PID电加热炉温度控制系统
pid控温原理

pid控温原理PID控温原理。
PID控温原理是指通过比例、积分和微分三个环节来控制温度的一种方法。
PID是Proportional-Integral-Derivative的缩写,即比例、积分、微分控制。
在工业生产中,温度控制是非常重要的,而PID控温原理正是一种高效、稳定的控温方法。
首先,我们来看一下PID控温原理中的比例控制。
比例控制是根据温度偏差的大小来控制加热或冷却的力度。
当温度偏差越大时,控制系统输出的控制量也越大,从而加快温度的变化速度,使温度尽快接近设定值。
比例控制的作用是快速消除温度偏差,但无法完全消除偏差,因为它只是根据偏差的大小来控制力度,而无法考虑到温度变化的趋势。
其次,积分控制在PID控温原理中起着重要作用。
积分控制是根据温度偏差的累积值来调节控制量,使温度偏差逐渐趋于零。
当温度偏差持续存在时,积分控制会逐渐增大控制量,以消除温度偏差。
积分控制的作用是消除温度偏差的累积效应,使温度稳定在设定值附近。
最后,微分控制在PID控温原理中也发挥着重要作用。
微分控制是根据温度变化的速度来调节控制量,以预测未来的温度变化趋势。
当温度变化速度较快时,微分控制会增大控制量,以抑制温度的突然变化,使温度更加稳定。
微分控制的作用是预测温度变化趋势,减小温度波动。
综合比例、积分和微分控制,PID控温原理可以实现对温度的精确控制。
比例控制快速消除温度偏差,积分控制消除温度偏差的累积效应,微分控制预测温度变化趋势,三者结合起来可以使温度稳定在设定值附近,提高生产效率,保证产品质量。
在实际应用中,PID控温原理可以通过传感器实时监测温度,将监测到的温度信号与设定值进行比较,计算出温度偏差,然后经过比例、积分和微分控制,输出相应的控制量,控制加热或冷却设备,从而实现对温度的精确控制。
PID控温原理已经广泛应用于各种工业生产中,如化工、食品加工、医药制造等领域。
总的来说,PID控温原理是一种高效、稳定的温度控制方法,通过比例、积分和微分控制,可以实现对温度的精确控制,提高生产效率,保证产品质量,具有很高的实用价值。
温度控制系统中采用智能 PID 控制的方法

温度控制系统中采用智能PID 控制的方法摘要:由于程序升温对象在不同温区其数学模型不同,而传统的PID 控制方法难以保证控制质量。
为此,介绍了在可编程调节器(SLP C)构成的热电偶检定炉温度控制系统中采用智能PID 控制的方法,其将批量PID 控制方法应用于该系统,使得给定值不断大幅度变化的随动系统的控制做到快速无超调。
实验结果表明,控制效果较以往同类系统有了很大的提高。
关键词:自动控制技术智能PID 控制理论研究温度温区0 引言PID 控制是自动控制中产生最早的一种控制方法,在实际控制工程中的应用最广。
据不完全统计,在工业过程控制和航空航天控制等领域,应用PID控制占80%以上。
然而,传统的PID 控制算法有它的局限性和不足之处,只有在系统模型参数为非时变的情况下才能获得理想的效果,当应用到时变系统时,系统的性能会变差,甚至不稳定。
另外,在对PID 参数整定过程中,往往得不到全局性的最优值。
因此,这种控制作用无法从根本上解决动态品质和稳定精度的矛盾。
为此,以实验室热电偶检定炉温度控制系统为例借助于可编程调节器(SLPC),说明在程序升温控制系统中如何实现智能PID控制。
1 程序升温控制系统的结构及原理图1 为采用可编程调节器SLPC 构成的热电偶检定炉温度控制系统原理图,为一个具有较大的滞后性、非线性的时变系统,在热电偶校验过程中,要求炉温随时间按一定的顺序变化,即该控制系统中控制器的给定信号是按一定的顺序变化的。
在图1 中,传感器经温度变送器将温度信号转换为1-5V电压信号,作为SLPC 的测量信号,调节器的给定值采用程序曲线由SLPC 软件包内PGM1 功能模块经编程后提供,SLPC 的输出信号经信号隔离模块后送给可控硅移相触发模块,从而控制可控硅的导通角大小,实现程序控温的目的。
在SLPC 中使控制器置反作用:MODE2=1 ,CNT1=3,C 状态(串接外给定,批量PID 控制)。
其中,给定程序曲线用户可根据需要通过对SLPC 进行编程调整。
PID控制最通俗的解释与PID参数的整定方法
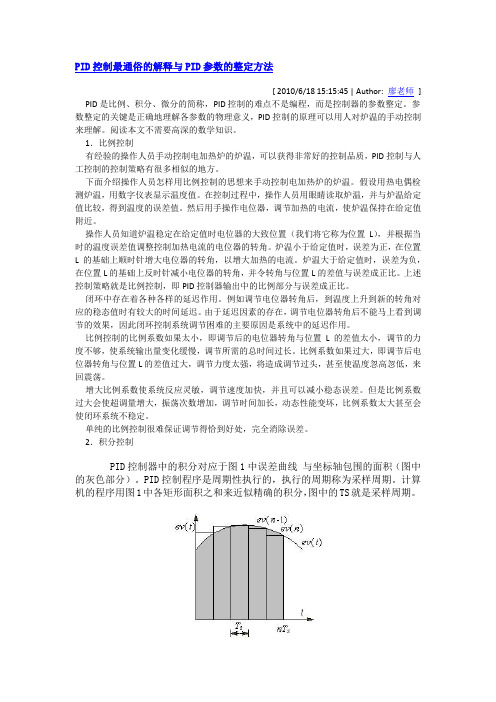
PID控制最通俗的解释与PID参数的整定方法[ 2010/6/18 15:15:45 | Author: 廖老师] PID是比例、积分、微分的简称,PID控制的难点不是编程,而是控制器的参数整定。
参数整定的关键是正确地理解各参数的物理意义,PID控制的原理可以用人对炉温的手动控制来理解。
阅读本文不需要高深的数学知识。
1.比例控制有经验的操作人员手动控制电加热炉的炉温,可以获得非常好的控制品质,PID控制与人工控制的控制策略有很多相似的地方。
下面介绍操作人员怎样用比例控制的思想来手动控制电加热炉的炉温。
假设用热电偶检测炉温,用数字仪表显示温度值。
在控制过程中,操作人员用眼睛读取炉温,并与炉温给定值比较,得到温度的误差值。
然后用手操作电位器,调节加热的电流,使炉温保持在给定值附近。
操作人员知道炉温稳定在给定值时电位器的大致位置(我们将它称为位置L),并根据当时的温度误差值调整控制加热电流的电位器的转角。
炉温小于给定值时,误差为正,在位置L的基础上顺时针增大电位器的转角,以增大加热的电流。
炉温大于给定值时,误差为负,在位置L的基础上反时针减小电位器的转角,并令转角与位置L的差值与误差成正比。
上述控制策略就是比例控制,即PID控制器输出中的比例部分与误差成正比。
闭环中存在着各种各样的延迟作用。
例如调节电位器转角后,到温度上升到新的转角对应的稳态值时有较大的时间延迟。
由于延迟因素的存在,调节电位器转角后不能马上看到调节的效果,因此闭环控制系统调节困难的主要原因是系统中的延迟作用。
比例控制的比例系数如果太小,即调节后的电位器转角与位置L的差值太小,调节的力度不够,使系统输出量变化缓慢,调节所需的总时间过长。
比例系数如果过大,即调节后电位器转角与位置L的差值过大,调节力度太强,将造成调节过头,甚至使温度忽高忽低,来回震荡。
增大比例系数使系统反应灵敏,调节速度加快,并且可以减小稳态误差。
但是比例系数过大会使超调量增大,振荡次数增加,调节时间加长,动态性能变坏,比例系数太大甚至会使闭环系统不稳定。
电加热器温度的数字PID控制
2013 届本科毕业设计(论文)电加热器温度的数字PID控制The digital PID control of electric heater学院:工学院专业班级:电子信息工程0902班姓名:王阿东学号: 0901********指导教师:赵世强副教授完成时间: 2013年4月10日二〇一三年四月论文题目:电加热器温度的数字PID控制专业:电子信息工程学生:王阿东签名:指导教师:赵世强签名:摘要温度是重要的物理量,温度的测量和控制,在工业生产和科研工作中都非常重要。
本文介绍了一种以STC89C52单片机为检测控制中心的数字式水温自动控制系统。
温度测量部分采用单总线集成温度传感器DS18B20,使系统简单可靠,且易于操作。
温度设置部分采用四个独立按键组成,显示部分采用四位共阴数码管显示,使系统变得简便而高效。
温度控制采用PID数字控制算法,通过计算偏差值来控制光耦合和可控硅的通断,从而控制加热器的加热程度。
实际调试表明,采用PID算法能使温度稳定在设定值附近。
关键词:PID算法;单片机;温度控制;光耦合;可控硅Title: The digital PID control of electric heaterMajor:Electronic information engineeringName:Wang Adong Signature: Supervisor:Zhao Shiqiang Signature:ABSTRACTTemperature is an important physical quantities,The Temperature's measurement and control are very important In industrial production and scientific research work.This article introduces a automatic digital water's temperature control system using the STC89C52 microcontroller as the detect and control center.The temperature measurement part uses the one bus integrated temperature sensorDS18B20 ,which making the system more Simple and reliable,And easy tooperate.Temperature setting part is made up of four separate buttons,and Displaypart adopts four Led Display to display, which made the system easy and efficient.The Temperature is controled by the PID Digital control algorithm.The heater uses the common fast heater which the Ordinary families commonly used.Key words: PID algorithm;MCU;Temperature control;Optocoupler;Silicon controlled目录前言 (1)1硬件系统设计 (2)1.1系统总体框图 (2)1.2单片机系统 (3)1.2.1 单片STC89C52 (3)1.3数字温度传感器DS18B20 (5)1.3.1单线数字温度计DSl8B20 介绍 (4)1.3.2 DSl8B20 工作过程及时序 (5)1.3.3 DS18B20连接图 (5)1.4温度显示部分 (7)1.5 温度设定部分 (7)1.6 光耦器件 (8)1.6.1光电耦合器件简介 (7)1.6.2 光电隔离技术的应用 (7)1.6.3 光耦器件MOC3040 (8)1.7可控硅 (10)1.7.1可控硅简介 (8)2 PID算法 (13)2.1 PID算法简介 (13)2.2 PID算法的程序设计 (15)2.3 PID算法参数整定方法 (16)3软件设计 (19)3.1PID控制流程 (19)3.2系统软件设计总流程图 (20)4结语 (21)参考文献 (23)致谢 (20)附录 (25)西安外事学院本科毕业设计(论文)前言温度控制已成为工业生产、科研领域中很重要的一个环节, 能否成功地将温度控制在需要的范围内关系到整个工作的成败。
pid 加热算法

PID(比例-积分-微分)加热算法是一种常用的控制算法,用于控制加热设备的温度。
它通过调整加热设备的功率输出,使实际温度接近或达到设定的目标温度。
PID加热算法的核心思想是根据当前温度与目标温度之间的偏差,以及过去一段时间内的偏差积分和偏差的变化率,来计算出控制量,从而控制加热设备的功率输出。
具体来说,PID加热算法包括以下三个部分:
1.比例(P)控制:根据当前温度与目标温度之间的偏差,按照一定的比例系数计算出控制量。
比
例系数越大,控制量对偏差的响应越敏感,但也可能导致系统不稳定。
2.积分(I)控制:为了消除静态误差,PID算法引入了积分项。
积分项是对过去一段时间内偏差的
积分,用于调整控制量,使系统逐渐逼近目标温度。
积分项的引入可能会增加系统的稳定性,但也可能导致系统响应变慢。
3.微分(D)控制:微分项反映了偏差的变化率,用于预测未来的偏差趋势。
通过引入微分项,PID
算法可以提前调整控制量,从而提高系统的响应速度。
但微分项的引入也可能导致系统不稳定,尤其是在噪声干扰较大的情况下。
在实际应用中,PID加热算法通常需要根据具体的加热设备和应用场景进行调整和优化。
这包括选择合适的比例系数、积分系数和微分系数,以及确定控制量的输出范围等。
此外,还需要考虑系统的稳定性、响应速度和抗干扰能力等因素。
总之,PID加热算法是一种有效的温度控制方法,通过合理调整算法参数和控制策略,可以实现精准的温度控制,提高加热设备的性能和稳定性。
基于SMITH-PID的电阻炉温度控制系统设计

课程设计任务书摘要 (3)第1章课程设计方案 (1)1.1 概述 (1)1.2 系统组成总体结构 (1)第2章硬件设计 (2)2.1器件选择 (2)2.2 控制器 (2)2.3电源部分 (2)2.4输入输出通道设计 (3)2.4.1温度输入电路 (3)2.4.2信号输出电路 (3)第3章软件设计 (5)3.1系统流程图 (5)3.2 PID算法流程图 (6)3.3程序流程图 (7)第4章常规PID控制器设计 (8)4.1 PID概述 (8)4.2数字PID控制器 (8)4.3 PID调节器参数对系统性能的影响 (9)第5章温度控制系统的smith预估控制器设计 (11)5.1史密斯(smith)预估控制 (11)5.2史密斯控制器方案设计 (13)第6章Smith预估补偿控制的Matlab仿真与实验 (16)6.1 Matlab仿真软件的介绍 (16)6.2采用Matlab系统仿真 (16)第7章锅炉夹套水温pid控制系统 (17)7.1 课程设计目的 (17)7.2 被控对象 (17)7.3 检测仪表 (18)7.3 执行机构 (18)7.4 控制原理框图 (19)7.5 实验内容与步骤 (20)第8章组态软件界面、逻辑、代码 (23)8.1 MCGS组态软件 (23)8.2 组态软件设计 (25)第9章数据采集硬件系统构件、连线 (26)9.1数据采集硬件系统构件 (26)9.2硬件系统连线 (26)第10章实验结果曲线及分析 (27)总结 (29)参考文献 (30)现代工业生产过程中,不少工业对象存在着纯滞后时间。
这种纯滞后时间或者是由于物料或能量传输过程中所引起的。
或者是由于对象中多容积所引起的,或者是高阶对象低阶近似后所形成的等效滞后。
在纯滞后过程中,由于过程控制通道中存在纯滞后,使得被控量不能及时反映系统所承受的扰动。
因此这样的过程必然会产生较明显的超调量和需要较长的调节时间,被公认为是较难控制的过程,其难控制程度将随着纯滞后工占整个过程动态时间参数的比例增加而增加。
pid温度控制器的工作原理
PID温度控制器的工作原理1. 简介PID(比例-积分-微分)是一种常用的控制算法,用于实现对温度等物理量的精确控制。
PID温度控制器是基于PID算法设计的一种设备,用于测量和控制温度。
它通常由传感器、控制器和执行器组成,可以通过调节执行器的输出来维持温度在设定值附近。
2. 基本原理PID温度控制器的工作原理基于反馈控制系统的基本原理。
它通过不断测量和比较实际温度与设定值之间的差异,并根据差异来调整执行器的输出,使得实际温度逐渐接近设定值。
2.1 比例控制比例控制是PID算法中最基本的部分。
它根据实际温度与设定值之间的差异,计算出一个比例项,并将其乘以一个比例系数Kp。
这个比例项表示了输出应该调整多少来消除差异。
具体来说,假设实际温度为T,设定值为Tset,那么比例项P就等于(P = Tset - T)。
然后将P乘以比例系数Kp,得到比例控制的输出值。
2.2 积分控制积分控制是为了消除比例控制中的稳态误差而引入的。
稳态误差是指当温度接近设定值时,由于比例项无法完全消除差异,导致温度始终略微偏离设定值。
积分控制通过对比例项进行积分操作来解决这个问题。
具体来说,将比例项P累加起来,并乘以一个积分系数Ki。
这样就得到了积分项I。
I = I + P然后将积分项I乘以积分系数Ki,得到积分控制的输出值。
2.3 微分控制微分控制是为了改善系统的响应速度而引入的。
当温度变化剧烈时,仅仅使用比例和积分控制可能导致系统反应过慢。
微分控制通过计算温度变化率的负反馈来提高系统的响应速度。
具体来说,将温度变化率与一个微分系数Kd相乘,得到微分项D。
D = Kd * (T - Tprev)其中Tprev表示上一个采样周期的温度值。
然后将微分项D乘以微分系数Kd,得到微分控制的输出值。
2.4 PID控制PID控制将比例、积分和微分三个部分结合起来,通过调节它们的系数来实现对温度的精确控制。
PID输出值 = Kp * P + Ki * I + Kd * D其中Kp、Ki和Kd分别是比例、积分和微分控制的系数。
基于参数辨识的仿人智能PID电加热炉温度控制
s ltditlg n o to duttep rmees f h I o tolr h et f h el i ae el e t nr l oa js aa tr e D c n rl .T ets o era mu n i c t h ot P e t -
o h y t m' o e -o p s e e p n e d n i h a a e e s o h l c rc h a e sfr to d r ft e s s e s p n l o t p r s o s ,i e tf t e p r m t r ft e e e t i e t r s - r e y i p u i e a d lo — i e t e l s tme d l y mo e n l ; h n, d sg h y t m i e r f r c s o e , a d t n h n e in t e s se S l a o e a tm d l n u e t e n
Ch n ) ia
Ab ta t Th lo i m n l d sf l wi gf u tp .Fisl sr c : eag rt h icu e ol n o rse s o rty,b s do ei p ta do t u a a a e n t u n u p t t h n d
p r me e so h I c n r l rwi o o mu a ;i h r c s ,a p y t em eh do u n aa tr ft eP D o to l t s mef r le n t ep o e s p l h t o fh ma e h
t e c n r l a r v d t a h l o ih c n b p l d o a i u l c rc h a e y t m s n i o t o s p o e h tt e a g rt m a ea p i n v ro s e e t i e t r s se ,a d m h e i a y t p o r m o t e p e ma h n , a d c n o t o t e i e f y a c r s o s , ses o r ga n h u p r c ie n a c n r l h t o d n mi e p n e m m a l m v r h o n r o fs a l t t s i e s n b e r n e x mu o e s o ta d e r r o t b e s a u n f r a o a l a g . l Ke r s l c rc h a e ;p r me e d n iia i n P D o t o ; h ma — i u a e n e l e t y wo d :e e t i e t r a a t r i e tf t ; I c n r l u n s c o m ltd it l g n i
PID温度自动控制设计
90 3.681
5.733 6.137 6.539 6.939 7.338 7.737
9.745 10.151 10.560 10.969 11.381 11.793
300 400 500 600 700 800 900 1000 1100 1200
12.207 12.623 13.039 13.456 13.874 14.292 14.712 15.132 15.552 15.974
如图所示。
(2 )模拟运算放大电路
系统硬件的设计
? 从热电偶输出的热电势信号 最多不过几十毫伏(一般为0 到56 mV),信号需经运放放 大;且其中包含工频、静电 和磁耦合等共模干扰,对这 种电路放大就需要放大电路 具有很高的共模抑制比以及 高增益、低噪声和高输入阻 抗,因此宜采用测量放大电 路。测量放大器的输入阻抗 高,易与各种信号源匹配, 并且输入失调电压和输入失 调电流及输入偏置电流小, 温漂也较小,因而其稳定性 好。总共有4路模拟运算放大 电路。右图为其中一路模拟 运算放大电路。
16.395 16.818 17.241 17.664 18.088 18.513 18.938 19.363 19.788 20.214
20.640 21.066 21.493 21.919 22.346 22.772 23.198 23.624 24.050 24.476
24.902 25.327 25.751 26.176 26.599 27.022 27.445 27.867 28.288 28.709
PID调节温度自动控制的设计
LOGO
论文的结构和主要内容
? 第一章 电阻炉温度控制系统总体设计 ? 第二章 系统硬件设计 ? 第三章 系统软件设计 ? 第四章 全文总结
(完整版)PID控制详解
PID控制原理和特点工程实际中,应用最为广泛调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。
PID 控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制主要技术之一.当被控对象结构和参数不能完全掌握,或不到精确数学模型时,控制理论其它技术难以采用时,系统控制器结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便.即当我们不完全了解一个系统和被控对象﹐或不能有效测量手段来获系统参数时,最适合用PID控制技术。
PID控制,实际中也有PI和PD控制.PID控制器就是系统误差,利用比例、积分、微分计算出控制量进行控制。
1、比例控制(P):比例控制是最常用的控制手段之一,比方说我们控制一个加热器的恒温100度,当开始加热时,离目标温度相差比较远,这时我们通常会加大加热,使温度快速上升,当温度超过100度时,我们则关闭输出,通常我们会使用这样一个函数e(t) = SP – y(t)-u(t) = e(t)*PSP——设定值e(t)——误差值y(t)——反馈值u(t)——输出值P——比例系数滞后性不是很大的控制对象使用比例控制方式就可以满足控制要求,但很多被控对象中因为有滞后性。
也就是如果设定温度是200度,当采用比例方式控制时,如果P选择比较大,则会出现当温度达到200度输出为0后,温度仍然会止不住的向上爬升,比方说升至230度,当温度超过200度太多后又开始回落,尽管这时输出开始出力加热,但温度仍然会向下跌落一定的温度才会止跌回升,比方说降至170度,最后整个系统会稳定在一定的范围内进行振荡。
如果这个振荡的幅度是允许的比方说家用电器的控制,那则可以选用比例控制2、比例积分控制(PI):积分的存在是针对比例控制要不就是有差值要不就是振荡的这种特点提出的改进,它常与比例一块进行控制,也就是PI控制。
其公式有很多种,但大多差别不大,标准公式如下:u(t) = Kp*e(t) + Ki∑e(t) +u0u(t)—-输出Kp--比例放大系数Ki——积分放大系数e(t)——误差u0——控制量基准值(基础偏差)大家可以看到积分项是一个历史误差的累积值,如果光用比例控制时,我们知道要不就是达不到设定值要不就是振荡,在使用了积分项后就可以解决达不到设定值的静态误差问题,比方说一个控制中使用了PI控制后,如果存在静态误差,输出始终达不到设定值,这时积分项的误差累积值会越来越大,这个累积值乘上Ki 后会在输出的比重中越占越多,使输出u(t)越来越大,最终达到消除静态误差的目的PI两个结合使用的情况下,我们的调整方式如下:1、先将I值设为0,将P值放至比较大,当出现稳定振荡时,我们再减小P值直到P值不振荡或者振荡很小为止(术语叫临界振荡状态),在有些情况下,我们还可以在些P值的基础上再加大一点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
龙源期刊网 http://www.qikan.com.cn
PID电加热炉温度控制系统
作者:李天婧
来源:《中国高新技术企业》2013年第18期
摘要:PID控制器由于具有操作简单、算法通俗、效果良好等优势,因而在工业领域应用
广泛,比如化工行业、轻热工行业、治金机械行业等。电炉作为一种加热系统,有着大滞后
性、非线性、时变性等特点。针对这一特点,设计了一种模糊PID控制,使系统能达到较好的
控制效果。
关键词:温度控制;PID;模糊PID控制;电加热炉
中图分类号:TP273 文献标识码:A 文章编号:1009-2374(2013)27-0055-02
工业炉是指在工业生产中,利用燃料燃烧产生的热量或者将电能转化成热量对工件或者物
料进行加热的设备。按供热方式工业炉分为两大类:一是火焰炉,或称燃料炉,是用各种燃料
的燃烧热量在炉内对工件或者物料进行加热;二是电炉,是在炉内将电能转化为热能对工件或
物料进行加热。本文选用电炉作为控制模型。无论是火焰炉还是电炉,温度控制都是其性能好
坏的一个重要指标,是产品质量及安全生产的重要保证。电炉作为一种加热系统,有着大滞后
性、非线性、时变性等特点。
在工业运作过程中有一种最为常见的控制器就是PID控制器,由于其具有操作简单、算法
通俗、效果良好等优势,因而在工业领域应用广泛,比如化工行业、轻热工行业、治金机械行
业等。那么何谓PID控制?简而言之,就是对比例积分及微分控制的合称。但同时,因PID控
制超调量大,对加热系统这样大滞后、非线性、时变的系统,参数整定值只是具有一定的局域
性的优化,不能达到很好的全局控制效果。因此实际使用中在PID控制器中加入模糊控制,使
系统能达到较好的控制效果。
1 系统结构
如图1所示,将炉体划分为8个温控区。
图1 炉体温控区划分
该热处理工业炉为长8m、宽2m的单炉膛炉加热炉,因为长度较大,所以在控制上将其
分为8个温度控制区。每一个温度控制区设一个加热控制器、两个热电偶传感器、一组电阻丝
加热管。
2 系统组成
龙源期刊网 http://www.qikan.com.cn
系统由温度传感器、计算机、西门子PLC、电加热器、电热控制器和无纸记录仪等组成。
温度传感器:温度传感器是指能感受温度并转换成可用输出信号的传感器。
西门子PLC:从温度传感器采集到的信号连接到PLC中,通过PLC中的温度控制程序计
算输出4~20mA信号控制电加热控制器输出功率。
电加热器:系统加热部件。
电热控制器:通过输入的4~20mA信号,改变输出电加热器功率,从而达到控制温度变
化的效果。
系统按炉体结构,划分为8个温度控制区,每一个温度控制区设两组电加热器、两组温度
传感器。每组电热控制器和电加热器单独加热。
3 系统控制基本算法
采用R型热电偶测量温度是本控制器的测温途径,因为其具有很强的抗干扰能力,能够在
大范围内测温,且误差较少,能够比较准确地实施测温工作。具体方法即为,毫伏级电压在热
电偶的传递下发出带有温度的信号指示,温度变送器受到感应将之传至A/D转换器后进行数
量统计和转换,进而将转换的数字量发送到计算机里,同时比对给定的电压信号,得出偏差,
计算机通过相应的规律模式对偏差进行计算。最后,可控制硅将对运算结果进行识别、转换,
并在控制周期内的过零触发脉冲个数来实现控制温度之目的。
根据控制系统操作过程当前及以往传送的测量值、设定值之间的偏差确定当前控制输入是
PID控制的普遍方法;但预测控制是以预测模型为桥梁估算系统将来的输出量和设定值间的误
差,并以最先进、准确的策略的“滚动式”计算方法得出当前控制输入状况。可见,较之传统的
PID控制方法,预测技术具有明显优势,它的算法是以模型计算机控制算法为标准的,而且其
具有良好的跟踪功能,对数字模型也没有太高要求,能在最短时间内对滞后对象进行处理,使
模型误差可以降低到最小。
数字PID控制算法为:
一般情况,模糊规则是以操作者的实践经验和相对技能知识为建立基础的,通过kp、ki、
kd等系统活动对系统输出情况产生的影响得出相应调整规则。具体分析即:(1)在|e|在较大
的情况下,提高系统响应速度,提取过程产生的最大kp和最小的kd数量值,而ki则可以将之
调整至0,这样能够防止积分饱和。(2)当|e|和|ec|值达到中间位置时,应选取ki较小的数
值,kp选适中数值,这样可以有效地预防系统动行时形成数值过大的超调量,并保证系统的
龙源期刊网 http://www.qikan.com.cn
响应速度在正常范围内。(3)那么在|e|较小状态的情况下,提取的kd值应保持适中,具体应
根据|ec|的大小正比例调整,使系统在良好的状态下稳态运作。
4 调试方法与程序
本系统属于非线性系统控制。可以说,非线性系统存在于大多数工业过程中,有所区别的
是非线性存在程度的不同。如工程运作中,系统的非线性较弱时通常采用线性系统来近似,这
也是非常普遍的现象。而相对于系统的非线性环节较为严重时,用这种方法来处理就会产生较
大偏差,有时还会得出截然相反的结果。这是因为,与分析设计和系统理论法为完善的线性系
统相比,非线性系统还存在相当差距。虽然,近些年对于非线性系统的研究取得了一定的成
果,但其在理论和实践上仍有待进一步完善和
研究。
同时,本系统具有大时滞特性证,在电加热炉过程控制之中,存在着时间纯滞后和容量滞
后,这种时滞现象的存在非常不利于系统的稳定性,也将会产生很大的阻碍,系统调节作用如
不能及时发挥作用会使动态品质下降,甚至有可能出现发散振荡。所以,系统控制最难的部分
之一便是时滞对象,这已取得行业共认。自20世纪中期以来,基于模型的处理法和无模型处
理法都已出现在时滞控制领域,其中模型控制法有Smith预估控制法、最优控制法以及滑模变
结构控制等等。由于时滞系统模型具有不确定性,很容易受不良因素干扰,这种情况下非参数
模型处理法效果就更为有效和准确了,全现而多层次的智能控制方法及通过不同途径使之相结
合运作是未来时滞系统研究开发的主攻目标,这也是解决工业大时滞过程最理想和有效的途
径。
系统运行调试时,PLC采集到的误差与误差变化率输入参数信号,借助限幅量对之进行处
理相对应的模糊论域中的参数值,提取模糊控制表中参数量,通过计算得出Δkp、Δki、Δkd
值,系统同时对该组数值进行修正,并与kpc、kic、kdc相加而得出PID调节器所对应的相应
参数值,最后运用PID控制计算方法输出控制量。
5 结语
总之,采用PID控制器控制时效由于技术方法过于单一使得效果偏差较大,与常规PID控
制相对比,模糊论域控制因与系统相适应,在控制过程中不会有太大波动,超调理非常小,使
系统的稳定性得到保持,减小了过渡时间,鲁棒性得到加强,其性能远远优胜于常规PID
控制。
参考文献
龙源期刊网 http://www.qikan.com.cn
[1] 黄峰,汪岳峰,顾军,周冰,等.模糊参数自整定PID控制器的设计与仿真研究[J].光学
精密工程,2004,12(2).
[2] 张春,江明,陈其工.PID参数模糊自整定控制器的设计与研究[J].机电工程,2006,23
(9):19-2l.
[3] 南新元,陈志军,程其江.基于模糊PID控制的电锅炉温度过程控制系统[J].自动化仪
表,2008,29(5).
[4] 牟永欣.基于最优模糊PID温度控制方法研究[J].计算机仿真,2009,26(5).
[5] 张磊.最优模糊推理方法及其在智能控制中的应用[D].北京航空航天大学,2005.
作者简介:李天婧(1985—),女,天津人,天津工业自动化仪表研究所有限公司助理工
程师,研究方向:自动化控制技术与应用。