第3章-交通流模型讲解
道路工程第三章 道路交通流特性及通行能力
N /T Q K L /T V
Q KV
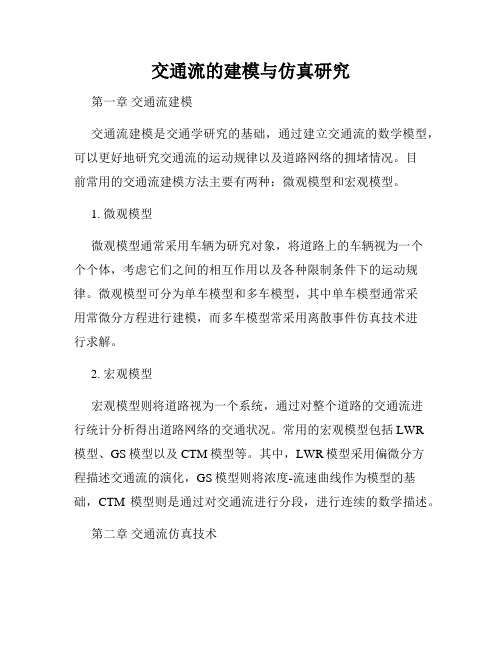
• 关系式(4—25)可用三维坐标系中的空间曲线来表示,
如图:
Qm
Q
0
Vm V Vf 图4—7 Q=VK曲线图
Kj
K
可以确定反映交通流特性的一些特征变量:
1.最大流量Qm, 是Q—V图上的顶点,是交通量的峰 值; 2.临界速度Vm 与Qm相对应的值,是流量达到最大值 时的速度; 3.畅行速度Vf,当密度趋于零时,车辆可畅行行驶, 此时的速度为畅行速度; 4.最佳密度Km,流量达到最大值时的密度,又称临界 密度;
1 Vt Vt n i 1
(二) 区间平均车速 在某一瞬间,行驶于某一区段的全部 Ln 车辆的车速分布的平均值 (详见例4-5)
Vs
t
i 1
n
i
第四节
交通密度特性
道路交通有这样常见的现象: 1、当道路上车辆很少时,流量近似于零, 交通流呈自由状态; 2、当道路上挤满了车辆时,流量也趋近 于零,而此时交通流却呈现阻塞状态
1 n 3600 ht hti n i 1 Q
__
车头时距是交通流的重要变量之一,车头时距大小影响车 辆运行安全、道路服务水平、驾驶行为和道路的通行能力。
车头时距的分布分类: 随机状态、常态分布、中间状态
车头时距的应用 1.路段通行能力的研究 2.交叉口通行能力的研究 3.其他
(二)车头间距(space headway )
(二) 行车速度统计分布的特征值
从速度累计频率分布曲线图就可以分析行车 速度统计分布的特征值 1. 中位车速。也称50%车速,表示在该速 度以下行驶的车辆与该速度以上行驶的车辆数相 等。在正态分布的情况下,中位车速等于平均车 速 2. 85%位车速。表示所观测的车辆中,有 85%的车辆行驶在此速度以下,只有15%的车辆 行使速度高于此值。因此,为了确定绝大多数车 辆都能遵守的速度,同时又能最大限度地保证行
现代交通流理论课件

• 交通流基本概念 • 交通流理论模型 • 交通流特性分析 • 交通流波动理论 • 交通流控制策略 • 现代交通流理论应用
目录
01
交通流基本概念
交通流定义
交通流
在某一路段上,一段时间内,车辆、 行人等交通实体在路上的流动过程。
交通流模型
通过数学建模描述交通流特性的理论 模型。
交通流稳定性的判定
要点一
交通流稳定性的定义
根据交通流的波动性质,定义交通流稳定性,并说明稳定 性的物理意义。
要点二
交通流稳定性判别的数值方法
通过数值方法求解交通流波动方程,根据解的性质判断交 通流的稳定性。
05
交通流控制策略
交通信号控制
实时感应控制
通过安装传感器和检测器,实时监测交通流 量和拥堵情况,调整信号灯的灯光时序和时 间,提高交通效率。
多模式交通规划
考虑多种交通方式的需求和特点,规划公共交通、步行、自行车等 交通方式的优先级和衔接,提高综合交通效率。
交通法规与安全教育
法规制定与宣传
01
根据交通流理论和实际情况,制定合理的交通法规和安全规定
,并通过媒体、宣传栏等方式进行广泛和培训,提高公众的交通安全意识和技能水
交通流参数
流量
单位时间内通过某一路段的车辆数量 。
速度
车辆在行驶过程中的平均速度。
密度
单位长度内车辆的数量。
交通流密度-速度曲线
描述交通密度与速度之间关系的曲线 。
交通流分类
连续流
车辆连续行驶,无间隔,如高速公路。
稳定流
交通状态稳定,无突变,如常规交通路线。
间断流
车辆行驶过程中有间隔,如城市道路。
元胞自动机交通流模型.课件

模拟结果中流量与密度关系的曲线可以用来指导城市交通规划。在规划道路时,应考虑车辆密度对交通 流量的影响,合理设置道路宽度和车道数量。
模拟结果的比较与评价
不同模型之间的比较
我们将元胞自动机交通流模型的结果与其他经典交通流模型进行了比较。通过比较发现 ,元胞自动机模型能够更好地模拟实际交通情况,特别是在复杂路况和多车道情况下的
物流配送
利用元胞自动机模型模拟物流配 送过程中的车辆行驶和货物运输 ,优化配送路线和策略。
公共安全
元胞自动机模型可用于模拟人群 流动和应急疏散,为公共安全事 件提供决策支持。
环境影响评估
通过模拟污染物在环境中的扩散 和迁移,元胞自动机模型有助于 评估环境影响和制定环境保护措 施。
元胞自动机交通流模型的未来研究方向
元胞自动机的应用领域
交通流模拟
元胞自动机可以模拟和分析交通流的 行为和特性,如拥堵现象、车速分布 等。
城市规划
元胞自动机可以用于模拟城市的发展 和演化,预测城市扩张和人口分布等 。
生态学
元胞自动机可以用于模拟生态系统的 行为和演化,如物种竞争、群落演替 等。
社会学
元胞自动机可以用于模拟和分析社会 现象,如人口迁移、群体行为等。
表现更优。
模型的优缺点分析
元胞自动机交通流模型具有简单、易实现和可扩展性强的优点,但也存在计算量大、模 拟结果受参数设置影响较大的缺点。在实际应用中,需要根据具体需求和条件选择合适
的模型。
05
CHAPTER
元胞自动机交通流模型的应 用前景与展望
元胞自动机交通流模型在交通规划与管理中的应用前景
交通流模拟
阻塞波传播
在模拟中,我们观察到了阻塞波 在道路上的传播现象。当一辆慢 车出现时,后面的车辆会逐渐减 速并形成阻塞波,导致交通拥堵
《交通流理论 》课件
研究车辆在行驶过程中的群体行为和相互作用,揭示交通流 的内在机制。
交通流模型的比较与选择
适用范围
根据研究目的和场景选择合适的交通流模型,宏观模型适用于整体交通状况分析和预测,微观模型适用于个体车辆行 为研究和模拟,介观模型适用于揭示交通流内在机制和规律。
精度与计算成本
不同模型的精度和计算成本各不相同,需根据研究需求进行权衡和选择。
交通安预防提供理论支持。
02
交通流模型
宏观交通流模型
80%
平均速度-流量模型
描述交通流中车辆的平均速度与 流量之间的关系。
100%
交通流密度-流量模型
研究交通流密度与流量之间的关 系,用于描述交通流的拥堵状况 。
80%
宏观交通流模拟模型
通过模拟整个交通网络的运行情 况,预测交通流的变化趋势。
数据需求
不同模型所需的数据类型和数据量也不同,需根据可获取的数据情况进行选择。
03
交通流特性分析
交通流的流量特性
流量定义
交通流量是指在单位时间内通过道路某一断面的 车辆数。
流量变化
交通流量在不同时间段和不同道路条件下会有所 变化,通常呈现早晚高峰现象。
流量影响因素
交通流量受到多种因素的影响,如道路状况、交 通规则、车辆类型、驾驶员行为等。
微观交通流模型
车辆跟驰模型
描述单个车辆在行驶过程中与 前车的跟随行为。
车辆换道模型
研究车辆在行驶过程中换道的 决策过程和换道行为对交通流 的影响。
微观交通流模拟模型
模拟单个车辆在道路上的行驶 行为,用于评估交通设施和交 通管理措施的效果。
介观交通流模型
流体动力学模型
将交通流视为流体,通过流体动力学理论描述交通流的运动 特性。
宏观交通流模型课件

THANKS
特点
宏观交通流模型具有描述交通流 的整体特性、考虑交通网络上不 同区域的差异、基于实际数据建 立模型等优点。
模型发展历程
01
02
03
奠基阶段
20世纪50年代, Wardrop提出了第一代宏 观交通流模型,奠定了宏 观交通流模型的基础。
发展阶段
20世纪70年代,第二代宏 观交通流模型出现,引入 了交通流的基本特性,如 流量、速度、占有率等。
交通流模型建立方法
理论建模
基于交通流的基本原理和数学理论,建立交通流 模型。
实证建模
通过对实际交通数据进行采集和分析,建立反映 实际交通状况的模型。
混合建模
将理论建模和实证建模相结合,建立更加精确和 实用的交通流模型。
03 常见宏观交通流模型介绍
基于流量守恒的模型
连续流模型
该模型假设交通流是连续的,并且每个车辆的速度和加速度 都可以连续变化。它通常用于描述高速公路上的交通流。
交通流分类
根据交通工具的不同,交通流可分为 汽车流、行人流、自行车流等。
交通流参数与特性
01
02
03
04
交通流量
指单位时间内通过道路某一断Байду номын сангаас面的交通量,单位为辆/小时
。
交通流速度
指交通流中车辆的平均速度, 单位为米/秒。
交通流密度
指单位长度内道路上的车辆数 ,单位为辆/公里。
交通流特性
包括交通流的稳定性、波动性 、随机性等。
基于流量分布的模型
概率密度函数模型
该模型假设每个车辆的速度和加速度 都符合一定的概率密度函数,并且车 辆之间的相互作用是随机的。它通常 用于描述高速公路上的交通流。
交通流理论第三章驾驶员的交通特性
1、概念:
停车视距是指在汽车行驶时,驾驶员发现前方障碍物,经判断决定采取制
动措施到汽车在障碍物前安全停住所需的最短距离。
2、停车视觉至少应该满足“平均水平一下”的驾驶员或车辆在该距离内能够
停车。
3、停车视距的计算公式
S=S1+S2
其中:S1为感觉反应距离;S2为制动距离
第四节 驾驶员交通特性的应用
2、离散驾驶行为
3、连续驾驶模型
4、驾驶员交通特性的应用 5、小结
第一节 驾驶任务
1、驾驶员的三个层次
控制(control)
引导(guidance)
导驶(navigation)
(1)控制 驾驶员和车辆之间的信息交换和控制,是驾驶任务层次中的基本层次,主
要是指驾驶员对车辆的操作,比如:启动、加速、减速、转向、制动等。
4.91弧分; ●同样对比度下晚上的视觉角度是白天的约2.5倍。 (2)障碍和危险的识别与确认 对道路上的物体进行觉察后,接着就是识别和确认。 15cm高、60cm高
第二节 离散驾驶行为6、驾驶行为的个体差异 (1)性 Nhomakorabea (2)年龄
●视觉变化:视觉敏锐度、光损失和散光、炫目等 ●认知行为变化:信息过滤、公路上的被迫跟随、时代的变化 (3)驾驶员的伤害
第三节 连续驾驶模型
驾驶过程是一个连续过程 一、驾驶行为
驾驶员可以看作是一个线性的闭环控制系统。 1、驾驶传递函数
驾驶活动中的两个输入: ●驾驶员期望的路线 ●车辆当前行驶的方向和路线
第三节 连续驾驶模型
图中的模型可以用公式来表示:
其中:K为增益,exp(-ts)是反应时间,T由特定的控制状态下由实验得到 该模型为建立驾驶员驾驶模型的基本方法。 驾驶行为分类:修正的跟踪模式驾驶;跟踪驾驶;有预见性的驾驶 这可从表3-8得出。
交通工程学第三章 交通流的基本特性
图3-3 交通流量、车流密度、 行车速度关系二维图
第五节 交通流的基本特性及其相互关系
(1)极大流量Qm,就是Q -v曲线上的峰值。 (2)临界速度vm,即流量达到极大时的速度。 (3)最佳密度km,即流量达到极大时的密度。
(4)阻塞密度kj,车流密集到所有车辆无法移动(v=0)时的密度。 (5)畅行速度vf,车流密度趋于零,车辆可以畅行无阻时的平均速 度。 二、速度与密度的关系 1933年,格林希尔茨提出了速度—密度线性关系模型
(二)车辆的影响 (三)道路的影响 1.道路类型 2.平面线形 3.纵断面线形 4.车道数及车道位置 5.视距 6.侧向净空 7.路面条件
第三节 行车速度特性
(四)交通条件的影响 1.交通量 2.交通组成
3.交通管理 (五)环境的影响
第四节 交 通 密 度
一、交通密度的含义及表示方法 当交通量为零时,不能说明这时没有车辆,而是有两种情况,一 是道路上没有车辆行驶;二是车速为零,有车而不流,这时是阻
3.15%位车速与速率波动幅度
S≈
三、时间平均车速与区间平均车速 1.时间平均车速
2.区间平均车速
第三节 行车速度特性
3.时间平均车速与区间平均车速之间的互换关系
四、影响车速变化的因素
第三节 行车速度特性
影响车速的因素很多,主要随驾驶员、车辆、道路、交通及环境 等因素的变化而变化,其规律简述如下。 (一)驾驶员的影响
塞。
(一)车头间距
第四节 交 通 密 度
(二)车头时距
第四节 交 通 密 度
(三)临界密度和阻塞密度 二、交通密度的分布特性 交通密度的分布特性是用空间占有率和时间占有率来描述的,统 称车道占有率。 (一)空间占有率
交通流的建模与仿真研究
交通流的建模与仿真研究第一章交通流建模交通流建模是交通学研究的基础,通过建立交通流的数学模型,可以更好地研究交通流的运动规律以及道路网络的拥堵情况。
目前常用的交通流建模方法主要有两种:微观模型和宏观模型。
1. 微观模型微观模型通常采用车辆为研究对象,将道路上的车辆视为一个个个体,考虑它们之间的相互作用以及各种限制条件下的运动规律。
微观模型可分为单车模型和多车模型,其中单车模型通常采用常微分方程进行建模,而多车模型常采用离散事件仿真技术进行求解。
2. 宏观模型宏观模型则将道路视为一个系统,通过对整个道路的交通流进行统计分析得出道路网络的交通状况。
常用的宏观模型包括LWR模型、GS模型以及CTM模型等。
其中,LWR模型采用偏微分方程描述交通流的演化,GS模型则将浓度-流速曲线作为模型的基础,CTM模型则是通过对交通流进行分段,进行连续的数学描述。
第二章交通流仿真技术交通流仿真技术是研究交通流行为和路网拥堵情况的重要手段,是对交通流建模的一种实践应用。
现有的交通流仿真技术包括离散事件仿真技术、连续仿真技术以及混合仿真技术。
1. 离散事件仿真技术离散事件仿真技术是一种基于事件的仿真技术,仿真过程中不断触发事件,通过实时修改模型的状态进行仿真。
离散事件仿真技术具有高精度的特点,能够准确模拟各种交通流场景,是现在广泛使用的仿真技术之一。
2. 连续仿真技术连续仿真技术将道路分段,建立数学模型来描述每一段道路上的交通流行为。
这种仿真技术通常使用微分方程或代数方程作为基础,仿真速度较快,但是相对于离散事件仿真技术,其仿真精度略低。
3. 混合仿真技术混合仿真技术结合离散事件和连续仿真技术的优点,通过将道路段和拓扑结构等进行细致的划分,在仿真过程中采用不同的仿真技术进行仿真模拟,从而提高仿真结果的准确性和仿真速度。
第三章交通流仿真软件目前的交通流仿真软件主要分为两类:商业软件和开源软件。
不同的交通仿真软件注重的问题和功能不同,通常被广泛应用于城市规划、交通管理以及交通流行为研究等领域。