND measurement[5–7].However,wefind that the simplest procedure for suppressing spin projection noise is suscep-tible to classical parameter uncertainty.Incorporating real-time quantum feedback control into the estimation proce-dure alleviates this source of error.We consider a QND measurement of F z performed by quantum-limited detection of an opticalfield scattered by the atomic system[7,8].Such a measurement is described by the continuous photocurrenty tSpF z t t ;(3) where the t are Gaussian stochastic increments that reflect detection(optical)noise.The coefficient S relates the mean value of the photocurrent to the z component of the collective atomic spin[7].Our procedure[3],based on quantum Kalmanfiltering [9,10],estimates the magneticfield from the average slope y0 obtained by regressing the QND photocurrent over the interval0 t .Figure1schematically illustrates this procedure.Beginning from the spin-polarized state at t 0,the measurement reveals both the slope due to (small-angle)Larmor precession and an offset due to the initial uncertainty in the orientation of F.This spin projec-tion noise offset is randomly distributed with variance ^F2z 0 F=2in an ensemble of measurement trajecto-ries,according to the Heisenberg-Robertson relation ^F2y ^F2z 14h2jh^F x ij.Freedom to shunt the random offsety(t)∆F zy∆F yzSlope = γBF M∆F zy∆F yzt= 0t> 0Intercept = M F z(0)t = τFIG.1(color online).Atomic magnetometry based on con-tinuous QND measurement and quantumfiltering enablesfield estimation procedures that suppress projection noise of the initial atomic state(illustrative simulation).F z 0 into the regression intercept rather than the slope,gained simply by performing a two-parameter fit,mini-mizes the impact of quantum uncertainty on the field estimate.Our single-shot magnetic field estimate is given by~By 0F Sp ; !ÿ1L ;(4)where y 0 is the photocurrent slope obtained by linearregression of y t over the time interval 0 t < .In principle,field uncertainty is limited only by statistical regression error [3]~B 1 F 3 2Ss ;(5)where 2 E 1 R 0t dt 2is the integrated noise vari-ance in a 1= bandwidth.The unitless QND signal to noise ratio SNR S p = (both S and 2have units propor-tional to frequency),is determined by experimental pa-rameters,such as the optical probe power and detuning,and the scattering interaction strength [7].The uncertainty of our optimal estimator,Eq.(5),should be compared to that of a procedure that cannot distinguish between Larmor precession and the initial spin projection noise.Such is the case for steady-state atomic magneto-meters [11,12]where the uncertainty~B 2 F F 2z 0 2S s (6)retains a contribution from both ^F 2z 0 F=2and theoptical shotnoise.In the limit of in finite signal to noise this expression saturates to the so-called shotnoise magneto-metry limit [11].Equation (6)corresponds to an estimation procedure that averages the photocurrent~B 2 F 2 S p Z 0y t dt (7)rather than determining its slope.It is readily shown thatsteady-state atomic magnetometers operate in a manner logically equivalent to this type of direct averaging.Our estimation procedure,which suppresses projection noise,requires precise knowledge of the QND measure-ment sensitivity F S p .Shot-to-shot variation in N produces fluctuations, F ,in the length of F that directly propagateinto the field estimation as a proportional error ~B F y0 F= FS p B F=F .A similar argument applies to S .While relative parameter uncertainties introduce es-sentially no error when B 0,they can completely mask the improved resolution provided by spin squeezing when B Þ0.To reduce the effects of classical parameter uncertainty,our magnetometer is implemented according to the closed-loop methodology [4]illustrated in Fig.2.The QND photo-current y t drives a precision y -axis magnet in negativefeedback con figuration to stabilize F z to zero [8,13].In the presence of an external magnetic field,the controller im-poses a compensating field b c t ’ÿB t ^yto prevent the atomic magnetization from precessing out of the xy plane.The magnetic field is estimated from the time-averaged feedback signal~Bÿ1ZB c t dt(8)rather than the photocurrent.Since the magnetometer al-ways operates with F z 0,the closed-loop estimation is reasonably immune to atom number fluctuations.We have recently demonstrated QND detection and real-time quantum-limited feedback control with an apparatus similar to that in Fig.2[7,13].Our spin system is provided by the 62S 1=2 F 4 ground state hyper fine manifold in 133Cs .We obtain samples with N 1010–1011atoms at a temperature of T 10 K via dark spontaneous-force optical trapping.Shot-to-shot fluctuations in N are <20%.Spin polarization along the x axis is achieved by optical pumping on the 62S 1=2 F 4 !62P 3=2 F 0 4 hyper fine transition and continuous QND measurement of F z is implemented by balanced polarimetric detection of a laser detuned from the 4!5transition by 550MHz .Background magnetic fields are continually nulled using a combination of large (1m)external three-axis Helmholtz coils and smaller computer controlled trim coils.The experiment is synchronized with respect to the 60Hz linePolarizerλ/2Computer DAQ+-Feedb ack Contro llery (t )B c (t )Feedback MagnetxyPDPDPBSyλ/2xQND P robe LaserShutterzxy Cold AtomsSignal Field Application MagnetFIG.2(color online).Schematic of our apparatus for broad-band atomic magnetometry based on continuous QND measure-ment and real-time quantum feedback control.cycle,and we estimate the resulting shot-to-shot field fluctuations in a 100 s measurement window to be 850nG .Atomic decoherence is <6%over the t 100 s measurement trajectories we consider [7].Further characterization of our state preparation,atom number,transverse spin relaxation,spin squeezing,and quantum noise limited feedback performance can be found in Ref.[13].A detailed procedure for determining the degree of atomic polarization and the QND signal to noise ratio can be found in Ref.[7].We began by operating our magnetometer with feedback disabled in order to characterize the adverse effects of classical parameter uncertainty.Figure 3shows example open-loop field estimations performed using the procedure in Eq.(4)for two different magnetic fields,B 0and B 10 G .When the QND measurement is initiated at t 0by opening the probe laser shutter [refer to Fig.2]the photocurrent establishes an average offset [inset of Fig.3(a)]that is randomly distributed in an ensemble of similar trajectories.Our ability to observe this random offset re flects suf ficient signal to noise in our QND mea-surement to produce squeezing [3,7,13].Since B 0in Fig.3(a),the atoms do not undergo Larmor precession and the slope of y t is,as expected, y0 0.As described above,statistical fluctuations due to optical noise require that this slope be obtained by regres-sion,as filtering the photocurrent reduces the stationary noise by time averaging.The single-shot estimation trajec-tory for B 0computed according to Eq.(4)is depicted by the dark solid line in Fig.3(a)while the light shadedregion denotes the single-shot field uncertainty, ~B,due to statistical error in the linear regression.Values for F and S needed to evaluate Eq.(4)were obtained from full-scale atomic Larmor precession according to the procedure de-tailed in Ref.[7].The dotted lines in Fig.3(a)indicate the ensemble fieldvariance,computed as E ~BÿB 2 1=2from 500QND tra-jectories,for the B 0field estimate.At long times,this measure of the magnetometer performance saturates to the level of shot-to-shot background magnetic field fluctua-tions in our experimental apparatus,approximately 850nG.However,prior to saturation,as depicted by theB 0curves in Fig.4,the regression estimation procedure (circles)outperforms the direct averaging estimator (tri-angles)given by Eq.(7).Unlike direct averaging,the regression estimator suppresses the uncertainty due to initial spin projection noise —the ensemble uncertainty drops below the field uncertainty threshold given by Eq.(6)[dotted line in Fig.4].It is important to note that the coherent state projection uncertainty (dotted line in Fig.4)was computed using an absolute calibration [7]of S ,and the average value of F inferred from full-amplitude Larmor precession measure-ments.Even though our optically pumped atomic system did not likely begin from a true minimum-uncertainty state due to imperfect pumping,suf ficient QND spin noise reduction was achieved to allow the magnetometer to out-perform the projection noise uncertainty corresponding to that of an actual coherent state.In contrast,the B 10 G open-loop estimation uncer-tainty fails to surpass the coherent state threshold despite a-4.0-3.0-2.0-1.00.0-20-1000102030405060Time (µs)r r u c o t o h P e n t (m )V 5-5-15020406080r r u c o t o h P e n t (m )V 1020304050600Measur eme nt Time (µs)(a)(b)B = 10 µG B = 0 µG102030405060Time (µs)1020304050600Measur eme nt Time (µs)Single Shot Estim ator Error(500 T rajector ies)(500 T rajectories)E[(B -B )2]~EnsembleUncertaintyE[(B -B )2]~Ensemble Uncertainty-4.0-3.0-2.0-1.00.0O p e n -L o o p E t s m i t a i n o E r r o r , B -B ( µG )~Ensemble UncertaintySaturation L evelSingle Shot Estim ator ErrorO p e n -L o o p E t s m i t a i n o E r r o r , B -B ( µG )~Ensemble Uncertainty Saturation L evelFIG.3(color online).Open-loop magnetic field estimation error,~BÿB ,as a function of measurement time for (a)B 0and (b)B 10 G .Inset plots show the polarimeter photocurrent for each QND measurement trajectory.The shaded regions indicate the single-shot regression uncertainty while the dotted curves re flect the ensemble error measured from 500trajectories.1.01.11.21.31.41.51.61.71.81.92.0Field Estimation T ime (µs)m e s n E b l e E s t i m a t i o n U n c e r t a i n t y ( µG )FIG.4(color online).Comparison of the two estimation pro-cedures,Eqs.(4)(circles)and (7)(triangles),with B 0and B 10 G .The dotted line re flects the theoretical sensitivity limit,Eq.(6),of a magnetometer with the same signal to noise ratio but that does not exploit spin squeezing.clearly visible photocurrent offset [inset in Fig.3(b)]sug-gesting the presence of spin squeezing.Evidently,the non-zero slope renders the open-loop estimation susceptible toclassical parameter uncertainty in F and S .As such,the long time estimation uncertainty for B 10 G saturates to a level much higher than that of the ambient magnetic field fluctuations,as in Fig.4.To alleviate the effects of classical parameter uncer-tainty,we next performed our closed-loop estimation pro-cedure by enabling the feedback loop for the entire duration of each QND trajectory.The photocurrent in Fig.5(a)displays no discernable slope despite the presence of a B ÿ300 G field as the feedback loop drives a cancellation field [Fig.5(b)]B c to maintain F z 0.The closed-loop field estimate,computed according to Eq.(8)for 0 t ,is seen to be robust to shot-to-shot parame-ter fluctuations —it is evident from Fig.5(c)that the en-semble uncertainty of the closed-loop estimator for B ÿ300 G (squares)achieves similar performance to the B 0open-loop estimation (circles).Despite the large magnitude of the estimated field,the closed-loop proce-dure is able to outperform the coherent state projection noise threshold [dotted line in Fig.5(c)].It should also be pointed out that in the closed-loop con figuration,where the estimation uncertainty is due al-most entirely to QND detection noise,the ensemble vari-ance is an overly conservative measure of the magnetometer performance.After all,ambient fluctuations that produce the 850nG sensitivity floor in Figs.4and 5(c)are real magnetic fields sensed by the atoms.Where other contributions to the detection threshold are well controlled,the single-shot estimation error [stars in Fig.5(c)]more accurately re flects the magnetometer ’s performance.This single-shot closed-loop uncertainty surpasses the coherent spin state threshold at even long times in this case prior to the onset of signi ficant atomic decoherence.These results highlight what we anticipate will become a central theme in quantum-limited metrology.Feedback enables a precision measurement to achieve optimal in-sensitivity to classical uncertainty without sacri ficing reso-lution [4,14].Furthermore,our closed-loop methodology can be immediately extended to detection of nonstationaryfields.Such an approach is likely to be essential for obtain-ing acceptable performance in various precision metrolog-ical applications including spin resonance measurements,atomic frequency standards,and matter-wave gravimetry.This work was supported by the NSF (PHY-9987541,EIA-0086038),the ONR (N00014-00-1-0479),and the Caltech MURI Center for Quantum Networks (DAAD19-00-1-0374).J.K.S.acknowledges the Hertz Foundation.We thank Ramon van Handel,Andrew Berglund,Michael Armen,Andrew Doherty,Dima Budker,and Dan Kleppner and Vladan Vuletic for helpfuldiscussions.*Electronic address:jgeremia@[1]J.Dupont-Roc,S.Haroche,and C.Cohen-Tannoudji,Phys.Lett.A28,638(1969).[2]W.Itano,J.Berquist,J.Bollinger,J.Gilligan,D.Heinzen,F.Moore,M.Raizen,and D.J.Wineland,Phys.Rev.A 47,3554(1993).[3]JM Geremia,J.K.Stockton, A.C.Doherty,and H.Mabuchi,Phys.Rev.Lett.91,250801(2003).[4]J.K.Stockton,J.M.Geremia, A.Doherty,and H.Mabuchi,Phys.Rev.A 69,32109(2004).[5] A.Kuzmich,L.Mandel,and N.P.Bigelow,Phys.Rev.Lett.85,1594(2000).[6] B.Julsgaard, A.Kozhekin,and E.S.Polzik,Nature(London)413,400(2001).[7]JM Geremia,J.K.Stockton,and H.Mabuchi,quant-ph/0501033[Phys.Rev.A (to be published)].(Note that the data presented in Ref.[7]was acquired after an overhaul of the apparatus utilized here and in Ref.[13]).[8]L.K.Thomsen,S.Mancini,and H.M.Wiseman,Phys.Rev.A 65,061801(2002).[9]V .P.Belavkin,Rep.Math.Phys.43,A405(1999).[10]H.Mabuchi,Quantum Semiclass.Opt.8,1103(1996).[11] D.Budker,W.Gawlik, D.Kimball,S.Rochester,V .Yashchuk,and A.Weiss,Rev.Mod.Phys.74,1153(2002).[12]I.K.Kominis,T.W.Kornack,J.C.Allred,and M.Romalis,Nature (London)422,596(2003).[13]JM Geremia,J.K.Stockton,and H.Mabuchi,Science304,270(2004).[14] D.W.Berry and H.M.Wiseman,Phys.Rev.A 65,043803(2002).-10-50510102030405060708090100200300400P h o t o c u r r e n t (m V )( k c a b d e e F µG )Mea surement Time (µs)0(a)(b)B = -300 µG F ield Es timat ion Time (µs)F i e l d s E t i m a t i o n U n c e r t a i t n y ( µG )FIG.5(color online).(a)Closed-loop photocurrent for a B ÿ300 G field,(b)real-time feedback field,and (c)the resulting closed-loop field estimation error ~BÿB as a function of measurement time.。
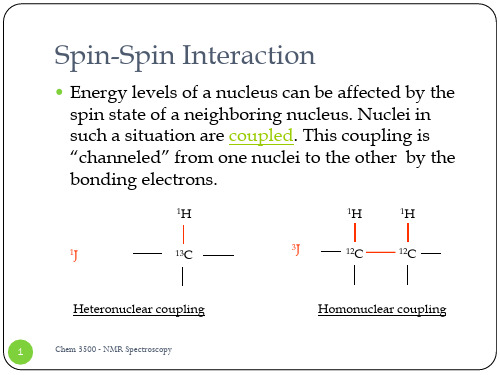
Spin-SpinInteraction
Examples of multiplets
8
Chem 3500 - NMR Spectroscopy
Strong / Weak coupling
So far, we considered that nuclei were weakly coupled:
A
X
J AX
(At least 5 times)
1H
1H
1H
1J
13C
3J
12C
12C
Heteronuclear coupling
1
Chem 3500 - NMR Spectroscopy
Homonuclear coupling
J-coupling: generalities
• nJ is the coupling constant (Hz) • n is the number of bonds between the nuclear spins It is independent from B0 • Between which nuclei can we find J coupling?
The total signal amplitude ( [nucleus] ) stays the same
JAX
JAX
A
X
Nuclei A and X without coupling
3
Chem 3500 - NMR Spectroscopy
a
x
Nuclei A and X with coupling
If this rule is not followed, then the nuclei are strongly coupled: Change in the peaks intensities Change of the number of peaks Theoretical calculations are required
2006年06月大学英语四级(CET-4)真题试卷(含答案)

8. The greatest benefit brought about by the interstate system was___________
9.Trucks using the interstate highways deliver more than__________________
10.The interstate system was renamed after Eisenhower in recognition_____________
Long-span, segmented-concrete, cable-stayed bridges such as Hale Boggs in Louisiana and the Sunshine Skyway in Florida ,and remarkable tunnels like Fort Mchenry in Maryland and Mr. baker in Washington developed under the nation's physical challenges, Traffic control systems and methods of construction developed under the interstate program soon influenced highway construction around the world, and were invaluable in improving the condition of urban streets and traffic patterns.
英美地道俚语短语
英美地道俚语短语英美地道俚语短语在英语的学习中,我们经常会接触短语,有时候还会遇到一些英美地道的俚语短语,这时候,我们却往往猜不着具体的意思。
下面是店铺整理的一些英美地道俚语短语,希望对大家有所帮助。
· for a song以级低的价钱,廉价地i got the rare edition of the book for a song in the flea market.· sound someone out试探某人的意见have you sounded the principal out on postponing the final examination?· call a spade a spade有什么就说什么we are good friends. call a spade a spade. don't tell me in a round-about way.· spick and span干干净净the housewife always keeps her kitchen spick and span.· go for a spin出去兜风the city dwellers like going for a spin to the country on weekends.· spine-chilling令人毛骨悚然he likes horrible films. those spine-chilling pictures to us are pleasant to his eyes.· the spirit is willin g; but the flesh is weak.心有余而力不足a: how many times have you tried quitting smoking? b: it's not that the spirit is not willing, but that the flesh is weak.· win one's spurs受到奖赏she won her spurs as a popular writer immediately after her first book became a best-seller.· put the squeeze on someone对某人施加压力the new situation is putting the squeeze on all companiesengaged in this business.· stand up to someone与某人大胆对抗the soldier stood up to the officer and was place in confinement.附:如何背英语单词一、“三最”狂读背单词“默默无闻”地背单词效果极其低下!一定要用“三最法”狂读狂背每个单词。
STSPIN32F0 FOC 固件示例的使用说明书
UM2152User manual Getting started with the STSPIN32F0 FOC firmware exampleSTSW-SPIN3201IntroductionThis document presents how to use the STSW-SPIN3201 firmware example. In associationwith the evaluation board STEVAL-SPIN3201, this firmware allows to control a 3-phasepermanent magnet motor with field-oriented control algorithms in sensorless operations.The STEVAL-SPIN3201 board is designed around the STSPIN32F0, a 3-phase controllerwith an integrated STM32, and implements 3-shunt resistors as current reading topology.This document does not detail the FOC and sensorless algorithms, the MC API, and theMotor Control Workbench.October 2018DocID030110 Rev 21/16Contents UM2152Contents1Acronyms and abbreviations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32STSW-SPIN3201 FW presentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.1Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.2Package content . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53System setup guide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63.1Hardware setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63.2Loading the pre-compiled firmware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63.3Building and loading firmware with different parameter configuration . . . . 73.3.1Parameter configuration with the STM32 MC workbench . . . . . . . . . . . . 83.3.2Generation of library with new parameters configuration . . . . . . . . . . . . 93.3.3Compile and download the firmware . . . . . . . . . . . . . . . . . . . . . . . . . . . 123.3.4Control the motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 4Revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152/16DocID030110 Rev 2UM2152Acronyms and abbreviations 1 Acronyms and abbreviationsTable 1. Acronyms and abbreviationsAcronym DescriptionAPI Application programming interfaceBLDC Brushless direct currentCMSIS Cortex® Microcontroller Software Interface StandardFOC Field-oriented controlFW FirmwareGUI Graphical user interfaceIDE Integrated development environmentMC Motor controlMCU Microcontroller unitPMSM Permanent magnet synchronous motorRTOS Real time operating systemSDK Software development kitDocID030110 Rev 23/164/16DocID030110 Rev 22STSW-SPIN3201 FW presentation 2.1 OverviewThe STEVAL-SPIN3201 board is a three-phase brushless DC motor driver board based onthe STSPIN32F0 and STD140N6F7 MOSFETs.The device provides an affordable and easy-to-use solution for the implementation of lowvoltage motor driving applications such as fans, drones and power tools.The board is designed for sensored or sensorless vector control - FOC algorithms with 3-shunt sensing.Figure 1. User interface STEVAL-SPIN3201In association with the evaluation board STEVAL-SPIN3201, the STSW-SPIN3201 firmwareexample allows to control a 3-phase permanent magnet motor with field-oriented controlalgorithms in sensorless operations. The STSW-SPIN3201 firmware is a customization ofthe STM32 PMSM FOC library, a part of the STM32 MCSDK (Motor Control softwaredevelopment kit) firmware (X-CUBE-MCSDK and X-CUBE-MCSDK-FUL).In this customization, the target speed is imposed through potentiometer and the motor isstarted/stopped using the USER1 button of the board. It is also possible to use the STM32Motor Control Workbench (GUI) to monitor and change in real time some of the variables ofthe algorithm and to initialize a new project according to the application needs. This GUI isnot included in the STSW-SPIN3201 package but it is distributed with the STM32 MCSDK.User1 buttonUser2 LEDRESET button Potentiometer2.2 Package contentThe STSW-SPIN3201 package is provided in the form of a zip file. Once unzipped theworking folder and the project file are available:•SDK5x - STEVAL-SPIN3201 - BullRunning.stmcx: this is the initial configuration of parameters in the STM32 Motor Control Workbench. Loading this file it is possible tomodify the parameters for the application;•SDK5x - STEVAL-SPIN3201 - BullRunning: it is the main folder of the firmware. This directory, as shown in Figure2, is organized in subfolders which contain;Figure 2. Main folder structure•Binary: a compiled version of the firmware as configured by the initial SDK5x - STEVAL-SPIN3201 - BullRunning.stmcx. In this configuration the STEVAL-SPIN3201 board isassociated to the Bull-Running BR2804-1700 kV motor;•Drivers: the HAL driver library and the CMSIS files from ARM®;•EWARM: this is the working folder when using IAR IDE;•Inc: application includes files;•MCSDK_v5.2.0: the files for FOC library (revision 5.2);•Src: application source files.The SDK5x - STEVAL-SPIN3201 - BullRunning.ioc is a project file used by theSTM32CubeMX to generate the code.Note:IMPORTANT: do not use the STM32CubeMX project file to change configurations related to the STM32 PMSM FOC library (timers, DMA, interrupts, etc.). All thechanges must be done through the STM32 Motor Control Workbench only.DocID030110 Rev 25/16System setup guide UM21526/16DocID030110 Rev 23System setup guide 3.1 Hardware setupTo use the firmware example in its default configuration, it is required to have:•One STEVAL-SPIN3201 board;•One Bull-Running BR2804-1700 kV brushless motor. A different motor can be used varying the respective settings via the MC Workbench (see Section 3.3.1 on page 8). Inthis case the firmware must be rebuilt (see Section 3.3.2 on page 9);• A 12 V DC power supply. In any case the board supports a power range between 8 V and 45 V. If the supply voltage is changed, this new setting must be applied to the FOClibrary via the MC Workbench (see Section 3.3.1 on page 8). In this case the firmwaremust be rebuilt (see Section 3.3.2 on page 9);•A USB cable with a mini-B connector.Figure 3. STEVAL-SPIN3201 board 3.2 Loading the pre-compiled firmwareOnce the hardware setup is ready, it is necessary to load the board with firmware.The easiest way to load a new firmware into the device is to copy the binary file into themass storage interface provided by the ST-LINK, for example to drag and drop it into thedisk. The default binary from the SDK5x - STEVAL-SPIN3201 - BullRunning\Binary foldercan be loaded using the process described below:•First time only: install the STLINK V2-1 drivers that can be downloaded from the ST website (STSW-LINK009)•Connect the evaluation board to a PC with the USB cableDocID030110 Rev 27/16UM2152System setup guide•Supply the evaluation board through the Vin connector (J2) with a DC voltage within the operative range (8 V - 45 V)• A new drive named “SPIN32F0” should appear in the list of removable storages•Delete all the files on this drive (for example “DETAILS.TXT” file). This step is not mandatory but it is recommended when the binary size is close to the 32 Kbytes maximumlimit of the STSPIN32F0 (this is the case of the example binaries). Otherwise, thefirmware loading can fail.•Copy the binary file into the root of the drive. The red/green LED of the ST-LINK starts blinking. Then refresh your file explorer: if the binary file has disappeared and no error logfile has been generated, the binary file has been successfully loaded.•Reset the board to start the loaded firmware.3.3 Building and loading firmware with a different parametersconfigurationIt is possible to develop the firmware via one of the supported different IDEs:•µVision of the ARM Keil Microcontroller Development Kit (MDK-ARM) toolchain;•IAR embedded workbench for the ARM (EWARM) toolchain which is provided by IAR Systems ®;•System workbench for the STM32, a GCC toolchain based on Eclipse and provided by AC6;•Atollic TrueSTUDIO for STM32, a development and debugging IDE for STM32 MCU developers.Note:The firmware must be rebuilt every time the configuration files of the FOC library arechanged as, for example, the characteristics of the target motor or the supply voltage of theapplication is changed.STSW-SPIN3201 is a customization of the STM32 PMSM FOC library, where the STEVAL-SPIN3201 board is associated to the Bull-Running BR2804-1700 kV motor.The customization consists of the introduction of some functions that permit the use of thestart/stop button in the STEVAL-SPIN3201, the use of the potentiometer and the Fault Acknowledgement:These functions can be found in the main.c file and are included between comment pairsUSER CODE BEGIN and USER CODE END. This portion of the file is not overwritten bySTM32CubeMX when it generates the code./* USER CODE BEGIN PFP *//* Private function prototypes -----------------------------#if defined (ENABLE_START_STOP_BUTTON)void StartStoButtonGPIOInit (void)#endifvoid FaultLEDInit (void)void PotentiometerInit (void)void PotentiometerHandleSpeed (void)int16_t PotentiometerGetAverageSpeed (int16_t adcconv);/* USER CODE END PFP */System setup guide UM21528/16DocID030110 Rev 2Also the external interrupt handler in file stm32f0xx_mc_it.c has been changed.Also in this part of the code, the modifications are included between comment pairs USERCODE BEGIN and USER CODE END.If the user wants to use the features available in STSW-SPIN01 in a different application, aconfiguration of parameters is needed. The STM32 MC Workbench permits to create a newlibrary with different parameters.3.3.1 Parameter configuration with the STM32 MC workbenchThe STM32 MC Workbench can be used to set the parameters of the FOC librarydepending on your motor and application.As long as the STEVAL-SPIN3201 is used, the MC Workbench project file can be used as astarting point: "SDK5x - STEVAL-SPIN3201 - BullRunning.stmcx". When the project isopened by the ST MC Workbench, a configuration window appears (Figure 4). Starting fromthe default parameters, there are 4 main families of parameters to be changed to best fit theapplication:Figure 4. ST motor control workbench: configuration windowvoid EXIIO_1_IRQHandler (void){/* USER CODE BEGIN START_STOP_BTN */LL_EXTI_C1earFlag_0_31 (LL_EXTI_LINE_0) ;#define CLEAR_ERROR_WIIH_SIART_STOP_BUTTONMC_AcknowledgeFaultMotor1 () ;UI_HandleStartStopButton_cb () ;/* USER CODE END START_STOP_BTN */}/* USER CODE BEGIN 1 */#if defined (ENABIE_START_STOP_BUTTON) &&!defined (CLEAR_ERROR_WITH_START_STOP_BUTTON)#warning "See following comments regarding start/stop button handling"/* If a fault occured, the function UI_HandleStartStopButton_cb does not startthe motor. To prevent this, it is recommended to acknovledge first the faultby adding the two following lines in EXTI0_1_IRQHandler:#define CLEAR_ERROR_WITH_START_STOP_BUTTONMC_AcknovledgeFaultMotor1 () ;just after line LL_EXTI_ClearF1ag_0_31 (LL_EXTI_LINE_0);*/#endifDocID030110 Rev 29/16UM2152System setup guide•Motor Section: If a different motor is used, the respective parameters must be updated. If motor parameters are not correct, it may be useful to change gain parameters. For thispurpose, see the documentation of MCSDK available on .•Power Stage Section: They must be changed only if the hardware of the board is modifiedchanging the MOSFETs, adjusting the gain of the sensing circuitry, etc…•Drive Management Section: They must be used to choose the correct configuration of the algorithm. For example, the start-up configuration of the algorithm, the control modechosen (Speed or Torque) and also the gain parameters if needed.•Control Stage Section: Set the mapping of the STM32 peripherals which should not be changed as long as the STEVAL-SPIN3201 board is used.For more details about the use of the STM32 MC Workbench refer to the UM2168 and thedocumentation that you can find for X-CUBE-MCSDK available on .3.3.2 Generation of library with new parameters configurationTo generate a library with new parameters maintaining the customized code of STSW-SPN01, follow the procedure:•Open ST Motor Control Workbench and load the project "SDK5x - STEVAL-SPIN3201 - BullRunning.stmcx" contained in the zip file.•Change the parameters as needed by your application (as shown in Section 3.3.1) and save the new project with a different name (e.g. "SDK5x - STEVAL-SPIN3201 -YourMotor.stmcx"). This is the configuration file of parameters used in the STM32 MotorControl Workbench. When the user changes the parameters of the application, this filechanges accordingly.•Create a new folder with the same name of the project file (in the example, the new folder is "SDK5x - STEVAL-SPIN3201 - YourMotor"). You have created the new workingenvironment for your application.Figure 5. Working environment•Copy the "Inc" and "Src" folders from the original directory "SDK5x - STEVAL-SPIN3201 - BullRunning" into the new folder "SDK5x - STEVAL-SPIN3201 - YourMotor".Theapplication main folder "SDK5x - STEVAL-SPIN3201 - YourMotor", has two subfolders.•Click on generation button to generate the new code as shown in Figure 6.System setup guide UM215210/16DocID030110 Rev 2Figure 6. Generation button A generation window appears as shown in Figure 7.Figure 7. Generation windowIn the generation window choose:•STM32CubeMx should be the latest version;•Choose your favorite Target Toolchain in the Target Toolchain menu (Figure 8);DocID030110 Rev 211/16UM2152System setup guideFigure 8. Target toolchain menu •Choose HAL-Hardware Abstraction Layer in Driver Selection; •Click on Generate.The STM32 Motor Control Workbench generates, in the application main folder, the newSTM32CubeMx Project file and the new code for your application. The application mainfolder "SDK5x - STEVAL-SPIN3201 - YourMotor", has these subfolders: Figure 9. After the code generationSystem setup guide UM215212/16DocID030110 Rev 2The STM32 MC Workbench has updated the original code contained in the directories "Inc"and "Src" with the application parameters and now, in the folder "SDK5x - STEVAL-SPIN3201 - YourMotor", the new configuration is ready to be used by your favorite IDE.Note:The directory EWARM is generated when choosing IAR EWARM in the Target Toolchainmenu.3.3.3 Compile and download the firmwareAfter the generation of the application code, the library is ready to be compiled anddownloaded. To build and load STSW-SPIN3201 with the new configuration of parameters,follow the steps:•Supply the board correctly and connect it to the PC through the USB cable;•Connect the motor;•Run your favorite IDE;•Load the project with your favorite IDE from the releted directory created by the STM32 MC Workbench (for example "EWARM\Project.eww" if you are using IAR embeddedworkbench for the ARM toolchain);•Compile and download the code;•Start the execution of the code.3.3.4 Control the motorThe user can now control the motor using the features available on STSW-SPIN3201. Theycan push the start/stop button ("USER1" button) to make the motor spin. They can also usepotentiometer (R6) to dynamically adjust motor speed. If an error occurs while the motor isrunning, the LED of the "USER2" key is turned on and the motor stops. Pushing the"USER1" button again clears the failure.Alternatively the user can also control the motor through the STM32 MC Workbench:•Open STM32 MC Workbench;•Click on the "Open Monitor" button:to open the ‘monitor and spin control GUI’ (Figure 10);UM2152System setup guideFigure 10. Monitor and spin control GUI•Connect the board by clicking the connection button:to make this operation work;•Remember to use the correct Port number: you can find the correct COM number in the•Use Baudrate 9600 if you are using the original setting of this parameter. It isrecommended to use the minimum value of baudrate, because a higher value couldreflect on the functionality of the environment. If you have changed this parameter usingthe STM32 MC Workbench, report in the ‘Monitor and Spin control GUI’ the same value•Once the board is connected, use the control panel on the right of the control GUI:DocID030110 Rev 213/16System setup guide UM215214/16DocID030110 Rev 2Figure 11. Control panel •Using the STM32 MC Workbench it is also possible to monitor the speed and change the variables of the algorithm in real time. The "Advanced" and "Registers" tabs can be usedto dynamically adjust the parameters of the FOC algorithm.If an error occurs, the respective LED on the left side is turned on. No operation is alloweduntil the failure is cleared using the "Fault Ack" button.For details of the use of the STM32 Motor Control Workbench v5, see also UM2374 andUM2380 available on .UM2152Revision history 4 Revision historyTable 2. Document revision historyDate Revision Changes05-Dec-20161Initial release.22-Oct-20182Update to Revision 5.2.0 of STM32 Motor Control SDKDocID030110 Rev 215/16UM2152IMPORTANT NOTICE – PLEASE READ CAREFULLYSTMicroelectronics NV and its subsidiaries (“ST”) reserve the right to make changes, corrections, enhancements, modifications, and improvements to ST products and/or to this document at any time without notice. Purchasers should obtain the latest relevant information on ST products before placing orders. ST products are sold pursuant to ST’s terms and conditions of sale in place at the time of order acknowledgement.Purchasers are solely responsible for the choice, selection, and use of ST products and ST assumes no liability for application assistance or the design of Purchasers’ products.No license, express or implied, to any intellectual property right is granted by ST herein.Resale of ST products with provisions different from the information set forth herein shall void any warranty granted by ST for such product. ST and the ST logo are trademarks of ST. All other product or service names are the property of their respective owners.Information in this document supersedes and replaces information previously supplied in any prior versions of this document.© 2018 STMicroelectronics – All rights reserved16/16DocID030110 Rev 2。
石墨烯(graphene)中的几个基本物理问题
周光辉
湖南师范大学物理与信息科学学院 Electronic address: ghzhou@ 合作者: 丁开和博士、 程 芳博士 (长沙理工大学) 廖文虎博士(吉首大学) 付 喜博士(湖南科技学院) 周本胡、谌雄文、王海艳(博士生) 王书恒、郭雄杰 (硕士生)
Wenhu Liao, Guanghui Zhou and Fu Xi, J. Appl. Phys. 104, 126105 (2008)
介电函数为:
Fig.1: Band structure for one-dimensional-confined graphene
3 2 1 0 1 2 3
a
III. 石墨烯纳米带电光磁性质及应力调控 How to open and manipulate (gap ( engineering ) a gap?
1. Quantum confinement: Nanoribbon or nanostripe; 2. Disorder: lattice defects, impurities, chemical doping, etc; 3. Edge chemical modifications; 4. External field, static E B field, electromagnetic field (optical properties); 5. Mechanically, substrate or intentional applied strain, stress, deformation, etc.
Εn,kx
0.2 0.1 0 0.1 0.2 kx a
Fig.1(a) : 173-AGNR金属型, 导带和价带关于费米能EF =0镜 像对称,导带在kx=0点自下而上 分别为n=0,1,2,3,4,5,6…13.
Spin-stabilized projectile
专利名称:Spin-stabilized projectile发明人:GLOTZ, GERHARD, DR.,PELLER, HELMUT,DR.,THEIS, ULRICH, DR.,SCHILLING,HARTMUT, DR.申请号:EP88112773.2申请日:19880805公开号:EP0322505A2公开日:19890705专利内容由知识产权出版社提供专利附图:摘要:The invention relates to a spin-stabilised projectile (10), the LD ratio of which is > 5. In known projectiles of this type, stability problems easily arise as a result of the relatively long distance between the centre of gravity and thrust point of the projectile(10). To prevent this, it is proposed that tail-unit fins (12, 13, 14) be arranged on the rear region (11) of the projectile (10). These tail-unit fins (12, 13, 14) have an angle of incidence (@) relative to the longitudinal axis (16) of the projectile which is selected so that the spin reduction of the projectile (10) during flight corresponds approximately to the spin reduction of a comparable projectile without fins. This measure ensures that the thrust point (air engagement point) is nearer to the centre of gravity of the projectile and the disturbing tilting moment becomes less in relation to known projectiles.申请人:RHEINMETALL GMBH地址:Pempelfurtstrasse 1 40880 Ratingen DE 国籍:DE代理机构:Podszus, Burghart, Dipl.-Phys.更多信息请下载全文后查看。
自旋翻转-spin crossover
LS, S = 1/2
HS, S = 5/2
1931 – Cambi and Szego observed
SCO in Fe(III) dithiocarbomates
Pauling initially explained their
results by the change in the bond type from covalent to ionic correct explanation based on the change in the spin state of the ion
Tanabe-Sugano Diagrams
d2 Ion d3 Ion
Tanabe-Sugano Diagrams
d5 Ion d6 Ion
The History of SCO Phenomenon
Observed for d4, d5, d6, d7 metal ions These ions exhibit two possible
electron configurations in the octahedral ligand field
Example – d5 ion
eg t2g eg t2g
Switching between the states is
achieved by changing temperature, pressure, or by photoexcitation
Splitting of d-Orbitals by the Ligand Field
Octahedral symmetry
eg 10Dq t2g
Mn+,
d
Spectrochemical series of ligand-field strength:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ψ∓
(3)
In the nonrelativistic approximation (potential energies small compared to mc2 and E ≃ mc2 ) Eq. (1) becomes the Schr¨ odinger equation with binding energy equal to E − mc2 and a potential 1
Luis B. Castro1 and Antonio S. de Castro2 UNESP - Campus de Guaratinguet´ a Departamento de F´ ısica e Qu´ ımica 12516-410 Guaratinguet´ a SP - Brasil
2
φ = (E − Vv )2 φ
(1)
where the prime denotes differentiation with respect to x, E is the energy of the particle, c is the velocity of light and h ¯ is the Planck constant. The subscripts for the terms of potential denote their properties under a Lorentz transformation: v for the time component of the 2vector potential and s for the scalar term. In the presence of time-independent vector and scalar potentials the 1+1 dimensional time-independent Dirac equation for a fermion of rest mass m reads cαp + β mc2 + Vs + Vv ψ = Eψ (2)
given by Vv + Vs , so that φ obeys the Schr¨ odinger equation without distinguishing the contributions of vector and scalar potentials. In this approximation Eq. (3) becomes ψ− = p/(2mc)ψ+ , and because of this ψ+ obeys the same equations as φ while ψ− is of order v/c << 1 relative to ψ+ . It is remarkable that the KG and the Dirac equations with a scalar potential, or a vector potential contaminated with some scalar coupling, is not invariant under the simultaneous changes V → V +const. and E → E +const., this is so because only the vector potential couples to the charge, whereas the scalar potential couples to the mass of the particle. Therefore, if there is any scalar coupling the energy itself has physical significance and not just the energy difference. It is well known that a confining potential in the nonrelativistic approach is not confining in the relativistic approach when it is considered as a Lorentz vector. It is surprising that relativistic confining potentials may result in nonconfinement in the nonrelativistic approach, simply because there is pair creation and the single-particle picture no long holds. This last phenomenon is a consequence of the fact that vector and scalar potentials couple differently in the KG and in the Dirac equations whereas there is no such distinction among them in the Schr¨ odinger equation. This observation permit us to conclude that even a “repulsive” potential can be a confining potential. The case Vv = −Vs presents bounded solutions in the relativistic approach, although it reduces to the free-particle problem in the nonrelativistic limit. The attractive vector potential for a particle is, of course, repulsive for its corresponding antiparticle, and vice versa. However, the attractive (repulsive) scalar potential for particles is also attractive (repulsive) for antiparticles. For Vv = Vs and an attractive vector potential for particles, the scalar potential is counterbalanced by the vector potential for antiparticles as long as the scalar potential is attractive and the vector potential is repulsive. As a consequence there is no bounded solution for antiparticles. For Vv = 0 and a pure scalar attractive potential, one finds energy levels for particles and antiparticles arranged symmetrically about E = 0. For Vv = −Vs and a repulsive vector potential for particles, the scalar and the vector potentials are attractive for antiparticles but their effects are counterbalanced for particles. Thus, recurring to this simple standpoint one can anticipate in the mind that there is no bound-state solution for particles in this last case of mixing. Regarding the structure of the wavefunctions under the simultaneous changes Vv → −Vv and E → −E , from the charge-conjugation operation one can see that if ψ is a solution with energy E for the potential Vv then σ1 ψ ∗ is also a solution with ∗ energy −E for the potential −Vv . Thus, one has (ψ± )c = ψ∓ and that means that the upper and lower components of the Dirac spinor have their roles changed. As for the KG wavefunction, its nodal structure is trivially preserved in such a way that particle and antiparticle can be distinguished only by the eigenenergies. Supposing that the vector and scalar potentials are constrained by the relation Vv − Vs = V0 , where V0 is a constant, and defining ε = E − V0 , the KG equation can be written as h ¯ 2 ′′ φ + Veff φ = Eeff φ (5) 2m On the other hand, for ε = −mc2 the same Sturm-Liouville equation for φ is obeyed by ψ+ ′ whereas ψ− = −ih ¯ cψ+ / (ε + mc2 ) . Otherwise, for ε = −mc2 , it might be possible the existence − Eeff ε2 − m2 c4 = , 2mc2 Veff ε + mc2 = Vs mc2 (4)