2019年全国大学生电子设计竞赛赛题A题_电动小车动态无线充电系统
2019电赛仪器仪表类题目

2019电赛仪器仪表类题目
2019年全国大学生电子设计竞赛的仪器仪表类题目共分为三道,题目内容与要求如下:
1. 题目一:超声波测距与避障系统
要求参赛者制作一个能够实时检测前方障碍物距离,并自动调整运动方向以实现避障的智能小车。
具体要求如下:
小车需能够自动检测前方1m范围内的障碍物,并发出声、光报警信号;小车在检测到障碍物后,应能够自动减速并调整运动方向,以实现避障;小车应能够通过无线模块将检测到的障碍物距离信息发送至手机APP。
2. 题目二:智能温湿度控制系统
要求参赛者制作一个能够实时监测并调节室内温湿度的智能控制系统。
具体要求如下:
系统应能够通过传感器实时监测室内温湿度,并将数据发送至手机APP;系统应能够根据用户设定的温湿度范围自动调节空调、加湿器等设备的运行状态,以保持室内环境舒适;
系统应具备语音提示功能,能够实时播报室内温湿度信息。
3. 题目三:智能音频分析仪
要求参赛者制作一个能够对音频信号进行实时采集、分析和处理的系统。
具体要求如下:
系统应能够通过音频接口实时采集音频信号;
系统应能够对采集到的音频信号进行频谱分析、噪声去除、语音识别等处理;
系统应具备可视化界面,能够实时显示音频信号的波形、频谱等信息;
系统应具备语音合成功能,能够将处理后的音频信息以语音形式输出。
以上为2019年全国大学生电子设计竞赛仪器仪表类题目的简要介绍,建议查看全国大学生电子设计竞赛官网获取更多信息。
2019年陕西理工大学”华为杯“电子设计竞赛题目

负载2019 年陕西理工大学电子设计竞赛试题微电网模拟系统(A 题)一、任务设计并制作由两个三相逆变器等组成的微电网模拟系统,其系统框图如图 1 所示,负载为三相对称 Y 连接电阻负载。
+- +-交流母线图 1 微电网模拟系统结构示意图二、要求1.基本要求(1)闭合 S ,仅用逆变器 1 向负载提供三相对称交流电。
负载线电流有效值 I o ,2A 时,线电压有效值 U o 为 24V ±0.2V ,频率 f o 为 50Hz±0.2Hz 。
(2)在基本要求(1)的工作条件下,交流母线电压总谐波畸变率(THD ) 不大于 3%。
(3)在基本要求(1)的工作条件下,逆变器 1 的效率 ƞ 不低于 87%。
(4)逆变器 1 给负载供电,负载线电流有效值 Io 在 0~2A 间变化时,负载调整率 SI1≤0.3%。
2.发挥部分 (1)逆变器 1 和逆变器 2 能共同向负载输出功率,使负载线电流有效值 Io 达到 3A ,频率 fo 为 50Hz±0.2Hz。
(2)负载线电流有效值 Io 在 1~3A 间变化时,逆变器 1 和逆变器 2 输出功率保持为 1:1 分配,两个逆变器输出线电流的差值绝对值不大于 0.1A 。
负载调整率 SI2≤0.3%。
(3)负载线电流有效值 Io 在 1~3A 间变化时,逆变器 1 和逆变器 2 输出功率可按设定在指定范围(比值 K 为 1:2~2:1)内自动分配,两个逆变器输出线电流折算值的差值绝对值不大于 0.1A 。
S逆变器2直流电源2逆变器1直流电源1(4)其他。
三、说明(1)本题涉及的微电网系统未考虑并网功能,负荷为电阻性负载,微电网中风力发电、太阳能发电、储能等由直流电源等效。
(2)题目中提及的电流、电压值均为三相线电流、线电压有效值。
(3)制作时须考虑测试方便,合理设置测试点,测试过程中不需重新接线。
(4)为方便测试,可使用功率分析仪等测试逆变器的效率、THD 等。
2019年全国大学生电子设计竞赛赛题J题_模拟电磁曲射炮

2019年全国大学生电子设计竞赛试题参赛注意事项(1)8月7日8:00竞赛正式开始。
本科组参赛队只能在【本科组】题目中任选一题;高职高专组参赛队在【高职高专组】题目中任选一题,也可以选择【本科组】题目。
(2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。
(3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生身份的有效证件(如学生证)随时备查。
(4)每队严格限制3人,开赛后不得中途更换队员。
(5)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设计制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违纪参赛队取消评审资格。
(6)8月10日20:00竞赛结束,上交设计报告、制作实物及《登记表》,由专人封存。
模拟电磁曲射炮(J题)【高职高专组】一、任务自行设计并制作一模拟电磁曲射炮(以下简称电磁炮),炮管水平方位及垂直仰角方向可调节,用电磁力将弹丸射出,击中目标环形靶(见图3),发射周期不得超过30秒。
电磁炮由直流稳压电源供电,电磁炮系统内允许使用容性储能元件。
引二、要求电磁炮与环形靶的位置示意如图1及图2所示。
电磁炮放置在定标点处,炮管初始水平方向与中轴线夹角为0°、垂直方向仰角为0°。
环形靶水平放置在地面,靶心位置在与定标点距离200cm≤d≤300cm,与中心轴线夹角a≤±30°的范围内。
1.基本要求(1)电磁炮能够将弹丸射出炮口。
(2)环形靶放置在靶心距离定标点200~300cm间,且在中心轴线上的位置,键盘输入距离d值,电磁炮将弹丸发射至该位置,距离偏差的绝对值不大于50cm。
(3)环形靶放置在中心轴线上,用键盘给电磁炮输入环形靶中心与定标点的距离d,一键启动后,电磁炮自动瞄准射击,按击中环形靶环数计分;若脱靶则不计分。
2.发挥部分(1)环形靶位置参见图2,用键盘给电磁炮输入环形靶中心与定标点的距离d及与中心轴线的偏离角度a,一键启动后,电磁炮自动瞄准射击,按击中环形靶环数计分;若脱靶则不计分。
2019年全国电子设计大赛C题_线路负载及故障检测装置

2019年全国大学生电子设计竞赛试题参赛注意事项(1)8月7日8:00竞赛正式开始。
本科组参赛队只能在【本科组】题目中任选一题;高职高专组参赛队在【高职高专组】题目中任选一题,也可以选择【本科组】题目。
(2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。
(3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生身份的有效证件(如学生证)随时备查。
(4)每队严格限制3人,开赛后不得中途更换队员。
(5)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设计制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违纪参赛队取消评审资格。
(6)8月10日20:00竞赛结束,上交设计报告、制作实物及《登记表》,由专人封存。
线路负载及故障检测装置(C 题)【本科组】一、任务设计并制作线路负载及故障检测装置,示意图如图1所示。
检测装置只通过两个连接端子与两根导线连接。
导线上A 、B 两点距离各自连接端子约5cm ,远端30cm 范围内为连接负载和故障区域。
负载由电阻(额定功率0.25W )、电容(耐压16V )和电感(额定电流50mA )3个元件中任意2~3个元件串联或者并联组成。
其中电阻值范围:200Ω~2kΩ,电容值范围:200nF~2μF ,电感值范围:100μH~1mH 。
检测装置由5V 单电源供电,能实时检测和显示负载网络结构,负载开路、短路故障报警,以及短路故障点位置测量。
响应时间不大于5s 。
图1 线路负载及故障检测装置示意图二、要求20cm30cm负载导线10cmA B负载及故障检测装置1.基本要求(1)具有负载开路和短路故障分别指示的报警功能。
(2)测试现场给出电阻、电容和电感3个元件,分别测量每个元件值并稳定显示,相对误差的绝对值不大于5%。
每个元件测量时间不大于5s。
(3)可检测由给定电阻、电容和电感3个元件中,任意2~3个元件串联或者并联组成负载的网络结构。
全国大学生电子设计竞赛C题

目录摘要 (3)1•设计任务及要求 (4)1.1设计任务 (4)1.2设计要求 (4)2.系统方案 (5)2.1控制模块的论证与选择 (5)2.2电源模块的论证与选择 (5)2.3小车车体的论证与选择 (6)2.4电机模块的论证与选择 (6)2.5电机驱动模块的论证与选择 (6)2.6寻迹模块的论证与选择 (7)2. 7避障模块的论证与选择 (7)2.8显示模块的论证与选择 (7)2. 9按键模块的论证与选择 (8)2. 10通信模块的论证与选择 (8)2. 11方案选定 (9)3.系统的理论分析与计算 (10)3.1系统的信号检测与控制 (10)3. 1. 1系统的信号检测 (10)3.1.2系统的信号控制 (10)3.2两车之间的通信方法 (11)3.3节能 (11)4.电路与程序设计 (12)4.1电路的设计 (12)4. 1. 1系统总体框图 (12)4. 1.2控制器的电路设计 (13)4. 1.3稳压电源的电路设计 (13)4. 1.4电机驱动电路的设计 (14)4.2程序的设计 (15)4. 2.1程序功能描述与设计 (15)4. 2.2程序流程图 (16)5.测试方法与测试结果 (19)5.1测试方案 (19)5.2测试条件与仪器 (19)5.3测试结果及分析 (19)5. 3. 1测试数据 (19)5. 3.2测试分析与结论 (19)參考文献 (17)附录1 (18)附录2 (19)附录3 (20)• •智能小车的设计摘要:本作品以低功耗的ATmegal6单片机为控制核心;MP2307稳压电路供电; 使用光电传感器寻线和避障;LN298N驱动电机;以光电传感器来实现甲乙两车之间的通信;结合了PWM调速等技术,设计了一组智能小车。
该小车的车体由控制、电源、按键、小车硬件、电机、电机驱动.寻迹、避障、显示和光电传感通信等十个模块组成,可用于无人驾驶、自动探测等人工智能领域。
关键字:ATmegal6. MP2307.光电、LN298N1.设计任务及要求1-1设计任务甲车车头紧靠起点标志线,乙车车尾紧靠边界■甲、乙两辆小车同时起动,先后通过起点标志线,在行车道同向而行,实现两车交替超车领跑功能。
2019 年全国大学生电子设计竞赛综合测评题资料讲解

2019年全国大学生电子设计竞赛综合测评题综合测评注意事项(1)综合测评于2019 年8 月19 日8:00 正式开始,8 月19 日15:00 结束。
(2)本科组和高职高专组优秀参赛队共用此题。
(3)综合测评以队为单位采用全封闭方式进行,现场不能上网、不能使用手机。
(4)综合测评结束时,制作的实物及《综合测评测试记录与评分表》由全国专家组委派的专家封存,交赛区保管。
多信号发生器使用题目制定综合测评板上的一片LM324AD(四运放)和一片SN74LS00D(四与非门)芯片设计制作一个多路信号发生器,如下图所示。
设计报告应给出方案设计、详细电路图、参数计算和现场自测数据波形(一律手写),综合测评板编号及3个参赛同学签字需在密封线内,限2页,与综合测评板一同上交。
u o1U o1————方波U o2————占空比连续可调窄脉冲U o3————正弦波U o4————余弦波一.约束条件1.一片SN74L.S0OD四与非门芯片(综合测评板上自带);2. 一片LM324AD四运算放大器芯片(综合测评板上自带);3.赛区提供固定电阻、固定电容、可变电阻元件(数量不限、参数不限);4.赛区提供直流电源。
二.设计任务及指标要求利用综合测评板和若干电阻、电容元件,设计制作电路产生下列四路信号:1.频率为19kHz~2IkHz连续可调的方波脉冲信号,幅度不小于3.2V;2.与方波同频率的正弦波信号,输出电压失真度不大于5%,峰-峰值(Vpp)不小于1V;3.与方波同频率占空比5%~15%连续可调的窄脉冲信号,幅度不小于3.2V;4.与正弦波正交的余弦波信号,相位误差不大于5°,输出电压峰-峰值(Vpp)不小于1V。
各路信号输出必须引至测评板的标注位置并均需接1kΩ负载电阻(R L),要求在引线贴上所属输出信号的标签,便于测试。
三.说明1.综合测评应在模电或数电实验室进行,实验室提供常规仪器仪表和工具;2. SN74LS00D和LM324AD芯片使用说明书随综合测评板并提供;3.参赛队应在理论设计基础上进行实验调试,理论设计占一定分值,各部分分数(包括理论设计)分配为:方波占10分、正弦波占8分、窄脉冲占6分、正交的余弦波占6分;4.不允许在测评板上增加使用IC芯片,如果增加芯片则按0分记;5.原则上不允许在测评板上增加使用BJT、FET和二极管,如果增加则按3分/只扣分;6.原则上不允许参赛队更换测评板,如果损坏测评板只可更换一次并扣10分;7.各路信号测试应在电路互联且加负载情况下进行,单独模块测试相应得分减半;8.本科组只允许使用单一+5V电源,增加使用直流电源的扣除10分。
电子设计大赛无线充电电动车的设计报告

本篇论文为电子设计大赛以IAP15F2K61S2单片机为控制芯片的无线充电电动车控制系统的设计,内容和格式可以作为比赛或者课程设计论文的参考,本文为原创,仅供参考请勿抄袭。
《设计报告》摘要:本文是以IAP15F2K61S2单片机为控制芯片的无线充电电动车控制系统的设计,整个系统包含CPU模块、无线发射器模块、无线接收器模块、电机驱动模块、电源等模块,并运用超级电容作为储能原件进行设计。
本系统采用ATMEL公司的51系列单片机和TI公司TPS63020芯片、LM2596稳压芯片等元件完成无线充电电动车的控制设计要求。
TI公司的TPS63020芯片来进行DC-DC变换可以有效的进行直流电源的电压转换。
关键字:IAP15F2K61S2单片机、无线充电、TPS63020、超级电容。
1.方案选择与论证 (3)1.1主控制器方案与选择 (3)1.2电动车部分稳压模块的方案与选择 (3)2.理论分析与计算系统相关参数设计 (3)2.1无线充电装置分析与计算 (3)3.电路与程序设计 (5)3.1电路设计 (5)4.测试方案与测试结果 (6)4.1方案与结果 (6)4.2测试结果分析: (7)5.总结 (7)6.参考文献 (8)1.方案选择与论证1.1主控制器方案与选择方案一:采用可编程逻辑器件CPLD 作为控制器。
CPLD 可以实现各种复杂的逻辑功能,易于进行功能扩展。
采用并行的输入输出方式,提高了系统的处理速度,适合作为大规模实时系统的控制核心。
方案二:采用IAP15F2K61S2单片机进行控制。
IAP15F2K61S2结构简单,接线方便,片内大容量2048字节的SRAM ,运行快速、稳定,可在电磁干扰情况下工作。
IAP15F2K61S2单片机编程方便,还可以在线编程、下载、调试。
综合考虑:选择方案二。
IAP15F2K61S2单片机编程更方便合适。
1.2电动车部分稳压模块的方案与选择方案一:采用XL4061E1稳压模块。
电子设计大赛运动小车追踪系统运作设计方案
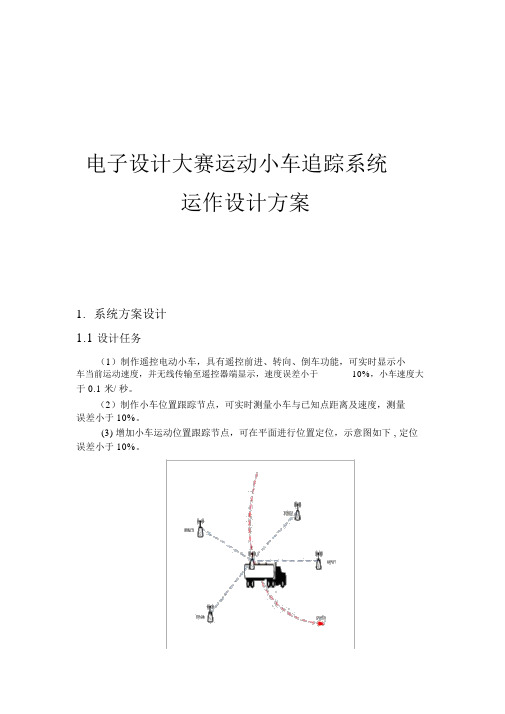
电子设计大赛运动小车追踪系统运作设计方案1.系统方案设计1.1 设计任务(1)制作遥控电动小车,具有遥控前进、转向、倒车功能,可实时显示小车当前运动速度,并无线传输至遥控器端显示,速度误差小于10%,小车速度大于 0.1 米/ 秒。
(2)制作小车位置跟踪节点,可实时测量小车与已知点距离及速度,测量误差小于 10%。
(3) 增加小车运动位置跟踪节点,可在平面进行位置定位,示意图如下 , 定位误差小于 10%。
(4)将各小车位置跟踪节点数据传输至遥控器并进行实时位置显示。
2.方案论证与选择2.1单片机的选定方案一:采用型号为AT89C52 的单片机作为主控制器,使用霍尔传感器进行测量的直流电机转速测量系统。
AT89C52 是带 4K 字节闪烁可编程擦除只读存储器的低电压、高性能 CMOS8位微处理器。
它将多功能 8 位 CPU和闪烁存储器组合在单个芯片中,为许多控制提供了灵活性高且价格低廉的方案[3] 。
方案二:采用单片机 C8051F060 作为主控制器,使用霍尔传感器进行测量的直流电机转速测量系统。
C8051F060 系列单片机是美国 CYGNAL 公司推出的一种与 51 系列单片机核兼容的单片机[4]。
C8051F060 作为新一代 8051 单片机,具有功能强大、体积小、工作稳定等特点,适用于复杂控制系统。
因此选择方案一。
AT89C52是美国 ATMEL公司生产的低电压,高性能 CMOS8位单片机。
片含8kbytes 的可反复擦写的只读程序存储器( PEROM)和 256bytes 的随机存储数据存储器( ROM),器件采用 ATMEL公司的高密度,非易失性存储技术生产,与标准MCS-51指令系统及 8052 产品引脚兼容,片置通用 8 位中央处理器(CPU)和 Flash 存储单元,功能强大的 AT89C52单片机适合于许多较为复杂的控制应用场合。
3.系统功能模块的划分按照设计要求,系统可以分为以下几个基本功能模块:电源模块、红外发射模块、键盘模块、红外接收模块、电机驱动模块以及辅助模块,超声波定位模块等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
参赛注意事项
(1)8月7日8:00竞赛正式开始。
本科组参赛队只能在【本科组】题目中任选一题;高职高专组参赛队在【高职高专组】题目中任选一题,也可以选择【本科组】题目。
(2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。
(3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生身份的有效证件(如学生证)随时备查。
(4)每队严格限制3人,开赛后不得中途更换队员。
(5)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设计制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违纪参赛队取消评审资格。
(6)8月10日20:00竞赛结束,上交设计报告、制作实物及《登记表》,由专人封存。
电动小车动态无线充电系统(A题)
【本科组】
一、任务
设计并制作一个无线充电电动小车及无线充电系统,电动小车可采用成品车改制,全车重量不小于250 g,外形尺寸不大于30cm×26cm,圆形无线充电装置发射线圈外径不大于20cm。
无线充电装置的接收线圈安装在小车底盘上,仅采用超级电容(法拉电容)作为小车储能、充电元件。
如图1所示,在平板上布置直径为70cm的黑色圆形行驶引导线(线宽≤2cm),均匀分布在圆形引导线上的A、B、C、D点(直径为4cm的黑色圆点)上分别安装无线充电装置的发射线
圈。
无线充电系统由1台5V的直流稳压电源供电,输出电流不大于1A。
图1 电动小车行驶区域示意图
二、要求
1. 基本要求
(1)小车能通过声或光显示是否处在充电状态。
(2)小车放置在A点,接通电源充电,60秒时断开电源,小车检测到发射线圈停止工作自行起动,沿引导线行驶至B点并自动停车。
(3)小车放置在A点,接通电源充电,60秒时断开电源,小车检测到发射线圈停止工作自行起动,沿引导线行驶直至停车(行驶期间,4个发射线
圈均不工作),测量小车行驶距离L1,L1越大越好。
2. 发挥部分
(1)小车放置在A点,接通电源充电并开始计时;60秒时,小车自行起动(小车超过60秒起动按超时时间扣分),沿引导线单向不停顿行驶直至
停车(沿途由4个发射线圈轮流动态充电);180秒时,如小车仍在行驶,
则断开电源,直至停车。
测量小车行驶距离L2,计算L=L2-L1,L越大越
好。
(2)在发挥部分(1)测试中,测量直流稳压电源在小车开始充电到停驶时间段内输出的电能W,计算K= L2/W,K越大越好。
(3)其他。
三、说明
(1)本题所有控制器必须使用TI公司处理器。
(2)小车行驶区域可采用表面平整的三夹板等自行搭建,4 个发射线圈可放置在板背面,发射线圈的圆心应分别与A、B、C、D圆点的圆心同心。
(3)作品采用的处理器、小车全车重量、外形尺寸、发射线圈最大外形尺寸及安装位置不满足题目要求的作品不予测试。
(4)每次测试前,要求对小车的储能元件进行完全放电,从而确保测试时小车无预先额外储能。
(5)题中距离L的单位为cm,电能W的单位为Wh。
(6)测试小车行驶距离时,统一以与引导线相交的小车最后端为测量点。
(7)基本要求(2)测试中,小车停车后,其投影任一点与B点相交即认为到达B点。
(8)在测试小车行驶距离时,如小车偏离引导线(即小车投影不与引导线相交),则以该驶离点为该行驶距离的结束测试点。
四、评分标准。