电压电流反馈系统
充电器的反馈电路工作原理
充电器的反馈电路工作原理充电器是我们日常生活中必不可少的电子设备之一,它能够为手机、平板电脑、笔记本电脑等设备充电。
而充电器的反馈电路则是决定充电器性能的关键部分之一。
本文将从充电器的反馈电路工作原理进行详细介绍。
反馈电路是充电器中的一个重要部分,主要用于控制充电过程中的电流和电压,保证充电器的稳定性和安全性。
充电器的反馈电路主要包括电流反馈和电压反馈两个方面。
我们来看电流反馈。
在充电器中,通过电流反馈可以实现对充电电流的控制。
充电器的输出电流与输入电流之间存在一个比例关系。
当充电器输出电流不足时,反馈电路会自动增大输出电流,以保证充电器能够提供足够的电流给充电设备。
当充电器输出电流过大时,反馈电路会自动减小输出电流,以避免充电器过载,从而保护充电设备的安全。
接下来,我们来看电压反馈。
在充电器中,通过电压反馈可以实现对充电电压的控制。
充电器的输出电压与输入电压之间也存在一个比例关系。
当充电器输出电压过高时,反馈电路会自动降低输出电压,以避免充电设备受到过高的电压而损坏。
当充电器输出电压过低时,反馈电路会自动增加输出电压,以保证充电设备能够正常充电。
充电器的反馈电路实际上是一个闭环控制系统,通过不断监测充电电流和电压的变化,对充电器进行调节,以实现稳定的充电效果。
充电器的反馈电路通常由一个控制芯片和一些外部元件组成。
控制芯片是充电器反馈电路的核心部分,它负责监测充电电流和电压,并根据设定的电流和电压值,控制充电器的输出。
控制芯片通常具有多种保护功能,如过流保护、过压保护、过温保护等,以确保充电器和充电设备的安全运行。
除了控制芯片,充电器的反馈电路还包括一些外部元件,如电阻、电容、二极管等。
这些外部元件与控制芯片配合工作,起到稳定和调节电流和电压的作用。
总结起来,充电器的反馈电路是控制充电器输出电流和电压的重要部分,通过对充电电流和电压进行反馈监测和调节,保证充电器的稳定性和安全性。
充电器的反馈电路由控制芯片和外部元件组成,控制芯片负责监测和控制充电电流和电压,而外部元件起到稳定和调节电流和电压的作用。
电压反馈放大器与电流反馈放大器的区别
电压反馈放大器与电流反馈放大器的区别1.电压反馈放大器与电流反馈放大器的区别:1.带宽VS增益电压反馈型放大器的-3DB带宽由R1、Rf和跨导gm共同决定,这就是所谓的增益帯宽积的概念,增益增大,带宽成比例下降。
同时运放的稳定性有输入阻抗R1和反馈阻抗Rf共同决定。
而对于电流反馈型运放,它的增益和带宽是相互独立的,其-3DB带宽仅由Rf决定,可以通过设定Rf得到不同的带宽。
再设定R1得到不同的增益。
同时,其稳定性也仅受Rf影响。
2.反馈电阻的取值电流型运放的反馈电阻应根据数据手册在一个特定的范围内选取,而电压反馈型的反馈电阻的选取就相对而言宽松许多。
需要注意的是电容的阻抗随着频率的升高而降低,因而在电流反馈放大器的反馈回路中应谨慎使用纯电容性回路,一些在电压反馈型放大器中应用广泛的电路在电流反馈型放大器中可能导致振荡。
比如在电压反馈型放大器我们常会在反馈电阻Rf上并联一个电容Cf来限制运放的带宽从而减少运放的带宽噪声(Cf也常常可以帮助电压反馈型放大器稳定),这些如果运用到电流反馈放大器上,则十有八九会使你的电路振荡。
3.压摆率当信号较大时,压摆率常常比带宽更占据主导地位,比如同样用单位增益为280MHZ的放大器来缓冲10MHZ,5V的信号,电流反馈放大器能轻松完成,而电压反馈放大器的输出将呈现三角波,这是压摆率不足的典型表现。
通常来说,电压反馈放大器的压摆率在500V每us,而电流反馈放大器拥有数千V每us.4.如何选择两类芯片a,在低速精密信号处理中,基本看不到电流反馈放大器的身影,因为其直流精度远不如精密电压反馈放大器。
b.在高速信号处理中,应考虑设计中所需要的压摆率和增益帯宽积;一般而言,电压反馈放大器在10MHZ以下,低增益和小信号条件下会拥有更好的直流精度和失真性能;而电流反馈放大器在10MHZ以上,高增益和大信号调理中表现出更好的带宽和失真度。
当下面两种情况出现一种时,你就需要考虑一下选择电流反馈放大器:1,噪声增益大于4;2,信号频率大于10MHZ。
pwm电压环和电流环反馈的原理

pwm电压环和电流环反馈的原理
PWM(脉宽调制)电压环和电流环反馈是控制电源转换器的重要
部分,用于确保输出电压和电流稳定。
首先,让我们从PWM电压环
反馈的原理开始。
PWM电压环反馈的原理是通过比较实际输出电压与期望输出电
压的差异,然后调整PWM信号的占空比来实现电压调节。
具体来说,当实际输出电压低于期望值时,控制回路会增加PWM信号的占空比,从而增加开关管的导通时间,提高输出电压;相反,当实际输出电
压高于期望值时,控制回路会减小PWM信号的占空比,降低开关管
的导通时间,降低输出电压。
这种反馈机制能够使输出电压稳定在
期望值附近。
接下来是电流环反馈的原理。
电流环反馈通常用于控制开关电
源转换器的输出电流。
它的原理是通过比较实际输出电流与期望输
出电流的差异,然后调整PWM信号的占空比来实现电流调节。
当实
际输出电流低于期望值时,控制回路会增加PWM信号的占空比,增
加开关管的导通时间,提高输出电流;当实际输出电流高于期望值时,控制回路会减小PWM信号的占空比,降低开关管的导通时间,
降低输出电流。
这种反馈机制能够使输出电流稳定在期望值附近。
总的来说,PWM电压环和电流环反馈的原理都是基于比较实际输出与期望值的差异,然后通过调整PWM信号的占空比来实现稳定的电压和电流输出。
这种反馈机制能够有效地提高电源转换器的稳定性和性能。
电压反馈和电流反馈的区分
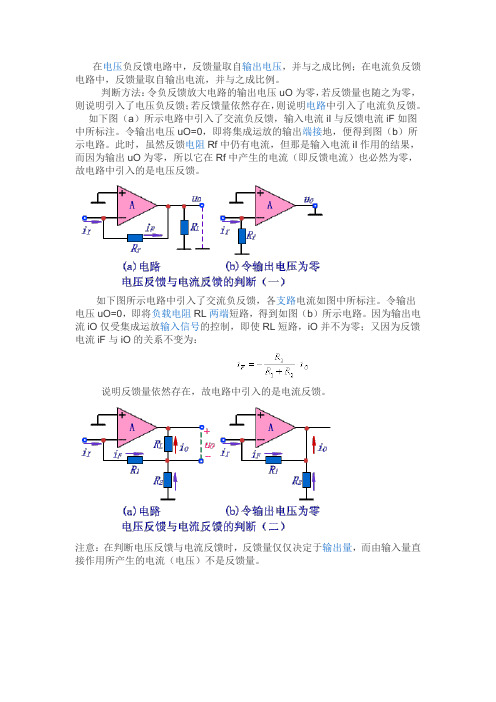
在电压负反馈电路中,反馈量取自输出电压,并与之成比例;在电流负反馈电路中,反馈量取自输出电流,并与之成比例。
判断方法:令负反馈放大电路的输出电压uO为零,若反馈量也随之为零,则说明引入了电压负反馈;若反馈量依然存在,则说明电路中引入了电流负反馈。
如下图(a)所示电路中引入了交流负反馈,输入电流iI与反馈电流iF如图中所标注。
令输出电压uO=0,即将集成运放的输出端接地,便得到图(b)所示电路。
此时,虽然反馈电阻Rf中仍有电流,但那是输入电流iI作用的结果,而因为输出uO为零,所以它在Rf中产生的电流(即反馈电流)也必然为零,故电路中引入的是电压反馈。
如下图所示电路中引入了交流负反馈,各支路电流如图中所标注。
令输出电压uO=0,即将负载电阻RL两端短路,得到如图(b)所示电路。
因为输出电流iO仅受集成运放输入信号的控制,即使RL短路,iO并不为零;又因为反馈电流iF与iO的关系不变为:
说明反馈量依然存在,故电路中引入的是电流反馈。
注意:在判断电压反馈与电流反馈时,反馈量仅仅决定于输出量,而由输入量直接作用所产生的电流(电压)不是反馈量。
1.7 电压反馈电流补偿控制的直流调速系统--1

电压负反馈信号的引出线应尽量靠近 电动机电枢两端。 电压反馈信号必须经过滤波
●
●
电压负反馈的调速系统不能弥补电枢 压降所造成的转速降落
Id
* Un ∆U + _ Un
Kp
Uc
Ks
பைடு நூலகம்
Udo +
Rpe _
Ud +
Ra _
E
n 1/Ce
γ
图 1-53 电压负反馈直流调速系统 - 稳态结构图
1.7.2 电流正反馈和补偿控制规律 电流正反馈和补偿控制规律
* K p K sU n
K p K s βI d
( R pe + Rs ) I d
K = γK P K S
电流正反馈作用的
K p K s βI d C e (1 + K )
项能够补偿两项
稳态速降, 稳态速降,当然就可以减小静差了
如果 1 + K − 1 + K − Ra = 0 就做到了无静差 无静差的条件:
K pKsβ
R pe + Rs
R + KRa β= = β cr K pKs
β cr
:临界电流反馈系数
R: 电枢回路总电阻, R
= R pe + R s + Ra
采样补偿控制的方法使静差为零, 采样补偿控制的方法使静差为零,叫做 “全补偿” 全补偿”
• “全补偿” 全补偿” 全补偿 • “欠补偿” 欠补偿” • “过补偿” 过补偿”
●
电流正反馈的作用又称作电流补偿控制
Id
Id β
U*
n
Rs+Rpe Ra
Ui + ∆U
电压、电流的反馈控制模式

电压、电流的反馈控制模式电压、电流的反馈控制模式现在的高频开关稳压电源主要有五种PWM反馈控制模式。
电源的输入电压、电流等信号在作为取样控制信号时,大多需经过处理。
针对不同的控制模式其处理方式也不同。
下面以由VDMOS开关器件构成的稳压正激型降压斩波器为例,叙述五种PWM反馈控制模式的进展过程、基本工作原理、电路原理暗示图、波形、特点及应用要`氪,以利于挑选应用及仿真建模讨论。
(1)电压反馈控制模式电压反馈控制模式是20世纪60年月后期高频开关稳压电源刚刚开头进展而采纳的一种控制办法。
该办法与一些须要的过电流庇护电路相结合,至今仍然在工业界被广泛应用。
如图1(a)所示为Buck 降压斩波器的电压模式控制原理图。
电压反馈控制模式惟独一个电压反馈闭环,且采纳的是脉冲宽度调制法,即将经电压误差放大器放大的慢变化的直流采样信号与恒定频率的三角波上斜坡信号相比较,经脉冲宽度调制得到一定宽度的脉冲控制信号,电路的各点波形如图1(a)所示。
逐个脉冲的限流庇护电路必需另外附加。
电压反馈控制模式的优点如下。
①PWM三角波幅值较大,脉冲宽度调整时具有较好的抗噪声裕量。
①占空比调整不受限制。
①对于多路输出电源而言,它们之间的交互调整特性较好。
①单一反馈电压闭环的设计、调试比较简单。
①对输出负载的变化有较好的响应调整。
电压反馈控制模式的缺点如下。
①对输入电压的变化动态响应较慢。
当输入电压骤然变小或负载阻抗骤然变小时,由于主电路中的输出电容C及电感L有较大的相移延时作用,输出电压的变小也延时滞后,而输出电压变小的信息还要经过电压误差放大器的补偿电路延时滞后,才干传至PWM比较器将脉宽展宽。
这两个延时滞后作用是动态响应慢的主要缘由。
①补偿网络设计原来就较为复杂,闭环增益随输入电压而变化的现象使其更为复杂。
①输出端的LC滤波器给控制环增强了双极点,在补偿设计误差放大器时,需要将主极点低频衰减,或者增强一个零点举行补偿。
①在控制磁芯饱和故障状态方面较为棘手和复杂。
电压电流双闭环原理

电压电流双闭环原理
电压电流双闭环原理是指电源的输出电压和负载电流都有相关的反馈控制回路,使得输出电压和负载电流始终保持稳定的控制策略。
这种控制方法常用于高精度和精密的电源应用中。
电压电流双闭环控制系统通常包含两部分:电压回路和电流回路。
电压回路负责测量并控制电源输出电压的大小,以保持稳定的输出电压。
电流回路则负责测量电源输出电流大小,并根据流经负载的电流反馈回路来实现对输出电流的闭环控制。
电源的电压回路通常包括一个比较器和一个反馈环。
比较器将输出电压信号与参考电压信号进行比较,并输出一个正向或反向的控制信号。
反馈环将控制信号送回至电源的输出端口,对输出电压进行调整。
这样,当输出电压偏离参考电压时,反馈环会自动对电源进行调整,并将输出电压维持在参考电压附近。
电流闭环控制则通过测量和控制负载电流来实现。
电压电流双闭环控制可以大大提高电源的稳定性和可靠性。
它可以弥补传统单电压闭环或单电流闭环的不足,确保电源提供稳定可靠的输出电压和电流。
同时,电压电流双闭环原理可以提高系统的响应速度和抗干扰能力,使得电源可以在各种不同的负载要求下保持均衡和稳定。
总之,电压电流双闭环原理是一种高效且精密的电源控制方式,可以保证输出电
压和电流的稳定性和可靠性,适用于各种电源应用中。
电压反馈与电流反馈
5. 反馈和负反馈放大电路
例1 判断图示电路反馈的类型。
令输出电压为零(uo=0)
则 uF=FUO=0
反馈的作用消失
+ 电压反馈
_
+ +
T _
+
F
+
+
_
_
模拟电子技术
5. 反馈和负反馈放大电路
例2 判断图示电路反馈的类型。
令输出电压为零(uo=0)
而反馈信号 uF=FUO0, +
反馈的作用存在
_ 电流反馈
+
_
+
_A
+
_
输入回路
输出回路
iO
+
_uO
RL
R
反馈网络F
模拟电子技术
谢 谢!
模拟电子技术
5. 反馈和负反馈放大电路
5.1.2 反馈的基本分类 1. 直流与交流反馈 2. 正反馈与负反馈 3. 电压反馈与电流反馈
模拟电子技术
5. 反馈和负反馈放大电路
输入信号
.
.
Xi
Xid
+
.
Xf
反馈电路.方框图
净输入信A 号
基本放大电路
.
F
反馈信号
反馈网络
图中
•
X——电压或电流信号
.
XO 输出信号
模拟电子技术
图
•
Xf
放大电路 反馈网络
•
ห้องสมุดไป่ตู้
RL
IO
模拟电子技术
5. 反馈和负反馈放大电路
c. 判断电压和电流反. 馈的方法
.
.
Xi + Xid
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
式中,
可见, 系统的灵敏度和稳定性对 Rs 的要求是相矛盾的。因 为 从 式(16)可 以 证 明 , 其 分 母 D(S)Rs 将 会 随 着 Rs 的 增 大 而 增 大, 因此, 欲减小 Φ(s)对 Rs 的灵敏度, 必须增大 Rs 的值, 但由前 面分析可知, 增大 Rs 又 会 导 致 系 统 的 静 特 性 上 翘 且 动 态 不 稳 定。需要指出的是, 这一结论同自动控制理论中所得出的“稳态 精度与稳定性对开环增益 K 的要求是相矛盾的”结论完全一致。
《现场总线技术应用 200 例》
您的论文得到两院院士关注
电子设计
工作。根据系统原理图可得出带电流正反馈的电压负反馈调速 系统静态结构图。如图 2 所示。
由静态结构图可推导出系统静特性方程为:
式中 K=γKpKs, Rpe— — — 电 力 电 子 变 换 器 内 阻 (Ω) Ra— — — 电 动 机 电 枢 电 阻 (Ω) Kp— — — 放 大 器 的 电 压 放 大 系 数 Ks— — — 电 力 电 子 变 换 器 的 电 压 放 大 系 数 γ— — — 电 压 负 反 馈 系 数 Ce— ——额定励磁下电动机电动势系数(V.min/r), Ce=KeФN 由(1) 式中可见, 表示电流正反馈作用的一项 KpKsβ/Ce(1+ k)能够补偿另两项静态速降,减少静差。需要注 意 的 是, 从 静 特 性 方 程 式(1)可 以 看 出, 它 并 非 用(1+K) 去 除 Δn 项 来 使 静 差 减 小, 而是用一个正项去补偿原系统中负的转速降, 因而称为"补 偿控制"。具体的补偿效果有多大, 由系统中各个环节的参数决 定。 如果利用补偿控制的参数配合使静差为零, 称之为全补 偿; 如果补偿后仍然存在一些静差, 则称之为欠补偿; 如果补偿 后使系统的静特性上翘, 则称之为 过 补 偿 。 由 静 特 性 方 程 式(2) 可求出全补偿的条件。 令
当 Rs 增大而其 它 参 数 不 变 时 , 将 会 出 现 过 补 偿 , 系 统 不 稳 定。分析如下:
1)从 静 特 性 的 角 度 分 析 :由 无 静 差 的 条 件 式
可以看出, 当 Rs 增大时, β>βcr,将会出现过补偿; 2)从 稳 定 性 的 角 度 分 析 :令
两边对 Rs 求导,
β= RoRs/R2 式 中 R0- - - 运 放 器 输 入 端 转 速 给 定 和 电 压 负 反 馈 输 入 回 路电阻; R2- - - 电流正反馈输入回路电阻。
图 1 带电压负反馈和电流正反馈的直流调速系统原理图 申 昕: 讲师 硕士研究生
- 266 - 360元 / 年 邮局订阅号: 82-946
技 术
4 参数分析
4.1 参数变化对动、静态特性的影响(定性分析) 下面以参数 Rs 为例进行分析, 将 β= RoRs/R2 代入(8)式得
创 新
3 数学模型与稳定性分析
从静态分析, 电流正反馈代表了对负载扰动的补偿控制, 从动态分析, 电流正反馈包含了动态电流和负载电流两部分, 因而电流正反馈不仅仅是对负载扰动的补偿, 而且还有助于提 高调速系统的稳态性能。根据原理图及系统中各个环节的控制 规 律 , 在 忽 略 电 力 电 子 变 换 器 的 滞 后 时 间 常 数 Ts 并 认 为 Tl=0 的情况下, 可得到其数学模型的动态结构图如图 3 所示。
(1.四川大学;2.成都纺织高等专科学校)申 昕 1,2 周 新 志 1
S HEN XIN ZHOU XINZHI
摘要:本文 简 要 介 绍 了 基 于 电 压 负 反 馈 和 电 流 正 反 馈 的 直 流 调 速 控 制 原 理, 分 析 了 带 电 压 负 反 馈 和 电 流 补 偿 控 制 调 速 系 统 的数学模型, 着重分析和讨论了系统的稳定性, 证明了全补偿的条件就是系统临界稳定的条件。并且就参数变化对控制系 统的影响作了全面分析。 关键词:电压负反馈; 电流补偿; 稳定性 中图分类号:TP202+.1 文献标识码:A
技 5 结论
术
本文依据电压负反馈和电流补偿调速控制原理, 对基于电
压负反馈和电流补偿控制直流调速系统的数学模型和稳定条
创 件进行了分析, 并就参数的变化对稳定性的具体影响进行了详 细的讨论。 因此, 对于调速指标要求不高(D≤20, S≥10%)的小
新 容量直流调速系统来讲, 在实际应用中方案是可行的。 本文的主要创新点在于提出了基于电压负反馈和电流补偿
and emphasizes the importance of analysis and discussion of the system’s stability, proves the conclusion that condition of complete
技 compensate is the condition of the system critical stability. and analyses comprehensively the effect of what the control system accept-
由控制理论的劳斯稳定判据可得系统稳定的条件
)
临界稳定的条件 )
比较式(3)和式(8)可以看 出 , 对 于 带 电 压 负 反 馈 和 电 流 正 反 馈的调速系统的临界稳定条件正是其静特性的全补偿条件。需 要注意的是, 在实际的调速系统中不能用到全补偿这种临界状 态, 因为如果设计好全补偿之后, 一旦参数受温度等因素的影响 而发生变化, 补偿的条件就受到破坏而使静特性偏到过补偿区 域, 不仅静特性要上翘, 而且还会出现动态不稳定。
经整理得: 《P LC 技术应用 200 例》
当 G(S)的变化很小时, 上式可改写为
邮局订阅号: 82-946 360 元 / 年 - 267 -
电子设计
中 文 核 心 期 刊 《 微 计 算 机 信 息 》( 嵌 入 式 与 S OC )2007 年 第 23 卷 第 10-2 期
式中, SGT 表示与 G 有关的 T 的灵敏度。通常需要确定的灵 敏度是 SαT.,其中 α为 G(S)的一个易受环境变化影响的参数。利 用链的规则, 可以求得
由上述定义, 根据式(5)可以求得 φ(s)对 Rs 的灵敏度如下,
成, 具有 40 dB 的增益和 41 MHz 的小信号带宽, 在电 路 中 起 到 放大中频信号和处理脉冲噪声的作用。在实际测试中放大倍数 达不到设计要求 , 因此中频放大输出管 脚 16 通 过 465K 的 陶 瓷 滤波器后, 仍需后级放大电路。
就可实现无静差, 经整理可得无静差的条件是 ( 取 动 系 统 机 电 时 间 常 数 ( 秒 ), Tm= GD2R/(375 CmCe) GD2— — — 电 力 拖 动 系 统 折 算 到 电 动 机 轴 上 的 飞 轮 惯 量 (N.m2) Cm— — — 额 定 励 磁 下 电 动 机 的 转 矩 系 数 (N.m/A),Cm=30Ce/π Tl— ——电枢回路电磁时间常数(秒), Tl=L/R; 由传递函数可得其特征方程:
偿 控 制 措 施 , 可 以 使 系 统 的 动 、静 态 性 能 接 近 转 速 负 反 馈 的 性
能。因此, 对该调速系统的数学模型和稳定性进行全面分析讨
论就尤为必要。
2 电压负反馈和电流补偿调速控制
原理
由直流他励电动机的转速方程可知, 在转速不很低时, 可忽
略电枢两端压降, 则直流电动机的转速与端电压近似成正比。
ed for parameter’s change.
术 Key wor ds:voltage negative feedback,cur r ent compensate,stability
创 1 引言
新
对 于 调 速 指 标 要 求 不 高(D≤20, S≥10%)的 小 容 量 直 流 调
速系统来讲, 在采用电压负反馈的基础上再加以电流正反馈补
当 SA605 使 用 工 作 电 压 5V 时 , DDS 输 出 10MHz、 使 用 HP8116A 型 信 号 发 生 器 通 过 前 级 高 频 放 大 滤 波 电 路 后 产 生 9.55MHz 信 号 代 替 空 间 RF 信 号 时 , 使 用 TektronixTDS2022 型 示波器, 实测波形图如下:
因此, 采用电压负反馈能够代替转速负反馈的作用,而电压的检
测显然要比转速检测方便得多, 这是由于采用电压负反馈只是
用一个起分压作用的电位器作反馈检测元件就可以了。同时在
电路中加入电流正反馈补偿控制使系统的性能与原来转速反馈
系统基本相同。带电压负反馈和电流正反馈的直流调速系统原
理图如图 1 所示。
图中 , UPE 为 电 力 电 子 变 换 器 , 主 电 路 中 串 入 电 流 取 样 电 阻 Rs, 由 IdRs 取电流正反馈信号 Ui。另外串接 Rs 的位置须使 IdRs 的极性与转速给定信号 Un* 的极性一致, 而与电压负反馈 信号 Uu=γUd 极性相反。电压负反馈和转速给定通过输入回路 电阻 R0 引入到运算放大器的输入端, 而电流正 反 馈 通 过 输 入 回路电阻 R2 引入到运算放大器的输入端。定 义 电 流 正 反 馈 系 数 β为:
图 3 动态结构图 根据动态结构图, 由梅逊公式可求得其闭环传递函数:
由于 KpKsRo- R2>0, dy(t)/dRs>0, y(t)将会因 Rs 的增大而大 于 0, 而稳定的条件是 y(t)=0。
可见, 不但系 统 静 特 性 会 因 Rs 的 增 大 而 上 翘 , 而 且 系 统 稳 定的条件也不成立, 因此系统变得不稳定。
图 2 电压负反馈和电流补偿系统的静态结构图 当负载增大而使静态速降有所增加时, 电流正反馈信号 Ui 也随之增大, 通过运算放大器使可控硅整流装置控制电压随之 增大, 进而补偿转速的下降。值得注意的是, 在实际工作时电压 反馈信号必须经过滤波以后才能引入到运算放大器, 因为电力 电子变换器的输出除 了直流分量 Ud 之外, 还含有交 流 分 量 , 如 果把交流分量引入到运算放大器, 不但起不到调节作用, 而且还 会产生干扰, 甚至会造成放大器局部饱和, 从而破坏系统的正常 工作。其次, 本电路适合于小容量调速系统, 对于电动机容量较 大、电压较高的系统最好改用隔离变压器输出电压反馈信号, 使 主电路与控制电路之间无直接电的联系, 以确保系统能安全地