水下地形测量操作
实验六水下地形测量
实验六 水下地形测量江河湖海水面以下常呈现复杂的地形。
为了研究河床、海岸的演变,确定河道整治方案,修建闸坝等水工建筑物,要有水下地形资料。
水下地形用等高线表示,除施测方法与陆地上有差异外,施测原理基本相同。
水下地形测量是利用船艇在水面上探测河道地形的一种方法,包括水位观测、测深和定位等内容。
水下地形测量与陆地地形测量一样,首先确定点的平面位置(称定位),再确定点的高程。
定位测量可采用经纬仪,六分仪进行;高程即测深可用回声测深仪,超声波测深仪,测深杆,测深锤等进行。
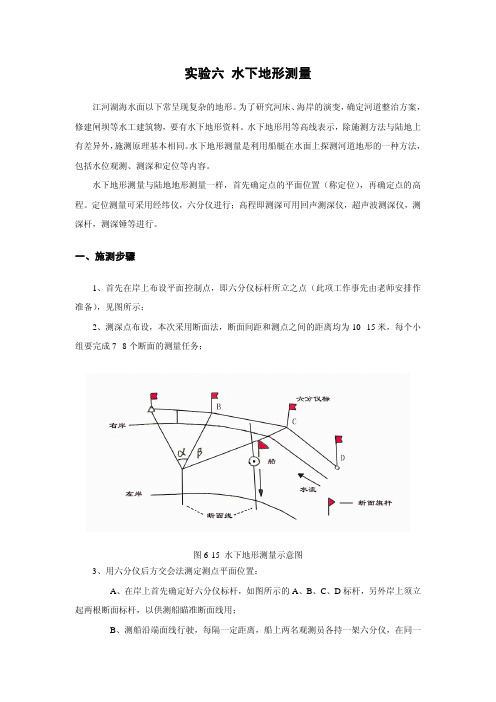
一、施测步骤1、首先在岸上布设平面控制点,即六分仪标杆所立之点(此项工作事先由老师安排作准备),见图所示;2、测深点布设,本次采用断面法,断面间距和测点之间的距离均为10--15米,每个小组要完成7--8个断面的测量任务;图6-15 水下地形测量示意图3、用六分仪后方交会法测定测点平面位置:A、在岸上首先确定好六分仪标杆,如图所示的A、B、C、D标杆,另外岸上须立起两根断面标杆,以供测船瞄准断面线用;B、测船沿端面线行驶,每隔一定距离,船上两名观测员各持一架六分仪,在同一位置分别测出角和角(如图所示),负责测深者也同时测出该点的水深,记录者根据点次依次记下观测角和测点水深,照此办法测完每个断面为止;C、要求各测点对两个六分仪标杆之间的夹角和大于20、小于130,以便测点位置交会准确;D、需要注意的是,角和角一定是六分仪标杆之间的夹角,这样才能在图纸上定出测点的位置;4、水深及水位测量:水深用测深锤测量;水位按假定水位,这里假定水位为30米;测点高程=水位-水深5、业内及成果整理:A 、整理测量记录,算出测点高程;B、利用三臂分度规将各测点高程展绘在图纸上;C、勾绘等高线,绘出水下地形图。
图6-16 某河段水下地形图二、要求用手持式激光测距仪进行定位,用便携式超声波测深仪量测水深,然后用三臂分度规将所测的点的平面位置绘在图纸上,并标上相应点的高程,据此勾绘出等高线,即水下地形图。
工程施工水下地形测量方案

工程施工水下地形测量方案一、引言水下地形测量是目前工程施工中非常重要的一项工作,通过测量水下地形,可以为工程施工提供准确的地形数据,为后续工程施工及设备安装提供重要的参考。
本方案着重介绍了在水下进行地形测量的方法和技术,以及实施本方案的步骤和流程。
二、水下地形测量方法和技术1. 水下地形测量方法水下地形测量方法主要有激光测距法、声纳测距法、光纤测距法和测量航测法等。
激光测距法是利用激光发射器和接收器进行测距测量,通常适用于测量较近距离地形。
声纳测距法是利用声波在水中传播进行间接测距,通常适用于较深水域地形测量。
光纤测距法是利用光纤传感器进行地形测量,可以实现连续测量和较高精度。
测量航测法是通过航空或水下无人机进行地形测量,适用于大范围、复杂地形的测量。
2. 水下地形测量技术水下地形测量技术包括多波束声纳测距技术、多普勒测速技术、数字图像处理技术和地形数据建模技术等。
多波束声纳测距技术是通过多个声纳传感器进行地形测量,可以实现对水下地形的快速高精度测量。
多普勒测速技术是利用多普勒效应进行水下水流速度测量,为后续工程施工提供实时水流速度数据。
数字图像处理技术是通过水下相机进行图像采集和处理,可以实现对水下地形的高分辨率图像测量。
地形数据建模技术是根据测量数据进行地形建模,为后续工程施工提供地形模型数据。
三、水下地形测量方案实施步骤和流程1. 前期准备在进行水下地形测量前,需要对测量区域进行调查,了解水下地形特点和环境条件,确定测量方案和技术。
同时需要准备好测量设备和工具,包括声纳传感器、激光发射器和接收器、光纤传感器、水下相机、测量航测无人机等。
2. 测量计划编制根据水下地形特点和测量要求,编制详细的测量计划,确定测量区域范围和测量方式,制定测量路线和测量点位置,确定测量参数和精度要求。
同时需要进行风险评估和安全考虑,确保测量过程的安全和数据的准确性。
3. 测量操作实施根据测量计划,组织测量人员和设备,进行水下地形测量操作。
海底地形测量的关键技术与方法
海底地形测量的关键技术与方法海底地形测量是一项对海洋科学和海洋工程领域至关重要的任务。
准确测量海底地形的关键技术和方法无疑对于海洋研究和资源开发具有重要意义。
本文将探讨几种重要的海底地形测量技术和方法。
1.声纳测深技术声纳测深技术是最常用的海底地形测量技术之一。
它利用声纳波束在水下传播的原理来获得海底地形的信息。
测深仪通过发送声波信号,根据声波信号的往返时间来计算海底的深度。
这种技术不仅可以精确测量海底的深度,还可以获取地形特征如海底峡谷、山脉等的描述。
声纳测深技术的主要优点是非侵入性,且适用于大范围的海域。
然而,由于声波的传播速度受到多种因素的影响,如水温、盐度和压力等,因此在进行声纳测深时需要进行校正和补偿。
2.多波束测深技术多波束测深技术是声纳测深技术的一种改进方法。
该技术利用多个声波发射器和接收器,并通过计算声波波束的散射点来推断海底地形。
相比传统的单波束测深技术,多波束测深技术能够提供更加精确和详细的海底地形信息。
多波束测深技术的应用领域广泛,包括海洋测绘、海底管道敷设和海底地质研究等。
然而,在复杂的海底地形条件下,多波束测深技术的应用可能存在一定的局限性。
3.定位技术准确的位置信息对于海底地形测量也是至关重要的。
全球定位系统(GPS)和LORAN(低频无线导航系统)是两种常用的海底定位技术。
GPS通过卫星定位技术精确测量探测器的位置,从而提供准确的海底地形测量数据。
而LORAN则利用地面和海底基站之间的时间延迟来确定探测器的位置。
这些定位技术可以与声纳测深技术结合使用,以提供更加准确和可靠的海底地形数据。
4.激光扫描技术激光扫描技术是一种近年来得到广泛应用的海底地形测量技术。
这种技术利用激光束测量海底地形的高程信息。
激光扫描技术具有高精度、高分辨率和高效率的特点,可以获取精确的海底地形数据。
通过激光扫描技术,可以获取海底地形的地形线图和三维模型,为海洋研究和工程提供重要参考。
然而,激光扫描技术在应用中需要考虑光线在海水中的传播和散射问题,因此在复杂的海底环境中可能存在一定的挑战。
测绘技术中的水下地形测量技术方法
测绘技术中的水下地形测量技术方法近年来,随着科学技术的不断发展,水下地形测量技术在测绘领域中扮演着愈加重要的角色。
水下地形测量技术具有广泛的应用领域,如海洋工程、河流治理、水利建设等。
本文将介绍几种常见的水下地形测量技术方法,以探索其原理、特点及应用范围。
首先,我们来了解一种常见的水下地形测量技术——声纳测深法。
声纳测深法利用声波在水中传播的原理,通过发射声波并记录回波的时间和信号强度来计算目标水下地形的深度。
由于声波的传播速度在水中是已知的,因此可以根据回波的时间确定目标地形的深度。
这种方法适用于测量深海、湖泊等特殊环境下的地形,并且具有测量范围广、精度高的优点。
它被广泛应用于海洋资源勘测、海底地质调查等领域。
其次,我们来介绍另一种常用的水下地形测量技术——激光测距法。
激光测距法利用激光器发射激光束,并通过接收器记录返回的光信号,从而确定目标地形的距离。
这种方法适合于近距离测量,并且具有高精度和快速测量的特点。
激光测距法广泛应用于水利工程、城市建设等领域,如测量河床的高程、建筑物的结构等。
然而,由于激光光束在水中传播时会发生衰减,因此在水下环境中应用时需要考虑光线的衍射和散射,以提高测量精度。
此外,水下地形测量技术中还存在一种常用方法——多波束测深法。
多波束测深法通过同时发送多个声波束,并记录回波的时间和强度,以确定目标地形的深度和形态。
多波束测深法相比于传统的声纳测深法有着更高的测量精度和分辨率。
该方法广泛应用于海洋测图、河流边界划定等领域。
同时,该方法还可以获取地形的三维数据,为后续的地形分析和建模提供了重要数据支持。
除了这些常见的水下地形测量技术方法,还有一些新兴的技术正在被应用于水下地形测量领域。
例如,无人机测量技术的发展为水下地形测量带来了新的机遇。
无人机可以携带各种传感器设备,在空中进行水下地形测量,无需直接接触水体。
这种方式不仅能够提高测量的安全性和效率,还能够获取更广阔的测量区域。
如何进行水下地形测量与地图制作

如何进行水下地形测量与地图制作水下地形测量和地图制作是一个非常重要的领域,它不仅在海洋科学和环境保护方面具有重要意义,同时也在海洋资源勘探、海上交通规划以及海洋工程施工等方面扮演着不可或缺的角色。
本文将探讨如何进行水下地形测量与地图制作的相关技术和方法。
一、水下地形测量技术简介水下地形测量是指利用各种测量设备对水下地貌特征进行详细测量和记录的过程。
常用的水下地形测量技术包括声纳测深仪、多波束测深、浮标测高仪和激光扫描测深等。
1. 声纳测深仪:声纳测深仪通过发送声波信号并接收其回波,利用声速和时间差来计算出水下地形的深度。
它广泛应用于海洋科考、水下考古和海洋资源调查等领域。
2. 多波束测深:多波束测深是一种通过同时发射多个声波束进行测量的技术,可以提高测量精度和效率。
通过分析多个回波的特征,可以获取更为精确的水下地形信息。
3. 浮标测高仪:浮标测高仪是一种通过记录海面到测高仪浮标位置的距离来计算水下地形高度的方法。
它适用于近海和河流等较浅的水域,能够提供详细的地形高程信息。
4. 激光扫描测深:激光扫描测深利用激光束穿透水体并被水下对象反射回来进行测量,可以获取高精度的水下地形数据。
它在水下地形测量和海底地貌研究中具有重要应用价值。
二、水下地图制作方法探讨水下地图制作是基于水下地形测量数据的基础上,利用地图制作软件对水下地貌进行细致的描绘和展示的过程。
在水下地图制作中,需要考虑数据处理、地图样式设计和精度验证等环节。
1. 数据处理:水下地形测量数据通常为海底地形数据和水下物体数据。
在进行水下地图制作前,需要对这些数据进行处理和清洗,包括数据校正、滤波处理和异常值剔除等。
这样可以提高地图的准确性和可读性。
2. 地图样式设计:水下地图的样式设计需要考虑可视化效果和信息传递的需要。
可以通过不同颜色和线条的运用来表示不同的地貌特征,同时添加图例和比例尺等元素,使地图更具有可读性和美观性。
3. 精度验证:在完成水下地图制作后,需要进行精度验证以确保地图的准确性和可靠性。
使用无人船进行水下地形测绘的步骤和技巧

使用无人船进行水下地形测绘的步骤和技巧概述水下地形测绘是一项重要的任务,用于获取水下地形的形状和特征。
无人船技术的发展使得水下地形测绘不再受到人力和物力的限制,大大提高了效率和准确性。
本文将探讨使用无人船进行水下地形测绘的步骤和技巧。
1. 确定测绘区域在开始水下地形测绘之前,首先需要确定测绘的区域。
根据实际需求和目标,选择合适的水域范围进行测绘。
此外,还需要考虑测绘的深度范围和水下环境的复杂程度,以确定使用的无人船和传感器的性能要求。
2. 选择适当的无人船和传感器根据测绘任务的需求,选择适当的无人船和传感器非常重要。
不同的无人船和传感器具有不同的特点和适用范围。
例如,对于浅水区域的测绘,可以选择悬挂式无人船,它可以携带多种传感器进行测量。
而在深水区域,可以选择自主式无人船,它具有较好的稳定性和控制性能。
传感器的选择也是关键因素。
常用的水下地形测绘传感器包括声纳、多波束声纳、激光扫描仪等。
根据所需的精度和分辨率,选择适当的传感器进行数据采集。
3. 制定测绘计划在开始测绘之前,需要制定详细的测绘计划。
首先要确定测绘的目标和需要获取的地形数据类型。
然后,根据测绘区域的大小和深度,确定航线和采样点的分布。
此外,还需要考虑船体的移动速度、控制点的设置以及数据的处理和存储方式。
4. 进行测绘操作在开始测绘之前,需要进行必要的准备工作。
保证无人船的各项设备正常运行,检查传感器的校准情况,并确保无人船与地面控制站的通信畅通。
开始测绘后,无人船根据预定的航线进行巡航,同时激活传感器进行数据采集。
可以根据需要调整航线和采样点的分布,以确保获取到足够的数据覆盖目标区域。
5. 数据处理和分析完成测绘任务后,需要对获取的数据进行处理和分析。
首先,将采集到的原始数据进行预处理,包括去噪、滤波和校正等操作。
然后,使用专业的软件对数据进行处理,生成水下地形的三维模型和地形图。
在数据分析过程中,可以使用现有的水下地形分析方法,如地形剖面分析、水深图绘制、地形变化监测等。
内陆水域水下地形测量技术规程
内陆水域水下地形测量技术规程一、内陆水域水下地形测量技术规程简介内陆水域水下地形测量技术规程旨在确保内陆水域水下地形测量工作的准确性,同时也旨在提高测量作业处理的效率。
本规程强调对应用技术的质量控制,其目的是提高测量的精确性,减少出错的可能性,并为测量过程中可能出现的问题提供解决方案。
内陆水域水下地形测量技术规程包括:船舶选择与航测设备、航测仪器安装及校准、测量路线设计、水下地形测量操作、航测数据处理、水下地形处理、水下地形数据管理等方面。
二、船舶选择与航测设备1、船舶选择内陆水域水下地形测量工作所需的船舶应符合以下要求:(1)船舶体型应小巧便捷,且性能可靠,具备良好的操纵性;(2)船身下仰角应小,且有足够的载荷能力,以便携带测量设备;(3)船舶的稳定性应足够,能够满足测量要求;(4)船舶的机动性应足够,以便在测量过程中能够快速转向。
2、航测设备内陆水域水下地形测量工作所需的航测设备应有:(1)潮汐计:用于记录海水深度及潮位变化;(2)水下声纳:用于记录周围水体的深度及地形;(3)水下摄影机:用于记录水下地形的照片;(4)海底网:用于记录水下地形的细节;(5)GPS:用于测量船舶的位置及航向。
三、航测仪器安装及校准1、安装在船舶安装航测仪器之前,必须先将其安装在一个固定平台上,以确保其安装的准确性。
在安装过程中,应注意安装仪器的振动,以免影响测量精度。
2、校准在安装完成后,应对各个仪器进行校准,以确保其准确性。
校准的方法主要有两种:一种是采用计算机软件进行校准,另一种是采用物理方法进行校准,例如使用水下模拟器对仪器进行校准。
四、测量路线设计测量路线的设计应考虑水域的特点、仪器的性能、船舶的性能及安全等多项因素。
具体而言,应在测量路线设计中考虑以下几个方面:(1)船舶选择:按照测量任务,选择合适的船舶;(2)航测仪器:根据测量任务,选择合适的航测仪器;(3)测量路线:根据测量任务,为船舶设置合适的测量路线,以便获取原始数据;(4)测量过程:根据测量任务,制定测量过程,以便在测量过程中收集有效数据。
水下地形测量操作指南(天宝)

RTK水下地形测量简要操作指南一.内业准备a.预装的软件有Trimble configuration Toolbox清华山维成图软件EPS坐标转换软件Coodr3.1Excel电子表格b.设置NMEA GGA输出格式1. 连接计算机串口com1与接收机串口com22. 启动configuration Toolbox 软件3. Communications/Get File激活current4. Contents列表框中选“File”,并选中As auto power up file5. Adailable列表框中激活“Output”,并设置输出串口(5700主机)、频率、类型:Message type: NMEASerial port: Port 2Frequency: 1HZMessage subtype: GGA6. Contents列表框中选“Serial-Port 2”,并设置5700输出串口与计算机传输的波特率:Receiver serial port: port 2Baud rate: 9600Parity: NoneFlow control: None7. 所有设置完毕,单击Transmit将设置好的文件传输到5700主机中8. Communications/Activate File激活我们刚才传输到5700主机中的文件power_up9. 屏幕弹出信息表示成功10. Windows菜单“开始\程序\附件\通讯”中运行“超级终端”11. 任意给定一个名称,确定后弹出的“连接到”对话框中,将“连接时使用”设置为与5700通讯时计算机串口号(一般为com 1),点击确定,弹出属性框,设置如下:波特率:9600数据位:8奇偶校验: 无停止位: 1数据流控制:硬件应用后可在窗口中看见5700主机发送出的GGA信息。
c.同样在超级终端中可检测来自测深仪的信息。
d.测深仪操作1. 新建工程2. 投影设置坐标系统:北京-54坐标系投影方式:高斯投影3°带(如为任意中央子午线则选自定义投影) 图定义:如为标准分带,则Y坐标附带号。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
RTK水下地形测量简要操作指南
一.内业准备
a.预装的软件
Trimble configuration Toolbox
清华山维成图软件EPS
坐标转换软件Coodr3.1
Excel电子表格
b.设置NMEA GGA输出格式
1. 连接计算机串口com1与接收机串口com2
2. 启动configuration Toolbox 软件
3. Communications/Get File激活current
4. Contents列表框中选“File”,并选中As auto power up file
5. Adailable列表框中激活“Output”,并设置输出串口(5700主机)、频率、类型:
Message type: NMEA
Serial port: Port 2
Frequency: 1HZ
Message subtype: GGA
6. Contents列表框中选“Serial-Port 2”,并设置5700输出串口与计算机传输的波特率:
Receiver serial port: port 2
Baud rate: 9600
Parity: None
Flow control: None
7. 所有设置完毕,单击Transmit将设置好的文件传输到5700主机中
8. Communications/Activate File激活我们刚才传输到5700主机中的文件power_up
9. 屏幕弹出信息表示成功
10. Windows菜单“开始\程序\附件\通讯”中运行“超级终端”
11. 任意给定一个名称,确定后弹出的“连接到”对话框中,将“连接时使用”设置为与5700通讯时计算机串口号(一般为com 1),点击确定,弹出属性框,设置如下:
波特率:9600
数据位:8
奇偶校验: 无
停止位: 1
数据流控制:硬件
应用后可在窗口中看见5700主机发送出的GGA信息。
c.同样在超级终端中可检测来自测深仪的信息。
d.测深仪操作
1. 新建工程
2. 投影设置
坐标系统:北京-54坐标系
投影方式:高斯投影3°带(如为任意中央子午线则选自定义投影)
图定义:如为标准分带,则Y坐标附带号。
转换参数:利用基准站的WGS84和北京-54坐标系计算
一级转换:如为独立坐标系,则利用2个已知点计算参数
3. 设置\记录设置
航迹记录:按距离/时间
记录格式:直角坐标
4. 设置\端口分配
定位仪口:COM4
测深仪口中:COM5
5. 设置\定位仪接口
波特率:9600
通信试验可检查定位信号(测深仪接口可同样设置和检测) 测深仪口中:COM5
天线高:量取天线至水面高度输入
6.设置\天线偏差改正
当GPS天线与测深探头位置不一致时,输入参数。
7. 设置\延迟校正
一般延迟量为0.20,可根据情况改变。
8.作图\坐标库
有关坐标数据如设计航线、测图范围等可输入存贮。
功能\生成可自动生成平行线等。
9.作图\坐标作图
选择库文件后,可按要求绘出各种线条
二.RTK基准站设置
a 架设基准站
基准站仪器的架设(对中整平、天线电缆及电源电缆的连接、量取天线高等)
b 控制器开机,进入TSC1主菜单
c“文件/任务管理”中新建任务(如任务已存在则略过此步。
)
1.键入名称
2.选择坐标系统/键入参数/投影(例:1954北京坐标系/1980西安坐标系)
投影: 横轴墨卡托投影
假北: 0.000 m
假东: 500000 .000m
纬度原点: 0°00′00.000000N
中央子午线:(根据公式3N或6N-3计算)
比例因子: 1.0000000000
椭球长半轴: 6378245.000m /6378140.000m
扁率: 298.300000000 /298.2570000000
3.选择坐标系统/键入参数/基准转换(以三参为例)
类型:三参数
长半轴: 6378245.000m /6378140.000m
扁率: 298.300000000 /298.2570000000
X轴平移量: 0.000m
Y轴平移量: 0.000m
Z轴平移量: 0.000m
4.选择坐标系统/键入参数/水平平差(一般选择无平差)
5.选择坐标系统/键入参数/垂直平差(一般选择无平差)
6.F1键“确认”
7.文件/检查当前的任务(检查当前任务的属性设置是否正确)
8.Esc或M emu鍵退回到主菜单(此时屏幕最上方显示出当前任务即刚新建的任务)d 文件/任务管理/选择任务
e“配置/测量形式/Trimble RTK”或“测量/Trimble RTK”中F5“编辑”键入
1.基准站选项
广播格式:CMR+
输出另外的RTCM代码:否
测站索引:29
高度角限制:10°00′00″
天线高度:钢尺量取
类型:Zephyr
测量到:Top of notch。