猴车越位保护的研制及使用
猴车软启动与防掉绳装置的研制与使用

Automatic Control •自动化控制Electronic Technology & Software Engineering 电子技术与软件工程• 101【关键词】猴车软启动 防掉绳装置 研制 使用猴车全称为矿山架空乘人索道,主要的用途就是对地下矿山工人进行传送。
目前煤矿生产中对猴车的使用不断增加,怎样保证候车的安全运行也逐渐成为了人们关注的重点问题。
在猴车启动过程中如果猴车钢丝绳扭劲,很容易造成猴车钢丝绳脱落,给猴车运行和工作人员带来危险,基于此种危险情况,本文就将对猴车软启动和防掉绳装置的研制进行详细研究,希望能为猴车安全运行提供一定参考和帮助。
1 猴车结构特征和主要工作原理猴车装置主要是借助电动机作用带动减速机的驱动轮,在摩擦传动架空线路上对索轮上的无极钢丝绳进行支撑,在钢丝绳对吊椅和尾轮之间进行相应的循环运动。
在此环节中,钢丝绳借助尾部张紧装置进行张紧运动,有效实现钢丝绳在托轮减的张力,设有上下站机构。
其中猴车设备主要有驱动装置、被动尾轮装置、张紧装置、运载索道、拖绳、乘人吊具和抱索器、电控部分等组成。
2 猴车电控系统组成猴车电控系统主要有PLC 防爆电控箱、本案操作台、磁力启动机、制动器磁力启动器等,通过对失压、短路、过载保护猴车系统综合保护装置的结合,组成猴车电控系统。
此种装置主要应用的是日本三菱PLC 技术,通过设备的使用对系统控制工作进行编程。
一般猴车装置需要设置相应保护装置:过速、欠速保护、钢丝绳张紧保护和过卷保护等。
猴车软启动与防掉绳装置的研制与使用文/闫勇本文就将对猴车软启动和防掉绳装置的研制进行详细研究,希望能为猴车安全运行提供一定参考和帮助。
摘 要3 对PLC技术和软启动控制器的结合在猴车启动过程中,突然启动的装置对于电机、减速机和尾轮等机械设备产生严重的震动冲击,很容易造成设备损坏,设备在此种情况下出现严重磨损,不利于工作的正常运行,甚至还将对工作人员生命安全产生影响。
猴车安全运行措施

猴车安全运行措施猴车是一种用于捕捉和转移猴子的特殊车辆。
在研究猴子行为和保护野生动物方面,猴车发挥着重要的作用。
然而,在使用猴车的同时也要注意安全,保护野生动物和人员的安全。
本文将介绍猴车安全运行的措施。
猴车的基本结构猴车是一种特殊的工具,它的基本结构包括车体、驾驶室、保护栏和转盘。
车体通常由保护栏和转盘组成,保护栏是为了防止猴子从车上逃跑或攻击人员,转盘用于将猴子转移到另一个场地。
驾驶室则是为了保护驾驶员和工作人员。
通常猴车会使用防震材料和安全带等设备来保证驾驶员和工作人员的安全。
猴车的使用规范为了保证猴车的安全,必须遵守以下规范:1. 合格的驾驶员只有经过专业培训且持有合格证件的驾驶员才能驾驶猴车。
他们必须具备严谨的工作态度、良好的人际关系和足够的责任心。
2. 严格的车辆检查与维护在使用猴车前,必须进行全面的检查和维护。
包括对发动机、轮胎、灯光和油路等方面进行检查。
在使用过程中,如果出现任何故障或异常,必须立即停车处理,确保车辆的正常运行。
3. 人员配备在猴车工作过程中,至少需要两名工作人员,其中一名驾驶员,另一名用来操作保护栏和转盘,确保猴子和人员的安全。
4. 安全防范在使用过程中,必须严格遵守安全规定,确保工作区域的安全。
除了必要的防护设施外,必须严格强制安全规则和操作流程,以最大程度的保障工作人员和猴子的安全。
猴车在野生动物保护中的应用猴车作为一种特殊工具在野生动物保护中发挥着重要的作用。
只有使用科学的方法才能更好的保护猴子和人员的安全。
以下是一些常见的应用场景:1. 移动猴子在猴子需要转移的时候,猴车可以起到很好的作用。
通过转盘和保护栏等防护设施,将猴子从一个场地转移到另一个场地。
2. 野生动物调查在野生动物调查中,经常需要观察和采集猴子的生态习性和行为规律。
采用猴车技术可以更好的观察和采集数据,并且不会干扰猴子的生活。
3. 治疗猴子在猴子受伤或患病的时候,需要给予特殊的治疗。
通过猴车可以轻松的将猴子送到诊所进行治疗。
运人猴车操作步骤规程

运人猴车操作步骤规程运人猴车操作步骤规程1、操作前的准备工作1.1、确认猴车台车身平稳,并使操作面级平整,要清扫污物、冰雪及其他障碍物。
1.2、确认猴车起吊钩、缆绳、连接管等无缺损和磨损、变形等缺陷,如果发现有问题,应立即向上级报告。
1.3、确认猴车制动器、行走制动器、万向轮刹车等制动系统在操作过程中正常可靠。
1.4、检查猴车用电设备(例如,“三停一锁”等安全装置),并保证其正常。
2、铺路2.1、由于猴车本身比较重且受力点集中,在地面质量较差,容易出现事故。
所以,必须在猴车运转的道路上铺设一定厚度的木板或钢板,或者在地面上铺设混凝土或钢板等,以保证猴车的稳定安全运行。
2.2、在道路铺设木板或钢板时,应根据猴车的重量和受力面积计算上面的厚度,要保持木板或钢板的平整和整齐。
2.3、在道路铺设混凝土或钢板时,应根据地面情况进行加固处理,以猴车能够安全地行进。
3、车辆移动3.1、在猴车行进时,操作者需按照指定的路线行走。
如果需要改变路线,请事先向上级领导请求许可。
3.2、拾级行走时,车辆应缓慢行驶,捎带拾级不得行驶。
3.3、行驶中,车辆不得超速行驶或急刹车,不得滑行或刹车冲击,不得行驶在坡度超过规定值的路段。
3.4、在行驶时,车辆的高度过低、太高或超载等情况会影响安全。
要注意检查,并按照规定的使用要求进行操作。
3.5、在行驶时,猴车应放缓速度,保证车速匀速平稳,不得在人员正面或侧面行驶。
4、起吊操作4.1、起吊前,应先确认操作地点,并采用固定设备(如钢丝绳、带状物等)将预备起吊的物品或工人固定住位置。
4.2、启动猴车,驶进作业区域,通过指令确定吊钩、缆绳的起吊及下放方向、高度和点位。
4.3、吊起物品时,必须及时把吊钩缆绳放到位,然后才能慢慢吊离地面。
4.4、吊物过程中,操作者不得离开作业位,应专心负责操作,严禁打闲话、四处张望、吸烟等行为。
4.5、吊物过程中,应严防缆绳断裂、吊钩脱离等意外事故,一旦发现异常应立即停台并报告上级主管。
猴车越位保护的研制及使用
井下架空乘人装置越位保护装置的研制使用淄博光正实业有限公司机电科摘要:目前,井下运行的架空乘人装置(以下称猴车)的越位保护装置多种多样,有机械带动打点器防止越位的,有光电越位开关的,这些越位保护装置有些缺陷,这几种保护安装位置较低,会被人为的解除或机械装置损坏而造成越位保护起不到相应的作用。
为此,我们根据现场的实际情况,研制出一种灵敏可靠又不能人为的解除的越位保护装置。
关键词:架空乘人装置猴车越位开关传感器电气控制综合保护装置一、设计方案的提出目前,井下运行的架空乘人装置(以下称猴车)的越位保护装置多种多样,有机械带动打点器防止越位的,有光电越位开关的,这些越位保护装置有些缺陷,这些保护安装位置较低,会被人为的解除或机械装置损坏而造成越位保护起不到相应的作用。
为此,我们根据现场的实际情况,研制出一种灵敏可靠又不能人为的解除的越位保护装置。
二、主要用途1、保证猴车乘坐人员的安全。
三、越位开关的组成、原理:1、组成:由固定支架、越位托轮、磁钢、偏心铁块、传感器及相应的电路、低压控制开关等。
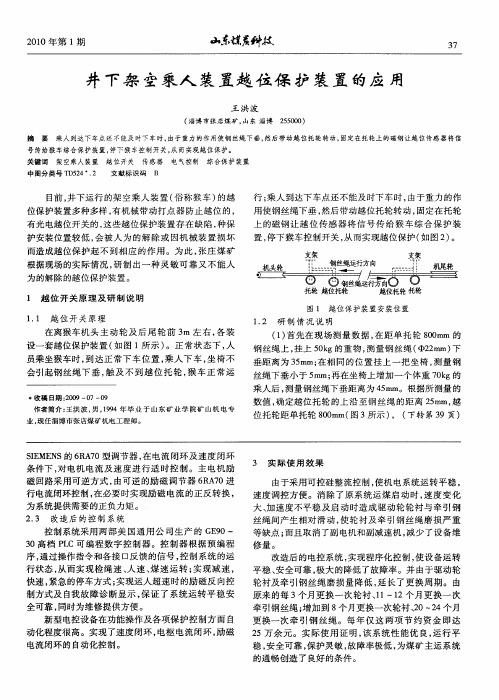
2、越位开关的原理:在离猴车机头主动轮及后尾轮前3米左右,各装设一套越位保护装置(装设位置如图所示,图1)。
正常状态下,人员乘坐猴车时,到达正常下车位置,乘人下车,坐椅不会引起钢丝绳下垂,触及不到越位托轮,猴车正常运行;若乘人到达下车点还不能及时下车时,由于重力的作用使钢丝绳下垂,然后带动越位托轮转动,固定在托轮上的磁钢让越位传感器将信号传给猴车综合保护装置,停下猴车控制开关,从而实现越位保护(如图2所示)。
四、研制情况及技术指标:1、首先我们在现象测量数据,在离距离单托轮800mm的钢丝绳上,挂上50kg的重物,测量钢丝绳(Φ22mm)下垂距离为35mm;在相同的位置挂上一把坐椅,测量钢丝绳下垂小于5mm;再在坐椅一个体重70kg的乘人后,测量钢丝绳下垂距离为45mm。
根据所测量的数值,确定越位托轮的上沿至钢丝绳的距离25mm,越位托轮距单托轮800mm(图3所示),这样既能保证猴车正常运行时,坐椅不会下压钢丝绳下垂,又能保证乘人来不及下车越位时,能及时停下猴车保证人员的安全。
井下架空乘人装置越位保护装置的应用
1 1 越 位 开 关 原 理 .
1 2 研 制 情 况 说 明 .
在离猴车机头 主动 轮 及后 尾轮 前 3 左 右 , 装 m 各 设一套 越位保 护装置 ( 图 1 如 所示 ) 。正 常状态下 , 人 员乘 坐猴车时 , 到达正 常下 车位 置 , 乘人 下 车 , 坐椅 不 会引起 钢丝绳 下 垂 , 及 不 到越 位托 轮 , 车正 常 运 触 猴
大 、 速度不平稳 及启 动时造成 驱动轮 轮衬与牵 引钢 加 丝绳 间产生相对 滑动 , 轮衬及 牵引钢 丝绳磨损严 重 使 等缺点 ; 而且 取消了副电机和副减速机 , 少了设 备维 减 修 量。 改造后 的电控系统 , 实现程序化控制 , 使设 备运转 平稳 、 安全可靠 , 大的降低 了故 障率。并 由于驱动轮 极 轮衬及 牵引钢丝 绳磨损 量 降低 , 延长 了更换周 期 。由 原来 的每 3 月更换 一次 轮衬 、1 2个 月更换 一次 个 1 ~l 牵引钢 丝绳 ; 增加到 8 个月更换一次轮衬 、0— 4个月 2 2 更换一 次牵 引 钢 丝绳 。每 年仅 这 两项 节约 资 金 即达 2 5万余 元 。实际使 用证 明 , 系统性 能优 良, 该 运行 平 稳, 安全可靠 , 保护灵敏 , 障率极低 , 故 为煤矿 主运 系统
业, 现任淄博市张店煤矿机电工程师。
S ME S的 6 A 0型 调 节 器 , 电 流 闭 环 及 速 度 闭 环 I E N R7 在 条件 下 , 电机 电流 及 速 度 进 行 适 时 控 制 。 主 电 机 励 对
3 实 际 使 用 效 果
磁 回路采 用可逆方式 , 由可逆 的励 磁调节 器 6 A 0进 R 7 行 电流 闭环控制 , 在必要时实现励磁 电流的正反转 换 , 为系统提供需要 的正负力矩 。
某矿猴车机尾延伸方案及安全技术措施
某矿业开展煤矿主井猴车机尾延伸方案及平安技术措施编制人:编制时间:2020年5月26日主井猴车机尾延伸方案及平安技术措施一、概述煤矿主斜井安装一部RJKY75-23/790型架空乘人装置,主井巷道倾角23º,巷道宽度4.8米,猴车运输距离790米。
主井口附近安设两组钢丝绳转向装置,在距离猴车机头25m处猴车钢丝绳由巷道右帮〔沿出井方向〕偏离巷道中线约30°方向转向,猴车机头安设在主井口出井方向左前方。
二、改造原因和目的随着主斜井掘进进度的加快和主斜井主运输皮带安装方案的实施,为了防止猴车跨皮带运行,满足人员运输距离,现对猴车机头局部进行改造调正,对机尾局部进行延伸。
各项技术要求沿用原先要求〔乘人间距、横梁间距、钢丝绳、头尾轮、电控等〕。
三、施工组织1.机电矿长白战锋负责猴车改造安装以及试运转的全部工作。
2.生产矿长张德忠负责劳动力的安排以及人员的调配。
3.机电副总负责改造方案的编制及技术指导工作。
4.当班带班领导及平安员协助机电矿长做好平安管理工作。
5.参与人员服从现场指挥,负责做好现场安排工作。
四、改造方案现在机尾位置在主井巷道约790m的位置,方案猴车机尾延伸至980m,延伸长度为190m,需要增加大约500m钢丝绳进行插接,增加横梁约27架,托、压绳轮根据现场情况和实际需要配备,机尾处施工上、下车平台。
机尾处吊挂迂回轮横梁间距2m,吊挂涨紧轮横梁距机尾轮吊挂横梁3m。
五、安装方案及措施〔1〕机尾撤除措施①运行猴车,将猴车钢丝绳需要延伸的部位运行至猴车机尾部。
②停止猴车运行,在猴车上、下人两侧适宜的位置将猴车钢丝绳固定牢靠,固定点至机尾长度必须满足钢丝绳插接的需求。
③在机尾处断开猴车钢丝绳,确保断开点到固定点距离满足钢丝绳插接的需求,并留有一定余量。
④在机尾轮上方顶板打设起吊锚杆,利用两个5t手拉葫芦起吊机尾轮,使机尾轮脱离机尾滑道。
⑤撤除机尾滑道及相关机尾涨紧附件。
⑥下放绞车,使大平板车或箕斗下放至机尾轮正下方,下放手拉葫芦,使机尾轮放置在大平板车或箕斗内。
猴车软启动与防掉绳装置的研制与使用
鼹塑整凰.猴车软启动与防掉绳装置的研制与使用张大成(山东新矿集团华源矿业公司,山东新泰271219)哺蜀由于猴车使用的日益广泛,使猴车安全运行成为煤矿运输的一个主题,由于猴车启动时对设备及人员带来的冲击容易造成人员的伤亡及设备的损坏,猴车钢丝绳的扭劲,使妁猴车钢丝绳容易脱落绳槽,给猴车运行及乘坐人员带来危险,针对这两种危险因素,分析研制了猴车软启动装置殁猴车钢丝绳防掉槽保护装置的使用,确保了猴车的安全运行。
躺阃猴车运行;纵动;蝌嘛护糨{}/。
t1|,|{}r?}/,,r{,1猴车的结构特征与工作原理猴车装置通过电动机带动减速机机构上的驱动轮,摩擦传动架空线路上支托在托L匿)索轮上的无极钢丝绳,由钢丝绳带动其上的吊椅在驱动轮和尾轮之间做循环运动。
其中钢丝绳通过尾部张紧装置进行张紧,以维持钢丝绳在托轮间的挠度和张力,并设有上下站机构。
该设备由驱动装置、被动尾轮装置及张紧装置、运载索、乘人吊具和抱索器部分、拖绳部分、电控部分组成。
2猴车电控系统的组成猴车电控系统由P LC防爆电控箱,本安操作台、驱动电机的磁力启动器、制动器磁力起动器以及具有失压、短路、断相、过载保护猴车系统综合保护装置。
该装置采用B本三菱系列P LC技术,实现可编程控制。
猴车设有以下各种保护:过速、欠速保护、钢丝绳张紧上限保护、重锤落地保护、过卷保护及沿线急停。
3PL C与软启动控制器的结合由于猴车启动时,突然启动,对电机、减速机以及尾轮等机械设备造膦立大的震动冲击,容易损坏设备,导致设备磨损严重,对设备不利,对乘坐在上面的人员产生晃动现象。
猴车电控系统后加装软启动控制器,使猴车电控系统与软启动控制器有f舶q结合,可减轻对机械设备的机械震动及冲击,给乘坐猴车人员带来安全。
在PL C控制系统中实现编程控制,输出一常开接点,带动一小型继电器,进而带动软启动器中的启动按钮,实现软启动,软停止。
使用该组合,使电机平滑加速,不会出现电机减压启动器常有的瞬时扫矩冲击现象,也不会出现电机减压启动器常有的电压和电流冲击现象。
猴车保护试验方法
架空乘人装置保护试验方法
一.架空乘人装置保护试验应遵循的原则
在日常检修中,检验保护试验装置各个环节是否正常,如有故障可及时发现和维修,确保当架空乘人装置处于真正故障状态时,能可靠动作,使其能按预先设定好的程序停车并报警,避免事故的发生。
二.架空乘人装置保护试验方法
1、超速保护将速度传感器的托轮上增加磁铁数量,观察操作台上显示速度值,当超过设定值10%时,系统是否自动停车。
2、打滑保护将速度传感器的托轮上减少磁铁数量,观察操作台上显示速度值,当低于设定值20%时,系统是否自动停车。
3、全程急停保护在任一点随意拉动急停拉线,系统是否自动停车。
4、防掉绳保护触动防掉绳保护装置,系统是否自动停车。
5、变坡点防掉绳保护人工扳动掉绳保护装置,系统是否自动停车。
6、张紧力下降保护人工拉动机尾重锤保护线,系统是否自动停车。
7、越位保护人工扳动机头机尾越位保护开关(或越位轮),系统是否自动停车。
架空乘人装置(猴车)安装施工规范标准
猴车安装施工规猴车是煤矿井下长距离运输人员的一种普遍的工具,属一种架空无极绳绞车,在钢索上加装吊椅乘坐人员,适用于井下斜巷及平巷人员运输,但些设备钢梁安装时岩巷帮构孔难度大,在调试过程中容易脱绳伤人,试运行时间长(由于钢丝绳扭应力无法释放,无法固定乘人吊椅,需长时间的运行使钢丝绳扭应力消除后方可上吊椅),钢丝绳弹性变形随运行时间的增大,紧尾轮在尾部滑道无法继续向后滑动,而失去紧力,钢丝绳在没有到使用极限就得被迫换绳,此设备在斜巷调试过程中存在脱绳,极大的威胁着调试人员的安全,为此采用有效的方法和必要的加装安全设施进行安装调试。
1.钢梁安装:1.1 安装钢梁时,以巷道腰线为基准线,根据设计高度和设计间距确定横梁的安装位置。
(中线垂直,腰线平行)1.2 具体安装方式须根据巷道实际情况确定,如下图示为各种安装方式,但无论采用何种方式,安装必须保证横梁底面与巷道底面与巷道腰线平行,横梁的长度方向必须水平且与安装中心线垂直;并做出中线标志。
双贯通梁式双支座式半挑挂顶式T 型顶板式双托梁式半贯半托式U 型锚杆式1.3 若巷道允许使用焊机,则将横梁与描杆(支撑座)之间焊牢。
1.4 机头机尾横梁标高尺寸偏差不大于±10mm。
1.5 托轮横梁标高尺寸偏差不大于±15mm。
1.6 全部横梁水平度为千分之三。
1.7 常见的工字钢梁安装是不合理的状态有如下几种:如下图,为巷道截面图,应保持工字钢水平。
如下图,为巷道的俯视来看。
如下图,为巷道侧视图,工字钢底面应平行于巷道底面。
正确的方式为1.4,其余三种均为错误的安装方式,其中序号5为高度测量方式错误。
1.8 驱动装置、迂回装置的横梁的安装驱动装置一般由两根横梁固定,在任何情况下,两根横梁的底面必须平行于巷道底面(或腰线),横梁的长度方向一定要在水平面,且与安装中心线垂直,在水平巷安装时,两根横梁底面必须在同一水平面;在斜巷上安装时,两根横梁底面必须在与腰线平行的同一平面。
猴车知识简介..
2.张紧绞车部分 该部分由手轮1、减速器2、联轴器3、卷筒4、轴承座5和双滑轮6 等组成。张紧小车随时调节行程,防止重锤落地和冲顶。
3.重锤 该部分由配重块1、配重吊架2、钢丝绳3和单滑轮4组成。配重块一 般应设置在线路张力较小的最低点,自然调节运载钢丝绳运行时的张 力变化。 配重块重力应按设计值安装,其配重块应交错排列组装,互相靠紧 ,避免松动。当配重块上下移动或转动时,应防止配重块从吊架上脱 出。
3.1.3重锤下限位保护:
当重锤因牵引钢丝绳的伸长而下降,当下降到离地面200mm时,此 限位保护装置将给控制系统一个限位信号,控制系统将会自动停止运 行,并发出故障报警。同时显示窗口将显示相应的“重锤下限位”, 从而避免了因重锤落地而造成的牵引钢丝绳无张紧力而打滑的现象
。
3.1.4 沿线急停车保护:
3. 猴车保护 3.1 人身安全保护:有九种人身安全保护
3.1.1 机头、机尾越位保护:
由矿用跑偏传感器和吊架组成,当矿工乘坐吊椅上井或下井进入机头 或机尾的禁止越位点时,由越位保护装置给控制系统一个越位的信号 ,控制系统停机并发出故障报警声并停机,同时显示窗口相应的“机 头越位”或“机尾越位”,从而避免乘车人员通过驱动轮或尾轮时越位而 造成的人身伤害。
2.3.2 抱索器
开元公司使用的活动抱索器:适用坡度小于16度,摘挂方便,能配套 使用静态上、下车装置,速度可达到3米/秒
2.4 托(压)绳装置
托绳装置主要由托轮吊架和托(压)绳轮等组成。如下图托绳装置( 单托轮和托压轮)
2.4.1 托(压)绳轮(如下图)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
井下架空乘人装置越位保护装置的研制使用
淄博光正实业有限公司机电科
摘要:目前,井下运行的架空乘人装置(以下称猴车)的越位保护装置多种多样,有机械带动打点器防止越位的,有光电越位开关的,这些越位保护装置有些缺陷,这几种保护安装位置较低,会被人为的解除或机械装置损坏而造成越位保护起不到相应的作用。
为此,我们根据现场的实际情况,研制出一种灵敏可靠又不能人为的解除的越位保护装置。
关键词:架空乘人装置猴车越位开关传感器电气控制综合保护装置
一、设计方案的提出
目前,井下运行的架空乘人装置(以下称猴车)的越位保护装置多种多样,有机械带动打点器防止越位的,有光电越位开关的,这些越位保护装置有些缺陷,这些保护安装位置较低,会被人为的解除或机械装置损坏而造成越位保护起不到相应的作用。
为此,我们根据现场的实际情况,研制出一种灵敏可靠又不能人为的解除的越位保护装置。
二、主要用途
1、保证猴车乘坐人员的安全。
三、越位开关的组成、原理:
1、组成:由固定支架、越位托轮、磁钢、偏心铁块、传感器及相应的电路、低压控制开关等。
2、越位开关的原理:在离猴车机头主动轮及后尾轮前3米左右,各装设一套越位保护装置(装设位置如图所示,图1)。
正常状态下,人员乘坐猴车时,到达正常下车位置,乘人下车,坐椅不会引起钢丝绳下垂,触及不到越位托轮,猴车正常运行;若乘人到达下车点还不能及时下车时,由于重力的作用使钢丝绳下垂,然后带动越位托轮转动,固定在托轮上的磁钢让越位传感器将信号传给猴车综合保护装置,停下猴车控制开关,从而实现越位保护(如图2所示)。
四、研制情况及技术指标:
1、首先我们在现象测量数据,在离距离单托轮800mm的钢丝绳上,挂上50kg的重物,测量钢丝绳(Φ22mm)下垂距离为35mm;在相同的位置挂上一把坐椅,测量钢丝绳下垂小于5mm;再在坐椅一个体重70kg的乘人后,测量钢丝绳下垂距离为45mm。
根据所测量的数值,确定越位托轮的上沿至钢丝绳的距离25mm,越位托轮距单托轮800mm(图3所示),这样既能保证猴车正常运行时,坐椅不会下压钢丝绳下垂,又能保证乘人来不及下车越位时,能及时停下猴车保证人员的安全。
2、越位托轮的位置确定后,在越位托轮的后面固定一磁钢,在另一边固定一偏心铁块,托轮的固定支架上,固定传感器,传感器与磁钢的距离为6mm(如图4所示);偏心铁块的作用一是将磁钢的位置,定于传感器的后方并与之有一相应的角度,越位托轮一有转动,就会使传感器动作,传送信号,让猴车停止运行,还不至于使传感器同磁
钢转到相同位置,造成误动作;二是在乘人越位后能迅速恢复正常位置,为下次越位做好准备。
3、越位开关用于控制电路有两种:
①用于综合保护器时:当乘车人到达下车位置没下车时,钢丝绳在人体重力作用下下压越位托轮,越位托轮转动,固定在托轮的磁钢使支架上的传感器接点闭合,电容C充电,J3得电,J3-1闭合,接通打点信号,信号显示器接收到1点信号,给猴车控制开关断电,猴车停止运行;电容C经1S完成充电,J3释放,信号停,电容经R放电,10S后放电完毕,为下一次越位做准备(电路图如图5所示)。
②用于PLC猴车控制保护器时:将上、越位传感器接入PLC控制中,当乘车人到达下车位置没下车时,钢丝绳在人体重力作用下下压越位托轮,越位托轮转动,固定在托轮的磁钢使支架上的传感器接点闭合,由PLC控制将猴车开关停下,实现越位保护。
五、创新点:
1、利用人体的重力作用,使钢丝绳下垂,能100%的使越位托轮转动,准确、灵活、可靠,保证乘人的安全。
2、设置了偏心铁块,即磁钢与传感器,保持一定的角度,不会产生误动作。
3、电路设计简单,使电气控制更为有效。
六、维修注意事项
1、每天应进行越位试验并做好试验记录。
2、每周对越位装置的固定部位进行紧固。
3、经常对电气部份进行检查检修。
七、安全效益及使用说明
此套越位保护装置使用后,起到了良好效果,由于装设的位置较高,距地面2.3米左右,不会造成人为的损坏,非常灵活可靠,保护了人身的安全,减少了维修量,达到了我们预想的效果。
通过这套越位保护装置的自行设计、安装、使用,我们增长了见识,切身感受到了技术的发展进步和肩负的重大责任。
作者简介:
于亦忠:1986年淄博矿务局技工学校毕业,入淄矿集团石谷煤矿(现光正公司)工作,现任光正公司机电经理兼机电科长。
刘长山:1986年淄博矿务局技工学校毕业,入淄矿集团石谷煤矿(现光正公司)工作,现任光正公司机电副科长。