汽车车灯控制系统设计
汽车照明灯光控制系统设计解析

汽车照明灯光控制系统设计解析
一、模块直接控制灯光系统
模块直接控制灯光系统是指由控制模块直接控制灯光的工作。
老款的车辆是将相关的继电器做到了模块的内部进行控制,这种与继电器控制式区别不大,所以这里不再叙述。
另外一种是通过模块内部的场效应管直接输出进行控制。
1.功能特点
由模块通过内部的场效应管(FET)进行直接控制具有如下优点:
①监控:可以监测灯泡的工作是否正常;
②功率限制:如果车辆的电压大于设定值,则可对灯泡的亮度进行控制,提高灯泡的寿命;
③防止光强变化:当发动机的转速突然增加,可能会导致系统电压升高,灯泡光强变大;大功率用电设备的工作可能会导致系统电压下降,灯泡光强变小;采用模块控制则可以避免上述的两种现象。
(1)日间行车灯
日间行车灯是指使车辆在白天行驶时更容易被识别的灯具,装在车身前部。
日间行车灯不是照明灯,不是为了使驾驶员能看清路面,而是为了告知其他车辆或行人有一辆车开过来了,属于信号灯的范畴。
如下图所示,一般的日间行车灯,采用了更高亮度的LED灯组,能大幅降低达35%的电力,可增加电瓶的寿命,且LED的最长寿命更是达到80000h-100000h,几乎等同于车辆的使用年限。
日间行车灯
(2)自动大灯控制系统
自动大灯也叫自动感应式大灯,相当于为前大灯安装了感光控制系统,控制模块根据光线传感器来判断光线亮度变化,从而控制大灯的自动点亮或熄灭。
例如从亮的地方突然进入隧道,大灯自动调节灯光亮度,点亮前路。
基于CAN总线的轿车车灯控制系统及雷达系统的设计毕业设计 推荐
基于CAN总线的轿车车灯控制系统及雷达系统的设计随着现代汽车技术的日益发展,汽车电子装置不断增加,汽车综合控制系统中需实时交换的各种控制信息随之越来越多,传统线束技术已远远不能满足这种需求,汽车总线控制技术应运而生。
本设计主要实现车灯控制系统和雷达系统的智能化。
本设计以单片机P87C591为核心构建硬件平台,通过CAN总线模块接收和发送报文、光敏传感器采集光信号和湿度传感器采集湿度信号,传感器采集的信号输入给AD转换器,再传输给单片机,由单片机对信号进行分析处理,输出控制信号控制汽车车灯的亮灭,雷达系统通过超声波的发送和接收模块,把信号传给A/D转换器,在由单片机对信号进行分析处理,控制报警电路报警。
在软件设计上,有CAN总线收发系统,灯光系统,雷达系统和测距系统等。
本系统实现了汽车车灯控制的智能化和雷达系统的测距功能,再有障碍物靠近车辆时,报警电路能够及时报警,保证了汽车在行驶过程中的汽车的安全行驶,大大提高了车辆在行驶中的安全性和可靠性。
关键词:CAN总线,P87C591,车灯控制,雷达系统With the development of modern automobile, automobile electronic device increases ceaselessly, all sorts of information control will be more and more real-time exchange need comprehensive automobile control system, the traditional wiring technology has far can not meet this demand, vehicle bus control technology emerge as the times require. This design is mainly the realization of intelligent lighting control systems and radar systems.The P87C591 single-chip design as the core of the hardware platform, receiving and sending newspaper, a photosensitive sensor signal collection and humidity sensor and humidity signal through the CAN bus module, signal sensor inputs to the AD converter, and then transmitted to the microcontroller, the signal was processed by SCM, the output control signals to control the vehicle lamp light out, radar system by ultrasonic sending and receiving module, sending a signal to the A/D converter, by the microcontroller on the signal analysis and processing, control alarm circuit alarm. In software design, CAN bus transceiver system, lighting system, radar system and ranging system.This system has realized the ranging function of intelligent and radar system of automobile light control, another obstacle to the vehicle, the alarm circuit can alarm in time, ensure the safety of vehicles in the automobile driving process, greatly improving the safety and reliability of the vehicle.Keywords:CAN Bus;P87C591l;Lights Control l;Radar System目录第1章绪论 (1)1.1 国内外研究现状及CAN总线技术特点 (1)1.2 课题研究的背景 (2)1.2.1 汽车车身电子技术 (2)1.2.2 现场总线的意义 (2)1.2.3 车灯控制系统及雷达系统利用CAN总线的意义 (2)1.3 毕业设计总体内容 (3)第2章方案设计 (4)2.1 方案比较 (4)2.2 总体方案 (13)第3章硬件设计 (15)3.1 单片机的最小系统 (15)3.2 灯光控制节点MCU (16)3.3 灯光驱动电路 (17)3.4 超声发射电路 (17)3.5 超声波接收模块设计 (18)3.6 显示电路 (21)3.7 报警电路 (21)3.8 串行通讯接口设计 (22)3.9 单片机的拓展电路 (23)3.10 光敏传感模块 (24)3.11 湿度传感器模块 (25)3.12 稳压电路 (26)第4章软件设计 (27)4.1 系统总体软件功能 (27)4.2 J1939通讯协议 (27)4.3 灯光系统的流程图 (28)4.4 节点接收模块 (30)4.5 节点发送模块 (31)4.6 照明灯软件设计 (33)4.7 雾灯软件设计 (34)4.8 测距系统 (35)第5章结论 (37)致谢 (38)参考文献 (39)附录I.................................................................................... 错误!未定义书签。
汽车车灯智能控制系统的设计

一、汽车电子概述汽车是现代化高速发展社会中人们普遍使用的交通工具,也是技术密集和资本密集的工业产品。
世界上近乎所有的经济强国都是以汽车产业作为国民经济支柱产业的。
几乎所有的现代化科学技术都能在汽车技术中体现出来,当今世界上汽车技术是衡量一个国家的科技水平的主要标志。
从汽车技术的发展现状看,汽车电子技术是现代汽车发展的主要技术之一。
现代的汽车电子技术不再是简单地对汽车中某些机械零部件进行电子控制,而是根据汽车实际使用条件多变的需要,对汽车整体性能进行优化综合控制。
另外,汽车中各种功能的不断完善,使汽车电子控制单元越来越多,控制装置的数量和复杂性也不断增加,庞大的线束不但会占去大量的车内空间、增加系统成本,同时也降低了系统的可靠性和可维护性。
传统的控制方案和布线方法已不能适应汽车技术发展的需要,繁琐的现场连线正在被单一简洁的现场总线网络所代替。
因此,汽车电子技术已经从单部件电子化转向为集成电子化、模块化,整车智能化、模块化的总线式控制器网络技术是汽车电子技术发展的新方向。
随着现场总线技术的不断发展和其内容的不断丰富,以及各种控制、应用功能与功能块、控制网络的网络管理、系统管理等内容的不断扩充,现场总线已经超出了原有的定位范围,不再只是通信标准和通信技术,而成为网络系统和控制系统。
CA N总线作为现场总线的重要成员,其本身就是作为一种汽车车内串行数据通信总线而提出的,现今CAN总线己经广泛的应用在国外汽车上。
汽车电子共分为发动机电子、底盘电子、车身电子、信息通信与娱乐系统四大类。
二、汽车网络与控制器的现状汽车网络和控制器是汽车的神经和大脑,它需要频繁的接收和发送数据,对汽车进行实时检测和控制。
控制器通过对执行机构控制系统发出控制指令,控制汽车运行状态。
传统的汽车电气系统大多采用点对点的单一通信方式,相互之间很少有联系,这样必然造成整车信号和控制系统的庞大,造成汽车电路系统的复杂及生产成本的增加。
一般的汽车控制器,采用查询方式发送信息,采用中断方式接收信息,管理和共享车辆的运行数据,执行驾驶员发出的各种命令。
用S7-200的红绿灯优秀设计

用S7-200 构成交通灯控制系统。
(1)控制要求:如图7-4所示,起动后,南北红灯亮并维持25s。
在南北红灯亮的同时,东西绿灯也亮,1s后,东西车灯即甲亮。
到20s时,东西绿灯闪亮,3s后熄灭,在东西绿灯熄灭后东西黄灯亮,同时甲灭。
黄灯亮2s后灭东西红灯亮。
与此同时,南北红灯灭,南图7-4 交通灯控制示意图(2)分配输入输出起动按钮:I0.0 南北红灯:Q0.0 东西红灯:Q0.3南北黄灯:Q0.1 东西黄灯:Q0.4南北绿灯:Q0.2 东西绿灯:Q0.5南北车灯:Q0.6 东西车灯:Q0.7 (3)程序设计根据控制要求首先画出十字路口交通信号灯的时序图,如图7-5所示。
起动I0.0东西绿灯Q0.5东西车灯甲Q0.7东西黄灯Q0.4东西红灯Q0.3南北绿灯Q0.2南北车灯乙Q0.6南北黄灯Q0.1南北红灯Q0.0根据十字路口交通信号灯的时序图,用基本逻辑指令设计的信号灯控制的梯形图如图7-6所示。
分析如下:首先,找出南北方向和东西方向灯的关系:南北红灯亮(灭)的时间=东西红灯灭(亮)的时间,南北红灯亮25S(T37计时)后,东西红灯亮30S(T41计时)后。
其次,找出东西方向的灯的关系:东西红灯亮30S后灭(T41复位)→东西绿灯平光亮20S(T43计时)后→东西绿灯闪光3S(T44计时)后,绿灯灭→东西黄灯亮2S(T42计时)。
再其次,找出南北向灯的关系:南北红灯亮25S(T37计时)后灭→南北绿灯平光25S (T38计时)后→南北绿灯闪光3S(T39计时)后,绿灯灭→南北黄灯亮2S(T40计时)。
最后找出车灯的时序关系:东西车灯是在南北红灯亮后开始延时(T49计时)1S后,东西车灯亮,直至东西绿灯闪光灭(T44延时到);南北车灯是在东西红灯亮后开始延时(T50计时)1S后,南北车灯亮,直至南北绿灯闪光灭(T39延时到)。
根据上述分析列出各灯的输出控制表达式:东西红灯:Q0.337 南北红灯Q0.00.0·T37东西绿灯:Q0.50.0·T4343·T44·T59 南北绿灯Q0.20.3·T3838·T39·T59东西黄灯:Q0.444·T42 南北黄灯Q0.139·T40东西车灯:Q0.749·T44 南北车灯Q0.650·T39。
自适应前照灯车灯模糊控制系统设计
结 合 的系 统 建 立 方 法。 。 第二阶段大约从 l7— 17 9 4 9 9年, 这是产生简单模糊控制
器韵阶段。在这期间,美国加州一个公司率先生产 了第一只 模糊逻辑芯片。l8 年丹麦 的斯密司公司首次应用芯片在水 90
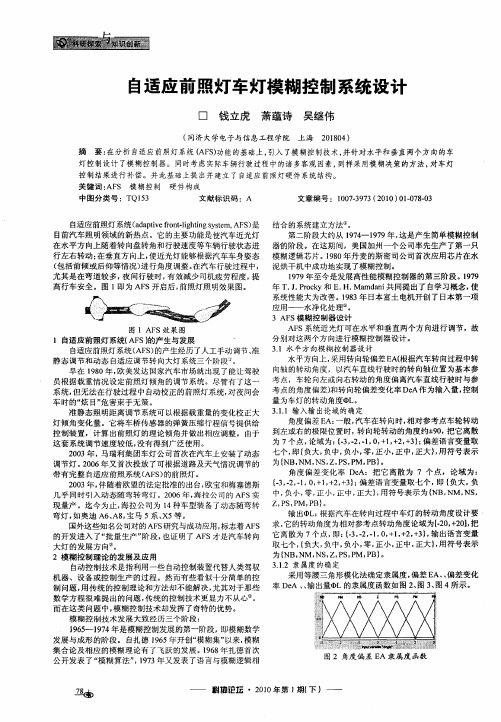
泥 烘 干 机 中成 功 地 实现 了模 糊 控 制 。 17 9 9年至今是发展高性 能模糊控制器 的第三阶段 。 9 9 17 年 T.. rcy和 E. Ma a i J Pok H. mdn 共同提 出了 自学 习概念 , 使 系 统 性 能 大 为 改 善 。18 93年 日本 富土 电机 开 创 了 日本 第 一 项 应 用 — — 水 净 化 处 理0 。 3 AF S模 糊 控 制器 设 计 A S系 统近 光灯 可 在 水 平 和 垂 直 两 个 方 向进 行 调 节 ,故 F 分 别 对 这 两 个 方 向进 行 模 糊 控 制 器 设 计 。 31水 平 方 向模 糊 控 制 器设 计 . 水平方向上 , 采用转 向轮偏差 E 根据汽车转向过程 中转 A( 向轴 的转动角度,以汽 车直线行驶时 的转 向轴位置为基本参 考 点 ,车 轮 向左 或 向右 转 动 的角 度 偏 离 汽 车 直 线 行 驶 时 与 参 考 点 的 角 度 偏 差) 转 向轮 偏 差 变 化 率 De 为 输 入 量 , 制 和 A作 控 量 为 车 灯 的 转 动 角度 L 。 31 .. 1输入输出论域 的确定 角度偏差 E 一般 , A: 汽车在转 向时, 相对参考点车轮转动 到 左 或 右 的 极 限位 置 时 , 向轮 转 动 的 角度 约 ̄ 0 把 它 离 散 转 9, 为7 个点 , 论域为: ., ,1 0 + , 2+ } 偏差语言变量取 { - -, , l+ , 3 ; 3 2 七个 , { 大, 即 负 负中 , 小 , , 小 , 中 , 大 } 用 符 号 表 示 负 零 正 正 正 , 为 { N , , , S P ,B} NB, M NS Z P , M P 。 角 度 偏 差 变 化 率 D A:把 它 离 散 为 7 个 点 ,论 域 为 : e { , ,1 0+ , 2+ ) 偏差语言变量取七个 , { . . ., , 1+ , 3 : 3 2 即 负大, 负 中 , 小 , , 小 , 中 , 大 )用 符 号 表 示 为 { NM , , 负 零 正 正 正 , NB, NS z,S P P 。 P , M, B} 输 出O : L 根据 汽车在转 向过程 中车灯的转动角度设计要 求, 它的转动角度为相对参考 点转动角度论域为【 0 + 0 , - , 2 】把 2 它 离 散 为 7个 点 , :. , ,1 0 + , 2 + ) 输 出语 言 变 量 即 { . ., , l+ , 3 , 3 2 取 七 个 ,负 大 , 中 , 小 , , 小 , 中 , { 负 负 零 正 正 正大 }用 符 号 表 示 , 为 { NM , , P ,M , B 。 NB, NS Z,S P P ) 31 隶 属 度 的 确 定 .. 2 采用等腰三角形模化法确 定隶属度 , 偏差 E 、 A、偏差变化 率 D A 、 输 出量 的 隶属 度 函数 如 图 2 图 3 图 4所 示 。 e 、 L 、 、
基于STC90C516RD+单片机的汽车车灯控制系统设计

c i r c u i t wa s g i v e n;i n t h e e n d,t h e s o f t wa r e d e s i g n i d e a s a n d r e a l i z a t i o n me t h o d w e r e d e t a i l e d,t h e s y s t e m c o n t r o l f u n c t i o n wa s
( 1 . S c h o o l o f T r a n s p o r t a t i o n a n d A u t o m o t i v e E n g i n e e r i n g , P a n z h i h u a U n i v e r s i t y , P a n z h i h u a C i t y , S i c h u a n P r o v i n c e 6 1 7 0 0 0 , C h i n a ; 2 . C h o n g q i n g L i a n s h e n g C o m p a n y o f Ma n a g e m e n t , C h o n g q i n g 4 0 0 0 0 0 , C h i n a )
De s i g n o f Ve h i c l e Li g h t Co n t r o l S y s t e m Ba s e d o n S TC9 0 C5 1 6 RD+
Wa n g De n g g u i ,Z e n g J i a n
d o i : 1 0 . 3 9 6 9 / j . i s s n . 1 6 7 3 — 3 1 4 2 . 2 0 1 3 . 0 1 . 0 0 5
基于CAN总线的电动汽车车灯控制系统设计

g n rt st ei p t i n l t emir c n r l rs n sCA me s g sa c r i g t es t h s t st r u h t e C e e ae n u g a , c o o t l e d N s a e c o d n t wi t u h o g AN h s h oe oh c a h b smo u e L g tc nr l d l hp r c ie h o t l a k t va C d l n o t l e c re p n ig u d l . ih o t o mo u e c i e ev st e c n r c e s i AN mo ue a d c n r st o rs o d n op o h l hs t o k a c r i g t a k t o f r t n T e s se c mp n n sa d t e o ealp o rm ,h e e t n o i t o w r c o dn o p c es fi o mai . h y tm o o e t n h v rl r g a t e s lc i f g n o o man c mp n n s ae d s r e f c sn n t e h r wae c n e t n s h me a d t e o t l e in i r p s d i o o e t r e c i d,o u i g o h a d r o n c i c e , n p i sg sp o o e . b o h ma d S f a e i e in d i d l , i ie n o tr e mo ue ,h n t iain mo u e s n i g mo u e r c ii g o t r sd s e n mo u e d vd d it h e d ls t e ii a z t d l , e dn d l , e evn w g i l o
基于单片机的汽车车灯控制器的设计
基于单片机的汽车车灯控制器的设计近年来,车灯控制器逐渐成为汽车电子控制系统中不可或缺的组成部分。
由于单片机的性能优良、易于编程,因此基于单片机的汽车车灯控制器在汽车行业中得到了广泛的应用。
为了更好地了解基于单片机的汽车车灯控制器的设计,本文将对其进行详细讲解。
首先,需要明确的是,车灯控制器的设计基本上是由两个部分组成的,即硬件设计和软件设计。
在硬件设计方面,需要使用单片机负责控制汽车的灯光,因此需要考虑单片机的硬件连接和外设的接口。
在软件设计方面,主要包括编程和算法设计两个方面。
针对硬件设计,单片机应选择性能优良、价格合适的芯片,这样可以在有限的资源下取得最优秀的性价比。
同时,需要考虑到单片机外设的连接接口,比如模拟输入输出口、数字输入输出口、计时计数器、串行通讯接口等,以便更好地控制汽车的灯光。
接着,就是软件设计的部分。
在软件设计中,需要使用微处理器的编程语言以及对算法的掌握。
对于单片机的编程语言,一般使用的是C语言。
同时,还需要编写针对不同车灯状态的控制算法,以便更好地控制汽车的交通安全。
最终的目的是要实现对车灯状态的时时刻刻监控和控制。
所以,基于单片机的汽车车灯控制器的设计需要耐心和技术,而设计的过程中还需要注意以下几点:1. 应根据实际需要选择合适的计算器。
2. 对于电路的接线方法和分析要仔细,避免出现故障。
3. 需要将编程的代码经过正确的测试和验证,确保网站的正常运作。
总之,设计基于单片机的汽车车灯控制器是一项非常重要的任务。
通过合理、准确的硬件连接和精确的软件设计,可以实现对车灯状态的精确控制,保证交通安全。
相信在不久的将来,基于单片机的汽车车灯控制器将在汽车行业中发挥更加重要的作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
汽车车灯控制系统设计
发表时间:2019-06-13T09:04:50.930Z 来源:《电力设备》2019年第1期作者:邴琰
[导读] 摘要:汽车车灯关系着汽车行驶的安全,本文基于笔者的研究实践,从系统框架、硬件电路和软件控制系统三个方面着手,设计了一种基于集成电路和单片机的车灯控制系统。
(湖北工业大学 430068)
摘要:汽车车灯关系着汽车行驶的安全,本文基于笔者的研究实践,从系统框架、硬件电路和软件控制系统三个方面着手,设计了一种基于集成电路和单片机的车灯控制系统。
关键词:车等系统;单片机;集成电路
一、汽车车灯系统
汽车车灯是汽车的重要构成装置,并且随着汽车行业的不断发展,汽车车灯的种类和类型也越发多样,使得汽车车灯的控制系统也相应的复杂起来。
同时随着我国关于“中国制造2025”口号的提出,我国对于汽车行业自主研发领域投入的资源也将随之增加,这也将为整个市场注入新的活力。
车灯对于车辆安全行驶十分重要,针对汽车车灯控制系统进行优化设计,无异于提高车辆行驶的安全系数和提高车灯安装维护的效率。
本文正是基于这种理念,应用数字逻辑系统和相关硬件电路来代替传统的机械控制系统,帮助汽车车灯控制系统实现自动化和智能化,减少因车灯问题而造成的车辆安全事故。
二、汽车车灯控制系统设计
1.系统框架设计
本次汽车车灯控制系统设计的重点是能够根据驾驶员行车过程的需求来快速调整汽车车灯的工作状态,主要通过集成电路和相关软件来进行实现。
要实现这类的功能,就需要构建一个汽车车灯控制系统的完整框架。
本系统以国家相关规章为基础,以安全和高效为导向,大致的部分分为硬件设施基础和软件控制系统两个方面,硬件设施基础包括了硬件电路和汽车车灯系统,软件控制系统由一片MS-51型单片机作为控制器的主体,同时连接其他的MS-51型单片机所构成的节点控制盒。
使用这种总线控制系统,就能够大幅度减少系统的复杂程度,从而降低了系统故障的概率。
2.硬件电路设计
硬挺的硬件电路应该包括时钟电路、电源电路、复位电路和逻辑开关四个部分,主要控制车灯闪烁的就是时钟电路和逻辑开关电路。
首先是系统的时钟电路,按照通用的闪烁频率标准,汽车车灯系统的闪烁频率应为每分钟50~110次,所以需要将时钟电路设计为产生固定频率方波脉冲的多谐振荡器,应用555定时器来实现频率为1HZ的低频闪光,同时为了防止方波脉冲的占空比变化,还需要设计占空比可调功能来随时进行调整。
其次是逻辑开关电路,逻辑开关电路主要依托于节点控制盒进行控制,利用该节点的拨码开关和组合逻辑电路来实现车灯系统不同状态的控制。
控制节点应该分为前车灯结点和后车灯结点两个部分,主要负责控制车灯的左右转向控制和显示、前远灯控制和显示、前近灯控制和显示、后大灯控制和显示、紧急灯控制和显示以及刹车控制和显示。
两个部分和主要控制系统都采用12MHz晶振片,串行口工作方式2。
3.软件控制系统设计
本次车灯控制系统的软件主要由主程序、延时子程序和键盘扫描子程序等模块组成,语言为C51,单片机采用12 MHz晶振片,大致分为主控制器和节点控制器两个系统。
(1)主控制器
主控制器和节点控制器之间的通信为应答方式,主控制器在开机时主处理器初始化,使处理器工作在多机通信方式即串行口工作方式2。
主处理器监视控制输入信号,当有信号输入时,对信号进行处理,将命令指令送各支点处理器。
在主处理器发送命令指令至各支点处理器前,主处理器会先发送问询信号,询问节点处理器是否准备就绪。
问询信息帖:发送节点地址,节点应答。
如果一切正常,则发送命令指令至支点处理器;若未准备就绪,则继续问询;若长时间无法通信,则发出警报,显示故障,需要进行检测、维护。
节点在收到主处理器发送过来的地址信息,判断是否是发送给本节点的问询信号,如果是,则向主处理器发送准备就绪信号。
信号贴格式以从机地址做信息验证码。
(2)节点控制器
节点控制器在开机时的开机节点处理器初始化,可以使处理器工作在多机通信方式即串行口工作方式2,确定通信速率等,PCON=80H、SCON=B0H。
初始化输出,检测本节点工作状态是否正常,正常则开始监视接收,不正常发送错误信息。
监视接收地址信息,接收到指令后,判断指令送达地址,若为本节点地址,打开指令接收口,SETBRI,则准备接收命令、指令信息,并向主处理器单片机发送准备就绪信息。
监视接收指令信息标志为RI,接收到指令信息,发送收到指令信息给主处理器,分析、处理指令,向开关发送信号,使相应的车灯开通或关闭。
三、总结
总而言之,对汽车车灯的控制系统进行设计上的优化和改进,能够大大提高汽车车灯控制系统的工作效率。
一方面,随着控制系统的优化,越来越多的司机能够避免交通事故的发生,如何减少交通事故正是每一个从业人员都面临的问题;另一方面,对汽车车灯控制系统进行自主探究和研发,代表着我国汽车行业自主研发领域取得了长足的进步,也代表着我国汽车领域的正在坚实而稳定的向前迈进。
参考文献:
[1]徐涛,史增勇,熊国民.基于CAN总线的双模块汽车车灯控制系统设计[J].河南科技学院学报(自然科学版),2013,41(01):67-72.
[2]王登贵,曾建.基于STC90C516RD+单片机的汽车车灯控制系统设计[J].农业装备与车辆工程,2013,51(01):16-18.。