多传感器融合技术在机器人定位与导航中的应用研究
《基于多传感器融合的移动机器人定位系统研究》
《基于多传感器融合的移动机器人定位系统研究》一、引言随着科技的发展,移动机器人技术在工业、医疗、服务等多个领域得到广泛应用。
准确的定位技术是实现移动机器人自主导航、完成任务的关键。
传统单一的传感器在复杂环境下难以实现精准定位,因此,基于多传感器融合的移动机器人定位系统成为当前研究的热点。
本文将深入探讨基于多传感器融合的移动机器人定位系统的研究与应用。
二、多传感器融合技术概述多传感器融合技术是将多种传感器的数据通过一定的算法进行融合,以获得更加准确、全面的信息。
在移动机器人定位系统中,常见的传感器包括激光雷达、摄像头、惯性测量单元(IMU)、轮速传感器等。
这些传感器在不同的环境中具有不同的优势和局限性,通过多传感器融合技术可以互相弥补,提高定位的准确性和鲁棒性。
三、多传感器融合定位系统的组成与原理(一)系统组成多传感器融合定位系统主要由传感器模块、数据处理模块和定位算法模块组成。
传感器模块包括激光雷达、摄像头、IMU等,用于获取环境信息和机器人自身的运动信息。
数据处理模块负责对传感器数据进行预处理和特征提取。
定位算法模块则根据融合后的数据,采用合适的算法进行定位。
(二)工作原理多传感器融合定位系统的工作原理是:首先,各种传感器获取环境信息和机器人自身的运动信息。
然后,数据处理模块对传感器数据进行预处理和特征提取,包括去除噪声、校正畸变等。
接着,定位算法模块采用合适的算法对融合后的数据进行处理,得到机器人的位置和姿态信息。
最后,将定位结果输出给移动机器人的控制系统,实现自主导航。
四、多传感器融合技术在移动机器人定位中的应用(一)激光雷达与摄像头的融合激光雷达和摄像头是移动机器人定位中常用的两种传感器。
激光雷达可以获取环境的三维信息,具有较高的测量精度和距离分辨率;而摄像头则可以获取环境的颜色、纹理等视觉信息。
通过将激光雷达和摄像头的数据进行融合,可以实现更加准确的物体识别和障碍物检测,提高机器人的定位精度和鲁棒性。
基于多传感器融合SLAM应用的室内机器人研究分析

基于多传感器融合SLAM应用的室内机器人研究分析室内机器人研究在近年来得到了广泛关注,其中基于多传感器融合的SLAM (Simultaneous Localization and Mapping)技术是室内机器人导航和环境建模的关键技术之一。
本文将对基于多传感器融合SLAM应用的室内机器人研究进行分析,并讨论其在实际应用中的挑战和前景。
室内机器人需要具备自主导航能力,即在未知环境中可自主定位和构建环境模型。
多传感器融合SLAM技术可以利用机器人上搭载的多种传感器,如激光雷达、摄像头、惯性测量单元等,融合各种传感器的数据来实现实时的自主定位和环境建模。
传感器数据的融合可以弥补每种传感器单独使用时的局限性,提高定位和建模的精度和稳定性。
基于多传感器融合SLAM应用的室内机器人仍然面临一些挑战。
首先是传感器数据的标定和校准问题,不同传感器之间存在误差,需要通过标定和校准来减小误差,提高数据融合的效果。
室内环境的复杂性和动态性也是一个挑战,例如在人流密集的场景中,机器人需要能够准确辨别人体和其他物体,并实时更新环境模型。
多传感器数据融合的算法设计和实现也是一个研究难点,需要考虑传感器数据的融合权重和融合算法的实时性和鲁棒性。
尽管面临一些挑战,基于多传感器融合SLAM应用的室内机器人在实际应用中仍具有广阔的前景。
它可以应用于室内导航机器人,帮助人们在室内环境中进行定位和导航。
它也可以应用于室内安防机器人,通过融合摄像头和红外传感器的数据,实现对室内环境的监控和异常检测。
它还可以应用于智能家居机器人,通过融合各种传感器的数据,实现对室内环境的感知和控制,提高家居的智能化水平。
基于多传感器融合SLAM应用的室内机器人研究是一个具有重要意义和广阔前景的研究领域。
尽管面临一些挑战,但随着传感器技术和算法的不断进步,相信在不久的将来,基于多传感器融合SLAM的室内机器人将在各个领域得到更广泛的应用和推广。
移动机器人论文:基于多传感器信息融合的移动机器人导航定位技术研究

移动机器人论文:基于多传感器信息融合的移动机器人导航定位技术研究【中文摘要】导航定位技术作为移动机器人关键技术之一,是十分热门的研究课题。
特别是未知环境中移动机器人导航定位已经成为移动机器人研究的一个新方向。
移动机器人导航定位需要通过传感器来检测环境的信息,采用单传感器存在很大的局限性,采用多传感器来实现移动机器人定位是必然的。
多传感器信息融合为移动机器人在各种复杂、动态、不确定或未知的环境中工作提供了一种有效的技术解决途径。
本论文以多传感器信息融合技术作为研究重点,结合移动机器人导航定位理论和实践进行探讨,提出了以各种导航定位传感器组合为融合单元,以联合卡尔曼滤波器为融合结构的移动机器人导航定位方法。
论文首先介绍了国内外移动机器人的发展状况、移动机器人的导航定位技术以及多传感器信息融合技术在移动机器人中的应用。
然后详细分析了移动机器人导航定位的基本原理和常用的导航定位方法,并提出了移动机器人导航定位系统的一种新方法。
论文对移动机器人导航定位的传感器和传感器系统进行了分析,重点研究了移动机器人导航定位传感器的信息融合方法,以联合卡尔曼滤波作为融合算法基础,设计了包括惯性导航系统、全球定位系统、里程计、电子罗盘和地图匹配系统在内的多传感器信息融合算法。
论文最后设计制作了一个简化移动机器人系统,在“多传感器数据采集平台”上,进行了移动机器人多传感器信息融合实验和分析,验证了本文提出的技术方法和算法的有效性,可供移动机器人实际研制参考。
【英文摘要】The navigation and localization technology of mobile robot is one of the key technologys, and becoming more and more important. Mobile robot navigation and localization technology in the unknown environment is an emerging robot research direction. The Mobile robot localization needs sensors to detect environmental information, single sensor has limitation and the multiple sensors are needed for robot localization. The integration of multiple sensors provides an effective technical solution for robots’ working in the complex, dynamic, uncertain or unknown environment.The multiple sensors information fusion technology is described in this thesis. The theory and practice of mobile robot localization are combined in the discussion. An information fusion method is proposed for multiple sensors, which fusion unit is the combinations of navigation and localization sensors, and fusion structure is the federated Kalman filter.Firstly, the development and key technology of mobile robot in China and abroad are introduced. The navigation and localization technology and the applications of the multiple sensors information fusion in mobile robot are approached. A new method is also proposed for the mobile robot navigation andlocalization system.The sensor and the sensor system areanalyzed for the mobile robot navigation and localization. The method of data focuses is mainly studied for the mobile robot navigation and localization. A multi data fusion algorithm is designed based on the federated Kalman filter. The multiple sensors system is consisted by inertial navigation system, GPS, odometer, electronic compass and map matching system.Finally,a simplified mobile robot system is designed and made, and the physical experiment of multiple sensors is finished based onthe “Multiple Sensors Data Acquisition Platform”, thevalidity of the algorithm.is verified by simulation andanalysis of measured data.【关键词】移动机器人导航定位多传感器信息融合联合卡尔曼滤波【英文关键词】Mobile Robot Navigation andLocalization Multiple Sensors Information Fusion Federated Kalman Filter【目录】基于多传感器信息融合的移动机器人导航定位技术研究摘要6-7Abstract7第1章绪论11-17 1.1研究背景11-12 1.1.1 移动机器人的发展11-12 1.1.2移动机器人的应用12 1.2 移动机器人导航技术12-13 1.2.1 导航概念12-13 1.2.2 导航关键技术13 1.2.3 移动机器人导航研究意义13 1.3 多传感器信息融合13-16 1.3.1 信息融合技术13-14 1.3.2 机器人技术中的信息融合14 1.3.3 多传感器信息融合的主要方法14-16 1.4 主要研究内容与论文安排16-17第2章导航定位原理与系统17-25 2.1 导航定位原理17-20 2.1.1 机器人模型假设17 2.1.2 机器人位姿表示17-18 2.1.3 机器人运动学模型18-20 2.2 导航定位方法20-22 2.2.1 定位方法分类20-21 2.2.2 常用的定位方式21-22 2.3 导航定位系统实现概述22-24 2.3.1 导航定位系统22-23 2.3.2 导航定位系统实现方法23-24 2.4 本章小结24-25第3章导航定位传感器25-40 3.1 传感器概述25-27 3.1.1 传感器定义25 3.1.2 传感器数学模型25-26 3.1.3 传感器的特性指标26 3.1.4 传感器坐标转换26-27 3.2 传感器分类27-29 3.3 常用的定位传感器29-39 3.3.1 光电编码器29-31 3.3.2 超声波测距传感器31-33 3.3.3 红外测距传感器33-35 3.3.4 电子罗盘35-36 3.3.5 角速率陀螺仪36-37 3.3.6 GPS接收机37-39 3.4 本章小结39-40第4章多传感器信息融合40-56 4.1 信息融合技术概述40-43 4.1.1 信息融合基本概念40 4.1.2 信息融合系统40-41 4.1.3 数据融合常用方法和结构41-42 4.1.4 多传感器信息融合的关键问题42-43 4.2 卡尔曼滤波器43-47 4.2.1 卡尔曼滤波器简介43 4.2.2 卡尔曼滤波器模型43-45 4.2.3 联合卡尔曼滤波器45-47 4.3 多传感器导航定位算法47-54 4.3.1 导航定位多传感器系统47-48 4.3.2 多传感器信息融合方案分析48-49 4.3.3 联合卡尔曼滤波算法设计49-51 4.3.4 子滤波器系统模型51-54 4.4 容错系统设计54-55 4.4.1 故障检测方法54 4.4.2 容错系统54-55 4.5 本章小结55-56第5章实验与结果分析56-65 5.1 移动机器人实验平台56-57 5.2 传感器实验与性能分析57-61 5.2.1 编码器57-58 5.2.2 GPS接收机58-59 5.2.3 电子罗盘59-60 5.2.4 超声波测距传感器60-61 5.2.5 红外测距传感器61 5.3 联合卡尔曼定位实验与分析61-64 5.4 本章小结64-65总结与展望65-67 1 总结65 2 展望65-67致谢67-68参考文献68-72附录1 STM32核心模块电路图72-73附录2 编码器与GPS信息融合仿真程序73-75攻读硕士学位期间发表的论文75。
论文--多传感器数据融合技术在移动机器人中的应用
智能信息处理技术论文论文题目:多传感器数据融合技术在移动机器人中的应用学院:自动化学院专业:控制理论与控制工程学号:XX:序号:多传感器数据融合技术在移动机器人中的应用摘要机器人多传感器数据融合是当今科学研究的热点问题。
综述了多传感器数据融合技术在移动机器人几个工作阶段中的应用。
指明了移动机器人领域中多传感器数据融合技术的开展趋势。
关键词移动机器人多传感器数据融合AbstractNowadays, the multi-sensor data fusion of robots is an intensive topicin scientific research. The application of multi-sensor data fusion technology in mobile robots' several sessions is described. At last, future development trends of this technology arealso presented.Key Wordmobile robot multi-sensor data fusion前言随着传感器种类的日益丰富和传感器技术的飞速开展,多传感器数据融合技术得到了越来越多的关注。
并且由于其在解决探测、跟踪和识别等问题上具有生存能力强,能够增强系统检测性能、可信度、鲁棒性和可靠性,可以提高测量数据精度,扩展系统的时间和空间覆盖X围[1]等优势,多传感器数据融合在军事、农业、工业等各个领域上的应用越来越频繁。
其中,数据融合技术在机器人研究领域的应用也正处在快速开展的阶段,特别是在移动机器人中,数据融合技术的应用就更为广泛了。
本文比拟分析了现有移动机器人上所应用的多传感器数据融合技术,并对未来移动机器人研究领域内数据融合技术的开展进展了合理的展望。
正文1 移动机器人技术简介移动机器人是一类能够通过传感器感知自身状态和周围环境,实现在复杂未知中面向目标的自主运动,并完成预定任务的机器人系统[2,3]。
移动机器人基于多传感器的地图构建和导航研究的开题报告

移动机器人基于多传感器的地图构建和导航研究的开题报告1. 研究背景移动机器人在环境感知、决策和执行等方面具有优异的性能,因此广泛应用于工业自动化、服务机器人、医疗机器人等领域。
其中,地图构建和导航是移动机器人基础研究中的重要问题。
传统的地图构建和导航方法主要依靠激光雷达和视觉传感器等单一传感器,存在数据量有限、环境复杂性受限等问题。
随着多传感器技术的发展,移动机器人可以同时利用多种传感器信息,如激光雷达、相机、惯性测量单元、GPS等,实现更为准确、鲁棒的地图构建和导航。
2. 研究内容本文主要研究基于多传感器的地图构建和导航技术,重点包括以下内容:(1)多传感器数据融合算法的设计和优化,如基于卡尔曼滤波、粒子滤波等方法,综合利用不同传感器信息获得更准确、鲁棒的机器人定位和环境感知结果。
(2)基于多传感器数据的地图构建方法,如基于视觉SLAM、激光SLAM等方法,将多传感器数据转换为地图信息,提高地图精度和建图效率。
(3)基于多传感器数据的移动机器人导航方法,如基于启发式规划、遗传算法等方法,根据目标与当前机器人位置等信息,高效地规划机器人的运动路径,并能够适应不同环境复杂性和传感器信息不确定性。
3. 研究意义本文研究的基于多传感器的地图构建和导航技术有着重要的研究意义和应用价值。
(1)为移动机器人定位和环境感知提供更为可靠、精确的解决方案,实现更高效、准确的移动机器人应用。
(2)为基于移动机器人的无人化生产、智能物流、高精度测绘等应用提供技术支持。
(3)为相关学科领域的学术研究提供创新的思路和实践经验。
4. 研究方法本文采用实验与理论相结合的方法,利用ROS(Robot Operating System)等机器人开发平台,设计并实现多传感器数据融合、地图构建和导航算法。
同时,通过实际机器人场景测试,评估所提出的算法的准确性、鲁棒性以及效率等方面的性能,验证所提出算法的可行性和实用性。
5. 计划进度该研究计划于2022年9月开始,计划分为以下阶段:(1)2022年9月-2023年3月,研究多传感器数据融合技术,实现机器人定位和环境感知。
多传感器融合技术在移动机器人中的应用
多传感器融合技术在移动机器人中的应用随着科技的快速发展,移动机器人在日常生活、工业生产和军事领域中的应用越来越广泛。
而多传感器融合技术的应用,为移动机器人的感知能力和决策能力提供了强大的支持。
多传感器融合技术是指将多个不同类型的传感器数据进行融合,从而提供更准确、全面的环境感知信息。
在移动机器人中,传感器可以包括视觉传感器、激光雷达、超声波传感器、陀螺仪、加速度计等。
这些传感器可以提供机器人所处环境的视觉、声音、距离、姿态等信息。
多传感器融合技术可以用于移动机器人的定位和导航。
通过融合不同传感器的数据,可以提高机器人的定位精度和稳定性。
比如,利用视觉传感器获取环境的图像信息,通过图像处理算法进行特征提取和匹配,结合激光雷达和陀螺仪的数据,可以实现机器人在复杂环境中的精确定位和导航。
多传感器融合技术还可以用于移动机器人的障碍物检测和避障。
通过融合视觉传感器、激光雷达和超声波传感器的数据,可以实现对环境中障碍物的快速、准确检测。
通过对障碍物的形状、距离和运动状态进行分析,机器人可以做出相应的避障决策,避免碰撞。
此外,多传感器融合技术还可以用于移动机器人的目标跟踪和识别。
通过融合视觉传感器和激光雷达的数据,可以实现对目标物体的快速、准确跟踪。
通过对目标物体的特征提取和匹配,机器人可以实现对目标的识别和分类,从而实现更智能化的交互和操作。
然而,多传感器融合技术在移动机器人中的应用还面临一些挑战。
首先是传感器数据的融合算法的设计和优化问题,如何有效地将不同传感器的数据进行融合,提取有用的信息,是一个复杂而关键的问题。
其次是传感器的选择和布局问题,不同传感器的特性和适用场景不同,如何选择合适的传感器,并合理布局在机器人上,也是一个需要考虑的问题。
综上所述,多传感器融合技术在移动机器人中的应用具有重要意义。
它可以提高机器人的感知和决策能力,实现更高效、安全、智能的移动机器人应用。
随着技术的不断进步和创新,相信多传感器融合技术将在移动机器人领域持续发展,为我们的生活和工作带来更多便利和创新。
机器人智能控制系统中的多传感器融合与定位技术研究

机器人智能控制系统中的多传感器融合与定位技术研究在机器人智能控制系统中,多传感器融合与定位技术发挥着重要的作用。
通过融合多种传感器的数据,机器人能够更准确地感知周围环境,并精确定位自身位置。
本文将详细介绍多传感器融合与定位技术在机器人智能控制系统中的研究和应用。
首先,多传感器融合技术是指将来自不同传感器的数据进行融合,以提高感知信息的可靠性和准确性。
在机器人智能控制系统中,常见的传感器包括摄像头、激光雷达、惯性导航系统等。
摄像头可以捕捉到图像信息,激光雷达可以测量距离和形状,惯性导航系统可以测量加速度和角速度。
将这些传感器的数据融合起来,可以获得更全面、准确的环境感知信息。
多传感器融合技术主要包括数据融合算法和融合框架。
数据融合算法根据传感器的数据特点,采用合适的数学模型和算法进行数据融合。
常见的数据融合算法包括卡尔曼滤波器、粒子滤波器、扩展卡尔曼滤波器等。
融合框架用于将不同传感器的数据进行整合和管理,确保数据的协调与一致性。
常用的融合框架包括传感器级融合、特征级融合和决策级融合等。
其次,定位技术是指机器人通过感知环境和自身位置,确定自己在空间中的具体位置。
定位技术对于机器人的导航和路径规划等任务至关重要。
目前,常用的机器人定位技术有惯性导航定位、视觉定位、激光定位和无线定位等。
惯性导航定位是利用惯性传感器对机器人的加速度和角速度进行测量,通过积分计算出机器人的位置和姿态。
惯性导航定位具有精度高、实时性好的特点,但其误差会随时间累积,导致定位的不准确。
视觉定位是利用机器人的摄像头获取环境中的图像信息,并通过图像处理和计算机视觉算法提取特征点或者匹配目标物体,从而确定机器人的位置。
视觉定位具有环境信息丰富、定位精度高的优势,但对环境光线和视角的变化比较敏感。
激光定位是利用激光雷达对周围环境进行扫描,通过测量物体的距离和形状,实现机器人的定位。
激光定位具有精度高、实时性好的特点,但对于透明物体或者反射物体的定位存在困难。
基于多传感器信息融合的移动机器人定位技术研究
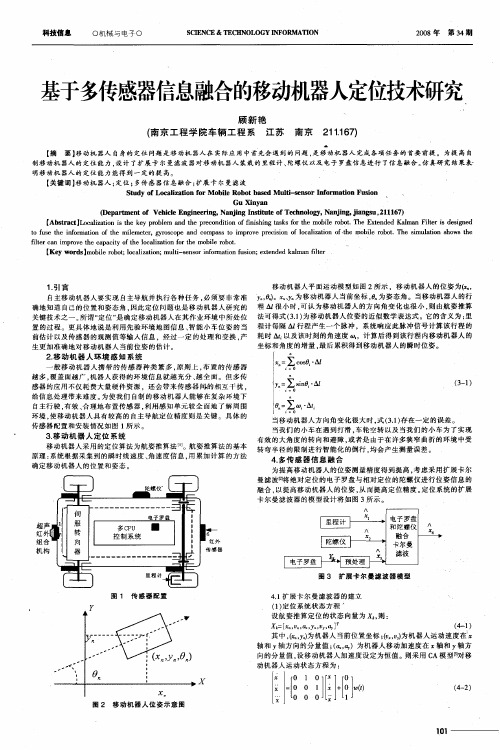
2 移 动 机 器 人 环境 感 知 系统 .
一
般移 动 机 器 人 携 带 的传 感 器 种 类 繁 多 , 则 上 , 原 布置 的 传 感 器
=
i= 0
∑c 。・ s
∑s △ i ・2 n (1 3) -
越 多 , 盖 面越 广 , 器 人 获 得 的 环 境 信 息 就 越充 分 、 全 面 。但 多 传 覆 机 越 感器 的应 用 不 仅 耗 费 大 量 硬 件 资 源 ,还会 带 来传 感 器 的 相 互 干 扰 , 给信 息处 理 带 来 难 度 。 使 我 们 自制 的 移动 机 器 人 能 够 在 复 杂 环 境 下 为 自主行 驶 , 效 、 理 地 布 置 传 感 器 , 用 感 知 单 元较 全 面 地 了 解 周 围 有 合 利 环境 , 移 动 机 器 人 具 有 较 高 的 自主 导 航 定 位 精 度则 是 关 键 。 具 体 的 使 传感 器 配置 和 安 装 情 况 如 图 1所示 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多传感器融合技术在机器人定位与导航中的
应用研究
随着社会的发展,人类对生产力和生产效率的追求也越来越高。
机器人作为一
种高效的生产力工具,正在逐渐被广泛应用于各个领域。
而机器人能否在复杂环境下正常工作,关键在于其定位和导航能力的优良与否。
目前,多传感器融合技术已成为提高机器人定位和导航精度、提高机器人灵活性和适应性的主要方法之一。
一、多传感器融合技术的概念与原理
多传感器融合技术是一种将多个传感器的数据信息统合起来,通过信息处理的
手段,使得所得到的结果更加精确、准确和完整的技术手段。
多传感器融合技术的实现主要是通过对多个传感器所采集数据的集成与同步,以提高数据的准确性和时效性,并通过一系列的算法和建模技术,来实现对所得数据的后处理和优化,从而得到更加精确和完整的物理信息。
二、多传感器融合技术在机器人定位与导航中的应用
传统的机器人定位和导航技术主要采用单一传感器进行数据采集和处理,如全
球定位系统(GPS)、激光雷达、相机和惯性导航等。
但由于单一传感器无法穷尽
所有不同环境下的定位与导航需求,必须结合多种传感器的优势来予以完善和提升。
例如,在集装箱堆场等复杂环境下,GPS不适用,但视觉传感器可以采集场地信息;在Kern风力机大型齿轮箱等机械设备的智能维护中,虽然能够通过使用内置
的振动传感器采集齿轮箱的振动信号,但由于一些噪声的干扰,采集的信号存在一定程度的误差和不准确性。
因此,通过融合传感器数据,以形成一个完整的多传感器融合系统,可以在不同环境下取得更好的定位和导航效果。
三、多传感器融合技术的优点
多传感器融合技术具有许多优点。
首先,多传感器融合技术能够避免单个传感
器系统在不同环境下出现误判和失效的问题,提高机器人定位和导航的稳定性和可靠性。
其次,多传感器融合技术能够集成不同类型的信息数据,并通过互补的方式,从不同角度获得信息,以提高定位和导航的精确度和全面性。
最后,多传感器融合技术可以采用多种算法技术来进行数据处理和优化,提高系统的灵活性和适应性,从而适用于多种不同应用场景的机器人系统。
四、多传感器融合技术的运用场景
多传感器融合技术可以广泛应用于不同领域的机器人系统中。
例如,在工业制
造领域,可以利用多传感器融合技术为机器人系统提供更加精确和全面的定位和导航信息,提高机器人的生产力和效率;在智能家居和服务机器人领域,可以使用多传感器融合技术实现机器人在复杂环境下的精确定位和精确导航,使其更好地为人们提供服务;在航空航天领域,多传感器融合技术可以用于实现无人飞行器的精确定位和自主导航功能。
五、结语
尽管还有许多挑战和问题需要克服和解决,但多传感器融合技术已经成为机器
人定位和导航领域的主流技术之一。
它不仅能够提高机器人的定位和导航精度和可靠性,同时还可以增加机器人系统的灵活性和适应性,在多种应用场景下发挥不同效果。
可以预见,随着多传感器融合技术的不断发展和进步,机器人将在更多的领域中发挥更大的作用和贡献。