关于非对称缸液压跃变问题的分析
两非对称液压缸同步举升系统的自适应跟踪控制

两非对称液压缸同步举升系统的自适应跟踪控制窦海斌【摘要】针对由两个非对称液压缸组成的电液伺服同步举升系统,首先建立了该系统的非线性耦合模型,并在该模型的基础上设计出一种鲁棒自适应跟踪控制器.该控制器利用多变量后推设计方法实现了液压缸对目标轨迹的跟踪控制以及同步控制,并结合参数自适应律解决系统中某些参数的不确定性问题.整个控制律的设计过程通过Lyapunov函数方法保证系统的稳定性.为验证该控制律,使用AMESim软件构建两非对称液压缸同步举升系统仿真模型,仿真结果验证了提出方法的有效性.%This study presents a novel method to address the synchronization motion issue of lift system with two asymmetric hydraulic cylinders.The nonlinear coupling models are derived first.Based on these models,an adaptive tracking controller is proposed.In this controller,a multi-variable backstepping method is used to realize the position tracking and the synchronization control of two hydraulic cylinders,and an adaptive law is used to help compensate the effect of parameter uncertainty on the system.The stability of the whole system is guaranteed by the Lyapunov function method.A simulation developed by AMESim is used to demonstrate that the proposed controller is effective.【期刊名称】《液压与气动》【年(卷),期】2017(000)012【总页数】8页(P82-89)【关键词】两缸同步;后推控制;AMESim仿真【作者】窦海斌【作者单位】滨州学院机电工程学院,山东滨州256600【正文语种】中文【中图分类】TH137;TP273多缸同步电液伺服系统广泛应用于冶金、军事、机械制造等领域中的重型负载提升和推拉场合[1]。
非对称液压缸的动态特性仿真研究_郝前华

第 6期
郝前华等 :非 对称液压缸的动态特性仿真研究
9 87
由铲斗自重 通过 连杆 传 递到 活塞 杆上 的 负载 力 FL′。 该 负 载力 FL′与铲 斗液 压 缸瞬 时 长度 L有 关 [ 10] 。 为简化分析 , 假设在时间 t=0时 , 对液压缸输入一阶跃负载力 FL =2 500 N, 同时输入一阶跃 流量 Q1 =110 L/min。
第 6期
郝前华等 :非 对称液压缸的动态特性仿真研究
9 85
现加速或减速的瞬态过程 。非对称液压缸的动态特性分析就是对这一瞬态过程中的输出压力和活塞运 动速度变化进行分析 [ 4] 。对液压系统的动态特性 , 国内有很多学者做了研究 。罗艳蕾 [ 5] 对液压节流调 速系统动态特性进行了仿真 , 崔昊等 [ 6] 对一开关型阀控液压缸进行了仿真与优化 , 史显忠等 [ 7] 对由对
根据式 (7)、(8)可求得外负载和流量单作用下液压缸活塞的速度 , 根据式 (9)、(10)可求得外负载 和流量单作用下液压缸工作腔的输出压力 。在外负载和流量的共同作用下 , 由叠加原理可知 , 液压缸的 输出压力和速度是它们单独作用于液压缸所引起的输出之和 。
根据式 (5)、(6)和图 2非对称液压缸方框图 , 在 MATLAB软件中建立铲斗液压缸仿真模块图 , 如图 3所示 。
质量 (kg);u为非对称液压缸活塞运动速度 (m/s);B为
粘性阻尼系数 (N· s/m);FL为负载力 (N)。 非对称液压缸工作腔的流量连续方程 [ 4]
图 1 非对称液压缸 ——— 负载系统 Fig.1 Theloadedsystem ofasymmetrical
Q1 =A1 u+CiP1 +Vβe1 ddPt1 ,
非对称泵控单出杆液压缸实验方法研究
非对称泵控单出杆液压缸实验方法研究王爱红;韦关龙;刘等卓;吕振峰;成杰【摘要】非对称泵是一种可平衡单出杆液压缸有杆腔和无杆腔不对称流量的新型高效节能元件,对消除或减少液压系统能量损失具有显著效果,故需要在现有研究基础上从原理、功能及使用等方面不断完善改进,以便于投入到工程应用中.由于非对称泵结构的特殊性,进行泵控单出杆液压缸台架实验设计是非对称泵在液压回路中使用的基础性研究.实验回路中,非对称泵A油口接单出杆液压缸有杆腔、B油口接单出杆液压缸无杆腔、C油口接蓄能器、利用DSpace控制非对称泵斜盘倾角,达到变量控制液压缸.理论和实验表明,非对称泵可以有效匹配单出杆液压缸有杆腔和无杆腔不对称流量,实现非对称泵控单出杆液压缸的有效节能控制.【期刊名称】《太原科技大学学报》【年(卷),期】2017(038)006【总页数】5页(P440-444)【关键词】非对称变量泵;单出杆液压缸;斜盘倾角;DSPACE【作者】王爱红;韦关龙;刘等卓;吕振峰;成杰【作者单位】太原科技大学机械工程学院,太原030024;太原科技大学机械工程学院,太原030024;太原科技大学机械工程学院,太原030024;太原科技大学机械工程学院,太原030024;太原科技大学机械工程学院,太原030024【正文语种】中文【中图分类】TH322负载敏感控制系统当几个执行器同时工作,只有压力最高的负载效率较高,其他负载用压差补偿会产生较大的节流损失[1]。
为了消除阀控系统的节流损失,原德国汉堡工业大学Monika教授在1998年提出将全泵控技术用于工程车辆上,以变量泵/马达为控制元件消除节流损失、实现能量回收利用[2]。
实验表明在轮式装载机上采用泵控差动缸液压系统,燃油消耗量可降低15~25%[3],挖掘机采用泵控技术,可降低燃油消耗49% [4].国外Rexroth公司、美国Vickers公司、德国Aachen工业大学液压研究所、普渡大学、Hamburg工业大学等 [5-7],国内哈尔滨工业大学、北京航空航天大学、太原理工大学等对泵控技术都进行了相关研究[8-11]。
非对称换向阀在液压缸传动系统中的应用

关键词: 液 压缸 ; 非 对称换 向阀 ; 节能; 压 力 损 失
中图分 类号 : U4 1 5 . 5
文 献标 志码 : B
App l i c a t i o n o f As y mm e t r i c Re v e r s i ng Va l v e i n Hy d r a u l i c
0 引 言
2 O世纪 6 O年代 以 来 , 工 程 机 械 越 来 越 多 地 采
和非对 称液 压缸 两种 型式 , 如图 1 所示。
用 液压 传 动技术 来 降 低 机 械结 构 布 置 难 度 , 改 善 性
能和提 高 自动化 操作 程度 。换 向阀控 制 的液 压 缸系 统 是工 程 机械 中最 常 用 的 液压 系统 之 一 , 换 向 阀在 液 压 系统 中 的主要作 用在 于 改变液 压 油缸 的液压 油 进 出 口流 向 , 控 制 液 压缸 的运 动 方 向。带 有 比例 控 制 功能 的换 向阀还能 够对 液压 缸 的运动 速度 进行 控
( b)
控 非 对 称 液 压 缸 系 统
图 1 阀控 液 压 缸 系 统 结 构
对 称液压 缸 活塞 两 侧 均 设 有 活塞 杆 , 两腔 有 效 作用 面 积相 等 。活塞 运 动 时 , 液 压 缸 的进 油流 量 与 回油流 量相 等 , 系统选 用 的普通换 向阀 , 在 通流 直径 满 足最 大流量 要求 的情 况 下 即 能正 常工 作 , 且 能 量
Ab s t r a c t :To d e a l wi t h po we r l o s s a n d he a t i n g o f hyd r a ul i c c yl i n de r d r i v e s ys t e m ,t he i nf l u e n c e o f hy d r a ul i c c yl i n de r ' s s pe e d r a t i o o n s ys t e m p e r f o r ma nc e,i n c l ud i ng t he v e l o c i t y,e n t r a nc e a n d e xi t f l ow a n d pr e s s u r e l os s of r e v e r s i ng va l v e wa s s t u di e d.As y m me t r i c r e v e r s i ng va l v e i s a dv i s e d t o be u s e d i n h yd r a ul i c c yl i nd e r s ys t e m ,i n o r de r t o r e d uc e t he p r e s s u r e l o s s o f hy d r a ul i c c y l i nd e r whe n wi t hd r a wi ng,i n c r e a s e dr i v i n g e f f i c i e nc y a n d d e c r e a s e he a t i n g. Ke y wo r d s:hy dr a u l i c c y l i nd e r ;a s y mm e t r i c r e ve r s i n g v a l ve;e n e r g y s a vi n g;pr e s s u r e l os s
泵控非对称液压缸系统高精度位置控制方法

泵控非对称液压缸系统高精度位置控制方法王玄;陶建峰;张峰榕;吴亚瑾;刘成良【期刊名称】《浙江大学学报(工学版)》【年(卷),期】2016(050)004【摘要】针对已开发的单向比例泵控非对称液压缸系统实验平台,为了实现该类系统的无超调位置控制,通过分析系统的工作原理及特性,基于系统的流量连续性方程和力平衡方程,提出采用带约束的三阶状态空间模型来描述单向比例泵控非对称液压缸系统的方法.基于模型预测控制理论和QPhild二次优化算法,设计适用于该模型的模型预测控制器来保证系统的无超调位置输出.实验结果表明,运用模型预测方法能够避免换向阀切换引入的系统非线性,有效地解决泵控非对称液压缸系统的超调问题,实现多约束条件下的高精度位置控制.【总页数】6页(P597-602)【作者】王玄;陶建峰;张峰榕;吴亚瑾;刘成良【作者单位】上海交通大学机械与动力工程学院,上海200240;上海交通大学机械与动力工程学院,上海200240;上海交通大学机械与动力工程学院,上海200240;上海交通大学机械与动力工程学院,上海200240;上海交通大学机械与动力工程学院,上海200240【正文语种】中文【中图分类】TH137;TP271【相关文献】1.非对称液压缸伺服泵控系统控制模型及其参数辨识研究 [J], 徐坤;朱灯林;梅志千;陈成2.泵控非对称液压缸系统能效特性对比研究 [J], 王波;李运华;赵斌;葛磊;权龙3.非对称泵控单出杆液压缸系统特性分析 [J], 马艳斌;赵斌;郝云晓4.泵控非对称液压位置系统自适应Backstepping控制 [J], 许文斌;曾乐5.基于预测控制的单向比例泵控非对称液压缸系统控制方法 [J], 王玄;陶建峰;张峰榕;吴亚瑾;刘成良因版权原因,仅展示原文概要,查看原文内容请购买。
非对称缸电液伺服系统分析和设计

有杆腔:
哈工大电液所 IEST Lihr@
15
15
10 p 1'
10
p1
P1(MPa)
5
P2(MPa)
P2' 5 P2 0
0
-5 -2
-1
0
1 F2
-1
0
1 FL(N)
2
液压缸无杆腔的压力变化(m≠n)
3 4 x 10
液压缸有杆腔的压力变化(m≠n)
PS
防气蚀装置原理图
哈工大电液所 IEST Lihr@
9
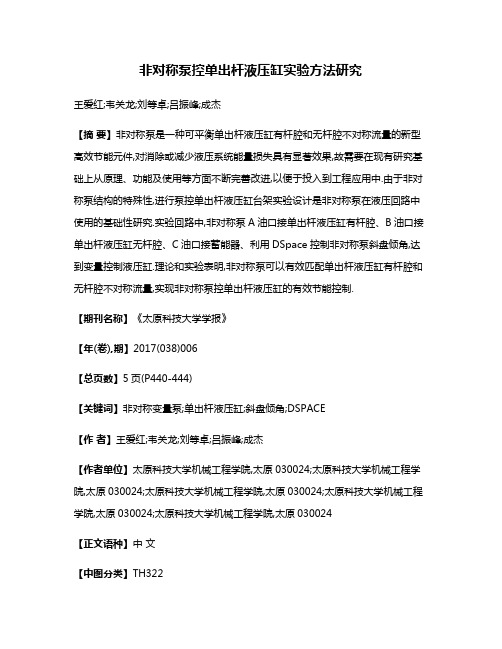
2.4非对称阀控制非对称缸的压力特性 为了从根本上改善液压系统压力特性,建议采用非对称阀控制非对称缸 2.4.1阀与缸完全匹配的情况 阀的节流窗口面积梯度比与缸的面积比相等(m=n),这时两腔压力为
nps FL / A1 p1 p 1 n
p1气蚀条件 p1超压条件
n3 ( p1限制条件) 2 Ps A1 FL Ps A1 m m2 (1 n 2 ) Ps A1 FL Ps A1 (p2限制条件) n p 超压条件 p 气蚀条件
2 2
(活塞杆伸出)时, 当 xv 0 负载 FL 的变化范围限制在
p1' 气蚀条件 p1' 超压条件
C wx Q v 1 d 1 v A1 A1 C wx ( Ps P1 ) d 1 v A1 2 2m 2 ( Ps PL ) 3 2 (n m )
当活塞杆缩回(Xv <0),
Q1 C d w1 x v v A1 A1
C wx P1 d 1 v A1 2
哈工大电液所 IEST Lihr@
16
以对称阀控制非对称缸为例,其压力特性如图所示
非对称伺服阀在阀控缸电液伺服系统中的应用

非对称伺服阀在阀控缸电液伺服系统中的应用摘要:非对称液压缸具有占用空间小、制造简单、成本低等优点,在液压系统中得到广泛应用。
但是,在液压伺服系统中,特别是在零开度伺服阀控制的阀控缸系统中,由于非对称液压缸活塞两侧的承载面积不同,当伺服阀芯在零开度附近摆动时,液压缸的两个腔室交替供油,活塞的运动方向交替变化。
此时液压缸的两个腔室会产生突然的压力跳变,导致系统振荡、爆炸,不仅影响系统的稳定性,还会导致系统无法正常工作,甚至导致液压。
在使用计算机仿真设计液压系统时,这个问题很容易被忽略,导致设计失败。
关键词:伺服阀;不对称液压缸;三通阀;分析一个实际零开口对称伺服阀控不对称液压缸的液压系统设计案例,对对称阀控制不对称液压缸进行了不相容性分析,明确系统产生“爆振”的原因,以及提出该设计失败后的改进方案。
一、对称四通伺服阀控制不对称液压缸可行性1.对称四通伺服阀控制不对称液压缸方程推导。
对称四通伺服阀控制不对称液压缸如图1所示。
图1对称四通伺服阀控制不对称液压缸图1中,L1、A1为液压缸无杆腔行程和有效工作面积;L2、A2为液压缸有杆腔行程和有效工作面积;V1、V2分别为液压缸无杆腔和有杆腔容积;p1、p2分别为液压缸无杆腔和有杆腔压力;vp1、vp2分别为活塞杆伸出与退回速度;∑F1、∑F2分别为活塞杆伸出时负载和退回时负载;q1、q2分别为液压缸无杆腔流量和有杆腔流量;q3为活塞杆外伸时伺服阀的回油流量;q4为活塞杆退回时伺服阀的回油流量;a1、a2、a3、a4为四通伺服阀各节流口的通流截面积;xp为液压缸活塞的位移;mt为活塞及其刚性联接件、油液及负载等效到活塞上的总质量;BP为活塞和负载的黏性阻尼系数;ps为四通伺服阀进油压力;xv为四通伺服阀阀芯位移。
当四通伺服阀为对称零开口阀时,为简化分析,不考虑油液的可压缩性和液压缸的泄漏,假设∑F为液压缸活塞上的总负载,FL为外负载,FC为摩擦力。
2.仿真设计的误区。
泵控非对称液压缸系统能效特性对比研究

泵控非对称液压缸系统能效特性对比研究王波;李运华;赵斌;葛磊;权龙【摘要】以现有对称泵控非对称缸系统和新型三油口泵控非对称缸系统为对象,对四象限工况下两种系统的能效特性进行了对比研究.介绍了两种系统的工作原理,对系统能效进行了理论分析,进一步在Simulation X软件中进行了仿真研究,并讨论了负载力大小对系统能效的影响.仿真结果表明,与对称泵控系统相比,三油口泵控系统第Ⅰ象限内,可提高系统能量效率7.6%,减少系统能量损失66%;第Ⅲ象限内,可提高系统能量效率21.2%,减少能量损失86.4%,因此具有更好的能效特性,节能效果显著.【期刊名称】《液压与气动》【年(卷),期】2018(000)010【总页数】7页(P8-14)【关键词】对称泵;三油口泵;四象限工况;能效特性【作者】王波;李运华;赵斌;葛磊;权龙【作者单位】太原理工大学新型传感器与智能控制教育部与山西省重点实验室,山西太原 030024;北京航空航天大学自动化科学与电气工程学院,北京 100191;太原理工大学新型传感器与智能控制教育部与山西省重点实验室,山西太原 030024;太原理工大学新型传感器与智能控制教育部与山西省重点实验室,山西太原 030024;太原理工大学新型传感器与智能控制教育部与山西省重点实验室,山西太原030024【正文语种】中文【中图分类】TH137引言传统液压阀控系统响应速度快、控制精度高,但存在节流损失大、系统效率低和能量浪费大等问题[1]。
为了提高系统能量效率,最直接的方法是采用泵控系统,通过控制液压泵的排量或转速,直接无节流损失地驱动液压执行器,具有较高的能量效率[2]。
根据执行元件的不同,泵控系统进一步可分为泵控对称缸(马达)和泵控非对称缸两种。
其中,泵控对称缸系统研究起步较早,技术成熟,已广泛应用于飞机舵机等系统。
而泵控非对称缸系统、液压泵流量与液压缸两腔面积不匹配,如何补偿液压缸面积差造成的不对称流量是其需要解决的首要问题[3]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0 引言
非对称液压缸也称单出杆缸,因其具有工作空 间小、结构简单和成本低廉等诸多优点而早已被广 泛采用,在汽轮机调门控制中几乎都采用伺服阀控 非对称缸控制,但相对于阀控对称缸而言,非对称 缸系统在特性上有很大的变化,分析也比较麻烦。 在汽轮机 DEH 控制中,经常会出现由于非对称缸结 构所固有的动态特性非线性,伺服阀换向时,液压 缸两腔压力就会产生压力跃变,影响 DEH 控制系统 的特性,造成调节汽门的波动,以致整个机组的转 速波动,负荷摆动等结果,所以有必要对伺服阀控 非对称缸工作过程中产生的压力跃变现象进行分析 及处理,降低油缸的压力跃变,改善整个 DEH 控制 特性,提高机组运行品质。
B 0
+P (11) PP ,( A→ B ) =(7) +(9) 1.0 0.9 0.8 0.72 0.64
A B 0
+P (11) PP ,( A→ B ) =(7) +(9) 1.0 0.57 0.33 0.21 0.14
A B 0
+P (12) PP ,(B→ A ) =(8) +(10 ) 1.0 1.0 1.2 1.2 1.3
得:
3
,
FB FA = P0 − PB FB
2
FA PB = P0 − PB FB
(5)
F F A A 0 − P B = P B F P F B B
3
3
F 3 F 3 A A P 1+ B 0 F = F P B B
2
3
(6)
(3)
当F
A
= FB
时, P
A
+ PB = P0
汇总:
PB = FA P0 FB FA 1+ F B
3 3
A→B
PA
PA =
P0 FA 1+ F B
2 3
A
流量公式:
QB = 1000 f B P0 − PB
B
BBΒιβλιοθήκη Q A = 1000 f A PA
关于非对称缸液压跃变问题的分析
摘 要: 本文首先根据非对称液压缸在汽轮机调速 DEH 低压透平油控制系统中的广泛应用及非对称液压缸的控制原理,推 导出了非对称缸低压透平油系统液压跃变值的表达式,揭示了液压跃变的实质,分析了液压跃变产生的原因,提出了消除液 压跃变的新途径、新方法,从理论及实际应用中(补偿控制)验证了补偿控制的作用,改善了在汽轮机调速控制中非对称缸 的非线性特性和削减了液压缸在伺服阀换向控制时的液压跃变。 关键词:非对称缸;液压跃变;补偿控制;低压透平油;DEH
1 液压跃变计算
图 1 伺服阀控非对称缸液压系统原理图 油流方向: : A→B 油流方向 F 空载 P F = P F , Q = (1) Q F
A A
A
A
B
B
B
B
假定 f = f 图 1 是 DEH 中伺服阀控非对称缸的液压伺服 控制结构示意图,由于阀为对称阀,液压缸的活塞 Q = 1000 f P − P 两腔的有效面积不等,故流量是不连续的,下面通 过换向阀的换向,油流方向的改变对非对称缸的液 −P Q F = = 压跃变进行计算。 相除得 P P Q F
A B
普通阀控制
QB = 1000 f B PB
P 0 −P A PB FA = F B
2
A
A
0
A
0
A
A
A
B
B
B
(2)
另
PB =
FA PA FB
带入上式:
P 0 −P A FA PA FA FA = F B
2
−P F , PP = F ,
3
当换向为(B → A) → (A → B)时,油压跃升 数值同上,但为负值,即油压跃降。 ∆P ∆P F 1 = , =1 (8) F ∆P ∆P F
A A A B A B B
2 FA FA −1P 0 FB FB ∆P B= 3 FA 1+ F B
B→A
相除得: 由式
PB FA
QA PA F = = A QB P0 − PB FB
2
(4)
FA F P0 B PA = 3 FA 1+ F B
FA F P0 B PB = 3 FA 1+ F B
计算, (本计算结果与机械设计手册第 4 卷 P18-82 所列相同) (1) F 1 1.5 2.0 2.5 3.0 F
A B
(2)
FA F B
2
1 2.25 4.0 6.25 9.0
(3) (4)
FA F B
3
1 3.375 8.0 15.625 27.0
0 A A A
3
B
FA P0 = 1+ F PA B
3
∴P =
A
P 0
3
伺服阀动作: 伺服阀动作: 油流方向: 油流方向:B → A 空载,仍然满足: Q F F P F =P P , = , P = Q F F
A A A A B B B
F A 1+ F B
(2) 0.5 0.5 0.5 0.5 0.5 (8) P , (B → A) = (4) P
A
0
(2) 0.5 0.51 0.44 0.38 0.32 (8) P ,(B →A) = P (4)
A 0
(1) 0.5 0.47 0.43 0.4 0.37 (9) P , ( A → B) = F (4)
3
(4)
FA 1+ F B
A
3
2 2.3 2.7 3.2 3.7 0 0.1 0.16 0.25 0.26 0 0.1 0.2 0.28 0.36
1 (4)
FA 1+ F B
A
2 4.375 9.0 16.625 28.0 0 0.28 0.33 0.31 0.28 0 0.42 0.66 0.78 0.85
B A B
2
P A +P B ,(B→A) =(8) +(10 ) P 0
1.0 1.29 1.3 1.3 1.3
FA
低压透平油系统油动机通常采用不对称缸, 最好限制在 1.3 以内。 F
0
A
FA
B
FB
3
A
B
7)当
FA
FB
=1
时,跃变为零
4 补偿计算
非对称四边控制滑阀对非对称缸的补偿作用。 非对称四边控制滑阀,控制边 A,B 口的密度 不同,以适应非对称缸两边流量的不一样,以补偿 液压跃变。仍按空载计算: F = 设 ff = Q ,P F = P F Q F
P (5) ∆P
0
=
(2) − 1 (4)
P (5) ∆P
0
=
(2) − 1 (4)
P (6) ∆P
0
B
= (1)(5)
P (6) ∆P
0
A 0
B
= (1)(5)
(7) P F
A
0
, (A → B) =
0.5 0.4 0.37 0.3 0.26
1 (7) P 0.5 0.23 0.11 0.06 0.04 ,( A→B) = F (4)
The Analysis of The Asymmetrical Cylinder Hydraulic Climacteric Problem
(杭州和利时自动化有限公司, 浙江杭州 310018)
侯林鹏 刘宓 赵春艳
Abstract
:The paper firstly basic on the extensive use of the asymmetric hydraulic cylinder on the turbine speed regulation DEH low
A B
(12)
由 A→B 换向为 B→A 时,B 腔油压有较大跃升。 3 结果分析 由 B→A 换向为 A→B 时,B 腔油压有较大跃降。总 的来说,在换向时活塞杆侧油压有较大跃变。高压 1)采用四边控制滑阀控制非对称缸时,活塞两边的 压力在换向时必定产生压力跃变。 系统跃变绝对值较大因此要注意控制。 2)本计算是在空载条件下进行的,当考虑负载时, 补充计算: 补充计算: 跃变会更大。 F 3)由于压力跃变,在活塞腔内的油液会产生内爆或 (1) F 1 1.1 1.2 1.3 1.4 外爆,使液压缸不能平稳地工作,即使在滑阀中 位时也不稳定。 F (2) 1 1.21 1.44 1.69 1.96 4)根据机械设计手册规定, 应控制在小于 1.21 F 以内。 F (3) 1 1.3 1.7 2.2 2.7 5)虽然油压跃变值在活塞两端形成的力是平衡的, F 但是,油液内爆或外爆所产生的油压不稳仍可导 致油缸动作不稳。 6)采用不对称四边控制滑阀,可以消除油压跃变。
P B=
F A P 0 F B
3
F A 1+ F B
FA 0 1+ F P B P A +P B= 3 FA 1+ F B
FA FA F + F B B P PA + PB = 0 3 FA 1+ F B
B 0
(1) 0.5 0.34 0.22 0.15 0.11 (9) P ,( A→B) = F (4)