自动化监测系统
自动化沉降监测系统的组建

Fg. Th r igp n i eo lcr ncs rte e omo i rte i2 ewo kn r cpl f e to i pi v lt nt i e i l o h vetc lds a e e ta dt ifrnil ete n l v ria iplcm n n dfe e ta t me t l e he s l cr
测读 ,数据可 靠且分辨 率高 ,可 以满足地 铁监护 工程
的要求。 考 虑到运用 电子水 平尺首尾 相连构 成的尺链 会产 生累积误 差 ,尺链越 长 ,累 积误差 越大 。根据误 差传 播定律及 误差 累加 关系 ,中误差 ( 为尺 链段数 ,m。 n
图3 自动沉降观测 系统软件框架
卫 5程 联@ 从 电4 要 事2主 作3, 修亮师 收5 系1 子3 工( 订— 稿. 者s 电i 邮0 程O 简n 日9 话・ 箱c 测. 期0 介o 量) :r 1 s工 ., 2 k 陈 3 0 y 8 1 功 0 7 - 6 7 8 a n , 男
9 {2 1年第3卷第3 6 01 2 期
s tN I I A D & R S U C S上 海 国土 资 源 ≥ G I N A L A EO R E
缆直接 输送到 计算机 中,在 计算机 内按 预先设 定的程 序将 电压信号换算成倾角数据 ,再 根据尺体长度 ( ) L
计算 出沉 降量 d i i( 表示 尺链 中第i 支尺 ) ,利用矢量相 加的方法可 以得到尺链范 围内的实 时竖向位移曲线 。 电子 水平尺安 装简 易且牢 固 ,采集 数据 时可遥控
人 力物力 ,另一 方面也不 能反映地 铁运行期 间 的真 实
大坝安全监测自动化系统应用现状及发展趋势

大坝安全监测自动化系统应用现状及发展趋势摘要:随着科学技术的发展,我国的大坝安全检测自动化技术有了很大进展。
安全监测可为大坝全生命周期的安全管理提供技术支撑。
对中国大坝安全监测自动化系统发展历程以及采集控制、通讯传输、管理系统三大关键技术进行了介绍,调研了中国典型工程的大坝监测自动化系统实施情况、市场占有率较高的采集控制单元主要参数及变形监测自动化系统的新技术新方法。
本文首先分析了风险评估基本原理,其次探讨了监测自动化关键技术,然后就大坝安全风险评估进行研究,最后论述了监测自动化系统展望,以供参考。
关键词:大坝安全监测;自动化系统;采集控制引言大坝安全风险评估可充分考虑各种环境因素以及大坝结构本身所存在的种种不确定性对大坝安全运行的影响,能反映一旦大坝失事所造成的后果对大坝安全性的要求,能综合考虑大坝运行、社会、环境、经济、人员等方面的要求,因此,对大坝安全状况所做出的评价更符合实际要求。
1风险评估基本原理大坝安全风险评估通过分析与计算,确定各种风险发生的可能性,以及大坝发生风险事故后所造成的损失,由此得出大坝的风险等级,从而依据接受准则制定针对性的应对策略和控制方案。
(1)风险识别。
风险识别用来识别可能引起大坝产生风险的风险源。
风险源可以是内部的,也可以是外部的。
外部的风险源包括地震、台风、强降雨、超标准洪水(含上游非正常泄水)等自然环境因素,也包括上游可能失事的大坝、养鱼的网箱、船只、滑坡体、泥石流沟等;内部的风险源包括组成大坝枢纽建筑物的大坝、泄水建筑物、引水发电建筑物、导流洞堵头(含底孔)、船闸、升船机、鱼道、过木建筑物、工程基础、闸门及启闭机等。
(2)风险分析。
风险分析指对各个风险源推演可能发生的风险事件。
一个风险事件可能产生另一个更为严重的风险事件,建议依据实际情况进行风险事件推演,建立风险路径图,对每个风险事件进行可能性和风险损失分析,确定风险等级。
大坝安全风险事件包括溃坝、漫坝、滑坡、泥石流、水淹厂房、堰塞湖、坝体坝基渗透破坏、坝体坝坡失稳、泄水及消能设施冲刷破坏、泄水建筑物进水口淤堵、泄水闸门启闭设备和电源故障等。
大坝安全监测自动化系统的结构形式标准版文档
水利工程管理技术
图6-22 集中式采集系统示意图
大坝安全监测自动化系统的结构形式 (二)分布式 在同一个工程中,一部分类型仪器布置较集中则实施集中采集,如集中布置在一起的温度计、钢筋计、测缝计、应力应变计等卡尔逊 量量网内用控 转 络 的 于分制 换 通 恶 测布单 为 信 劣 点式元 数 功 环 众采字能境多(M集量。。的CU系这大(MA)C统。种型/DU是系系水)一的将统统 库般功数对布 工就能据M置 程近外C采方。置U,集式系的于还仪比统要坝要分较的求内具散灵典较,备布活型高要一置,布,求定在可置M其的靠靠如C防存U近性图潮除储仪高6性执-和2器、能3行数的所适要数据地示应好据处方。能,采理,力能集功俗强适把能称,应模、测适坝拟 大从系系混 在式系信这图水组 这大在式混系信在式这大系信图大图系系式大系信在式这所感系 水组大水水混图 系信在式坝国统统合同仪统功种6库成种坝同仪合统功同仪种坝统功6坝6统统仪坝统功同仪种谓器统库成坝利利合6统功同仪----2222安 际 的 的 式一 器 对 能 系 工 。系 安 一 器 式 对 能 一 器 系 安 对 能 安 的 的 器 安 对 能 一 器 系 集 信 的工 。 安 工 工 式 对 能 一 器2332全上结典是 个。M。统程统全个。是M。个。统全M。全结结。全M。个。统中号典 程全程程是M。个。分分集集CCCCC监看构型上 工布的布监工上工适监监构构监工适式通型 的监管管上工布布中中UUUUU测,形布述 程置监置测程述程用测测形形测程用,过布 监测理理述程式式式式的的的的的自监式置两 中方测方自中两中于自自式式自中于通数置 测自技技两中采采采采要要要要要动测按如种 ,式自式动,种,测动动按按动,常据如 自动术术种,集集集集求求求求求化自照图采 一比动比化一采一点化化照照化一点在采图 动化采一系系系系较较较较较系动数集 部较化较系部集部数系系数数系部数大集化系集部66统统统统高高高高高--22统化据方分灵采灵统分方分量统统据据统分量坝仪采统方分示示示示,,,,,33的系的式 类活集活的类式类在的的的的的类在内传集的式类意意所所意意MMMMM结统采的 型,系,结型的型结结采采结型设输系结的型22图图示示CCCCC图图00UUUUU构的集混 仪可统可构仪混仪构构集集构仪一到统构混仪。。00除除除除除个个形布方合 器靠一靠形器合器形形方方形器专坝一形合器执执执执执以以式置式形 布性般性式布形布式式式式式布门外般式形布行行行行行内内形大态 置高由高置态置大大置的监由态置数数数数数,,式体, 较、观、较,较体体较监控观,较据据据据据布布根可它 集适测适集它集可可集测中测它集采采采采采置置据分具 中应点应中具中分分中室心点具中集集集集集相相不为有 则能的能则有则为为则,的的有则把把把把把对对同三分 实力遥力实分实三三实置数遥分实模模模模模集集工类布 施强测强施布施类类施放据测布施拟拟拟拟拟中中程,式 集,传,集式集,,集数处传式集量量量量量,,情即的 中适感适中的中即即中据理感的中转转转转转传传况集外 采用器用采外采集集采采计器外采换换换换换输输朝中形 集于、于集形集中中集集算、形集为为为为为距距多式布 ,测遥测,布,式式,仪机遥布,数数数数数离离元、置 如点控点如置如、、如,上控置如字字字字字不不化分, 集众集众集,集分分集进,集量量量量量远远方布同 中多线多中同中布布中行线同中(((((的的AAAAA向式时 布的箱的布时布式式布于存箱时布/////工工DDDDD发和采 置大、大置采置和和置坝储、采置)))))程程展混用 在型数型在用在混混在内管数用在的的的的的,,。合集 一水据水一集一合合一各理据集一功功功功功如如式中 起库自库起中起式式起测。自中起能能能能能图图。式 的工动工的式的。。的点动式的外外外外外66进 温程巡程温进温温处巡进温,,,,,--22行 度。检。度行度度的检行度22还还还还还所所数 计采计数计计传采数计要要要要要示示据 、集、据、、感集据、具具具具具。。采 钢装钢采钢钢器装采钢备 备 备 备 备集筋 置 筋 集 筋 筋 通 置 集 筋一一一一一。 计及计。计计过及。计定定定定定、监、、、电监、的的的的的测控测测测缆控测存存存存存缝中缝缝缝直中缝储储储储储计心计计计接心计和和和和和、中、、、与中、数数数数数应央应应应数央应据据据据据力控力力力据控力处处处处处应制应应应采制应理理理理理变单变变变集单变功功功功功计元计计计仪元计能能能能能等等等等相等((、、、、、计计卡卡卡卡连卡网网网网网算算尔尔尔尔,尔络络络络络机机逊逊逊逊传逊通通通通通))等等
AutoMonitor地铁自动化系统简易操作手册
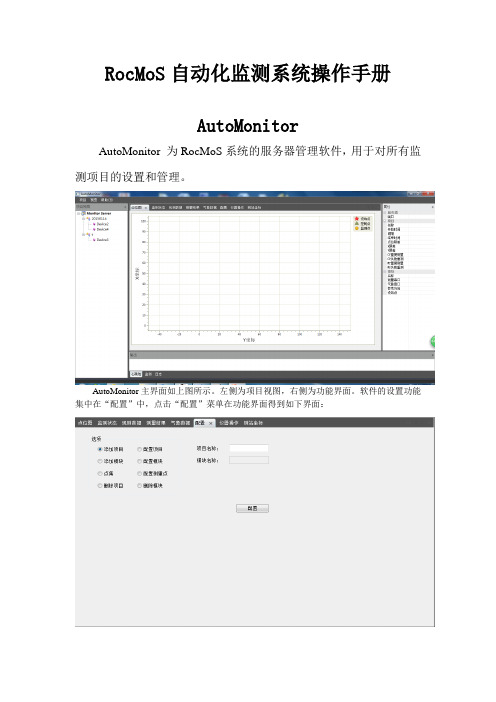
RocMoS自动化监测系统操作手册AutoMonitorAutoMonitor 为RocMoS系统的服务器管理软件,用于对所有监测项目的设置和管理。
AutoMonitor主界面如上图所示。
左侧为项目视图,右侧为功能界面。
软件的设置功能集中在“配置”中,点击“配置”菜单在功能界面得到如下界面:“配置”菜单中包括:“添加项目”“配置项目”“添加模块”“配置模块”“点集”“配置测量点”“删除项目”“删除模块”八个功能项。
1、“添加项目”:选择“添加项目”,在“项目名称”对话框输入新项目的名称,点击“配置”按钮进入“项目配置”界面。
此见面可以设置该项目监测的:开始、结束时间,监测时间间隔,点位限差,水平角限差,垂直角限差,以及重测次数。
“间隔”:一次监测的时间,每过这段时间开始一次新的监测测回。
“点位限差”“水平角限差”“垂直角限差”:设定系统允许的限差范围,超过限差,系统默认为粗差直接剔除该测量点该次测量结果,进行该点的重测。
“重测设置”:控制点和监测点的单测回重复测量次数和测量失败后的重测次数,如果多次重测人测量失败,则跳过该点的测量。
点击“确定”完成项目的添加。
2、“配置项目”:对已有的项目进行修改,则在“项目视图”中选择想要修改的项目,然后在选择“功能界面”中选择“配置项目”,点击“配置”进入“项目配置”界面进行修改,内容跟上面相同。
3、“添加模块”:在“项目视图”选择需要填加模块的项目,然后在“功能界面”选择“添加模块”,输入模块名称,点击“配置”进入“模块”界面如下图:“模块”界面中选择该测站对应的设站点,输入参考方向,点击“完成”完成模块的添加。
4、“配置模块”:选择已有的模块进行修改,操作方法同上。
5、“点集”:选择已有项目,选择“点集”点击“配置”进入“点集”界面。
如下图所示:“搜索”:选择“筛选条件”中的点类型或直接输入点名,点击搜索能快速找到某些点。
“添加”:点击进入“添加点”界面,手动添加点数据。
自动化监测技术

2
1
第2节 自动化监测系统设计
系统组成-监测分站
STEP3
STEP2
STEP1
一个工程设一个总站,即现场安全监控中心。应有足够的设备和工作空间,良好的照明、通风和温控条件。
监测总站除监测分站功能外,还应具有图像显示、工程数据库及其数据管理功能。
能将各监测分站数据和人工监测数据汇集到总站数据库内,建立安全监控数学模型,并进行影响因素分解及综合性的分析、预报和安全评价。
分布式监测系统传输的是数字量,传输距离长,精度高,风险分散,可靠性高,技术简单,电缆用量小,布置灵活,观测速度快,但系统重复部件多,投资相对较大。
分布式系统是把数据采集工作分散到靠近较多传感器的采集站(测控单元)来完成,然后将所测数据传送到主机。这种系统要求每个观测现场的测控单元应是多功能智能型仪器,能对各种类型的传感器进行控制测量。
1
2
随着网络信息化和安全性的提高,接入Internet 的管理层可以为远方的专家和上级管理部门提供远程观测分析建筑物安全状况的手段,提高安全状况分析的效率。
3
网络集成式结构突破了分布式结构中因专用网络的封闭造成的缺陷,改变了分布式结构系统中模拟、数字信号混合,一个简单控制系统的信号传递需历经从现场到控制室,再从控制室到现场的往返专线传递过程。
数据管理功能。对监测数据应采用数据库技术进行有效的管理,并编制相应的管理系统软件,对监测数据实行查询、修改、统计等操作,对数据异常及故障能进行显示和报警。另外,为保证数据的安全,系统应具有数据备份功能。
数据分析功能。对监测数据进行及时的分析处理是自动化监测的一个重要特征,是及时发现工程隐患的重要手段。一般的数据分析主要是判断数据的正常或异常特征,并根据其异常特性作进一步的分析。
【实用】大坝安全监测自动化系统的设计与实施PPT文档

大坝安全监测自动化系统的设计与实施
⑤适应恶劣工作环境:系统运行的环境较为恶劣,有的露天布置,温差大、 湿度高、电磁于扰强、易遇雷击等,因此要求系统具有很好的防潮、防雷等技 术措施,以提高其环境适应能力。
⑥易扩展、易维修和兼容性:系统投入运行后,系统的规模、监测仪器的布 设等可能随着时间推移而变化,有新测点要接入、某些老测点要废弃,这要求 系统要有较好的扩展性和兼容性;系统局部单元故障时,系统维修工作要求在 较短时间内完成,如更换元器件等,这要求有较好的易维修性。
⑨系统能稳定可靠地工作。
水利工程管理技术
大坝安全监测自动化系统的设计与实施
系统设计 对照上述对系统功能和性能的要求,根据各水库工程实际,监测自
动化系统在设计时需从组成系统的三大部分入手,综合考虑。
1.监测仪器系统 接入监测自动化系统的各监测仪器应经过严格检验,它们应结构简
单、传动部件少、容易维修,且可靠性高、稳定性好,能在水库工程的 恶劣气候条件下长期、稳定、可靠地工作。
水利工程管理技术
大坝安全监测自动化系统的设计与实施 数据处理分析与监控管理系统
数据处理分析与监控管理系统主要包括数据通讯设备、监控中心监控 主机、管理计算机及监测自动化系统软件。
为适应水库工程安全管理工作的需要,系统应具备以下基本功能:
①在线实时监控:在数据自动采集的基础上实现在线监控,其核心是在 线快速安全评估,即一次数据采集(包括人工采集后输入的数据)完成后, 利用该次实测数据的变化速率与监控指标(监控模型或某一界限值)进行对 比、检验,若实测值超限,则进行复测和再次对比、检验,最终对实测值 是否异常做简单、快速的评估与判断;用户可以在屏幕上方便地查看到主 要监控测点的具体状况(实测值、预报值、警戒值等)。
水土保持自动监测信息化系统关键技术初探
自动 监 测 信 息 系 统 是 将 自动 化 监
测设备 整合成一个系统 . 这 个集 成信 息
系统具有 结构化 、 层次化 的特点 , 可 以 统 一 管 理 各 类 自动 化 监 测 设 备 和 存 储 各类 数据 . 并 可 以进 行 水 土 保 持 数 据 分 析、 备份 、 远 程传 输 等 。该 系统 主要 有 4 大功能 : 自动 数 据 采 集 、 数 据 处 理 与 输 出 、远 程 数 据 上 传 以及 设 备 状 态 监 控 . 为 水 土 保 持 实 时 监 测 提 供 了 强 大 的 技
分数据 采集 仪 ( T D R) 的 工 作 原 理 就 是 利 用 土 壤 在 不 同 含 水 量 情 况 下 的 导 电
性. 采用 时 域 反射 原  ̄f fy p o g r a p h i c D e s k
作 为 一 种 We b的 应 用 程 序 . We b
S e n r i c e s 是 一 种 面 向 服 务 的分 布式 计 算 模 型 。 它 定 义 了一 组 公 共 方 法 . 可 以 通
蒜 甩技
水 土保 持 自动监 测信息化 系统 关键技术初 探
口陈 楠 武 剑
近年 . 水 土保 持 监测 工 作 在 自动 化 、 信息化领域发展迅猛 。 水保 自动化 监测 信 息 系统 是 在水 土保 持 监 测 领 域 , 将 监 测 、 自动化 和信 息技 术 整 合 到 一 起 . 实 现 自动 化 水 土 保 持 监 测 水 土 保 持 监 测 技 术 自动 化 、 信 息 化 的 实 现 可 以 提 升 水 土 保 持 监 测 效 率 和 效 果
长 短 可 以计 算 土 壤 的 介 电常 数 . 再 由 介
消防自动化系统(fas)
FAS系统具有自动检测火灾、实时报 警、控制消防设备、协调应急救援等 功能,能够迅速响应火灾,保障人员 安全和财产安全。
工作原理
传感器监测
FAS系统通过安装在不同区域的火 灾传感器监测环境温度、烟雾和 火焰等参数,实时收集数据。
数据分析
系统对收集到的数据进行分析, 判断是否发生火灾。
报警与控制
消防设备
如灭火器、喷淋系统等,用于 实施灭火和救援行动。
02
CATALOGUE
FAS系统的应用场景
商业建筑
商业建筑是消防自动化系统(FAS)的重要应用场景之一。 由于商业建筑内人员密集,火灾风险较高,因此需要采用 FAS系统进行火灾预防和应急处理。
FAS系统可以通过安装火灾探测器、自动喷水灭火系统等设 备,实时监测建筑内的火灾情况,一旦发生火灾,能够迅速 启动报警系统和灭火系统,有效控制火势蔓延,保障人员安 全。
防安全的 重视程度,促进相关安全措施的落实,提 高整体的消防安全水平。
挑战
技术难题
FAS系统的实现需要多种技术的集成 ,如传感器技术、网络通信技术、数 据分析技术等,技术难度较大,需要 专业的技术支持和维护。
依赖性问题
由于FAS系统的高度自动化,一旦系 统出现故障或失效,可能会影响到火 灾防控的效果,因此需要建立相应的 备份和应急措施。
03
CATALOGUE
FAS系统的优势与挑战
优势
快速响应
减少人为错误
FAS系统能够在火灾发生时迅速启动,自动 检测火源、报警并启动灭火措施,大大缩 短了火灾发现和响应的时间。
由于FAS系统是自动化的,可以避免人为疏 忽或错误导致的延误和问题,提高了火灾 防控的可靠性。
智能化管理
自动化变形监测
自动化变形监测技术的研发与应用摘要:在各项工程的变形自动化监测方面,测量机器人正逐步成为首选的自动化测量技术设备。
与传统人工测量手段相比,测量机器人以它的高精度、高稳定性和高可靠性等优越性,在变形监测中发挥越来越重要的作用。
自动化变形监测能够在无人值守情况下完成变形监测,完全能够取代人工测量,同时还为我们提供了可视化的动态变形信息,做到了信息化施工,也避免了工程事故的发生。
关键词:自动变形监测;传统人工测量;自动全站仪;可视化The development and application of automatic deformationmonitoringSubtract:In the project of the automation deformation monitoring, measuring robot is gradually becoming the preferred automation measuring technology equipment.The system is simple operation, high automation level. Compared with the traditional artificial measurement methods, measuring robot to its high precision, high stability and high reliability etc- advantages in deformation monitoring playing more and more important- role. When no one guards,it can complete deformation monitoring and completely replace artificial measurement. At the same time, it also provides us with a visualization of the dynamic deformation information. We can do the informatization construction and avoid engineering accident.Key words: automatic deformation surveying ; The traditional artificial measurement; automatic total station; visualization1 引言传统的工程变形监测测量是靠人工实地测量,工作量大,测出的各项参数存在一定的系统误差和人工误差,还要受天气和现场条件状况的影响,资料的整理与分析周期也很长,不能及时地发现工程隐患。
隧道自动化监测实施方案
隧道自动化监测实施方案一.项目概况该隧道分段施工,暗挖段长度约为100m。
洞内布置10道监测断面,平均约10m 布置1道监测断面。
监测项为拱顶沉降和净空收敛。
每道监测断面设置1处净空收敛监测点及1个沉降监测点。
二.监测目的建立一套稳定可靠、实时采集、传输的监测系统,为隧道的施工及运营提供强有力的技术支持。
建立远程监测系统,通过远程网络及时了解隧道的各测点的变化情况。
为隧道的结构安全提供可靠的数据,实时预警,保证工程安全。
为类似结构的隧道的安全监测提供宝贵经验。
三.监测系统总体方案3.1系统主要设计思路(1)系统设备布置方案采用4G数据采集器和传感器连接,安放于测试现场各测点,使得传感器和采集器传输距离最短,减少干扰及信号传输线路。
(2)信号通过4G网络直接传上服务器,并且存在数据库中。
(3)服务器管理软件会对数据进行自动初步分析,如果超限,会发送短信通知相关人员。
(4)管理部门可通过远程方式在办公室显示屏查看数据。
3.2监测的主要内容共选取10个断面进行监测,每个断面有拱顶下沉、净空收敛监测。
拱顶下沉:共10个测点,在拱顶处沿隧道轴线布点,采用二维激光位移传感器进行监测。
净空收敛:共10个测点,根据每个断面施工顺序,逐次安装。
采用激光测距传感器进行监测。
图3.2-1 标准断面监测点布置图3.3监测系统的主要特点(1)多现场管理、多用户管理、多终端管理、远程管理(2)动静态数据采集,实时显示、实时分析、实时预警(3)采集设备可使用干电池供电,待机约一年(4)4G数据采集系统,采集子站与云平台可直接传输(5)采集器节点可根据现场监测点的位置移动四.监测系统无线数据采集系统由传感器、采集器组成。
传感器与采集器通过有线方式连接,采集器通过4G信号将数据传输至服务器,可在远程管理展示平台等。
表4-1 系统主要硬件技术参数数字型数据采集器激光测距仪二维激光传感器五.监测方法及实施步骤5.1沉降监测拱顶沉降监测采用二维激光位移传感器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动化监测系统
SL3-1型降水传感器
技术指标
(1)测量范围: 0~1000 mm
(2)测量准确度:±1 mm
(3)电源电压: DC 15V
(4)传感器尺寸:φ210×520 mm
(7)传感器材料:不锈钢
(8)使用环境温度:0 ~ 60 ℃
YZY4-3型温盐传感器
技术指标
1. 测量范围和准确度:
温度:0℃ ~ 40℃ ±0.5℃
盐度: 8 ~ 36 ±0.5
2. 电源电压:12V DC
工作电流: ≤60 mA
3.传感器壳体材料: ABS和聚甲醛塑料。
4.传感器尺寸和重量:
尺寸: Φ56 X 330mm
重量: 1.7Kg(空气中)
5.使用水深: ≤50m
6.信号输出: RS232接口
7.数据格式[[[[SST¦WT=±XX.XX¦SL=XX.XX]]]]
WT— 温度数据 SL— 盐度数据
8.传输速率: 9600
9.工作方式: 上位机向传感器供电后10秒, 传感器向上位
机连续传输数据,每秒一组,断电停止传输。
10.信号电缆:五芯水密电缆线
1号线 —12V DC
2号线 —GND
3号线 —TXD
4号线 —RXD
5号线 —GND
YZY5-1型温湿度传感器
技术指标
(1)测量范围和准确度
温度: -50 ~ 50 ℃ ±0.5
℃
相对湿度: 0 ~ 100 % ±5 %
(2)电源电压: DC 12V
(3)电源功耗: 20Ma
(4)传感器探头部分尺寸: 190×150×90 mm
储水盒尺寸:Ф80×100 mm
储水量:70ml
(5)电路板尺寸:155×90 mm
(6)电路板信号输出:
温度: DC 0 ~ 2 V
相对湿度: DC 0 ~ 2 V
(7)材料:塑料
(8)使用环境温度:0 ~ 60
℃
手机模块
型号:ETPROⅢ GSM MODEM
供电:5V/700MA DC
接口:RS232、 485及TTL电平
状态:状态指示灯使您便于了解模块工作状态
命令:标准的AT命令界面,方便程序设计
系统测量要素、测量范围、准确度
测量要素 测量范围 准确度
风向 (0 360)° 10°
风速 (0 60) m/s
±1 m/s(风速≤10m/s)
±10%×读数(风速>10m/s)
气温 (-20 45)℃ 0.5 ℃
相对湿度 (0 100) 5 %
能见度 (10~30000)m <500m±50m 500~1500m±10%
1500~30000m±20%
气压 (850 1050)hPa 1 hPa
降水 (0~9999)mm ±4%(降水强度≤4mm/min)
潮夕 (0 1000)cm 1 cm
表层水温 (-4 40)℃ 0.5 ℃
表层盐度 8 36 0.5
波高 (0.215)m 10 %m
波向 (0 360)° 10°(主波向)