少齿差行星齿轮传动的设计计算与计算机辅 助设计
少齿差行星齿轮减速器计算说明书一
设计计算说明书在少齿差内啮合传动中,由于内齿轮和外齿轮的齿数差少,在切削和装配时会产生种种干涉,以致造成产品的报废。
因此,在设计减速器内齿轮副参数的时候,需要对一些参数进行合理的限制,以保证内啮合传动的强度和正确的啮合。
同时要对一些主要零件进行强度校核计算。
2.1 减速器结构型式的确定选用卧式电机直接驱动,因传动比53.153=总i ,传动i =153.53>100时,少齿差行星齿轮减速器有两种设计方案可供选择。
第一种是采用二级或多级的N 型少齿差行星齿轮减速器;第二种是采用内齿轮输出的NN 型少齿差行星齿轮减速器。
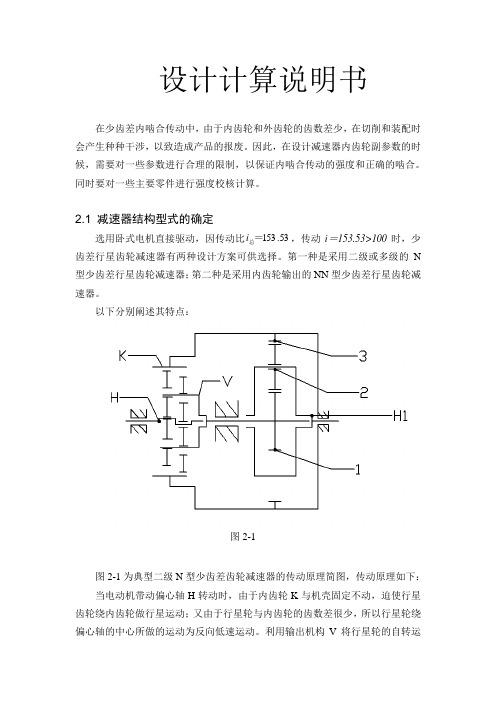
以下分别阐述其特点:图2-1图2-1为典型二级N 型少齿差齿轮减速器的传动原理简图,传动原理如下: 当电动机带动偏心轴H 转动时,由于内齿轮K 与机壳固定不动,迫使行星齿轮绕内齿轮做行星运动;又由于行星轮与内齿轮的齿数差很少,所以行星轮绕偏心轴的中心所做的运动为反向低速运动。
利用输出机构V 将行星轮的自转运动传递给输出轴,达到减速目的。
减速后的动力通过输出轴传递给中心轮1,而行星轮2绕中心轮1和3做行星反向低速运动,从而达到第二次减速。
此类减速器的优点是:2K-H(负号机构)这种传动机构制造方便、轴向尺寸小, K-H-V 型的机构效率较高,承载能力大,两者串联可实现大的传动比。
缺点是:因转速很高,行星轮将产生很大的离心力作用于轴承上,此机构设计计算复杂,销孔精度要求高,制造成本高,转臂轴承载荷大。
图1-3为典型的内齿轮输出的NN 型少齿差行星齿轮减速器,这种结构的减速器优点是:内齿轮输出的N 型少齿差行星减速器的结构简单,用齿轮传力,无需加工精度较高的传输机构;零件少,容易制造,成本低于上种型式;可实现很大或极大的传动比。
缺点是:传动比越大则效率也越低,为了减少振动需添加配重。
基于经济性方面因素考虑,采用第二种方案作为本次课题的设计方案。
2.2 确定齿数差和齿轮的齿数由《渐开线少齿差行星传动》表4-17可知,如齿数差增大,减速器的径向尺寸虽增大一些,但转臂轴承上的载荷可降低很多;并且由于齿轮直径的增大,从而可使轴承的寿命得到显著提高;此外,对减速器的效率、散热条件等也有了一定的改善。
NN型少齿差行星齿轮传动啮合冲击分析及修形设计

NN型少齿差行星齿轮传动啮合冲击分析及修形设计刘文吉;宋朝省;洪英【摘要】In view of multi-tooth meshing of planetary gear drive with small tooth number difference,a finite element analysis model was built and each node's contact stress,status,sliding distance,etc.,in the whole meshing process were obtained.The meshing impact's influence on scraping tooth top was analyzed.By profile modification,meshing status improved and meshing impact lightened,which is of instructive significance for designing gear drive with small tooth number difference.%针对少齿差行星齿轮传动时的多齿啮合效应,采用有限元法建立了渐开线少齿差多齿啮合模型,分析了动态轮齿的接触特性分析,得到了完整啮合周期内齿面接触应力、齿面印痕、齿面滑动位移等啮合特性参数,分析了啮入、啮出冲击对齿顶刮行的影响。
采用长修形法对少齿差行星传动的齿轮进行齿廓修形,使轮齿啮合状况得到了改善,明显减小了啮合冲击对齿顶刮行的影响,研究结果对指导少齿差行星齿轮传动设计具有重要意义。
【期刊名称】《中国机械工程》【年(卷),期】2012(023)004【总页数】5页(P425-429)【关键词】少齿差行星传动;多齿啮合;动态接触;齿廓修形【作者】刘文吉;宋朝省;洪英【作者单位】天津工业大学,天津300160;重庆大学机械传动国家重点实验室,重庆400030;天津工业大学,天津300160【正文语种】中文【中图分类】TH132.40 引言在齿轮工作过程中,由轮齿受载弹性变形、热变形、加工误差等引起的齿轮啮合冲击以及由此产生的齿顶刮行,使得齿面润滑状态发生改变,破坏润滑油膜,并使齿轮温度升高,甚至胶合失效。
关于少齿差行星齿轮传动设计的新思路

( )传 动 比 范 围 大 , 级 传 动 比 为 1 2 单 0~10 0 0
传 动相 比具有 承载能力大 、 积小 、 体 效率高 、 总质量 以上 。 轻 、 动 比大 、 传 噪声 小 、 可靠 性 高 、 寿命 长 、 于 维 修 便 () 3 结构 形 式多 , 用范 围广 。 由于其 输人 轴 与 应 等优 点 , 同时 还 可 以提 高其 承 载能力 。渐 开线 少齿 差 输 出轴 可在 同一轴 线 上 , 也可 以不 在 同一 轴 线上 , 所 行星齿轮传动 以其适用于一切功率、速度范 围和一 以能适 应各 种机 械 的需要 。 切工作条件, 到了世界各 国的广泛关 注, 受 成为世 界 () 4 结构 紧凑 、 积小 、 体 总质 量轻 。 由于 采用 内啮 各 国在机械传动方面的重点研究方向之一。但 由于 合 行 星传 动 , 以结 构紧凑 。 所 其计算过程复杂 , 目前还不能广泛被应用。本课题开 () 5 效率高。当传动 比为 1 ~ 0 时 , 0 20 效率提高 发 了一个计算过程 , 对于解决此问题十分有效 , 实 了8 且 O% 一 4%。效率 随 着传 动 比的增加 而 降低 。 9 际应 用 效果 良好 。 () 6 运转平稳、 噪音小、 承载能力大。 由于是 内啮 合传动 , 啮合齿轮一为凹齿 , 两 另一为 凸齿 , 两者 的 曲率中心在同一方向 , 曲率半径又接近相 等 , 因此接 1 课题 开发背景及 国内外研究现状 触 面积 大 , 齿 轮 的接 触强 度 大 为提 高 ; 因采用 断 使 又 11 课题 开发 背 景 . 齿制 , 齿 的弯 曲强度 也提 高 了。 轮 本课 题 开 发是 与某 阀 门制 造 商进 行 合作 的 。在 此外 , 在少齿差传动时 , 不是一对轮齿啮合 , 而是 使 用 原 设 计理 论 基 础上 ,该 企业 生产 出 的齿 轮 啮 合 3~9对 轮齿 同时 接触 受 力 , 以运 转 平 稳 、 所 噪音 小 , 极 差 , 常 由工 人凭 经 验进 行 打磨 , 全破 坏 了齿 轮 并且在 相 同的模数 情况 下 , 传递 力矩 比普 通 圆柱 齿 通 完 其 基于 以上特 点 , 到机 器人 的关 节 、 到 小 大 的渐开线曲面 , 结果在运行 中的振动和噪声都很 大, 轮减速 器大 。 以及 从要 求不 高 的农 用 、 品机 械 , 食 到 而且 传动 不稳 。因此 , 本课 题将 MA 1B和辅 助制 造 冶金矿 山机械 , TA 软件结合 , 开发新 的制造过程 , 发挥出该类机械机构 要求较高的印刷和国防工业都有应用实例 。 应 有 的优 势和 特点 。 13 国 内外研 究现 状 . ・ 12 少 齿差 行星 齿轮 传 动的特 点 . 当内啮合的两渐开线齿轮齿数差很小时 ,极 易 少齿差行星齿轮传动具有以下优点 : 产生各种干涉 ,因此在设计 过程 中选择齿轮几何参 () 1 加工方便 、 制造成本较低。渐开线少齿差传 数 的技术 十 分复 杂 。早 在 14 9 9年 , 苏 联 学 着 就从 前 动的特点是用普通 的渐开线齿轮刀具和齿轮机床就 理论上解决了实现一齿差传 动的几何计算问题 。但 可以加工齿轮 , 不需要特殊的刀具和专用设备 , 材料 直到 16 年代 以后 , 90 渐开线少齿差传动才得到迅速
少齿差行星齿轮传动原理

少齿差行星齿轮传动原理1.1 少齿差行星齿轮传动原理少齿差行星齿轮传动是行星齿轮传动中的一种。
由一个外齿轮与一个内齿轮组成一对内啮合齿轮副(它采用的是渐开线齿形,内外齿轮的齿数相差很小,简称为少齿差传动。
一般所讲的少齿差行星齿轮传动是专指渐开线少齿差行星齿轮传动而言的。
渐开线少齿差行星齿轮传动以其适用于一切功率、速度范围和一切T 作条件,受到了世界各国的广泛关注(成为世界各国在机械传动方面的重点研究方向之一。
1.1 2少齿差传动1.2 行星齿轮传动是动轴齿轮传动的一种主要方式,其最基本的形式是2K—H 型(即两个中心轮 a,b和个转臂 H),如图 l所示,传动比为 iaH=1+Zh/Zn.它演变出两种典型的少齿差行星齿轮传动形式 (如图 2所示:K—H—V行星齿轮传动如图2(a)所示 (基本构件为中心轮 b、转臂H和构件V,当中心轮 b固定,转臂H主动,构件V从动时,传动比为iHg= - Zg/(Zb-Zg).。
把构件V 固定(转臂H主动,中心轮 b输出(如图2(b)所示,其传动比iHb=Zb/(Zb-Zg)。
为少齿差行星齿轮传动机构实质是一个由平面四连杆机构和内啮合齿轮副组成的齿轮连杆机构。
通过对不同构件作不同限制,可以设计出多种少齿差行星齿轮传动结构形式。
1.1.3 少齿差行星齿轮传动的特点少齿差行星齿轮传动具有以下优点:(I)加工方便、制造成本较低渐开线少齿差传动的特点是用普通的渐开线齿轮刀具和齿轮机床就可以加工齿轮,不需要特殊的刀具与专用设备,材料也可采用普通齿轮材料料。
(2)传动比范围大,单级传动比为 10,1000以上。
(3)结构形式多样,应用范围广,由于其输入轴与输出轴可在同一轴线上,也可以不在同一轴线上,所以能适应各种机械的需要。
(4) 结构紧凑、体积小、重量轻,由于采用内啮合行星传动,所以结构紧凑;当传动比相等时,与同功率的普通圆柱齿轮减速器相比,体积和重量均可减少1/3,2,3。
渐开线少齿差行星传动的多目标优化设计
2 少齿差行 星传动系统 的优 化设计
21 设 计 变量 .
在 行 星 轮 和 内 齿 轮 齿 数 、 模 数 确 定 的 情 况
收稿 日期 :2 1-1-1 01 0 0 作者简介:林 尚飞 (9 8 1 8 一) ,男 ,浙江金华 人 , 硕士研 究生,研究方 向为机 械设计及理论 。 f2 第 3卷 3J 4 第5 期 2 1 —0 ( ) 0 2 5上
比较 优化 设 计 与常规 设 计 的结 果 可知 :
1 )优 化 后 的渐 开 线 少齿 差行 星 齿 轮 采 用 非 标 准齿 形 角 ,正变 位 ,超 短齿 ,并 且 是 正传 动 。 2 内外 齿轮 均采 用 了较 大 的正 变 位 ,齿 根厚 )
方 向
和 步长 因子 a , 使 下 一 个 迭 代 点
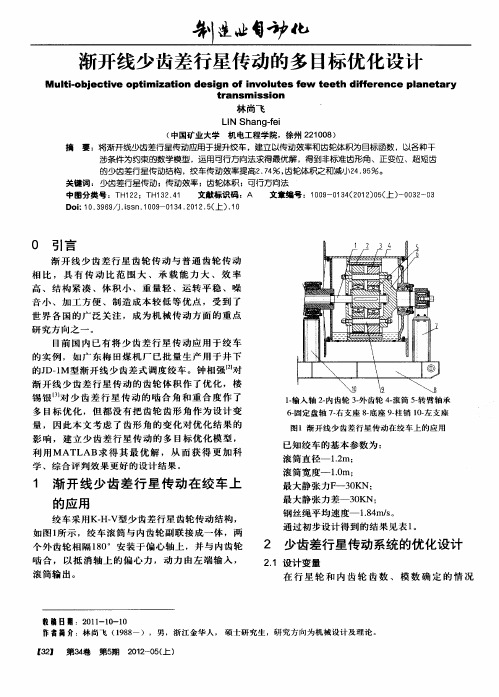
1输 入 轴 2内 齿 轮 3外 齿 轮 4滚 筒 5转 臂 轴 承 一 一 一 一 一 6固 定 盘 轴 7右 支座 8底 座 9柱 销 l一 支 座 一 . 一 一 0左 图 1 渐 开 线 少 齿 差 行 星 传 动 在 绞 车 上 的 应 用
多 目标 优 化 ,但 都 没 有 把 齿 轮 齿 形 角 作 为 设 计 变
l
匐 化
渐开 线少 齿差行星传 动的 多 目标优化设 计
Muli b e tv p i ia i nd sgno v u e e t e h dfe e c ln t r t- j c ie o tm z to e i fi olt sf w e t i r n e pa e a y o n f
的 实 例 ,如 广 东 梅 田煤 机 厂 已批 量 生 产 用 于 井 下 的J I 型渐 开 线 少 齿 差式 调 度 绞 车 。钟 相 副 D—M 对 渐 开 线 少齿 差 行 星 传 动 的齿 轮 体 积 作 了 优 化 ,楼 锡 银 对 少 齿 差 行 星 传 动 的 啮 合 角 和 重 合 度 作 了
齿轮的计算机辅助设计
计算机控制技术大作业目录计算机控制技术大作业 0程序一说明:根据齿轮运行条件得到齿轮的基本参数。
(1)程序一代码 (1)程序一运行结果 (5)程序一.dat文件示意 (5)程序二说明:根据齿轮的基本参数生成命令组文件,来达到参数化自动绘图的目的 (5)程序二代码 (5)程序二运行结果 (8)gear.scr文件内容 (8)其他说明 (9)绘图结果 (10)程序一说明:根据齿轮运行条件得到齿轮的基本参数。
基本条件包含功率p,转速v,传动比i,是否热处理等。
齿轮的基本参数包含模数m,齿数z,齿宽b,分度圆压力角,内径d0,键槽高度h,键槽宽度e,其中分度圆压力角默认为20度。
数据文件.dat文件中包含全部数据,这些数据已被计算好保存到数据文件中,可以根据实际进行相应的修改,数据的数量也可进行修改,这里为了演示程序,写入了若干数据。
不同于常见的读取文件代码,我改进了读取文件的模型,使其不仅可以对数据类型进行进行读写操作,还可以对字符型进行读写操作,可以增加数据的数量,而不必改写代码。
数据文件中每一行代表的是一个齿轮的参数,而不是同一个参数的全部,从左到右依次是功率p,转速v,传动比i,是否热处理,齿轮模数m,齿数z,齿宽b,内径d0,键槽高度h,键槽宽度e。
程序一代码1.// 齿轮选择.cpp2.#include<iostream>3.#include<cstdio>4.#include<cmath>5.#include<string.h>ing namespace std;7.8.const int Max=10;//字符串最大长度9.class Gear10.{11.public:12.char number[Max]; //序号13.char name[Max]; //名称14.double power; //功率15.double speed; //转速16.double ratio; //传动比17.double rechuli;//是否热处理 1为是,0为否18.double moshu;//模数19.double chishu; //齿数20.double chikuan;//齿宽21.double neijing;//内径22.double jiancao_h;//键槽高23.double jiancao_e;//键槽宽24.};25.26.class data_27.{28.public:29.char a[Max][Max];30.char b[Max][Max];31.};32.33.float chars2float(char str[])34.{35.float number0=0,number1=0;36.int flag=0;37.for(int i=0;i<Max;i++)38. {39.if(str[i]=='.')40. flag=1;41.else if(str[i]>='0'&&str[i]<='9')42. {43.if(flag==0)44. {45. number0=Max*number0+str[i]-48;46. }47.else48. {49. number1=number1+pow(0.1,flag)*(str[i]-48);50. flag++;51. }52. }53.else break;54. }55.return number0+number1;56.}57.int main() //系统集成58.{59. Gear canshu[Max]={0};60. data_ here[Max]={0};61.FILE *fp;62. fp=fopen("齿轮数据0.dat","r");63.int j=0,jj=0,n=0,nn=0;64.int m=0;65.int row[Max]={0},column[Max][Max]={0};66.for(m=0;m<Max;m++)//将.dat文件中的数据读入数组中67.{68. n=0;nn=0;69.for(j=0;j<Max;j++)70. {71.for(jj=0;jj<Max;jj++)72. {73. fscanf(fp,"%c",&(here[m].a[j][jj]));74.if(here[m].a[j][jj]==',')75. {76. column[m][n]=nn;77. n++;78. nn=0;79.break;80. }81.else if(here[m].a[j][jj]==';')82. {83. column[m][n]=nn;84. row[m]=n+1;85. n=0;86. nn=0;87. j=Max;88. jj=Max;89.break;90. }91.else if(here[m].a[j][jj]=='!')92. {93. column[m][n]=nn;94. row[m]=n+1;95. m=Max;96. j=Max;97.break;98. }99.else if(here[m].a[j][jj]=='\n')//还包含一个换行符'\n' 100. {101.//cout<<endl;102. }103.else104. {105. here[m].b[n][nn]=here[m].a[j][jj]; 106. nn++;107. }108. }109. }110.}111.for(m=0;m<Max;m++)//讲数组类型转换成实数类型112.{113.for(j=0;j<row[m];j++)114. {115. chars2float(here[m].b[j]);116.//cout<<chars2float(here[m].b[j])<<endl;117. } //cout<<endl<<endl;118.}119.for(m=0;m<Max;m++)120.{121. canshu[m].power=chars2float(here[m].b[0]);122. canshu[m].speed=chars2float(here[m].b[1]);123. canshu[m].ratio=chars2float(here[m].b[2]);124. canshu[m].rechuli=chars2float(here[m].b[3]);125. canshu[m].moshu=chars2float(here[m].b[4]);126. canshu[m].chishu=chars2float(here[m].b[5]);127. canshu[m].chikuan=chars2float(here[m].b[6]);128. canshu[m].neijing=chars2float(here[m].b[7]);129. canshu[m].jiancao_h=chars2float(here[m].b[8]);130. canshu[m].jiancao_e=chars2float(here[m].b[9]);131.}132.double power0=0; //功率133.double speed0=0; //转速134.double ratio0=0; //传动比135.double rechuli0=0;//热处理136. cout<<"请依次输入功率,转速,传动比:";137. cin>>power0>>speed0>>ratio0;138. cout<<"是否热处理?是输入1,否输入0:";139. cin>>rechuli0;140.for(m=0;m<Max;m++)141.{142.if(power0==canshu[m].power)143.if(speed0==canshu[m].speed)144.if(ratio0==canshu[m].ratio)145.if(rechuli0==canshu[m].rechuli)146. {147. cout<<"模数m="<<canshu[m].moshu<<endl;148. cout<<"齿数z="<<canshu[m].chishu<<endl;149. cout<<"齿宽b="<<canshu[m].chikuan<<endl;150. cout<<"内径d0="<<canshu[m].neijing<<endl;151. cout<<"键槽高h="<<canshu[m].jiancao_h<<endl;152. cout<<"键槽宽e="<<canshu[m].jiancao_e<<endl; 153. m=Max;154.break;155. }156.else ;157.else ;158.else ;159.else if(m==Max-1) cout<<"文件中不存在!";160.}161.return 0;162.}程序一运行结果程序一.dat文件示意各数据的含义上诉内容已说明,从左到右依次是功率p,转速v,传动比i,是否热处理,齿轮模数m,齿数z,齿宽b,内径d0,键槽高度h,键槽宽度e。
少齿差行星减速器设计说明书

少齿差行星减速器设计说明书1 导言1.1 设计目的减速器是指原动机与工作机之间独立的闭式传动装置,为各行业成套装备及生产线配套的大功率和中小功率变速箱。
行星齿轮减速器是齿轮减速器中应用较多的一种,它具有许多优点,在各种车辆、机械设备和其它传动系中得到广泛使用。
随着近代工业技术的高速发展,对行星齿轮传动的承载能力、可靠性、效率、圆周速度、体积及质量等技术和经济指标提出了愈来愈高的要求。
与此同时,优化其结构设计也被提到十分重要的地位上。
行星齿轮传动较普通齿轮传动具有许多独特的优点,它不仅用于民用机械上,而且广泛用于军事机械传动装置,其主要特点如下:结构紧凑,承载能力大;只要适当选择机构的形式,便可以用较少的齿轮获得很大的传动比,甚至其传动比能达到好几千倍,虽然传动比很大但是仍然结构紧凑、重量轻;传动效率较高,其值可达0.8,0.9以上;由于行星轮均匀分布于中心轮的四周,因而惯性力平衡,机构运[1]转平稳,抗冲击和抗震动能力强。
1.2 减速器的生产现状当今世界各国减速器及齿轮技术发展总趋势是向六高、二低、二化方面发展。
六高就是指高承载能力、高齿面硬度、高精度、高速度、高可靠性和高传动效率;二低,是指低噪声和低成本;二化是标准化和多样化。
国内的减速箱将逐渐淘汰软齿面,向硬齿面(50,60HRC)、高精度(4级)、高可靠度软启动、运行监控、运行状态记录、低噪声、高的功率与体积比和高的功率与重量比的方向发展。
中小功率变速箱为适应机电一体化成套装备自动控制、自动1调速、多种控制与通讯功能的接口需要,产品的结构与外型在相应改变。
矢量变频代替直流伺服驱动,已成为近年中小功率变速箱产品(如摆轮针轮传动、谐波齿轮传动等)追求的目标。
近十几年来,计算机技术、信息技术、自动化技术机械制造中的广泛应用,改变了制造业的传统观念和产品组织方式。
一些先进的齿轮生产企业已经采用精益产、敏捷制造、智能制造等先进技术,形成了高精度、高效率的智能化齿轮生产线和计[2]算机网络化管理。
少齿差行星齿轮传动分析及应用
少齿差行星齿轮传动分析及应用摘要:少齿差行星齿轮传动由行星齿轮传动演变而来,由于行星齿轮副内外齿轮的齿数相差很少,因此简称少齿差传动,通常指渐开线少齿差行星齿轮传动。
少齿差轮系按传动形式可分为N型和NN型,其输出机构又设计成多种形式,文章分析轮系传动比的计算方法,对其典型结构的效率计算做了阐述,少齿差传动以其大传动比、小体积、轻重量、传动效率高等优点,在化工、轻工、冶金等机械设备中获得广泛应用。
关键词:少齿差传动;传动比;传动效率Abstract: the less tooth differenced planetary gear transmission of planetary gear transmission by evolved, by the planet gear pair of internal and external gear are very few number, so fewer tooth difference as transmission, usually refers to the involute less tooth differenced planetary gear transmission. Less tooth was sent by the transmission forms can be divided into N type and NN type, its export agencies and design into a variety of forms, this paper analyzes the calculation method of gear transmission ratio, the typical structure of the calculation efficiency paper and less tooth difference with its large transmission transmission, small volume, light weight, high transmission efficiency advantage, in the chemical industry, the light industry, metallurgy, and other machinery and equipment were widely available.Keywords: less tooth difference transmission; Transmission ratio; Transmission efficiency中图分类号:U463.212+.42 文献标识码:A文章编号:少齿差行星齿轮传动是由行星齿轮传动演变而来,是行星齿轮传动中的一种特殊的轮系。