MPU-6050模块(三轴陀螺仪 + 三轴加速度)
MPU-6050模块

MPU 60501、元件概述三轴陀螺仪:测试角速度的传感器,角速度全格感测范围为+250、+500、+1000 与+2000°/sec (dps ) 当选择量程为+250dps 的时候,将会得到分辨率为131LSB/(°/s )也是就当载体在X+轴转动 1dps ,ADC 将输出131.Mpu6050带有三个陀螺仪,每个陀螺仪负责检测相 应轴的转动速度,也就是检测围绕各个轴转动的速度,像三轴的陀螺仪将同时检测xyz 的旋转。
单纯用陀螺仪(角速度)求出角度,是最简单的方法这个模型的例子是:陀螺仪左转10度,对应鼠标向左移动100的距离。
三轴加速度传感器:是I2C 接口的数字传感器,通过特定命令可以接口的数字传感器,通过特定命令可以配置加速度的量程,并将内部ADC 的转换结果读出来。
的转换结果读出来。
一个片上1024 字节的FIFO ,有助于降低系统功耗。
和所有设备寄存器之间的通信采用400kHz 的I2C 接口接口MPU-6050 使用I2C 或者SPI 接口和芯片连接,并且总是作为从设备。
连接主设备的逻辑电平用VLOGIC 引脚(MPU-6050)。
I2C 的Slave 地址的最低有效位(LSB )用Pin9(AD0)设置。
)设置。
通过I2C 接口读出来的转换结果ADC 值,并不是以度每秒为单位,一般按一下公式进行转换公式进行转换Anglerate=ADCrate/灵敏度灵敏度也就是说,mpu6050检测到模块正以约6度每秒的速度绕X 轴(或者叫YZ 平面上)旋转,ADC 值并不都是正的,请注意,当出现负数时,意味着该设备从现有的正方向相反的方向旋转。
有的正方向相反的方向旋转。
2、功能模块原理图3、元件引脚图以区别多个从这里重点讲解AD0 的作用,I2C 通讯中从机是要有地址的,以区别多个从的寄存器中 机。
当AD0 管脚接低电平的时候,从机地址是0xD0。
从MPU6050 的寄存器中我们可以得到答案,MPU6050 作为一个IIC 从机设备的时候,有8 位地址,高7 位的地址是固定的,就是WHO AM I 寄存器的默认——0x68,最低的一位是本方案中本方案中AD0接 GND的连线决定的。
mpu6050控制舵机

mpu6050控制舵机章节一:引言在航空航天、机器人技术和自动控制领域中,姿态控制是一个重要的问题。
准确测量和控制运动物体的姿态,对于实现精确导航和稳定飞行至关重要。
同时,舵机作为一种常用的执行器,能够通过角度控制来改变物体的姿态。
因此,研究控制舵机的姿态是当前的热点问题之一。
本文以MPU6050陀螺仪加速度计传感器作为姿态测量模块,探讨了使用MPU6050控制舵机的方法。
在此基础上,设计了一个姿态控制系统,可以通过控制舵机来改变物体的姿态。
章节二:MPU6050的原理和性能MPU6050是一种集成了三轴加速度计和三轴陀螺仪的传感器模块。
它可以通过测量物体的加速度和角速度来计算出物体的姿态。
MPU6050工作基于微机电系统(MEMS)技术,通过微小的振动传感器来检测物体的运动。
根据加速度计测量的结果,可以计算出物体在三个方向上的加速度值。
而陀螺仪则是通过测量转动物体的角速度来判断物体的姿态。
MPU6050具有高精度、低功耗和小体积等特点,适用于各种姿态控制应用。
在实际应用中,我们可以使用Arduino等运行在嵌入式平台上的硬件来采集和处理MPU6050的数据。
章节三:MPU6050控制舵机的方法在使用MPU6050控制舵机时,需要进行一系列的数据处理和计算。
首先,通过MPU6050采集到的陀螺仪数据获得物体的角速度。
然后,通过积分计算物体的角度。
接下来,设计一个控制算法来根据目标角度和当前角度的差值来控制舵机的转动。
可以采用比例-积分-微分(PID)控制算法来实现。
最后,将控制的结果输出给舵机,通过改变舵机的角度来调整物体的姿态。
可以使用PWM(脉宽调制)信号来驱动舵机。
章节四:实验结果和讨论本文设计了一个基于MPU6050的姿态控制系统,并进行了实验验证。
首先,通过对MPU6050传感器进行校准,确保获得准确的数据。
然后,采集了不同角度下舵机和MPU6050的数据。
实验结果表明,通过控制舵机的角度,能够有效地改变物体的姿态。
关于MPU6050的一些参数

这两天看了论坛里的关于MPU6050的帖子,自己回家照葫芦画瓢的也做了一些实验,关于如何和实际的姿态矫正联系起来还不太清楚,今天在看手册时,发现了"LSB/g"这个单位,不知道什么意思,后来经过多处查询,知道了这个单位的含义,在这里就作为学习笔记记录下来吧。
以MPU6050加速度测量值为例:当测量范围是±2g时,测量精度是16384L SB/g,这个参数的含义简单说就是当测量的加速值是1g(重力加速度)时,那么加速度的输出就是16384,这也就是为什么在程序中需要对加速度的原始数据除以16384。
那么为什么是16384呢,我们计算一下:16384*2=32768,32768*2=65536=2^16,MPU6050的ADC是16位的,所以不管测量范围多大,最终的输出范围都不会超过65535,所以测量范围越大,精度就越低。
下面计算一下测量范围是±16g时的精度:16*2/65536=0.00048828125,然后取倒数1/0.00048828125=2048,和手册上完全一样。
LSB/g是针对数字输出的传感器而言的。
陀螺仪加速度计MPU6050作者:nieyon g陀螺仪陀螺仪,测量角速度,具有高动态特性,它是一个间接测量角度的器件。
它测量的是角度的导数,即角速度,要将角速度对时间积分才能得到角度。
陀螺仪就是内部有一个陀螺,它的轴由于陀螺效应始终与初始方向平行,这样就可以通过与初始方向的偏差计算出旋转方向和角度。
传感器MPU6050实际上是一个结构非常精密的芯片,内部包含超微小的陀螺。
如果这个世界是理想的,美好的,那我们的问题到此就解决了,从理论上讲只用陀螺仪是可以完成姿态导航的任务的。
基于mpu6050设计陀螺仪模块参数计算
基于mpu6050设计陀螺仪模块参数计算引言1.1 概述本文主要介绍了基于MPU6050设计陀螺仪模块参数计算的方法和步骤。
陀螺仪是一种用于测量角速度和姿态信息的重要传感器,在多个领域具有广泛的应用,如航空航天、导航系统、运动控制等。
由于MPU6050具有高精度、低功耗和小尺寸等特点,成为了设计陀螺仪模块的理想选择。
1.2 文章结构本文共分为五个部分,如下所示:第一部分为引言,介绍概述、文章结构和目的。
第二部分为MPU6050介绍,包括其原理介绍、功能描述以及应用领域。
第三部分为陀螺仪模块设计原理,包括陀螺仪参数计算原理、MPU6050参数与陀螺仪关系说明以及设计过程与方法。
第四部分为参数计算方法与实施步骤,包括基本公式介绍、数据采集与处理流程说明以及参数计算示例和结果展示。
第五部分为结论与展望,总结文章内容并展望模块设计的优化方向和实际应用前景。
1.3 目的本文旨在介绍基于MPU6050设计陀螺仪模块参数计算的方法和步骤,帮助读者了解陀螺仪的原理和应用,并能够根据实际需求进行参数计算和模块设计。
通过本文的阐述,读者可以获取关于陀螺仪模块设计方面的基础知识,并且了解到MPU6050在此领域中的优势和潜力。
最终目的是促进更广泛、更有效地利用陀螺仪技术,推动相关领域的发展和应用创新。
2. MPU6050介绍:2.1 原理介绍:MPU6050是一种常用的六轴陀螺仪加速度计模块,它基于微电子机械系统(MEMS)技术。
它集成了一个三轴陀螺仪和一个三轴加速度计,能够同时测量物体的角速度和线性加速度。
在原理上,MPU6050利用了惯性力原理。
陀螺仪通过测量角速度变化来检测物体的转动情况,而加速度计则通过测量物体的线性加速度来检测物体的直线运动情况。
2.2 功能描述:MPU6050具有多项功能和特点。
首先,它可以提供非常准确的角速度和加速度数据,并且可以进行高精度的传感器校准。
其次,MPU6050可以通过数字接口与微控制器进行通信,实现实时传输数据和控制。
平衡车入门---MPU6050陀螺仪学习
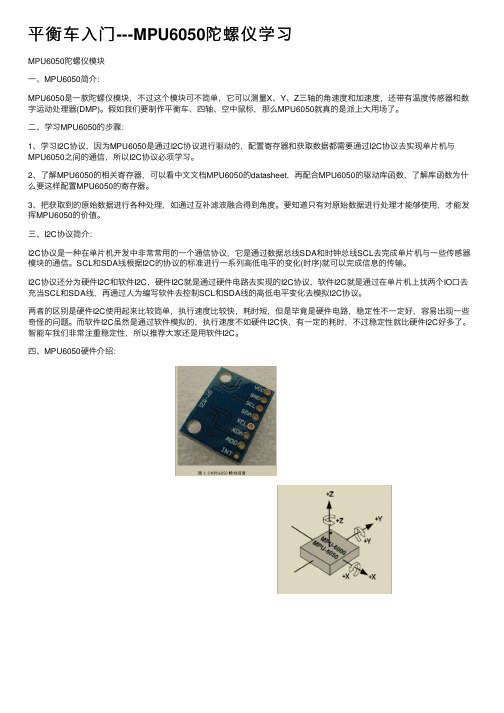
平衡车⼊门---MPU6050陀螺仪学习MPU6050陀螺仪模块⼀、MPU6050简介:MPU6050是⼀款陀螺仪模块,不过这个模块可不简单,它可以测量X、Y、Z三轴的⾓速度和加速度,还带有温度传感器和数字运动处理器(DMP)。
假如我们要制作平衡车、四轴、空中⿏标,那么MPU6050就真的是派上⼤⽤场了。
⼆、学习MPU6050的步骤:1、学习I2C协议,因为MPU6050是通过I2C协议进⾏驱动的,配置寄存器和获取数据都需要通过I2C协议去实现单⽚机与MPU6050之间的通信,所以I2C协议必须学习。
2、了解MPU6050的相关寄存器,可以看中⽂⽂档MPU6050的datasheet,再配合MPU6050的驱动库函数,了解库函数为什么要这样配置MPU6050的寄存器。
3、把获取到的原始数据进⾏各种处理,如通过互补滤波融合得到⾓度。
要知道只有对原始数据进⾏处理才能够使⽤,才能发挥MPU6050的价值。
三、I2C协议简介:I2C协议是⼀种在单⽚机开发中⾮常常⽤的⼀个通信协议,它是通过数据总线SDA和时钟总线SCL去完成单⽚机与⼀些传感器模块的通信。
SCL和SDA线根据I2C的协议的标准进⾏⼀系列⾼低电平的变化(时序)就可以完成信息的传输。
I2C协议还分为硬件I2C和软件I2C,硬件I2C就是通过硬件电路去实现的I2C协议,软件I2C就是通过在单⽚机上找两个IO⼝去充当SCL和SDA线,再通过⼈为编写软件去控制SCL和SDA线的⾼低电平变化去模拟I2C协议。
两者的区别是硬件I2C使⽤起来⽐较简单,执⾏速度⽐较快,耗时短,但是毕竟是硬件电路,稳定性不⼀定好,容易出现⼀些奇怪的问题。
⽽软件I2C虽然是通过软件模拟的,执⾏速度不如硬件I2C快,有⼀定的耗时,不过稳定性就⽐硬件I2C好多了。
智能车我们⾮常注重稳定性,所以推荐⼤家还是⽤软件I2C。
四、MPU6050硬件介绍:我们先来认识下MPU6050的硬件,这是MPU6050模块的图⽚,注意是模块,中间那个才是MPU6050,不过只有MPU6050是不够的,它还需要⼀些外围电路才能正常⼯作,我们可以类⽐⼀下51单⽚机和51单⽚机的最⼩系统的区别。
基于MPU-6050陀螺——加速度仪三轴云台的研究

目前 市 场上 廉价 的云 台两 轴居 多 ,三轴 云 台价 格 比较 昂贵 ,因此 ,研 究使 用 新型 ME MS技 术 的 M P U 一 6 0 5 0陀螺 一 加速 度仪 代替 了 价格 昂贵 的 陀螺 仪 , 为 在航 拍或 在 停 车场 、 海湾、 仓库 等 无人 看 守场 合 的监 控 系 统 提供 一种更 廉 价解 决方 案 , 有着 很 大 的市场 价值 。
1研 究 背 景 和 意 义
在 无人 机上 使 用 固定 云 台安 放 摄像 机 , 摄 像 机会 受 到机 载飞 行 中姿 态变 化 的制 约 , 随机 身 一起 运 动 , 直
接 影 响摄像 机 光轴 抖动 , 从 而 导致 捕 获到 的图像 发 生畸形 或不 清 晰[ 1 1 。 随着无 线 网络 技术 发 展 , 远程 遥 控技 术 广泛 的运 用 在 云 台上 , 在 执行 具 体 的任 务 中 , 接 收 站 可 以根据 特 定 的需 要 , 发 出指 令 调整 云 台旋 转 角度 ,
2 MP U一 6 0 5 0陀 螺 一 加 速 度 仪 的原 理
MP U 一 6 0 5 0是 9轴运 动 处理传 感 器 。它集 成 了基于 微机 电 系统 M E M S ( M i c r o — E l e c t r o
—
Me c h a n i c a l S y s t e m s )技术 的 3轴 陀螺 仪 和 3轴加 速度 计 ,以及 一个 可 扩 展 的数 字运 动 处 理器 D MP ( D i g i t a l
a n g l e n= a n g l en 一 1+( G y r o - C — G y r o )  ̄ a _ G y r o
mpu6050陀螺仪工作原理

mpu6050陀螺仪工作原理
MPU6050陀螺仪工作原理是指MPU6050模块中的陀螺仪如何工作以及它的原理。
MPU6050陀螺仪是一种集成了三轴陀螺仪和三轴加速度计的传感器模块。
MPU6050陀螺仪的工作原理是基于微电机旋转角速度的定向测量以及加速度的检测。
该模块通过测量微电机的转动来检测物体的姿态变化。
具体而言,陀螺仪利用微电机在三个轴上的旋转来检测物体绕这些轴的旋转速度。
MPU6050陀螺仪使用了MEMS(微机电系统)技术,利用微小而高精度的机电系统结构来实现测量。
该传感器模块内部有微小的振动结构,可以感知由物体的旋转引起的振动。
它采用差分电容原理来测量旋转速度,当物体旋转时,微电机产生的离心力导致振动结构发生位移,从而改变了电容的值。
通过测量电容的变化,可以计算出物体的旋转角速度。
除了陀螺仪,MPU6050模块还集成了三轴加速度计。
这些加速度计通过测量物体在三个轴上的加速度来检测物体的线性运动和倾斜角度。
通过结合陀螺仪和加速度计的数据,可以实现更准确的姿态测量。
MPU6050陀螺仪模块通常被应用在飞行器、机器人和智能手机等设备中,用于姿态控制、稳定性控制和运动检测等方面。
其工作原理的理解可以帮助工程师在这些领域中设计和开发更精确、可靠的系统。
总结而言,MPU6050陀螺仪的工作原理基于微电机的转动测量,利用差分电容原理检测旋转角速度。
它的集成设计使其成为一个理想的传感器模块,可广泛用于各种应用中。
mpu6050姿态解算原始数据

MPU6050姿态解算原始数据1. 概述MPU6050是一款集成了三轴陀螺仪和三轴加速度计的惯性测量单元(IMU)。
它能够测量物体的姿态(即旋转角度)和加速度,并通过原始数据进行解算,提供准确的姿态信息。
本文将介绍MPU6050的原始数据和姿态解算的相关概念、原理和实现方法。
2. MPU6050原始数据MPU6050通过三轴陀螺仪和三轴加速度计测量物体的旋转角速度和加速度。
它的输出数据包括以下几个方面:•陀螺仪输出:以角速度(单位为度/秒)表示物体绕X、Y和Z轴的旋转速度。
•加速度计输出:以加速度(单位为m/s²)表示物体在X、Y和Z轴上的加速度。
这些原始数据可以通过I2C或SPI接口从MPU6050读取,并用于姿态解算。
3. 姿态解算原理姿态解算是通过陀螺仪和加速度计的原始数据,计算物体的姿态信息,包括滚动角(Roll)、俯仰角(Pitch)和航向角(Yaw)。
3.1 加速度计原理加速度计通过测量物体在各轴上的加速度,可以得到物体的倾斜角度。
加速度计的原理基于牛顿第二定律,即物体的加速度与受到的力成正比,与物体的质量成反比。
加速度计的输出数据包括X、Y和Z轴上的加速度,我们可以通过以下公式计算物体的倾斜角度:Roll = arctan2(Y, Z) Pitch = arctan2(-X, √(Y² + Z²))其中,arctan2是反正切函数,用于计算倾斜角度。
3.2 陀螺仪原理陀螺仪通过测量物体绕各轴的旋转速度,可以得到物体的旋转角速度。
陀螺仪的原理基于角动量守恒定律,即物体绕某一轴的旋转速度与所受到的力矩成正比,与物体的转动惯量成反比。
陀螺仪的输出数据包括X、Y和Z轴上的角速度,我们可以通过以下公式计算物体的旋转角度:Roll = Roll + (X * Δt) Pitch = Pitch + (Y * Δt) Yaw = Yaw + (Z * Δt)其中,Δt是采样时间间隔,X、Y和Z是陀螺仪的输出数据。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
名称:MPU-6050模块(三轴陀螺仪+ 三轴加速度) 单价:75.00(未税)
使用芯片:MPU-6050
供电电源:3-5v(内部低压差稳压)
通信方式:标准IIC通信协议
芯片内置16bit AD转换器,16位数据输出
陀螺仪范围:±250 500 1000 2000 °/s
加速度范围:±2±4±8±16g
采用沉金PCB,机器焊接工艺保证质量
引脚间距2.54mm
提供原理图,相关数据手册及参考文档
MPU-6000为全球首例整合性6轴运动处理组件,相较于多组件方案,免除了组合陀螺仪与加速器时之轴间差的问题,减少了大量的包装空间。
MPU-6000整合了3轴陀螺仪、3轴加速器,并含可藉由第二个I2C端口连接其他厂牌之加速器、磁力传感器、或其他传感器的数位运动处理(DMP: Digital Motion Processor)硬件加速引擎,由主要I2C端口以单一数据流的形式,向应用端输出完整的9轴融合演算技术
InvenSense的运动处理资料库,可处理运动感测的复杂数据,降低了运动处理运算对操作系统的负荷,并为应用开发提供架构化的API。
MPU-6000的角速度全格感测范围为±250、±500、±1000与±2000°/sec (dps),可准确追緃快速与慢速动作,并且,用户可程式控制的加速器全格感测范围为±2g、±4g±8g与±16g。
产品传输可透过最高至400kHz的I2C或最高达20MHz的SPI。
MPU-6000可在不同电压下工作,VDD供电电压介为2.5V±5%、3.0V±5%或3.3V±5%,逻辑接口VVDIO供电为1.8V±5%。
MPU-6000的包装尺寸4x4x0.9mm(QFN),在业界是革命性的尺寸。
其他的特征包含内建的温度感测器、包含在运作环境中仅有±1%变动的振荡器。
应用
运动感测游戏
现实增强
电子稳像(EIS: Electronic Image Stabilization)
光学稳像(OIS: Optical Image Stabilization)
行人导航器
“零触控”手势用户接口
姿势快捷方式
认证
市场
智能型手机
平板装置设备
手持型游戏产品
3D遥控器
可携式导航设备
特征
以数字输出6轴或9轴的旋转矩阵、四元数(quaternion)、欧拉角格式(Euler Angle forma)的融合演算数据。
具有131 LSBs/°/sec 敏感度与全格感测范围为±250、±500、±1000与±2000°/sec 的3轴角速度感测器(陀螺仪)。
可程式控制,且程式控制范围为±2g、±4g、±8g和±16g的3轴加速器。
移除加速器与陀螺仪轴间敏感度,降低设定给予的影响与感测器的飘移。
数字运动处理(DMP: Digital Motion Processing)引擎可减少复杂的融合演算数据、感测器同步化、姿势感应等的负荷。
运动处理数据库支持Android、Linux与Windows
内建之运作时间偏差与磁力感测器校正演算技术,免除了客户须另外进行校正的需求。
以数位输出的温度传感器
以数位输入的同步引脚(Sync pin)支援视频电子影相稳定技术与GPS
可程式控制的中断(interrupt)支援姿势识别、摇摄、画面放大缩小、滚动、快速下降中断、high-G中断、零动作感应、触击感应、摇动感应功能。
VDD供电电压为2.5V±5%、3.0V±5%、3.3V±5%;VDDIO为1.8V±5%
陀螺仪运作电流:5mA,陀螺仪待命电流:5µA;加速器运作电流:350µA,加速器省电模式电流:20µA@10Hz
高达400kHz快速模式的I2C,或最高至20MHz的SPI串行主机接口(serial host interface)
内建频率产生器在所有温度范围(full temperature range)仅有±1%频率变化。
使用者亲自测试
10,000 g 碰撞容忍度
为可携式产品量身订作的最小最薄包装(4x4x0.9mm QFN)
符合RoHS及环境标准。