基于HCS12的小车智能控制系统设计
智能车教程HCS12 微控制器IO

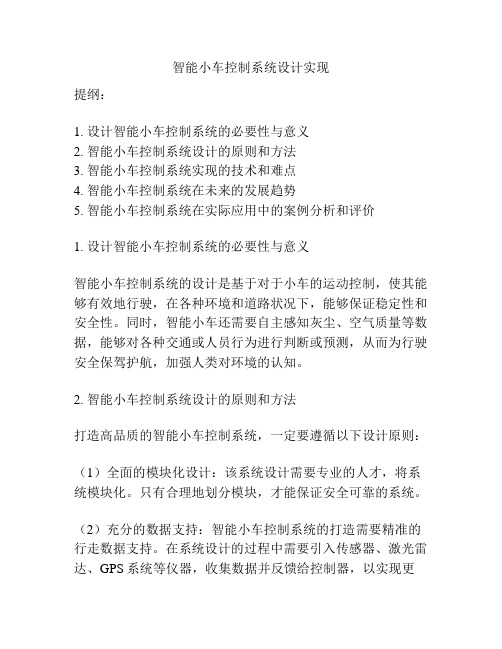
$001C PERP - Port P Pull Device Enable Reg.
PERP x 0 = Pull-up/down disabled 1 = Pull-up/down enabled
$001D PPSP x PPSP - Port P Polarity Select Reg.
0 = Falling edge on pin x sets corresponding PIFP Flag. (Pull-up device connected) 1 = Rising edge on pin x sets corresponding PIFP flag. (Pull-down device connected)
Port Integration Module
Input / Output
Logic Thresholds: High: 0.65 X Vdd = 3,25V Low : 0.35 X Vdd = 1,75V Drive current: Output High: 全功率: 12.5mA at Vdd -.8V 降功率: 1.25mA at Vdd -.8V Output Low: 全功率: -12.5mA at .8V 降功率: -1.25mA at .8V
$0027
J 端口
PTJ - Port J I/O Reg. DDRJ - Port J Direction Reg.
Address Offset $0028 A read returns latched value when configured for output or value at the input pin when when configured as input. Note: If both CAN4 and IIC are enabled, CAN Functionality takes precedence $002A DDRJ x = 0 Pin is Input = 1 Pin is Output
智能车控制系统设计毕业论文

大学毕业设计(论文)任务书专业班级学生姓名一、题目智能车控制系统设计二、起止日期年月日至年月日三、主要任务与要求指导教师职称学院领导签字(盖章)年月日大学毕业设计(论文)评阅人评语题目智能车控制系统设计评阅人职称工作单位年月日河南理工大学毕业设计(论文)评定书题目智能车控制系统设计指导教师职称年月日河南理工大学毕业设计(论文)答辩许可证答辩前向毕业设计答辩委员会(小组)提交了如下资料:1、设计(论文)说明共页2、图纸共张3、指导教师意见共页4、评阅人意见共页经审查,专业班同学所提交的毕业设计(论文),符合学校本科生毕业设计(论文)的相关规定,达到毕业设计(论文)任务书的要求,根据学校教学管理的有关规定,同意参加毕业设计(论文)答辩。
指导教师签字(盖章)年月日根据审查,准予参加答辩.答辩委员会主席(组长)签字(盖章)年月日河南理工大学毕业设计(论文)答辩委员会(小组)决议电气院(系)自动化专业班同学的毕业设计(论文)于年月日进行了答辩。
根据学生所提供的毕业设计(论文)材料、指导教师和评阅人意见以及在答辩过程中学生回答问题的情况,毕业设计(论文)答辩委员会(小组)做出如下决议。
一、毕业设计(论文)的总评语二、毕业设计(论文)的总评成绩:三、答辩组组长签名:答辩组成员签名:答辩委员会主席:签字(盖章)年月日摘要本文主要介绍了智能小车控制系统的软硬件设计及开发过程。
车模系统的简单工作原理是单片机收集红外传感器返回来的赛道信息,通过相应运算后,软件判断其有效性,结合控制算法控制随动舵机给出合理舵值,控制前轮舵机转向,单片机再给出合适的PWM波占空比以控制电机转速。
小车设计主要包括硬件电路设计和软件控制设计两大部分.此智能车系统采用模块化设计思想,完成了系统硬件电路的设计,其主要包括核心控制模块、电源管理模块、电机驱动模块、舵机控制模块、车速检测模块、路径识别模块等。
本系统以16位微处理器MC9S12DG128为控制核心,MC9S12DG128微控制器是M68HCS12系列16位单片机中的一种,其内部结构主要有单片机基本部分和CAN功能块部分组成。
《2024年基于PLC的皮带卸料小车智能控制系统设计》范文

《基于PLC的皮带卸料小车智能控制系统设计》篇一一、引言随着工业自动化程度的不断提高,智能化控制系统的应用日益广泛。
其中,基于PLC(可编程逻辑控制器)的皮带卸料小车智能控制系统在物流、仓储等领域中扮演着重要角色。
本文将详细介绍基于PLC的皮带卸料小车智能控制系统的设计,包括其设计背景、目的和意义。
二、系统设计背景与目的随着工业生产规模的扩大和效率要求的提高,传统的卸料方式已无法满足现代生产需求。
因此,设计一种高效、智能的皮带卸料小车控制系统显得尤为重要。
该系统旨在实现卸料小车的自动化、智能化控制,提高生产效率,降低人工成本,同时保证卸料过程的准确性和安全性。
三、系统设计原理基于PLC的皮带卸料小车智能控制系统以PLC为核心,通过传感器、执行器等设备实现小车的智能化控制。
系统设计原理主要包括以下几个部分:1. 传感器信号采集:通过安装在卸料小车及周围环境的传感器,实时采集小车的位置、速度、负载等数据,为PLC提供控制依据。
2. PLC控制逻辑:PLC根据传感器采集的数据,按照预设的逻辑程序进行计算和分析,输出控制信号。
3. 执行器动作:执行器根据PLC输出的控制信号,驱动卸料小车进行相应的动作,如前进、后退、加速、减速等。
4. 通信接口:系统通过通信接口与上位机进行数据交换,实现远程监控和控制。
四、系统硬件设计系统硬件设计主要包括PLC控制器、传感器、执行器、电源等部分。
其中,PLC控制器是系统的核心,负责接收传感器信号、执行控制逻辑、输出控制信号等任务。
传感器包括位置传感器、速度传感器、负载传感器等,用于实时采集小车的状态数据。
执行器包括电机、电磁阀等,用于驱动小车进行相应的动作。
电源为系统提供稳定的电力供应。
五、系统软件设计系统软件设计主要包括PLC程序设计、上位机监控软件设计等部分。
PLC程序设计是系统的核心,需要根据实际需求编写控制逻辑程序,实现小车的智能化控制。
上位机监控软件用于实时监测小车的状态数据,实现远程监控和控制。
智能小车控制系统设计实现
智能小车控制系统设计实现提纲:1. 设计智能小车控制系统的必要性与意义2. 智能小车控制系统设计的原则和方法3. 智能小车控制系统实现的技术和难点4. 智能小车控制系统在未来的发展趋势5. 智能小车控制系统在实际应用中的案例分析和评价1. 设计智能小车控制系统的必要性与意义智能小车控制系统的设计是基于对于小车的运动控制,使其能够有效地行驶,在各种环境和道路状况下,能够保证稳定性和安全性。
同时,智能小车还需要自主感知灰尘、空气质量等数据,能够对各种交通或人员行为进行判断或预测,从而为行驶安全保驾护航,加强人类对环境的认知。
2. 智能小车控制系统设计的原则和方法打造高品质的智能小车控制系统,一定要遵循以下设计原则:(1)全面的模块化设计:该系统设计需要专业的人才,将系统模块化。
只有合理地划分模块,才能保证安全可靠的系统。
(2)充分的数据支持:智能小车控制系统的打造需要精准的行走数据支持。
在系统设计的过程中需要引入传感器、激光雷达、GPS系统等仪器,收集数据并反馈给控制器,以实现更好的检测和行车控制。
(3)稳定性和可靠性:设计过程中需要在系统中引入错误处理模块,保证系统在出现错误的情况下可以正确处理,从而保证系统的稳定性和可靠性。
(4)简洁和高效:在系统设计中需要保证系统的结构简单,在乱糟糟的交通情况下更容易实现长时间稳定运行。
(5)逐步优化和改进:设计过程中需要不断地优化和改进,跟上前沿的科技发展,提高系统的性能和校准数据。
3. 智能小车控制系统实现的技术和难点智能小车控制系统是一个由传感器、激光雷达、网络通信系统、操作系统、控制算法、安全设计等多个组成部分构成的庞大系统,实现上的难点主要在以下几个方面:(1)多种传感器测试数据的整合和处理,从而精准反馈给控制器让智能小车做出合理的运行决策。
(2)软件计算量的大增量,需要在有限的时间内获得足够的CPU和其他计算性能支持。
(3)为了提高系统的灵活性和可扩展性,整体上采用了优化算法和多策略集合的形式,以保证智能小车可以适合各种复杂的驾驶环境。
智能小车控制系统设计实现

关键词:智能小车;控制系统;设计和实现1智能小车控制系统概述智能小车控制系统是一个综合、复杂的系统,其既有多种技术,也含有嵌入式的软件设备和硬件设备、图像识别、自动控制和电力传动、机械结构等技术知识,智能小车的控制系统主要是围绕嵌入式控制系统进行的,将其作为操控的中心,并借助计算机系统,最终完成自动造作和控制的过程[1]。
智能小车的控制系统流程图见图1所示。
2智能小车的设计和实现2.1智能小车的硬件设计硬件设计是保证智能小车平稳运行的必要条件,它关系着控制系统的精度和稳定性,因此在设计时需要用在模块化设计思想,该研究是通过采取硬件系统K60芯片作为核心控制器,并通过图像采集模块和电机、舵机驱动模块、测速模块、电源模块等组成硬件设计系统图,见图2。
首先,电源电路设计,该设计时智能小车的动力来源,为小车运行提供不断的电力,一般采取7.3V、容量为2000mAh的可充电型的镍铬电池作为电源,但是其不能直接为控制器传输电力,需要在转变电路后才可以进行传输。
转变电路可以保证控制器直接对电池内的电压进行调节,保证不同模块可以正常工作和运行,智能小车主要是依靠控制电力和电机驱动进行转变的。
其次是K60最小系统板,在设计时需要将K60的管脚部分做成最小系统的单独电路板,这样可以简化电路板的设计,促使调试更加顺利,K60系统板主要由K60芯片、复位电路、时钟电路、JTAG下载电路、电源滤波电路组成。
再其次是电机驱动电路,该电路是在集成芯片的驱动下进行的,可以为控制器更其他模块提供较大的电流最终集成电机驱动芯片,但是要特别注意这部分因为在电机驱动过程中有较大的分功率,会导致小车在进行调试时因为过大的电流导致小车电路发生堵塞现象,而使小车电路被烧毁,因此需要设计者避免这种现象,可以将驱动电路做成驱动板[2]。
最后是舵机接口电路。
在智能小车设计中,舵机主要保证小车可以顺利转向,因此舵机的运行电压、转向动作、转向速度都是需要考虑的因素,一般选择舵机时主要选择Futaba3010,选择供电电压为6V。
FreeScale_HCS12系列单片机教程(dg128)

HCS12微控制器系列教程---第一讲:PWM 模块介绍该教程以MC9S12DG128单片机为核心进行讲解,全面阐释该16位单片机资源。
本文为第一讲,开始介绍S12 MCU的PWM模块。
PWM 调制波有8 个输出通道,每一个输出通道都可以独立的进行输出。
每一个输出通道都有一,一个周期控制寄存器和两个可供选择的时钟源。
每一个PWM 输出个精确的计数器(计算脉冲的个数)通道都能调制出占空比从0—100% 变化的波形。
PWM 的主要特点有:1、它有8 个独立的输出通道,并且通过编程可控制其输出波形的周期。
2、每一个输出通道都有一个精确的计数器。
3、每一个通道的PWM 输出使能都可以由编程来控制。
4、PWM输出波形的翻转控制可以通过编程来实现。
5、周期和脉宽可以被双缓冲。
当通道关闭或PWM计数器为0时,改变周期和脉宽才起作用。
6、8 字节或16 字节的通道协议。
,他们提供了一个宽范围的时钟频率。
7、有4 个时钟源可供选择(A、SA、B、SB)8、通过编程可以实现希望的时钟周期。
9、具有遇到紧急情况关闭程序的功能。
10、每一个通道都可以通过编程实现左对齐输出还是居中对齐输出。
HCS12微控制器系列教程---第二讲:PWM 寄存器简介1、PWM启动寄存器PWMEPWME 寄存器每一位如图1所示:复位默认值:0000 0000B图1 PWME 寄存器每一个PWM 的输出通道都有一个使能位PWMEx 。
它相当于一个开关,用来启动和关闭相应通道的PWM 波形输出。
当任意的PWMEx 位置1,则相关的PWM输出通道就立刻可用。
用法:PWME7=1 --- 通道7 可对外输出波形PWME7=0 --- 通道7 不能对外输出波形注意:在通道使能后所输出的第一个波形可能是不规则的。
当输出通道工作在串联模式时(PWMCTL寄存器中的CONxx置1),那么)使能相应的16位PWM 输出通道是由PWMEx的高位控制的,例如:设置PWMCTL_CON01 = 1,通道0、1级联,形成一个16位PWM 通道,由通道1 的使能位控制PWM 的输出。
《2024年基于PLC的皮带卸料小车智能控制系统设计》范文
《基于PLC的皮带卸料小车智能控制系统设计》篇一一、引言随着工业自动化程度的不断提高,智能控制系统在生产线上扮演着越来越重要的角色。
其中,基于PLC(可编程逻辑控制器)的皮带卸料小车智能控制系统是现代工业自动化领域中的一项重要技术。
本文将详细介绍基于PLC的皮带卸料小车智能控制系统的设计,旨在提高生产效率、降低成本和增强系统的可靠性。
二、系统设计需求分析在系统设计阶段,首先需要对皮带卸料小车的功能需求进行分析。
皮带卸料小车主要用于在生产线上的特定位置卸载物料,其工作过程需要与皮带输送系统紧密配合。
因此,系统设计需求包括:1. 精准定位:小车需根据指令精准移动到指定位置进行卸料。
2. 高速响应:系统应具备快速响应的能力,以适应生产线的节奏。
3. 安全性:确保在卸料过程中小车和操作人员的安全。
4. 可靠性:系统应具备高可靠性,以降低维护成本和生产中断的风险。
三、硬件设计硬件设计是系统设计的基础,主要包括PLC控制器、传感器、执行器和小车驱动装置等部分。
1. PLC控制器:选用高性能的PLC控制器,负责接收上位机的指令,控制小车的运动和传感器数据的处理。
2. 传感器:包括位置传感器、速度传感器和安全传感器等,用于监测小车的状态和周围环境,为PLC控制器提供数据支持。
3. 执行器:包括电机驱动器和小车运动机构,根据PLC控制器的指令驱动小车进行移动和卸料。
4. 小车驱动装置:选用适合的电机和减速器,确保小车在不同工况下都能稳定运行。
四、软件设计软件设计是系统的核心部分,主要包括PLC编程和控制算法的设计。
1. PLC编程:使用专业的编程软件,编写符合系统需求的程序。
程序应具备高可靠性、易维护性和良好的扩展性。
2. 控制算法设计:根据小车的运动特性和生产线的需求,设计合适的控制算法,如PID控制算法等,以实现小车的精准定位和高速响应。
五、系统实现与测试系统实现与测试是验证系统设计是否满足需求的关键步骤。
1. 系统实现:根据硬件和软件设计,完成系统的搭建和调试。
基于CCD图像识别的HCS12单片机智能车控制系统_刘建刚
光电 技术 应用
ELECT R O- OPT IC T ECHN OL OGY A PPL ICA T ION
Vol. 22, No. 6 December . 2007
文章编号: 1673- 1255( 2007) 06- 0052- 04
基于 CCD 图像识别的 H CS12 单片机智能车控制系统
的光电传感器识别路径方案, 该摄像头传感器 可以获取更多的路径信息, 使智能 车按任意 给定的黑色 引导线更 能以较快的 速
度平稳地运行.
关键词: 图像识别; 智能车; HCS12 单片机; CCD
中图分类号: TP212. 9
文献标识码: A
Design of Smartcar. s HCS12 MCU Control System Based on CCD Image Recognition
1 检测前瞻距离远 2 检测范围宽
3 检测道路参数多 4 占用 M CU 端口 资源少
1 电路相对设计复杂 2 检测信息更新速度慢 3 软件处理数据较多
2 主要电路模块设计
2. 1 CCD 路径识别电路
摄像 头的 主要 工作 原理 是[ 2] : 按一 定 的分 辨 率, 以隔行扫描的方式采样图像上的点, 当扫描到某 点时, 就通过图像传感芯片将该点处图像的灰度转 换成与灰度成一一对应关系的电压值, 然后将此电 压值通过视频信号端输出. 具体参见图 1. 当摄像头 扫描完一行, 视频信号端就输出有一个电压/ 凹槽0, 并保持一段时间, 此/ 凹槽0叫做行同步脉冲, 它是扫 描换行的标志. 然后, 跳过一行后, 开始扫描新的一 行, 如此下去, 直到扫描完该场的视频信号, 接着就 会出现一段场消隐区. 在这若干个消隐脉冲中, 有个 脉冲远宽于其他的消隐脉冲, 该消隐脉冲即称为场 同步脉冲, 它是扫描换 场的标志. 摄像头每秒 扫描 25 幅图像, 每幅又分奇、偶 2 场, 先奇场后偶场, 故 每秒扫描 50 场图像. 即扫描周期为 20 ms.
智能汽车的控制系统设计与实现
智能汽车的控制系统设计与实现随着科技的不断发展,汽车已从传统的机械式控制逐渐向智能化控制转型。
智能汽车的控制系统,不仅具有高效的驾驶安全性能,而且能够适应各种复杂情境下的自主驾驶。
本文将从“智能汽车的控制系统”入手,探讨智能汽车的控制系统设计与实现。
一、智能汽车的控制系统智能汽车的控制系统是实现智能驾驶的核心组成部分,它负责实现车辆感知、决策和执行驾驶操作的任务。
目前,智能汽车的控制系统技术主要包括传感技术、决策制导技术、控制技术和信息交互技术等。
1.传感技术传感技术是智能汽车控制系统的基础,它通过一系列感知器件实时采集车辆周边环境信息,包括车道线、标志、车辆、行人、障碍物、气象等信息。
传感器种类繁多,如激光雷达、摄像头、毫米波雷达、超声波等等。
每种传感器都有自己的特点和应用场景,比如激光雷达能够获取高精度的三维场景信息,而摄像头则能够获取更加清晰的图像信息。
通过将这些信息进行处理和分析,可以实现对车辆周边环境的感知。
2.决策制导技术决策制导技术是智能汽车控制系统的关键技术,它通过分析车辆周边环境信息,确定车辆的行驶路线和驾驶策略,并在实际驾驶过程中做出实时的决策,确保车辆的安全和舒适性。
目前,常用的决策制导技术包括路径规划、轨迹规划、障碍物避难等。
3.控制技术控制技术是智能汽车控制系统的实现手段,它通过操纵车辆的动力系统、制动系统和转向系统等,调整车辆的速度、方向和位置,实现对车辆的精确控制。
制动系统和转向系统的控制较为简单,而动力系统的控制则涉及多种因素,如引擎功率、变速器齿比、电池状态等。
智能汽车的动力控制一般采用电动化技术,包括电池电机、超级电容器等。
4.信息交互技术信息交互技术是智能汽车与外部环境进行交互的手段,它通过将车内的信息传递给外部环境,或者将外部环境的信息传递给车内系统,实现车辆与道路、其他车辆和行人的智能连接。
信息交互技术包括无线通信技术和车联网技术,能够为车辆提供实时的道路状况、交通流量等信息,提高行驶安全性能。
自制 智能小车控制器毕业设计论文
智能小车控制器摘要智能车辆是当今车辆工程领域研究的前沿,它体现了车辆工程、人工智能、自动控制、计算机等多个学科领域理论技术的交叉和综合,是未来汽车发展的趋势。
本文是在第二届“飞思卡尔”杯全国大学生智能汽车竞赛背景下诞生的,介绍了基于Freescale的MC9S12DG128芯片开发的智能小车硬件系统。
本设计的智能小车运行在带黑色引导线的白色跑道上,具有自动识别路径及安全运行的功能。
这篇文章着重阐述了目标道路信息的获取、处理和识别过程,并在此基础上结合软件设计运用有效的控制算法对智能小车进行控制,使小车能够快速准确的对道路进行跟踪。
目标道路信息的获取是通过TCRT5000红外传感器来进行,其主要任务是通过扫描获得道路信息,并将是该信号传递给单片机进行处理。
该课题主要设计了以单片机为主的硬件电路,本文详细叙述了轨迹跟踪系统的载体构造、控制系统的总体设计、驱动芯片的选型等。
关键词:智能小车;路径识别;红外传感器;MC9S12DG128目录第一章绪论 (1)1.1 引言 (1)1.2 研究背景 (1)1.2.1 红外图像采集与处理技术的发展现状 (2)1.2.2 智能车路径跟踪技术及其发展 (3)1.2.3 小车智能控制技术的发展 (5)1.3 研究现状与意义 (6)1.4 本文主要研究内容和章节安排 (7)第二章智能小车控制器概述 (9)2.1 智能小车控制器硬件电路总述 (9)2.2 智能小车控制器软件设计简述 (10)第三章控制器硬件电路设计 (12)3.1 电源模块设计 (12)3.1.1 5V电压模块设计 (13)3.1.2 6V电压模块设计 (14)3.2 路径探测模块设计 (15)3.2.1 传感器选型 (17)3.2.2传感器布局 (17)3.2.3 传感器间隔距离确定 (18)3.2.4 径向探出距离的设计 (18)3.2.5 探测模块控制电路设计 (19)3.3 速度检测模块的设计 (20)3.4 MC9S12DG128单片机简介 (22)3.4.1 MC9S12DG128的结构 (22)3.4.2 MC9S12DG128引脚结构及功能介绍 (25)3.4.3 单片机MC9S12DG128最小系统设计 (28)3.5 舵机驱动模块设计 (32)3.6 后轮电机驱动模块设计 (32)3.6.1 驱动电机介绍 (32)3.6.2 电机驱动控制设计 (34)3.7 系统抗干扰设计 (36)3.7.1 干扰的产生原因 (37)3.7.2 抗干扰措施 (37)第四章总结和展望 (38)4.1 总结 (38)4.2 展望 (38)致谢 (40)参考文献 (41)附录A:英文资料 (42)附录B:英文资料翻译 (55)附录C:硬件系统原理图 (63)附录D:硬件系统PCB图 (64)附录E:元器件清单 (65)第一章绪论1.1引言大学生智能汽车竞赛源自韩国,在韩国已经成功举办了五届。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于HCS12的小车智能控制系统设计,智能车,HCS12,单片机,红外光电传感器
2007-10-01 21:01
智能车系统以迅猛发展的汽车电子为背景,涵盖了控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科;主要由路径识别、角度控制及车速控制等功能模块组成。
一般而言,智能车系统要求小车在白色的场地上,通过控制小车的转向角和车速,使小车能自动地沿着一条任意给定的黑色带状引导线行驶。
笔者基于HCS12单片机设计了一种智能车系统。
硬件系统中的路径识别功能由红外光电传感器实现,车速控制由模糊控制器进行调节。
软件设计中实时检测路况,并定时中断采集速度反馈值。
1 系统分析及控制方案
1.1 智能车系统分析
智能车系统根据检测到的路况和车速的当前信息,控制转向舵机和直流驱动电机,相应地调整小车的行驶方向和速度;最终的目的是使智能车能快速、稳定地按给定的黑色引导线行驶。
小车在行驶过程中会遇到以下两种路况:①当小车由直道高速进入弯道时,转角方向和车速应根据弯道的曲率迅速做出相应的改变,原则是弯道曲率越大则方向变化角度越大,车速越低。
②当小车遇到十字交叉路段或是脱离轨迹等特殊情况时,智能车应当保持与上次正常情况一致的方向行驶,速度则相应降低。
因此,对智能车的设计,要求具有实时路径检测功能和良好的调速功能。
1.2 控制方案的设计
系统的控制分为小车转向角控制和速度控制两部分。
小车转向角的控制通过输入PWM信号进行开环控制。
根据检测的不同路径,判断出小车所在位置,按不同的区间给出不同的舵机PWM控制信号,小车转过相应的角度。
考虑到实际舵机的转向角与所给PWM信号的占空比基本成线性关系,所以舵机的控制方案采用查表法。
在程序中预先创建控制表,路径识别单元检测当前的路况,单片机通过查表可知当前的赛道,然后给出相应的PWM信号控制舵机转向。
本设计采用了一种参数自整定的模糊控制算法对小车速度进行闭环控制。
小车在前进过程中,根据不同的路况给出不同的速度给定值,通过模糊控制器进行速度调节,以缩短小车的速度控制响应时问,减小稳态误差。
系统将小车的角度变化率反馈给模糊控制器,通过修正规则进行模糊参数的自整定。
智能车自动控制系统结构框图如图1所示,图中dt表示小车角度的微分环节,θ表示输出的转角,n*表示速度的设定值,n表示实际速度反馈值。
2 硬件结构与方案设计
系统硬件主要由HCSl2控制核心、电源管理单元、路径识别单元、角度控制单元和车速控制单元组成,其结构框图如图2所示。
(图2 暂缺)
2.1 HCSl2控制核心
系统的核心控制采用飞思卡尔半导体公司的16位HCS12系列单片机MC9S12DGl28。
其主要特点是高度的功能集成,易于扩展,低电压检测复位功能,看门狗计数器,低电压低功耗,自带
PWM输出功能等。
系统I/O口具体分配如下:PORTA0、PTH0~PTH7共9位用于小车前面路径识别的输人口;PACN0用于车速检测的输入口;PORTB0~PORTB7用于显示小车的各种性能参数;PWM01用于伺服舵机的PWM控制信号输出;PWM23、PWM45用于驱动电机的PWM控制信号输出。
2.2 电源管理单元
电源管理单元是系统硬件设计中的一个重要组成单元。
本系统采用7.2 V、2 000 mAh、Ni-Cd 蓄电池供电。
为满足系统各单元正常工作的需要,系统将电压值分为5 V、6.5 V和7.2 V三个档。
三个电压档的具体实现及其功能如下:
①采用稳压管芯片L7805CV将电源电压稳压到5 V,稳压电路如图3所示,给单片机系统电路、路径识别的光电传感器电路、车速检测的旋转编码器电路和驱动芯片MC33886电路供电;
②将电源电压7.2 V经过一个二极管降至6.5 V左右后给舵机供电;
③将电源电压7.2 V直接供给直流驱动电机。
(图3暂缺)
2.3 路径识别单元
为提高小车转向角的控制精度,系统路径识别单元采用9个发射和接收一体的反射式红外光电传感器JY043作为路径检测元件。
红外线具有极强的反射能力,应用广泛,采用专用的红外发射管和接收管可以有效地防止周围可见光的干扰,提高系统的抗干扰能力。
对于小车循迹场地的黑白两种颜色,发射管发出同样的光强,接收管接收到的光强不同,因此输出的电压值也不同;给定一个基准电压,通过对不同输出电压值进行比较,则电路的输出为高低电平。
当检测到黑白线时分别输出为高低电平,这样不仅系统硬件电路简单,而且信号处理速度快。
其路径检测硬件电路如图4所示。
2.4 角度控制单元
系统角度控制单元采用Sanwa公司SRM-102型舵机作为小车方向控制元件。
在实际运行过程中,舵机的输出转角与给定的PWM信号值成线性关系,以PWM信号为系统输入信号,实现舵机开环控制。
舵机响应曲线和控制电路如图5、图6所示。
由于舵机的开环转向力矩足够,单片机通过采集的当前路况,给定PWM控制信号,从而实现舵机的转向,具体的舵机转向角与路径识别单元输出值的关系如表1所列。
2.5 车速控制单元
车速控制单元采用RS-380SH型直流电机对小车速度进行闭环控制,并用MC33886电机驱动H-桥芯片作为电机的驱动元件。
车速检测元件则采用日本Nemicon公司的E40S-600-3-3型旋转编码器,其精度达到车轮每旋转一周,旋转编码器产生600个脉冲。
系统通过MC9S12DG128输出的PWM信号来控制直流驱动电机。
考虑到智能车由直道高速进入弯道时需要急速降速。
通过实验证明:当采用MC33886的半桥驱动时,在小车需要减速时只能通过自由停车实现。
当小车速度值由80降至50时(取旋转编码器在一定采样时间内检测到的脉冲数作为系统速度的量纲),响应时间约为0.3 s,调节效果不佳;当采用MC33886的全桥驱动时,其响应时间约为0.1 s。
因此系统利用MC33886的全桥结构,实现了小车的快速制动。
其电机驱动电路如图7所示。
VCC为电源电压7.2 V,IN1和IN2分别为MC33886的PWM 信号输入端口。
MC33886的输出端口OUT1和OUT2分别接驱动电机的两端。
D1、D2为芯片的使能端。
3 软件流程设计
本智能车系统的软件没计基于MetrowerksCodeWarrior CWl2 V3.1编程环境,使用C语言实现。
整个系统软件开发、制作、安装、调试都在此环境下实现。
系统软件设计由以下几个模块组成:单片机初始化模块,实时路径检测模块,舵机控制模块,驱动电机控制模块冲断速度采集模块和速度模糊控制模块。
系统软件流程如图8所示。
4 实验
对小车循迹功能实验是通过控制舵机的转向角实现的,而对车速控制功能,则进行了传统模糊控制与参数自整定模糊控制的对比实验。
⑴小车循迹功能实验
系统通过采集到当前路况,对舵机的转向角进行控制来实现小车的循迹功能。
在舵机工作电压6.5 V情况下,输入的PWM信号与舵机输出的转角一一对应。
实验测得,舵机角度从左转—45°至右转45°对应的输入PWM信号范围为131~165。
具体的舵机转角与PWM对应关系如表2所列,实验测得小车运行轨迹平滑,循迹图如图9所示。
图中细线为任意给定的黑色引导线,粗线为小车循迹所行驶的曲线。
(2) 小车速度控制功能实验
在小车给定的三档速度情况下,对小车速度进行传统模糊控制与参数自整定的对比实验。
具体车速控制曲线如图10所示。
图中纵轴为采样周期(T=0.01 s)的车速检测元件检测到的脉冲数,横轴为采样周期的整倍数。
曲线1为速度设定值,曲线2为传统模糊控制响应曲线,曲线3为采用参数自整定模糊控制响应曲线。
由小车的速度控制曲线可知,采用传统模糊控制用于智能车系统时,响应时间太长,且调节过程中会产生较大幅度的振荡;当采用带参数自整定的模糊控制算法后,小车在减速时能在较小的振幅范围内快速调节到设定值,从而保证了小车的平稳过渡且不影响整体速度。
5 结论
通过对小车进行转向角度和车速控制实验证明:小车能平稳地按照任意给定的黑色引导线行驶,循迹效果良好,速度控制响应快,动态性能良好,稳态误差较小,系统的稳定性和抗干扰能力强。