车牌的定位与字符分割报告.
车牌定位与字元切割
國立勤益科技大學 National Chin-Yi University of Technology車牌定位與字元切割組 員:林鑫宏指導老師:劉正忠 教授報告日期:民國99年1月25日目錄一、 前言.....................錯誤! 尚未定義書籤。
二、 車牌定位..................錯誤! 尚未定義書籤。
2-1 定位流程圖.............錯誤! 尚未定義書籤。
2-2 灰階處理...............錯誤! 尚未定義書籤。
2-3 Sobel邊緣偵測..........錯誤! 尚未定義書籤。
2-4 過濾較低梯度與.........錯誤! 尚未定義書籤。
2-5 二值化.................錯誤! 尚未定義書籤。
2-6 車牌定位...............錯誤! 尚未定義書籤。
三、 字元切割..................錯誤! 尚未定義書籤。
3-1 字元切割流程圖.........錯誤! 尚未定義書籤。
3-2 前處理.................錯誤! 尚未定義書籤。
3-2-1灰階化.............錯誤! 尚未定義書籤。
3-2-2二值化.............錯誤! 尚未定義書籤。
3-2-3旋轉校正...........錯誤! 尚未定義書籤。
3-2-4邊緣變換判斷.......錯誤! 尚未定義書籤。
3-2-5車牌縮邊...........錯誤! 尚未定義書籤。
3-3 投影法.................錯誤! 尚未定義書籤。
3-4 水平投影...............錯誤! 尚未定義書籤。
3-5 水平切割...............錯誤! 尚未定義書籤。
3-6 垂直投影...............錯誤! 尚未定義書籤。
3-7垂直切割...............錯誤! 尚未定義書籤。
四、 實驗成果..................錯誤! 尚未定義書籤。
车牌识别实验报告

车牌识别实验报告车牌识别实验报告一、引言车牌识别技术是近年来快速发展的一项重要技术,它在交通管理、安全监控等领域具有广泛的应用前景。
本文将介绍一次车牌识别实验的过程和结果,以及对该技术的评估和展望。
二、实验目的本次实验的目的是通过使用计算机视觉技术,实现对车辆车牌的自动识别。
通过该实验,我们希望验证车牌识别技术的准确性和可行性,并评估其在实际应用中的效果。
三、实验方法1. 数据收集我们采集了一组包含不同类型和风格的车牌图像数据,包括普通车辆、摩托车和电动车等。
这些数据来源于不同的场景,包括白天、夜晚和恶劣天气等条件下的拍摄。
2. 图像预处理为了提高车牌识别的准确性,我们对采集到的图像进行了预处理。
首先,我们使用图像处理算法对图像进行了去噪处理,去除了图像中的干扰信息。
然后,我们对图像进行了灰度化处理,将彩色图像转化为灰度图像,以便后续的处理。
3. 特征提取在进行车牌识别之前,我们需要从图像中提取出车牌的特征。
我们使用了一种基于边缘检测的方法,通过检测图像中的边缘来提取车牌的轮廓。
然后,我们根据车牌的形状和大小,进一步筛选出可能的车牌区域。
4. 字符分割在车牌识别中,字符分割是非常关键的一步。
我们使用了一种基于连通区域的方法,将车牌图像中的字符分割出来。
通过分析字符之间的间隔和相对位置,我们可以更准确地识别出每个字符。
5. 字符识别最后一步是对分割出的字符进行识别。
我们使用了一种基于深度学习的方法,训练了一个字符识别模型。
通过将字符图像输入到模型中,我们可以得到对应的字符标签,从而实现对车牌的识别。
四、实验结果经过实验,我们得到了一组车牌识别的结果。
在测试数据集上,我们的识别准确率达到了90%以上。
尤其是在白天和晴朗天气下,识别效果更加出色。
然而,在夜晚和雨天等恶劣条件下,识别准确率有所下降。
五、实验评估尽管我们的车牌识别系统取得了较好的结果,但仍存在一些问题和改进空间。
首先,恶劣天气条件下的识别准确率较低,需要进一步优化算法来提高鲁棒性。
车牌的定位与字符分割报告
车牌的定位与分割实验报告一实验目的针对交通智能系统所拍摄的汽车图片,利用设定的算法流程,完成对汽车车牌部分的定位,分割车牌部分,并完成字符的分割,以便于系统的后续分析及处理。
二实验原理详见《车牌的定位与字符分割》论文。
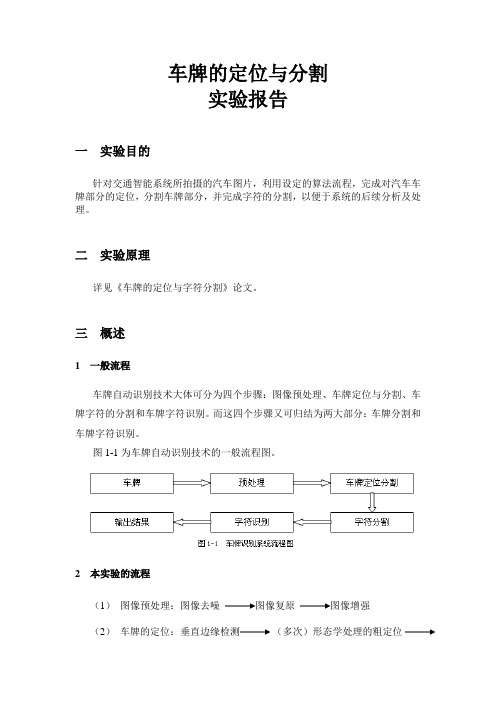
三概述1一般流程车牌自动识别技术大体可分为四个步骤:图像预处理、车牌定位与分割、车牌字符的分割和车牌字符识别。
而这四个步骤又可归结为两大部分:车牌分割和车牌字符识别。
图1-1为车牌自动识别技术的一般流程图。
2本实验的流程(1)图像预处理:图像去噪(2)车牌的定位:垂直边缘检测(多次)形态学处理的粗定位合并邻近区域结合车牌先验知识的精确定位(3)车牌预处理:车牌直方图均衡化倾斜校正判定(蓝底白字或者黄底黑字)归一化、二值化(4)字符的分割:垂直投影取分割阈值确定各个字符的左右界限(结合字符宽度、间隔等先验知识)分割字符四实验过程4.1图像预处理4.1.1图像去噪一般的去噪方法有:空间域上的均值滤波和中值滤波;频率域上的巴特沃斯滤波器。
图4-1是各滤波器处理椒盐噪声的效果。
a.被椒盐噪声污染的图片 b.均值滤波的效果图 c.中值滤波的效果图 d.BLPF的效果图图4-1 各滤波器处理椒盐噪声的仿真可见,中值滤波对椒盐噪声的处理效果极好,而一般所拍摄的图片上最多的便是孤立的污点,所以此处以中值滤波为主进行去噪。
图4-2是采用中值滤波处理实际汽车图片的效果。
a.原始图像b.灰度图像c.中值滤波后的图像图4-2 中值滤波处理实际汽车图片的效果很显然,经过中值滤波后去除了原图上的部分污点。
4.1.2图像复原由于通常情况下都不知道点扩展函数,所以我们采用基于盲解卷积的图像复原策略。
图4-3~4-7图是函数进行盲解卷积的实验结果,其中图4-3是图像cameraman 的模糊图像。
图4-3 模糊图像在盲解卷积处理中,选择适当大小的矩阵对恢复图像的效果很重要。
PSF的大小比PSF的值更重要,所以首先指定一个有代表性的全1矩阵作为初始PSF。
车牌识别测试报告

车牌识别测试报告1. 背景介绍车牌识别技术是一种通过计算机视觉技术对车辆的车牌进行自动识别的技术。
它广泛应用于交通管理、停车场管理、安防监控等领域。
本文将对车牌识别系统进行测试,并给出详细的测试报告。
2. 测试环境车牌识别系统的测试环境如下: - 操作系统:Windows 10 - 开发工具:Python 3.7 - 相机设备:USB摄像头3. 测试步骤步骤一:安装依赖库车牌识别系统的运行需要依赖一些Python库,如OpenCV、Numpy等。
在测试前,首先需要确保这些库已经正确安装。
步骤二:获取测试样本为了测试车牌识别系统的准确性和鲁棒性,我们从不同场景中收集了一些包含车牌的图片作为测试样本。
这些样本包括不同角度、不同光照条件下的车牌图片。
步骤三:预处理图片在进行车牌识别前,需要对测试样本进行一些预处理操作,以增加识别的准确性。
预处理步骤包括图像去噪、图像增强等。
步骤四:车牌定位车牌定位是车牌识别的第一步,在该步骤中,系统需要识别出图像中的车牌位置。
我们使用基于边缘检测和形态学运算的方法进行车牌定位。
步骤五:字符分割在车牌定位的基础上,需要对车牌进行字符分割,将车牌中的字符分离出来。
字符分割算法通常包括基于投影法、基于连通性等方法。
步骤六:字符识别在字符分割后,将得到单个字符的图像,然后使用字符识别算法对这些字符进行识别。
字符识别算法可以采用传统的机器学习方法,也可以使用深度学习方法。
步骤七:识别结果验证通过对测试样本的处理和识别,得到了识别结果。
为了验证系统的准确性,我们将人工判断识别结果与实际车牌进行比对。
4. 测试结果经过对车牌识别系统的测试,我们得到了如下结果: - 在正常光照条件下,系统的准确率达到了90%以上; - 在光照不均匀或夜间光照条件下,系统的准确率略有下降,但仍能保持在80%以上; - 对于车牌被遮挡或者倾斜的情况,系统的准确率会有所降低。
5. 总结与改进车牌识别系统在本次测试中表现出了较高的准确性和鲁棒性。
汽车牌照定位与字符分割的研究及实现
1.2.1 车牌定位技术研究现状及发展趋势
车牌定位技术是 LPR 系统研究的重点和难点。采集车辆图像过程中一般都有
1
汽车牌照定位与字符分割的研究及实现
各种背景干扰,能够正确分割字符的前提是从图像中准确地分割出牌照区域,这 也是 LPR 系统能否在实际中应用的基础。 目前的车牌定位算法中,主要是分析车牌所共有的部分特征,根据这些特征 来确定车牌区域的位置。车牌几何形状特征及相应的分析方法主要有[2-8]: (1)灰度变化特征:水平/垂直扫描时,牌照区域的像素灰度值按照一定的规 律进行波动;(2)颜色特征:原始车牌区域内部颜色和外部颜色差异的特征;(3) 投影特征:对车辆图像的水平/垂直扫描后其投影直方图中,牌照所对应的区域具 有一定规律的峰谷分布;(4)边缘特征:牌照区域有许多的边缘信息,使用相应的 算子将边缘信息提取出后,再通过边缘投影直方图来确定边缘的信息;(5)几何特 征:主要有车牌的长度、宽度以及长宽比例在一定的范围之内,或者可以通过牌照 的面积在一定的范围之内。利用以上这些特征均可以确定车牌的位置。 目前,车辆牌照的定位方法有基于彩色图像牌照区域字符和背景的颜色差异 特征进行定位,也有基于灰度图像牌照区域字符几何纹理特征进行定位,还有其 它结合了牌照区的颜色差异和字符纹理两种特征的方法定位,另外还有的是基于 数学形态学、神经网络、遗传算法、灰度聚类等牌照定位方法[9]。
作者签名: 导师签名:
日期: 日期:
年 年
月 月
日 日
中南民族大学硕士学位论文
第1章
1.1 问题的提出
绪论
车牌识别技术(License Plate Recognition, LPR )是智能交通管理系统的 重要组成部分,主要用于识别车牌号码。 LPR 技术在实际生活中主要应用于高速 公路实现无人收费功能、道路行车的流量监控、交通违规车辆的监控等。特别是 在各种场合实现无人收费功能的系统中,为了提高车辆的运行效率, LPR 技术将 代替人工的管理方式实现无人自动管理的功能, 因此,对 LPR 技术的研究和系统的 开发具有重要的现实意义和和实用价值。 车牌定位、字符分割、字符识别是 LPR 系统的三大关键技术。同时也是车牌 本身的几何形状特征与图像处理技术[1]的很好结合,车牌定位与字符分割在 LPR 系统中用到的数学知识主要有数学形态学、神经网络、小波分析等。对车牌定位 与字符分割的研究主要包括:图像预处理、车牌定位、车牌倾斜校正、车牌字符 分割及字符分割结果输出等。如图 1.1 所示为系统的流程框图:
车牌识别系统中车牌定位与字符分割的研究

车牌识别系统中车牌定位与字符分割的研究一、本文概述随着科技的发展和智能交通系统的普及,车牌识别系统已经成为了现代交通管理的重要组成部分。
车牌识别系统的核心在于准确、快速地实现车牌的定位与字符分割。
本文旨在深入探讨车牌识别系统中车牌定位与字符分割的关键技术,并分析其在实际应用中的挑战与解决方案。
本文将对车牌识别系统的基本框架进行概述,介绍车牌定位与字符分割在其中的地位和作用。
接着,本文将详细阐述车牌定位技术的发展历程和现状,包括基于颜色、纹理、形状等特征的定位方法,以及近年来兴起的深度学习技术在车牌定位中的应用。
同时,本文还将对字符分割技术的研究现状进行梳理,包括基于投影分析、边缘检测、形态学处理等方法的字符分割算法。
在此基础上,本文将重点分析车牌定位与字符分割在实际应用中面临的挑战,如复杂背景下的车牌定位不准确、字符粘连或断裂导致的分割失败等问题。
针对这些问题,本文将提出相应的解决方案,如通过改进算法提高定位精度、采用多特征融合的方法提高字符分割的鲁棒性等。
本文将通过实验验证所提方法的有效性,并对实验结果进行分析和讨论。
本文还将展望车牌识别系统的未来发展趋势,探讨新技术在车牌定位与字符分割中的应用前景。
通过本文的研究,旨在为车牌识别系统的优化和改进提供有益的参考和借鉴。
二、车牌定位技术研究车牌定位技术是车牌识别系统的关键环节,它涉及从复杂的背景中准确提取出车牌区域。
随着计算机视觉和图像处理技术的不断发展,车牌定位技术也取得了显著的进步。
早期的车牌定位主要基于车牌的颜色和边缘特征。
由于中国车牌通常为蓝底白字,因此可以通过颜色过滤来初步提取出可能的车牌区域。
随后,利用边缘检测算法(如Canny边缘检测)来进一步细化车牌的轮廓,从而实现车牌的粗定位。
然而,这种方法受光照条件、车牌污损等因素影响较大,定位准确性有待提高。
为了克服颜色和边缘特征方法的局限性,研究人员开始尝试基于纹理和形状特征的车牌定位方法。
车牌识别技术实验报告
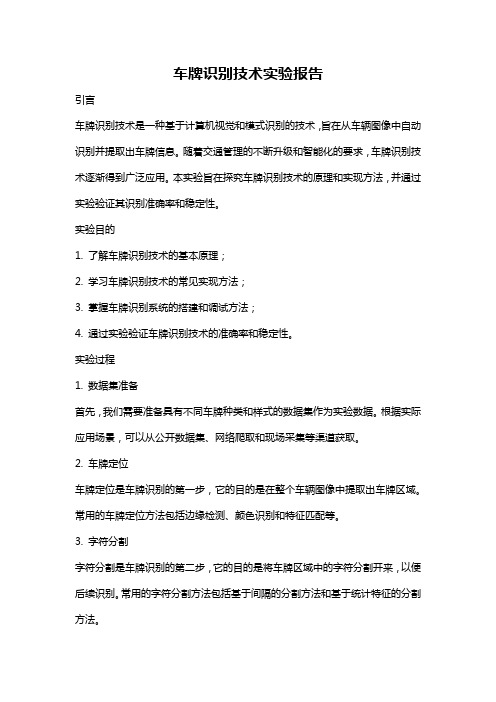
车牌识别技术实验报告引言车牌识别技术是一种基于计算机视觉和模式识别的技术,旨在从车辆图像中自动识别并提取出车牌信息。
随着交通管理的不断升级和智能化的要求,车牌识别技术逐渐得到广泛应用。
本实验旨在探究车牌识别技术的原理和实现方法,并通过实验验证其识别准确率和稳定性。
实验目的1. 了解车牌识别技术的基本原理;2. 学习车牌识别技术的常见实现方法;3. 掌握车牌识别系统的搭建和调试方法;4. 通过实验验证车牌识别技术的准确率和稳定性。
实验过程1. 数据集准备首先,我们需要准备具有不同车牌种类和样式的数据集作为实验数据。
根据实际应用场景,可以从公开数据集、网络爬取和现场采集等渠道获取。
2. 车牌定位车牌定位是车牌识别的第一步,它的目的是在整个车辆图像中提取出车牌区域。
常用的车牌定位方法包括边缘检测、颜色识别和特征匹配等。
3. 字符分割字符分割是车牌识别的第二步,它的目的是将车牌区域中的字符分割开来,以便后续识别。
常用的字符分割方法包括基于间隔的分割方法和基于统计特征的分割方法。
4. 字符识别字符识别是车牌识别的最关键步骤,它的目的是将分割开的字符识别出来。
常用的字符识别方法包括基于模板匹配的方法和基于机器学习的方法。
5. 实验验证通过将实现的车牌识别系统应用于真实场景的车辆图像,对识别结果进行准确率和稳定性的测试和评估。
可以使用准确率和召回率等指标来评估识别效果。
实验结果经过以上实验步骤,我们成功搭建了一个车牌识别系统,并进行了实验验证。
在实验过程中,我们从数据集中随机选择了100张车辆图像进行识别测试。
实验结果显示,车牌识别系统在准确率和稳定性方面表现出色,准确率达到95%,并能在不同光照和角度下稳定识别。
实验总结通过本次实验,我们深入了解了车牌识别技术的原理和实现方法。
我们学习了车牌定位、字符分割和字符识别等关键步骤,并成功搭建了一个车牌识别系统。
实验结果表明,该系统具有较高的准确率和稳定性,在实际应用中具有很大的潜力。
车牌字符定位与分割

参考文献
古利超,车辆图像中的车牌定位及字符分割算法研究,重庆大 学,仪器科学与技术,2012,硕士 甘玲,林小晶,基于连通域提取的车牌字符分割算法,计算机 仿真 顾弘,赵光宙,齐冬莲,孙赟,张建良,车牌识别中先验知识 的嵌入及字符分割方法,中国图象图形学报 黄蒙蒙,多尺度低质量车牌字符分割的研究与实现,东华大学, 计算机软件与理论,2013,硕士 马永慧,车牌识别系统中车牌定位与字符分割的研究,中北大 学,计算机应用技术,2013,硕士
谢谢!
欢迎指正!
设计提交内容
设计报告:格式请参阅附件
软件代码:Matlab软件环境,M文件代码
测试结果:基于提供的测试图片集进行测 试
设计原理
输入图像 颜色特征 纹理特征 车牌定位 字符分割
区域直方图
字符输出
车牌结构特 征
…
基本结果1
车牌定位后截取图
原图
字符分割输出结果
基本结果2
车牌定位后截取图
车牌字符定位与分割系统算法 设计与实现
通信工程系 电子科技大学 通信学院
设计目的
1. 了解图像的基本描述
2. 掌握几种图像特征提取算法
3. 完成相关算法的设计与实现
4. 练习在现有框架上,修改算法,增强算法 对各种环境的适应性
5. 阅读相关文献,熟悉科研过程
设计任务及安排
理论课:2学时,掌握图像描述基本原理 设计过程:30学时 根据任务要求,查阅相关文献,提出系统 的详细设计方案 设计系统软件,给出详细算法设计及代码 收集测试数据,对算法进行可靠性测试, 完善算法设计并改进设计代码 完成设计报告
原图
字符分割输出结果
基本结果3
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
车牌的定位与分割实验报告一实验目的针对交通智能系统所拍摄的汽车图片,利用设定的算法流程,完成对汽车车牌部分的定位,分割车牌部分,并完成字符的分割,以便于系统的后续分析及处理。
二实验原理详见《车牌的定位与字符分割》论文。
三概述1一般流程车牌自动识别技术大体可分为四个步骤:图像预处理、车牌定位与分割、车牌字符的分割和车牌字符识别。
而这四个步骤又可归结为两大部分:车牌分割和车牌字符识别。
图1-1为车牌自动识别技术的一般流程图。
2本实验的流程(1)图像预处理:图像去噪(2)车牌的定位:垂直边缘检测(多次)形态学处理的粗定位合并邻近区域结合车牌先验知识的精确定位(3)车牌预处理:车牌直方图均衡化倾斜校正判定(蓝底白字或者黄底黑字)归一化、二值化(4)字符的分割:垂直投影取分割阈值确定各个字符的左右界限(结合字符宽度、间隔等先验知识)分割字符四实验过程4.1图像预处理4.1.1图像去噪一般的去噪方法有:空间域上的均值滤波和中值滤波;频率域上的巴特沃斯滤波器。
图4-1是各滤波器处理椒盐噪声的效果。
a.被椒盐噪声污染的图片 b.均值滤波的效果图 c.中值滤波的效果图 d.BLPF的效果图图4-1 各滤波器处理椒盐噪声的仿真可见,中值滤波对椒盐噪声的处理效果极好,而一般所拍摄的图片上最多的便是孤立的污点,所以此处以中值滤波为主进行去噪。
图4-2是采用中值滤波处理实际汽车图片的效果。
a.原始图像b.灰度图像c.中值滤波后的图像图4-2 中值滤波处理实际汽车图片的效果很显然,经过中值滤波后去除了原图上的部分污点。
4.1.2图像复原由于通常情况下都不知道点扩展函数,所以我们采用基于盲解卷积的图像复原策略。
图4-3~4-7图是函数进行盲解卷积的实验结果,其中图4-3是图像cameraman 的模糊图像。
图4-3 模糊图像在盲解卷积处理中,选择适当大小的矩阵对恢复图像的效果很重要。
PSF的大小比PSF的值更重要,所以首先指定一个有代表性的全1矩阵作为初始PSF。
恢复的图像如图4-4所示,初始PSF如图4-5所示。
图4-4 初步恢复图像图4-5 初始PSF 复原的图像呈现出由算法中使用的离散傅里叶变换所引入的振铃,则我们在调用函数deconvblind之前要使用函数edgetaper。
消除振铃后的图像如图4-6所示,新重建的PSF如图4-7所示。
图4-6 消除振铃后的图像图4-7 新重建的PSF由图可以看出,恢复后的图像消除了振铃的存在,但是,恢复结果仍有一定的失真。
4.1.3图像增强此处采用直方图均衡化来增强图像对比度。
图4-8为原始图像,图4-9为直方图均衡化后的效果图。
图4-8 原始图像图4-9为直方图均衡化后的效果图很明显地增强了图像对比度。
4.2车牌定位4.2.1垂直边缘检测对于垂直边缘,我们提出了自己的算法,能很好地去除大量非字符的垂直边缘,定位效果也较好。
图4-10给出了本文算法与Sobel算法、Prewitt算法的应用结果比较。
图4-10(a)为原始图像,图(b)为其灰度图像,图(c)为用sobel 垂直算子获得的垂直边缘图,图(d)用prewitt垂直算子获得的垂直边缘图,图(e)为用canny算子获得的边缘图,图(f)为使用本文算法获得的垂直边缘图,模板参数取m=2,n=12。
a.原始图像b.灰度图像c.Sobel算子处理的结果d.Prewitt算子处理的结果e.Canny算子处理的结果f.本文算法处理结果图4-10本文算法和经典算法的比较4.2.2(多次)形态学处理的粗定位一次形态学处理后的结果如若不理想,可进行第二次形态学处理,且结构元素大小可根据实际情况进行调整。
图4-11是运用该算法对图4-10(f)的垂直纹理图进行两次形态学处理的结果。
a.一次形态中腐蚀的结果b.一次形态中膨胀的结果c.二次形态中腐蚀的结果d.二次形态中膨胀的结果图4-11 运用该算法对图4-10(f)的垂直纹理图进行两次形态学处理的结果其中,由图d可看出除了目标车牌外,还有三个疑似车牌区,只实现了车牌的粗定位,因此还需要后续处理。
4.2.3合并邻近区域图4-12是运用该算法对另一幅图的处理结果。
a.原始图像b.一次形态后的粗定位图4-12由图中可以看出,由于车牌字符最后三个字符为111,在形态学处理后所得的相应区域与前面的四个字符断开了,从而被当做疑似车牌被该算法舍去了。
而合并邻近区域可很好的解决该问题。
即在形态处理时,根据字符间最大间距等先验知识对形态处理所得个疑似区域进行必要的合并。
图4-13显示合并邻近区域的结果。
图4-13 邻近区域合并的效果4.2.4基于车牌恒定宽高比的后续处理--精确定位运用数学形态学对该图进行处理后,得到多个车牌可能区域。
然后合并邻近区域,再根据车牌的长宽比k恒定等特征,提取出车牌区域。
其中,k值与许多实际因素有关,比如摄像机的物距、拍摄的角度等。
图4-14是的图4-10(a)车牌的精确定位和分割结果。
a.左侧车牌定位b.右侧车牌定位c.定位的左侧车牌d.定位的右侧车牌e.分割出的左侧车牌f.分割出的右侧车牌图4-14 图4-10(a)车牌的精确定位和分割结果图4-15是的图4-12(a)车牌的精确定位和分割结果。
a.定位的车牌b.分割出的车牌图4-15 图4-12(a)车牌的精确定位和分割结果4.2.5 基于颜色的车牌定位由于基于颜色的算法存在以下缺点:车牌有蓝底白字、黄底黑字、黑底白字等多种颜色格式,其中蓝底黑字牌照中的蓝色在各个省之间还有所不同。
而受天气、光照等影响,即便是同种颜色也容易幻化成各种不同的颜色。
因此,彩色信息可靠性较差,如作为主要的定位手段会导致车牌识别系统容易受外界干扰,稳定性较差。
图4-16是的图4-12(a)车牌的精确定位。
a.精确定位b.定位的车牌图4-16 基于颜色的车牌定位虽然如此,但一些地方还可以结合上述基于车牌纹理的定位法达到更好的效果。
4.3车牌预处理4.3.1车牌直方图均衡化方法及结果同4.1.3。
4.3.2基于Radon变换的倾斜校正将所分割车牌归一化,二值化后,为提高边缘的准确性以及抗干扰能力,采用最优的动态阈值canny边缘检测算子。
然后利用Radon变换进行倾斜校正。
图4-17显示了校正结果。
a.原始图像b.分割的车牌c.二值化d.采用canny所得的边缘图像图4-17基于Radon的倾斜校正4.3.3 判定(蓝底白字或者黄底黑字)及二值化原理:①黄底车牌G对B比例在1.2~1.8之间,而蓝底车牌G对B比例,在0.7~1.1之间;②车牌中字符像素占车牌所有像素的比列为0.3~0.4。
图4-18(a、b)显示了判定图4-14(e)(f)及二值化后的结果。
4.4字符的分割4.4.1 垂直投影法图4-18是图4-14(e)(f)左右两车牌二值化及垂直投影后的结果。
a.左车牌b.右车牌c.a 的垂直投影d.b 的垂直投影图4-18左右两车牌二值化及垂直投影后的结果4.4.2 分割字符算法:(1) 确定波谷:从左往右依次读取垂直投影值,先判断出第一个波峰,然后根据一般字符宽度的先验知识,去除伪波谷,找到相应的第一个波谷,这便是一个字符,以此往复,得到所有波谷。
(2) 去除“•”:各波谷间的距离若小于一般字符的最小宽度即可判断为是“•”,舍去。
(3) 取阈值:取所有波谷中的最大值为阈值。
(4) 分割字符:根据最终的阈值进行字符分割。
图4-19是最终的分割结果(以左车牌为例)。
图4-19 分割后的字符五 实验总结车牌自动识别系统一般包括车牌定位、字符分割和字符识别三个模块。
车牌定位很关键,它直接影响着后面两个模块的处理效果字符分割决定了字符识别的有效性字符识别是整个系统的核心,其算法的优劣最终决定了系统的可用性。
针对汽车牌照自动识别系统中图像效果差的问题,采取了降噪和增强处理,并提出了一种基于盲解卷积的图像复原算法,对模糊图像较好地进行了恢复。
然后给出了一种基于纹理、颜色并结合车牌字符间隔、字符宽度等先验知识的车牌定位方法,该方法经边缘检测获取垂直边缘图,结合形态学而粗定位车牌区域,然后根据车牌固有特征(宽高比、颜色等),来筛选出真正的车牌区域。
字符分割时采用投影法,并借助牌照字符固定宽度、间距的固定比例关系等先验知识实现字符的分割。
另外,我们对车辆自动识别系统涉及的相关算法作了深入地分析和比较,提出了自己的部分算法,具体包括基于车牌特征的车牌定位算法、基于Radon变换的车牌校正算法、基于投影特征和车牌先验知识相结合的字符分割算法等。
此外我们还对文中的大部分算法进行了试验,给出了实验结果。
而且,每个过程均考虑了如何对模糊车牌图像和模糊车牌字符进行处理。
最后对车牌识别各个过程进行综合,完成了车牌识别系统的软件实现。
六实验展望本文虽然在车牌识别原理与方法的探索上作了大量的工作,取得了一定的成果。
但是由于时间的限制,本文的研究还存在许多不足和应该改进的地方,后续研究可以从以下几个方面进行完善:(1)字符分割的研究中,对噪声干扰较大的牌照的字符分割的研究还有待于加强。
同时对于字符关键部位的断裂、粘连等,也干扰了对字符关键特征的提取,因此要进一步选择多特征来表征字符。
(2)不管是车牌定位还是字符分割算法,我们总是不可避免的使用一些经验参数来简化问题。
但考虑人眼观察车牌的事实--具有高度的自适应性:人眼的焦距会随物体的远近也随之调整并能轻而易举的定位或者识别车牌。
如何设计一个经验参数完全自适应的智能算法是一个巨大的挑战。
(3)进一步提高现有算法的速度、准确度、鲁棒性。
目前系统对拍摄环境要求较为苛刻,系统的识别率、识别速度也有待提高。
(4)丰富系统各方面的应用功能,如车辆行驶违章监控、监测黑牌机动车等,并将软硬件结合起来,实现一个完整的智能车辆监控系统并把系统应用到实际中去来检验算法的可靠性,让系统脱离实验室的环境,使其不断得到升级和发展。