无刷直流电机仿真教程
一种基于Matlab的无刷直流电机控制系统建模仿真方法

一种基于Matlab的无刷直流电机控制系统建模仿真方法一、本文概述无刷直流电机(Brushless DC Motor, BLDC)以其高效率、低噪音、长寿命等优点,在航空航天、电动汽车、家用电器等领域得到广泛应用。
为了对无刷直流电机控制系统进行性能分析和优化,需要建立精确的数学模型并进行仿真研究。
Matlab作为一种强大的数学计算和仿真软件,为无刷直流电机控制系统的建模仿真提供了有力支持。
二、无刷直流电机控制系统原理1、无刷直流电机基本结构和工作原理无刷直流电机(Brushless Direct Current Motor,简称BLDCM)是一种基于电子换向技术的直流电机,其特点在于去除了传统直流电机中的机械换向器和电刷,从而提高了电机的运行效率和可靠性。
无刷直流电机主要由电机本体、电子换向器和功率驱动器三部分组成。
电机本体通常采用三相星形或三角形接法,其定子上分布有多个电磁铁(也称为线圈),而转子上则安装有永磁体。
当电机通电时,定子上的电磁铁会产生磁场,与转子上的永磁体产生相互作用力,从而驱动转子旋转。
电子换向器是无刷直流电机的核心部分,通常由霍尔传感器和控制器组成。
霍尔传感器安装在电机本体的定子附近,用于检测转子位置,并将位置信息传递给控制器。
控制器则根据霍尔传感器提供的位置信息,控制功率驱动器对定子上的电磁铁进行通电,从而实现电机的电子换向。
功率驱动器负责将控制器的控制信号转换为实际的电流,驱动定子上的电磁铁工作。
功率驱动器通常采用三相全桥驱动电路,具有输出电流大、驱动能力强等特点。
无刷直流电机的工作原理可以简单概括为:控制器根据霍尔传感器检测到的转子位置信息,控制功率驱动器对定子上的电磁铁进行通电,产生磁场并驱动转子旋转;随着转子的旋转,霍尔传感器不断检测新的转子位置信息,控制器根据这些信息实时调整电磁铁的通电状态,从而保持电机的连续稳定运行。
由于无刷直流电机采用电子换向技术,避免了传统直流电机中机械换向器和电刷的磨损和故障,因此具有更高的运行效率和更长的使用寿命。
水下机器人的驱动系统仿真--无刷直流电动机仿真

水下机器人的驱动系统仿真--无刷直流电动机仿真(硕士论文)因为导师还没有给我具体的方向,只是让我先了解水下机器人的相关知识。
所以我只是对机器人的整体有个了解,还没有做深入的研究,望老师理解!因此本文首先就自治水下机器人(AUV)的数学模型和三维模型及工作原理等相关知识做了介绍,主要仿真部分是在水下机器人的动力系统。
本文只是选里一个方向的动力推动,其他方向的推动系统没有仿真。
本文把无刷直流电动机作为水下机器人的动力系统,并用simulink对其进行仿真。
1 绪论 (1)1.1研究意义 (1)1.2 AUV的介绍 (1)1.3国内外AUV研究动态 (2)2 水下机器人的总体设计及建模 (4)2.1 AUV 物理模型 (4)2.2 AUV的动力学分析 (6)2.2.1坐标系 (6)2.2.2定义运动参数 (7)2.2.3 受力分析 (7)3 水下驱动系统 (12)3.1 驱动方式的选用 (12)3.2 推力器的组成 (12)3.3 能源供给方式的选用 (13)4 AUV动力装置无刷直流电机驱动系统仿真 (14)4.1 无刷直流电机的基本结构 (14)4.2无刷直流电机的工作原理 (14)4.3 控制策略选择[3] (15)4.4 电动机本体的建模 (16)4.4.1 无刷直流电机的数学模型[4] (17)4.4.2 无刷直流电机本体的建模 (19)4. 5 驱动系统建模 (24)4.5.1 速度控制模块 (25)4.5.2 参考电流模块 (27)4.5.3电流滞环控制模块[7] (29)4.5.4 电压逆变器模块 (30)5 仿真结果及分析......................................................................................... - 32 -5.1 建模仿真参数设定.................................................................................. - 32 -5.2 仿真环境输入值设定.............................................................................. - 32 -5.3 仿真结果及分析...................................................................................... - 32 -5.3.1绕组电流仿真结果............................................................................... - 32 -5.3.2反电动势仿真结果............................................................................... - 33 -5.3.3转过角度及转子位置仿真结果........................................................... - 34 -5.3.4电机转速仿真结果............................................................................... - 35 -5.3.5 输出转矩仿真结果............................................................................... - 36 -6 总结............................................................................................................. - 38 -参考文献......................................................................................................... - 39 -致谢................................................................................................................. - 40 -1 绪论1.1研究意义近年来国外水下机器人技术发展迅速,技术水平较高。
无刷直流电机控制系统的设计及仿真.
目录1 前言............................................................................................................... - 1 -1.1 无刷直流电机的发展......................................................................... - 1 -1.2 无刷直流电机的优越性..................................................................... - 1 -1.3 无刷直流电机的应用......................................................................... - 2 -1.4 无刷直流电机调速系统的研究现状和未来发展............................. - 2 -2 无刷直流电机的原理................................................................................... - 4 -2.1 三相无刷直流电动机的基本组成..................................................... - 4 -2.2 无刷直流电机的基本工作过程......................................................... - 5 -2.3 无刷直流电动机本体......................................................................... - 6 -2.3.1 电动机定子............................................................................... - 6 -2.3.2 电动机转子............................................................................... - 7 -2.3.3 有关电机本体设计的问题....................................................... - 8 -3 转子位置检测............................................................................................... - 9 -3.1 位置传感器检测法............................................................................. - 9 -3.2 无位置传感器检测法....................................................................... - 10 -4 系统方案设计............................................................................................. - 12 -4.1 系统设计要求................................................................................... - 12 -4.1.1 系统总体框架......................................................................... - 12 -4.2 主电路供电方案选择....................................................................... - 12 -4.3 无刷直流电机电子换相器............................................................... - 14 -4.3.1 三相半控电路......................................................................... - 14 -4.3.2 三相全控电路......................................................................... - 15 -4.4 无刷直流电机的基本方程............................................................... - 16 -4.5 逆变电路的选择............................................................................... - 18 -4.6 基于MC33035的无刷直流电动机调速系统................................... - 19 -4.6.1 MC33035无刷直流电动机控制芯片...................................... - 19 -4.6.2 基于MC33035的无刷直流电动机调速系统设计 ................ - 20 -5 无刷直流电机调速系统的MATLAB仿真................................................... - 23 -5.1 电源、逆变桥和无刷直流电机模型............................................... - 24 -5.2 换相逻辑控制模块........................................................................... - 25 -5.3 PWM调制技术.................................................................................... - 30 -5.3.1 等脉宽PWM法......................................................................... - 32 -5.3.2 SPWM(Sinusoidal PWM)法..................................................... - 32 -5.4 控制器和控制电平转换及PWM发生环节设计............................... - 32 -5.5 系统的仿真、仿真结果的输出及结果分析................................... - 34 -5.5.1 起动,阶跃负载仿真............................................................. - 34 -5.5.2 可逆调速仿真......................................................................... - 36 -6 总结和体会................................................................................................. - 38 -无刷直流电机调速控制系统设计1前言直流无刷电机,无机械刷和换向器的直流电机,也被称为无换向器直流电动机。
一种基于 Matlab的无刷直流电机控制系统建模仿真方法

一种基于Matlab的无刷直流电机控制系统建模仿真方法摘要:在分析无刷直流电机(BLDC)数学模型的基础上,提出了一种无刷直流电机控制系统仿真建模的新方法。
在Matlab/Simulink环境下,把独立的功能模块和S函数相结合,构建了无刷直流电机系统的仿真模型。
系统采用双闭环控制:速度环采用离散PID控制,根据滞环电流跟踪型PWM逆变器原理实现电流控制。
仿真和试验结果与理论分析一致,验证了该方法的合理性和有效性。
此方法也适用于验证其他控制算法的合理性,为实际电机控制系统的设计和调试提供了新的思路。
关键词:无刷直流电机;建模;仿真;电流滞环;Matlab中图分类号:TP391.9 文献标识码:A 文章编号:1004-731X (2008) 02-293-06A Method for Modeling andSimulation ofBrushless DC Motor Control System based on MatlabYIN Y un-hua, ZHENG Bin, ZHENG Hao-xin(National Key Laboratory for Electronic Measurement Technology, North University of China, Taiyuan 030051, China)Abstract: Based on the mathematical model of the Brushless DC motor (BLDC), a novel method for modeling and simulation of BLDC control system was proposed. In Matlab/Simulink, by the combination of the isolated functional blocks and S-functions, the model of BLDC could be established. In the double loop of control system, a discrete PID controller was adopted in the speed loop and a current controller was completed in the current loop on the principle of hysteresis current track PWM inverter. The reasonability and validity were testified by the coincidence of the simulation and experimentation results and theory analysis. This novel method is also suitable for verifying the reasonability of other control algorithms and offers a new thinking for designing and debugging actual motors. Key words: BLDC; modeling; simulation; hysteresis current; Matlab引言1无刷直流电机(Brushless DC Motor,以下简称BLDC)是随着电力电子技术及新型永磁材料的发展而迅速成熟起来的一种新型电机。
永磁无刷直流电机的Simulink仿真

永磁无刷直流电机的Simulink仿真 对磁悬浮飞轮用无刷直流电机系统进行建模,仿真得到系统工作时各种参数、数据变化趋势和实验结果,能够有效地指导和验证控制系统的设计。
本书采用Mathworks公司的MATLAB作为仿真工具,其中的Simulink是一个用来对动态系统进行建模、仿真和分析的软件包。
使用其中的S-Function模块,结合编写C MEX S-FUNCTION,结合Simulink内含的丰富的数学运算逻辑模块和电力电子模块,能够准确地构造出磁悬浮飞轮用无刷直流电机及其控制模型。
在Simulink中对无刷直流电机仿真建模,国内外已进行了广泛的研究。
电机绕组反电动势波形可采用FFT法和有限元法实现,尽管这种方法得到的反电动势波形比较精确,但结合控制系统仿真时会极大地影响仿真速度。
此外,可以根据能够反映转子位置变化的绕组电感模块来获得反电动势波形,但如果永磁无刷直流电机的相电感极小,转子位置变化引起的电感变化量可忽略,那么该方法对小电枢电感的永磁无刷直流电机的建模并不适用;也可以使用分段线性法实现梯形波反电动势,并采取一些改进的仿真方法实现电机控制系统模型。
但在这些文献中,电机的换相是基于电流滞环控制的,需要三个电流互感器测量三相电流,具体实现时成本较高,开关噪声较大。
另外,在永磁无刷直流电机系统仿真时,应体现出脉宽调制(PWM)的作用。
从仿真结果来看,上述模型基本上还是属于模拟控制系统。
以上这些模型与目前永磁无刷直流电机控制普遍采用的基于数字信号处理器(DSP)的转速、电流双闭环数字控制系统不符合。
本文中系统模型根据实际磁悬浮飞轮用无刷直流电机DSP数字控制系统构建。
实际系统采用TI公司的DSP TMS320LF2407作为主控制器,IR2130作为三相逆变桥的驱动芯片,MOSFET管IRF3710组成三相逆变桥,对直流电源输出的母线电流进行采样,DSP输出6路脉宽调制PWM信号对电机的相电流和转速进行控制。
无刷直流电机控制系统的仿真
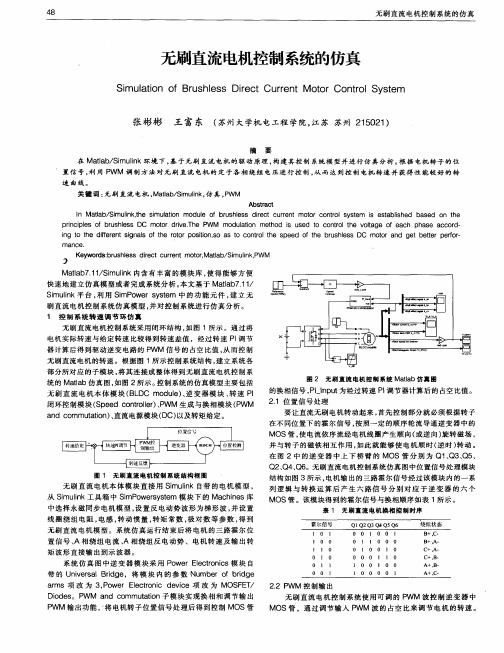
a n d c o mmu t a t i o n ) 、 直 流 电源模 块 ( D C) 以及 转 矩 给定 。
在 图 2中 的 逆 变 器 中 上 下 桥 臂 的 MOS 管 分 别 为 Q1 、 Q 3 、 Q5 、
Q2 、 Q4 、 Q 6 。无 刷直 流 电机控 制 系 统 仿 真 图 中位 置 信号 处 理 模块
无 刷 直 流 电 机 控 制 系 统 的 仿 真
无刷直流电机控制系统的仿真
Si mu l a t i o n o f B r u s h l e s s Di r e c t Cu r r e n t Mo t o r Co n t r o l Sy s t e m
的换 相信 号 , P I — I n p u t 为经 过 转 速 P l 调 节器 计 算 后 的 占空 比值 。 2 . 1 位 置 信 号 处 理 要 让 直流 无 刷 电 机 转动 起 来 , 首先 控 制 部 分 就 必 须 根据 转 子 在 不 同位 置 下 的霍 尔 信 号 , 按 照 一定 的顺 序 轮 流 导 通逆 变器 中 的 MOS管 , 使 电流 依 序 流 经 电 机线 圈产 生 顺 向( 或逆 向) 旋转磁场 , 并 与 转 子 的磁 铁 相 互 作 用 , 如 此 就 能 够 使 电机 顺 时 ( 逆时 ) 转动 。
i n g t o t he di fer en t s i gn al s o f t h e r ot or po s i t i o n, S O as t o co n t r ol t h e s pe e d of t h e b r u s hl es s DC m o t or a n d g e t be t t e r pe r f or —
无刷直流电机仿真教程
基于MATLAB/SIMULINK的无刷直流电动机系统仿真0引言无刷直流电机(Brushless DC Motor,以下简称BLDCM),是随着电力电子技术和永磁材料的发展而逐渐成熟起来的一种新型电机。
为了有效的减少控制系统的设计时间,验算各种控制算法,优化整个控制系统,有必要建立BLDCM 控制系统仿真模型。
本文在BLDCM数学模型的基础上,利用MATLAB的SIMULINK和S-FUNCTION建立BLDCM的仿真模型,并通过仿真结果验证其有效性。
1无刷直流电机仿真模型本文在MATLAB的SIMULINK的环境下,利用其丰富的模块库,在分析BLDCM数学模型的基础上,建立BLDCM控制系统仿真模型,系统结构框图如图1所示。
图1 无刷直流电机控制原理框图以图1为基础,按照模块化建模的思想搭建的系统的仿真模型如图2所示。
整个控制系统主要包括电动机本体模块、逆变器模块、电流滞环控制模块、速度控制模块等。
图2 无刷直流电机控制系统仿真模型框图1.1电动机本体模块在整个控制系统的仿真模型中,BLDCM本体模块是最重要的部分,该模块根据BLDCM电压方程求取BLDCM三相相电流,而要获得三相相电流信号i a,i b,i c必须首先求得三相反电动势信号e a,e b,e c,整个电动机本体模块的结果如下图3所示。
电机本体模块包括反动电势求取模块,中性点求取模块,转矩计算模块和位置检测模块。
图3 电机本体模块1.反电势求取模块本文直接采用了SIMULINK中的Lookup Table模块,运用分段线性化的思想,直观的实现了梯形波反电动势的模拟,具体实现如图4所示。
图4 反电势求取模块Lookup Table模块的实质是通过查表构造反电动势波形,只要把360°内的反电动势的单位波形预先输入至Lookup Table模块中,就能得到其单位理想波形,由前面的数学模型知道,反电势梯形波的幅值为:e=Ke*ω。
永磁无刷直流电动机的设计和仿真研究
永磁无刷直流电动机的设计和仿真研究一、本文概述本文旨在全面探讨永磁无刷直流电动机(Permanent Magnet Brushless DC Motor, PMBLDCM)的设计和仿真研究。
永磁无刷直流电动机作为现代电力驱动系统的关键组件,具有高效率、高功率密度、低噪音和低维护成本等诸多优点,因此在电动汽车、航空航天、家用电器等领域得到了广泛应用。
本文将从理论基础、设计原则、仿真方法、优化策略等多个方面,对永磁无刷直流电动机的设计和仿真进行深入研究。
本文将概述永磁无刷直流电动机的基本工作原理和结构特点,为后续的设计研究和仿真分析奠定理论基础。
接着,重点讨论电动机设计过程中的关键因素,包括绕组设计、磁路设计、热设计以及电磁兼容性设计等,并提出相应的设计原则和优化策略。
在此基础上,本文将探讨基于数值计算的仿真分析方法,包括有限元分析、电路仿真、热仿真等,以评估电动机的性能和可靠性。
本文将总结永磁无刷直流电动机设计和仿真研究的最新进展,展望未来的发展趋势和研究方向。
通过本文的研究,旨在为读者提供一套完整的永磁无刷直流电动机设计和仿真分析框架,为推动该领域的技术进步和应用发展做出贡献。
二、永磁无刷直流电动机的基本原理与特点永磁无刷直流电动机(Permanent Magnet Brushless DC Motor, PMBLDCM)是一种结合了直流电机与无刷电机技术的先进电动机类型。
其基本原理在于利用永久磁铁产生的恒定磁场作为电机的励磁场,并通过电子换向器实现电流的换向,从而实现电机的连续旋转。
这种设计消除了传统直流电机中的机械换向器和电刷,显著提高了电机的运行效率和可靠性。
高效率:由于消除了机械换向器和电刷,减少了能量损失和摩擦,使得PMBLDCM具有更高的运行效率。
高转矩密度:永磁体产生的恒定磁场使得电机在相同体积下能够产生更大的转矩。
良好的调速性能:通过电子换向器,可以实现对电机转速的精确控制,满足各种应用需求。
无刷直流电机控制系统的仿真与分析
无刷直流电机控制系统的仿真与分析一、本文概述随着科技的不断进步和电机技术的快速发展,无刷直流电机(Brushless Direct Current, BLDC)因其高效、低噪音、长寿命等优点,已广泛应用于电动汽车、无人机、家用电器等众多领域。
然而,无刷直流电机的控制系统设计复杂,涉及电子技术、控制理论、电机学等多个学科领域,因此,对其进行深入研究和仿真分析具有重要意义。
本文旨在探讨无刷直流电机控制系统的基本原理、仿真方法以及性能分析。
将简要介绍无刷直流电机的基本结构和控制原理,包括其电机本体、电子换向器、功率电子电路等关键部分。
将详细介绍无刷直流电机控制系统的仿真建模过程,包括电机模型的建立、控制算法的设计以及仿真环境的搭建。
通过对仿真结果的分析,评估无刷直流电机控制系统的性能,包括动态响应、稳态精度、效率等指标,并提出优化建议。
本文的研究不仅有助于深入理解无刷直流电机控制系统的运行机制和性能特点,还可为实际工程应用提供理论支持和指导。
通过仿真分析,可以预测和优化无刷直流电机控制系统的性能,提高系统的稳定性和可靠性,推动无刷直流电机在更多领域的应用和发展。
二、无刷直流电机控制系统基本原理无刷直流电机(Brushless DC Motor, BLDCM)是一种采用电子换向器替代传统机械换向器的直流电机。
其控制系统主要由电机本体、电子换向器(也称为功率电子电路或逆变器)以及控制器三部分组成。
无刷直流电机控制系统的基本原理,就在于如何准确地控制逆变器的开关状态,从而改变电机内部的电流流向,实现电机的连续旋转。
控制器根据电机的运行状态和用户的输入指令,生成适当的控制信号。
这些控制信号是PWM(脉宽调制)信号,用于控制逆变器的开关状态。
逆变器一般由六个功率开关管(如MOSFET或IGBT)组成,分为三组,每组两个开关管串联,然后三组并联在直流电源上。
每组开关管分别对应电机的一个相(A、B、C),通过控制每组开关管的通断,可以改变电机每相的电流大小和方向。
无刷直流电机调速系统的建模与仿真分析
无刷直流电机调速系统的建模与仿真分析摘要:本文基于电机运行方程建立无刷直流电机的仿真模型,对无刷直流电机的转速环、电流环双环控制策略进行仿真,通过仿真结果验证无刷直流电机仿真模型的有效性以及控制策略的有效性。
主题词:无刷直流电机;建模;仿真;控制。
1 无刷直流电机控制系统的组成本文所建立的无刷直流电机控制系统由无刷直流电机、三相电压型逆变器、检测电路、控制电路组成,采用速度环和电流环双环控制,如图1所示。
速度环利用与电机同轴的霍尔传感器检测电机的转速,与参考转速进行比较,速度环的输出作为电流环三相参考电流的幅值,结合电机转子的位置信息得到电流环的参考电流,,。
电流检测电路测量无刷直流电机的三相定子电流、、,与三相参考电流进行滞环比较,电流环的输出经过控制电路转化为逆变器开关管IGBT的的控制信号,控制逆变器输出无刷直流电机需要的定子电流。
图1 无刷直流电机控制系统的组成框图3 无刷直流电机控制系统的数学模型3.1电机数学模型无刷直流电机定子绕组为三相Y型接法,两两导通方式,驱动电路采用三相全桥逆变电路。
为了方便分析BLDCM的数学模型及电磁转矩等特性,作如下假设[2]:(1)三相绕组完全对称,气隙磁场分布为梯形波,平顶宽为120°电角度;(2)忽略齿槽、换相过程和电枢反应的影响;(3)磁路不饱和,不计涡流和磁滞损耗;(4)电枢绕组在定子内表面均匀连续分布。
3.1.1 电压平衡方程BLDCM的电压平衡方程如公式1所示。
(1)式中,、、——定子各相电压,单位:V;——定子电阻,单位:;、、——定子各相电流,单位:A;,——定子电感,互感,单位:H;、、——各相反电势,单位:V。
3.1.2 转矩方程和机械运动方程BLDCM的转矩方程如公式2所示,机械运动方程如公式3所示。
(2) (3)式中,——电磁转矩,单位;——电机转子减速度,单位rad/s;——负载转矩;单位为;——转动惯量,单位为;——阻尼系数,单位为。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于MATLAB/SIMULINK的无刷直流电动机系统仿真
0引言
无刷直流电机(Brushless DC Motor,以下简称BLDCM),是随着电力电子技术和永磁材料的发展而逐渐成熟起来的一种新型电机。
为了有效的减少控制系统的设计时间,验算各种控制算法,优化整个控制系统,有必要建立BLDCM控制系统仿真模型。
本文在BLDCM数学模型的基础上,利用MATLAB的SIMULINK和S-FUNCTION建立BLDCM的仿真模型,并通过仿真结果验证其有效性。
1无刷直流电机仿真模型
本文在MATLAB的SIMULINK的环境下,利用其丰富的模块库,在分析BLDCM 数学模型的基础上,建立BLDCM控制系统仿真模型,系统结构框图如图1所示。
图1 无刷直流电机控制原理框图
以图1为基础,按照模块化建模的思想搭建的系统的仿真模型如图2所示。
整个控制系统主要包括电动机本体模块、逆变器模块、电流滞环控制模块、速度控制模块等。
图2 无刷直流电机控制系统仿真模型框图
1.1 电动机本体模块
在整个控制系统的仿真模型中,BLDCM本体模块是最重要的部分,该模块根据BLDCM电压方程求取BLDCM三相相电流,而要获得三相相电流信号i a,i b,i c必须首先求得三相反电动势信号e a,e b,e c,整个电动机本体模块的结果如下图3所示。
电机本体模块包括反动电势求取模块,中性点求取模块,转矩计算模块和位置检测模块。
图3 电机本体模块
1.反电势求取模块
本文直接采用了SIMULINK中的Lookup Table模块,运用分段线性化的思想,直观的实现了梯形波反电动势的模拟,具体实现如图4所示。
图 4 反电势求取模块
Lookup Table模块的实质是通过查表构造反电动势波形,只要把360°内的反电动势的单位波形预先输入至Lookup Table模块中,就能得到其单位理想波形,由前面的数学模型知道,反电势梯形波的幅值为:e=Ke*ω。
其中Ke为电机的反电动势系数。
具体的Lookup Table参数设置参照下表1。
表 1 位置信号和单位反电动势的关系
位置0 60 120 180 240 300 360
A 1 1 1 -1 -1 -1 1
B -1 -1 1 1 1 -1 -1
C 1 -1 -1 -1 1 1 1
2.转矩计算模块
依据数学模型建立转矩计算模型如图5所示。
图5 转矩计算模块
3.中性点求取模块
求出反电动势后根据电压平衡方程来求中性点电压,具体模块如图6所示。
图6 中性点求取模块
4.转子位置检测模块
图7 转子位置检测模块
1.2 速度PID控制模块
速度控制模块采用PID调节。
图 8 PID控制模块
1.3 参考电流模块
参考电流模块的作用是根据电流幅值信号Is和位置信号pos求出三相参考电流。
参考电流模块的功能通过S函数实现。
1.4 电流滞环控制模块
电流滞环控制模块的作用是实现滞环电流控制,输入端l、2、3为三相实际电流,4、5、6为三相参考电流,输出为脉冲信号,滞环的环宽设为0-1之间。
模块结构框图如图10所示。
图 10 电流滞环控制模块
1.5 电压逆变模块
电压逆变器模块实现的是逆变器功能,输入为位置信号和电流滞环控制模块信号及电压逆变控制信号,输出为三相端电压,其中,可以通过编写S函数实现从转子位置信号得到六个MOSFET导通开关信号。
如图11所示。
三相的上桥臂控制信号与电流滞环控制模块得到的信号进行逻辑与运算,即可得到控制开关的逻辑信号,如图11所示。
由于6个MOSFET只可能同时有两个导通,且两个管不能为同相,所以可选用二选一开关来得到三相端电压,如图12所示。
在本文设计的模型中,额定电压设为72V,则端电压的一半为36V。
图 12 开关功率管模块
2仿真结果
仿真中,BLDCM参数设置为:额定转速n=120rad/s,定子相绕组电阻R=1.25欧姆,定子相绕组自感L=0.055H,互感M=0.003H,转动惯量为0.006kg.m2,反
电势系数为Ke=0.22V/rad/s。
极对数为n p=1,72V直流电源供电。
在t=0.2s时,加负载2N.m。
可得到系统转速,转矩,相电流,相反电动势仿真曲线如图13-16所示。
图13 转速响应曲线
图14 转矩响应曲线
图15 相电流波形
图16相反电动势波形
由仿真波形可以看出,在n=120rad/s参考转速下,系统响应快速且平稳相电流和反电动势波形较为理想,转矩脉动较大。
仿真结果证明了本文所提出的这种BLDCM仿真建模方法的有效性。
3总结
在Matlab/Simulink仿真环境下,可以方便地建立BLDCM的仿真模型。
对于个别新的Simulink模块,应用S函数来实现,可以充分发挥Matlab编程的灵活性与Simulink的简单直观性,加速无刷直流电动机调速系统的开发。
参考文献
[1] 兰宝华. 无刷直流电动机无位置传感器位置检测技术的研究,中南大学.
[2] 叶长青,尹华杰,赵海波.无刷直流电动机驱动系统Matlab仿真建模及模型中S函数的实
现[J].微电机.
附录
referenceCurrent.m 参考电流模块S函数:function sys=mdlOutputs(t,x,u)
if (u>=0)&(u<pi/3)
sys=[1;-1;0];
elseif (u>=pi/3)&(u<2*pi/3)
sys=[1;0;-1];
elseif (u>=2*pi/3)&(u<pi)
sys=[0;1;-1];
elseif (u>=pi)&(u<4*pi/3)
sys=[-1;1;0];
elseif (u>=4*pi/3)&(u<5*pi/3)
sys=[-1;0;1];
else
sys=[0;-1;1];
end
inverter.m 电压模块S函数:
function sys=mdlOutputs(t,x,u)
if u>=0&u<pi/3
sys=[1 0 0 1 0 0];
elseif u>=pi/3&u<2*pi/3
sys=[1 0 0 0 0 1];
elseif u>=2*pi/3&u<pi
sys=[0 0 1 0 0 1];
elseif u>=pi&u<4*pi/3
sys=[0 1 1 0 0 0];
elseif u>=4*pi/3&u<5*pi/3
sys=[0 1 0 0 1 0];
else
sys=[0 0 0 1 1 0];
end。