NN型渐开线少齿差行星传动齿轮副的设计
关于少齿差行星齿轮传动设计的新思路

关于少齿差行星齿轮传动设计的新思路
张晶
【期刊名称】《装备制造技术》
【年(卷),期】2012(000)010
【摘要】渐开线少齿差行星齿轮是目前广泛应用的一种传动机构.由于人工计算其过程繁琐且误差较大,实际生产应用很不理想,因此本文针对其复杂的设计计算过程编写了一套程序.此程序采用牛顿迭代法作为基本数学原理,一改过去人工计算的复杂与繁琐,同时解决了以往存在的较大误差问题.此过程利用了MATlAB程序的自带模块,程序简明易用.对于不懂编程的人员也可迅速读懂程序,大大方便了工程人员的使用与操作.在程序生成参数后,采用辅助制造软件可以进行模拟制造.由于有效数字比较长,精度大幅提高,使得成品齿轮啮合明显好于以往,传动效率符合要求,有效降低了生产成本.经证实,该方法的确有效且高效解决以往生产中出现的问题.
【总页数】2页(P257-258)
【作者】张晶
【作者单位】天津机电职业技术学院,天津300131
【正文语种】中文
【中图分类】TH132.4
【相关文献】
1.活齿少齿差行星齿轮传动的功率流分析 [J], 李明山;王永信
2.少齿差内齿行星齿轮传动的研究现状 [J], 张锁怀;张江峰;李磊
3.少齿差行星齿轮传动多齿弹性啮合效应的研究 [J], 朱超强;王家序;张林川;朱双盛
4.少齿差行星齿轮传动实际接触齿数及载荷分配的研究 [J], 朱才朝;黄健;唐倩
5.渐开线少齿差传动设计参数的选择 [J], 冯晓宁;李宗浩
因版权原因,仅展示原文概要,查看原文内容请购买。
NGWN(III)型行星轮减速器设计
1 前言NGWN(III)型行星轮减速器设计1 前言随着现代化工业的发展,机械化和自动化水平不断地提高,各工业部门需要大量的减速器,并要求减速器的体积小、重量轻、传动比大、效率高、承载能力大、运转可靠和寿命长等。
而行星齿轮传动具有减速比大、传动效率高、结构小巧、承载能力强等优点,在许多情况下可代替二级、三级的普通齿轮减速器和涡轮减速器,因此行星轮减速器被广泛应用于各个方面。
行星传动不仅适用于高转速、大功率,而且在低速大转矩的传动装置上也已获得广泛的应用,所以目前行星传动技术已成为世界各国机械传动重点之一。
目前国外的减速器,以德国、丹麦和日本处于领先地位,在结构优化、传动性能,传动功率、转矩和速度等方面均处于领先地位,并出现一些新型的行星传动技术,如封闭行星齿轮传动、行星齿轮变速传动和微型行星齿轮传动等早已在现代化的机械传动设备中获得了成功的应用。
行星轮减速装置经过一个多世纪的发展设计理论及制造技术有了很大的进步,而且与新技术革命的发展紧密结合。
当今世界行星轮减速装置总的发展趋势是向着大功率、大传动比、小体积、高机械效率、高的承载能力以及利用寿命长的目标发展,而且其重量更轻,噪声更低,效率更高,可靠性也更高。
目前世界各国由工业化信息化时代正在进入知识化时代,行星轮在设计上的研究也趋于完善,制造技术也不断改进。
行星齿轮传动类型很多,行星齿轮传动根据基本够件的组成情况可分为:2K—H、3K、及K—H—V三种。
若按各对齿轮的啮合方式,又可分为:NGW型、NN型、WW型、WGW 型、NGWN型和N型等。
我所研究的NGWN(III)行星齿轮属于3Z型行星齿轮传动的一种。
本文主要对NGWN(III)齿轮减速器设计方法进行了探讨,主要内容包括齿轮传动比的分配计算,主要零部件参数设计,标准零部件的选用,以及减速器中零件三维模型的设计。
NGWN(III)行星轮减速器的设计2 选题背景2.1 题目来源生产实际2.2 研究的目的与意义由于行星轮齿轮减速器具有质量小、体积小、传动比大以及效率高等优点,因此行星轮减速器被广泛应用于工程机械、矿山机械、冶金机械、起重运输机械、飞机、轮船等各个方面。
少齿差行星齿轮减速器的设计
摘要对少齿差行星齿轮减速器国内外的发展现状、优缺点、结构型式和其传动原理进行了一定的阐述。
在设计过程当中,对内啮合传动产生的各种干涉进行了详细验算;从如何提高转臂轴承的寿命为出发点,来计算选择减速器齿轮的模数,进行少齿差内齿轮副的设计计算,最终合理设计减速器的整体结构。
关键词:少齿差行星传动;行星齿轮减速器;内齿轮副AbstractHaving expounded the planetary gear reducer of a few-tooth differenceabout its development of the status quo at home and abroad, the advantages and disadvantages, structural type and principle of its transmission. Among the process of designing, having checked detailedly about the interference which generated by internal mesh transmission. From how to improve the life of bearing arms to the starting point, choosing and calculating the modulus of the gear reducer for designing the internal gear pair of a few-tooth difference and the final overall structure of the reducer.Key words:Small tooth number difference planet transmission; Planetary gear reducer; Annular gear目 录摘要 ................................................................................................................................. Ⅰ ABSTRACT . (Ⅱ)1 绪论 (1)1.1 概述 (1)1.2 少齿差行星减速器的结构型式 (2)1.2.1 N 型少齿差行星减速器 (2)1.2.2 NN 型少齿差行星减速器 (3)1.3 国内外研究状况 (5)1.4 发展趋势 (6)1.5 本课题的意义与设计任务 (7)1.5.1 本课题的设计意义 (7)1.5.2 设计任务 .................................................................................................... 7 2 减速器结构型式的确定 .. (8)2.1 减速器结构型式的确定 ......................................................................................... 8 3 减速器的内齿和外齿轮参数的确定 .. (10)3.1齿轮齿数确定 (10)3.2主要零件的材质和齿轮精度 (10)3.3 啮合角、变位系数确定 (10)3.3.1 确定啮合角和外齿轮变位系数c x 及内齿轮变位系数b x (10)3.3.2 计算四个导数 (11)3.3.3 计算(1)(1),c bx x 及相应的'α .......................................................................... 12 4 几何尺寸计算及主要限制条件检查 .. (14)4.1 切削内齿轮插齿刀的选用 (14)4.1.1 径向切齿干涉 (14)4.1.2 插齿啮合角'0b α .........................................................................................15 4.2 切削内齿轮的其他限制条件检查 (15)4.2.1 展成顶切干涉 (15)4.2.2 齿顶必须式渐开线 (15)4.3 切削外齿轮的限制条件检查 (16)4.4 内齿轮其他限制条件检查 (16)4.4.1 渐开线干涉 (16)4.4.2 外齿轮齿顶与内齿轮啮合线过渡曲线干涉 (16)4.4.3 内齿轮齿顶与外齿轮齿根过渡曲线干涉 (16)4.4.4 顶隙检查 (17)5 强度计算 (19)5.1 转臂轴承寿命计算 (19)5.2 销轴受力 (19)5.3 销轴的弯曲应力 (19)6 轴的设计 (20)6.1 轴的材料选择 (20)6.2 轴的机构设计 (21)6.2.1 输入偏心轴的结构设计 (21)6.2.2 输出轴的机构设计 (22)6.3 强度计算 (23)6.3.1 输入轴上受力分析 (23)6.3.2 输入轴支反力分析 (23)6.3.3 轴的强度校核 (24)7 浮动盘式输出机构设计及强度计算 (26)7.1 机构形式 (26)7.2几何尺寸的确定 (26)7.3 销轴与浮动盘平面的接触应力 (26)8 效率计算 (27)8.1 啮合效率 (27)8.1.1 一对内啮合齿轮的效率 (27)8.1.2 行星结构的啮合效率 (27)8.2 输出机构的效率 (27)8.2.1 用浮动盘输出机构 (27)8.2.2 行星机构 (28)8.3 转臂轴承效率 (28)8.4 总效率 (28)9 箱体与附件的设计 (29)9.1 减速器箱体的基本知识简介 (29)9.2 减速器箱体材料和尺寸的确定 (31)9.3 减速器附件的设计 (31)9.3.1 配重的设计 (31)9.3.2减速器附件设计 (32)10 工作条件 (34)总结 (35)参考文献 (36)致谢 (37)1 绪论1.1 概述随着现代工业的高速发展,机械化和自动化水平的不断提高,各工业部门需要大量的减速器,并要求减速器体积小,重量轻,传动比范围大,效率高,承载能力大,运转可靠以及寿命长等。
关于少齿差行星齿轮传动设计的新思路

( )传 动 比 范 围 大 , 级 传 动 比 为 1 2 单 0~10 0 0
传 动相 比具有 承载能力大 、 积小 、 体 效率高 、 总质量 以上 。 轻 、 动 比大 、 传 噪声 小 、 可靠 性 高 、 寿命 长 、 于 维 修 便 () 3 结构 形 式多 , 用范 围广 。 由于其 输人 轴 与 应 等优 点 , 同时 还 可 以提 高其 承 载能力 。渐 开线 少齿 差 输 出轴 可在 同一轴 线 上 , 也可 以不 在 同一 轴 线上 , 所 行星齿轮传动 以其适用于一切功率、速度范 围和一 以能适 应各 种机 械 的需要 。 切工作条件, 到了世界各 国的广泛关 注, 受 成为世 界 () 4 结构 紧凑 、 积小 、 体 总质 量轻 。 由于 采用 内啮 各 国在机械传动方面的重点研究方向之一。但 由于 合 行 星传 动 , 以结 构紧凑 。 所 其计算过程复杂 , 目前还不能广泛被应用。本课题开 () 5 效率高。当传动 比为 1 ~ 0 时 , 0 20 效率提高 发 了一个计算过程 , 对于解决此问题十分有效 , 实 了8 且 O% 一 4%。效率 随 着传 动 比的增加 而 降低 。 9 际应 用 效果 良好 。 () 6 运转平稳、 噪音小、 承载能力大。 由于是 内啮 合传动 , 啮合齿轮一为凹齿 , 两 另一为 凸齿 , 两者 的 曲率中心在同一方向 , 曲率半径又接近相 等 , 因此接 1 课题 开发背景及 国内外研究现状 触 面积 大 , 齿 轮 的接 触强 度 大 为提 高 ; 因采用 断 使 又 11 课题 开发 背 景 . 齿制 , 齿 的弯 曲强度 也提 高 了。 轮 本课 题 开 发是 与某 阀 门制 造 商进 行 合作 的 。在 此外 , 在少齿差传动时 , 不是一对轮齿啮合 , 而是 使 用 原 设 计理 论 基 础上 ,该 企业 生产 出 的齿 轮 啮 合 3~9对 轮齿 同时 接触 受 力 , 以运 转 平 稳 、 所 噪音 小 , 极 差 , 常 由工 人凭 经 验进 行 打磨 , 全破 坏 了齿 轮 并且在 相 同的模数 情况 下 , 传递 力矩 比普 通 圆柱 齿 通 完 其 基于 以上特 点 , 到机 器人 的关 节 、 到 小 大 的渐开线曲面 , 结果在运行 中的振动和噪声都很 大, 轮减速 器大 。 以及 从要 求不 高 的农 用 、 品机 械 , 食 到 而且 传动 不稳 。因此 , 本课 题将 MA 1B和辅 助制 造 冶金矿 山机械 , TA 软件结合 , 开发新 的制造过程 , 发挥出该类机械机构 要求较高的印刷和国防工业都有应用实例 。 应 有 的优 势和 特点 。 13 国 内外研 究现 状 . ・ 12 少 齿差 行星 齿轮 传 动的特 点 . 当内啮合的两渐开线齿轮齿数差很小时 ,极 易 少齿差行星齿轮传动具有以下优点 : 产生各种干涉 ,因此在设计 过程 中选择齿轮几何参 () 1 加工方便 、 制造成本较低。渐开线少齿差传 数 的技术 十 分复 杂 。早 在 14 9 9年 , 苏 联 学 着 就从 前 动的特点是用普通 的渐开线齿轮刀具和齿轮机床就 理论上解决了实现一齿差传 动的几何计算问题 。但 可以加工齿轮 , 不需要特殊的刀具和专用设备 , 材料 直到 16 年代 以后 , 90 渐开线少齿差传动才得到迅速
少齿差行星齿轮传动原理

少齿差行星齿轮传动原理1.1 少齿差行星齿轮传动原理少齿差行星齿轮传动是行星齿轮传动中的一种。
由一个外齿轮与一个内齿轮组成一对内啮合齿轮副(它采用的是渐开线齿形,内外齿轮的齿数相差很小,简称为少齿差传动。
一般所讲的少齿差行星齿轮传动是专指渐开线少齿差行星齿轮传动而言的。
渐开线少齿差行星齿轮传动以其适用于一切功率、速度范围和一切T 作条件,受到了世界各国的广泛关注(成为世界各国在机械传动方面的重点研究方向之一。
1.1 2少齿差传动1.2 行星齿轮传动是动轴齿轮传动的一种主要方式,其最基本的形式是2K—H 型(即两个中心轮 a,b和个转臂 H),如图 l所示,传动比为 iaH=1+Zh/Zn.它演变出两种典型的少齿差行星齿轮传动形式 (如图 2所示:K—H—V行星齿轮传动如图2(a)所示 (基本构件为中心轮 b、转臂H和构件V,当中心轮 b固定,转臂H主动,构件V从动时,传动比为iHg= - Zg/(Zb-Zg).。
把构件V 固定(转臂H主动,中心轮 b输出(如图2(b)所示,其传动比iHb=Zb/(Zb-Zg)。
为少齿差行星齿轮传动机构实质是一个由平面四连杆机构和内啮合齿轮副组成的齿轮连杆机构。
通过对不同构件作不同限制,可以设计出多种少齿差行星齿轮传动结构形式。
1.1.3 少齿差行星齿轮传动的特点少齿差行星齿轮传动具有以下优点:(I)加工方便、制造成本较低渐开线少齿差传动的特点是用普通的渐开线齿轮刀具和齿轮机床就可以加工齿轮,不需要特殊的刀具与专用设备,材料也可采用普通齿轮材料料。
(2)传动比范围大,单级传动比为 10,1000以上。
(3)结构形式多样,应用范围广,由于其输入轴与输出轴可在同一轴线上,也可以不在同一轴线上,所以能适应各种机械的需要。
(4) 结构紧凑、体积小、重量轻,由于采用内啮合行星传动,所以结构紧凑;当传动比相等时,与同功率的普通圆柱齿轮减速器相比,体积和重量均可减少1/3,2,3。
少齿差行星齿轮减速器的设计本科毕业设计

本科毕业设计(论文)少齿差行星齿轮减速器的设计毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日指导教师评阅书评阅教师评阅书教研室(或答辩小组)及教学系意见摘要对少齿差行星齿轮减速器国内外的发展现状、优缺点、结构型式和其传动原理进行了一定的阐述。
在设计过程当中,对内啮合传动产生的各种干涉进行了详细验算;从如何提高转臂轴承的寿命为出发点,来计算选择减速器齿轮的模数,进行少齿差内齿轮副的设计计算,最终合理设计减速器的整体结构。
行星齿轮传动设计
行星齿轮传动设计引言行星齿轮传动是一种常见的机械装置,广泛应用于工业、汽车、航空航天等领域。
其特点是结构紧凑、传动比大、承载能力强等优点。
本文将介绍行星齿轮传动的基本原理和设计步骤。
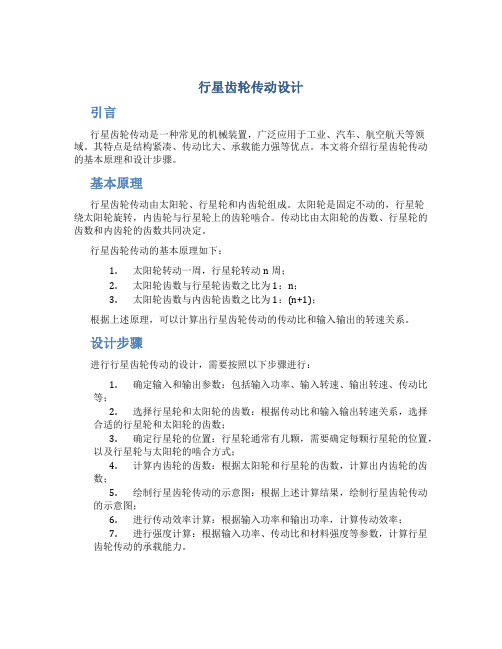
基本原理行星齿轮传动由太阳轮、行星轮和内齿轮组成。
太阳轮是固定不动的,行星轮绕太阳轮旋转,内齿轮与行星轮上的齿轮啮合。
传动比由太阳轮的齿数、行星轮的齿数和内齿轮的齿数共同决定。
行星齿轮传动的基本原理如下:1.太阳轮转动一周,行星轮转动n周;2.太阳轮齿数与行星轮齿数之比为1:n;3.太阳轮齿数与内齿轮齿数之比为1:(n+1);根据上述原理,可以计算出行星齿轮传动的传动比和输入输出的转速关系。
设计步骤进行行星齿轮传动的设计,需要按照以下步骤进行:1.确定输入和输出参数:包括输入功率、输入转速、输出转速、传动比等;2.选择行星轮和太阳轮的齿数:根据传动比和输入输出转速关系,选择合适的行星轮和太阳轮的齿数;3.确定行星轮的位置:行星轮通常有几颗,需要确定每颗行星轮的位置,以及行星轮与太阳轮的啮合方式;4.计算内齿轮的齿数:根据太阳轮和行星轮的齿数,计算出内齿轮的齿数;5.绘制行星齿轮传动的示意图:根据上述计算结果,绘制行星齿轮传动的示意图;6.进行传动效率计算:根据输入功率和输出功率,计算传动效率;7.进行强度计算:根据输入功率、传动比和材料强度等参数,计算行星齿轮传动的承载能力。
实例演示为了更好地理解行星齿轮传动的设计过程,以下是一个实例演示:假设输入功率为100W,输入转速为1000rpm,输出转速为500rpm,要求传动比为2:1。
1.根据输出转速和传动比,可以计算得到太阳轮的转速为250rpm;2.假设行星轮的齿数为30,太阳轮的齿数为60,可以得到行星轮的转速为500rpm;3.根据太阳轮和行星轮的齿数,可以计算出内齿轮的齿数为20;4.根据齿数的要求,确定行星轮位置为太阳轮外侧,并与太阳轮以外啮合城sk1;5.绘制行星齿轮传动的示意图如下:行星齿轮传动示意图行星齿轮传动示意图6.计算传动效率:根据输入功率和输出功率,可以计算传动效率为80%;7.强度计算:根据输入功率、传动比和材料强度等参数,可以计算行星齿轮传动的承载能力为xxx。
浅谈渐开线少齿差行星齿轮传动的特点及发展前景

图 E
图 F
图 3 轴销输 出机构和浮动盘式结构
而 浮动 盘 式 结 构 较 简 单 , 图 3的 F图 , 用 如 采
传动 , 但浮 动盘本 身加 工要 求较 高 , 且其工 作效 率 而
和承载 能力 还缺乏 测 试数据 。
一
传 递平行 轴运 动 的浮动盘 机构 作为输 出机 构 。它 比
而齿数 不 同的两个 内齿 轮副组 成 。其 结构 如 图 2的 C图所示 , 由两 个 中心 轮 ( 内齿 轮 ) 即 和一个 行 星架
啮合齿 轮 副 。H 是 输 入轴 , 是 输 出轴 。 当 电动机 V 带动偏 心轴 转动 时 , 行星 齿轮 与 内齿 轮啮合 , 由于 内 齿轮 2固定 不动 , 迫使双 联行 星轮既绕 内齿 轮公转 ,
・
2 ・ 4
a" 用 F
汽
车
21 第 1 0 1年 期
★ 设 计 ・ 验 ・ 究 ★ 试 研
又绕 自身 中心 自传 , 带动 内齿轮 4输 出运 动 , 而达 从 到传 动 的 目的 。有 时 , 型 行 星 传 动 也 可设 计 成 NN 外 齿轮输 出的结构 形式 , 图 2的 D 图 。 如
W
图A 图 1 N型 少 齿 差行 星齿 轮 传 动
图B
1 2 NN型 少齿 差行星 齿轮传 动 .
( 即偏心 轴 ) 成两级 行星 传动 。 由其 中的齿 轮 1 组 及
3为双联 外齿轮 , 1与 2 3与 4分别 为两对少 齿差 内 ,
N 型行 星齿 轮传 动 可 以实 现 大 传 动 比传 动 , N 是一种 典型 的行 星齿 轮 传 动形 式 , 般 由模 数 相 同 一
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
现代制造工程2007年第8期设备设计/诊断维修/再制造NN型渐开线少齿差行星传动齿轮副的设计 陶桂宝,李泽群(重庆大学机械工程学院,重庆400044)
摘要:对NN型渐开线少齿差行星齿轮减速器的传动原理、传动特点、齿轮副的主要干涉限制条件、设计参数的选择提出一些看法和认识。提出简明实用的设计计算方法,可简化设计工作,避免反复计算。关键词:行星传动;少齿差传动;内齿轮副中图分类号:TH16文献标识码:A文章编号:1671-3133 (2007) 08-0116--04
Designing of the gear pair for NN type of involute planetary gear transmission Tao Gui-bao,Li Ze-qun (Colege of Mechanical Engineering, Chongqing University, Chongqing 400044, CHN )Abstract: According to the designing of decelerate organization for electric executor-decelerate machine for NN type of involuteplanetary gear transmission, put forward some viewpoints and understanding put forward a simple and practical method for its de-sign calculation. This may simpl海the design process and avoid the repeated calculation.Key words: Planetary gear transmission; Smal tooth number difference transmission; Internal gear画r
0引言 少齿差行星齿轮传动是以齿数相差少的圆柱内齿轮副为传动元件的一种行星传动。其主要特点是:传动比范围大、体积小、质量轻、传动效率高(一般高于蜗杆传动)、承载能力大,加之制造、加工、维修方便,因而广泛应用于起重、运输、矿山、冶金、造船、建筑、农机、水利、轻工仪表、食品化工以及国防工业等部门。笔者在“基于少齿差传动的电动调节阀控制系统的研究与开发”项目中设计了NN型渐开线少齿差行星齿轮减速器,用于电动执行器的减速机构。现将NN型渐开线少齿差行星齿轮减速器齿轮副的设计方法介绍如下。1,外齿轮3与内齿轮4组成的内齿轮副为内齿轮副2。其结构简图如图1所示,由两个中心轮(即内齿轮)和一个行星架H(即偏心轴)组成两级行星传动。 当电动机带动偏心轴转动时,行星齿轮与内齿轮啮合,由于内齿轮4固定不动,迫使双联行星轮既绕内齿轮公转,又绕自身中心自转,带动内齿轮2输出运动。从而达到传动的目的。
2传动比及配齿计算 少齿差行星传动属动轴轮系,啮合过程中行星轮的中心作圆周运动。采用转化机构法计算传动比,可以求得机构传动比i"为:
i"=n 1ZIZ3ZZZ3一Z, Z4(1)24
-几2
-21传动原理
NN型少齿差行星齿轮传动可以实现大传动比传动,它是一种典型的行星齿轮传动形式,由两个内齿轮副组成。设外齿轮1与内齿轮2组成的内齿轮副为内齿轮副 116
1一图1 NN型行星机构简图式中:nH,n:分别为偏心轴H与内齿轮2的转速;ZZ3分别为双联行星轮两个外齿轮的齿数;Zz、乙分别为两个内齿轮的齿数。 NN型传动由两个内齿轮副组成,构成双内啮合行星齿轮传动。两个内齿轮副内、外齿轮的齿数差分别为ZZ一ZIA一Z3,实用中齿数差有两种取值情况,一种是两个内齿轮副的齿数差相同,即ZZ一Z,二Z,-
万方数据设备设计/诊断维修/再制造现代制造工程2007年第8期T'3的情况;另一种是两个齿轮副的齿数差不相同的情况,本课题所讨论的间题属于前者。设齿数差K二Z2一z;二Z,一T'3;错齿数J二Z3一Z,。则:线少齿差内齿轮副,主要限制条件是齿廓重叠干涉条件叹!:>0,重合度e,2 > 1,外齿轮齿顶与内齿轮齿根之顶隙q2 i O. 251/6,除非插齿刀选择极为不妥,否则上述结论总是成立的。文献【1]附录II中的大量封闭图均检验证明了这一点。因此设计时如何选择设计参数以满足上述3个(或2个)条件就成了渐开线少齿差内齿轮副设计计算的关键问题。
一几二z,+K
Z3=zi+J乙二Z3十K将式(2)代人式(1),可得: Z2 Z3ZZ Z3&M=ZZZ3 - Z, Z4“(T2一ZI) Z3一(Za一Z3)Z,
(Z,+K) (Z,+J) KJ(3)
由式(3)可知:K值越小,J的绝对值iii越小,Z,越大时,传动比im越大。但需注意,齿数差K越小,则减速器的啮合效率越低。如果取J为正值,即Z3>Z,,传动比im均为正值,此时输人轴与输出轴转向相同。反之J取负值时,由于齿数Z,一般远大于J的绝对值,因此传动比均为负值。所以设计时欲使传动比为正值,应取J>0,即几> Z,,反之欲使传动比为负值,应取J为负值,即Z, < Z, o 配齿计算时,设K.J为常数,由式(3)可以得到关于Z,的二元一次方程: 老+(K+J) Z,+KJ(1一in)=0 根据求根公式,舍去负根,可得齿数Z,为:
图2渐开线少齿差内齿轮副封闭图
Z,二令〔一(K+J)+了(K+ J)2一4KJ(1一i. )] ・・・・・・・・・・・・・・・・・・・・・・・・・・・。・・・・・・・・・・・・・・・・・・・・・・・……(4) 由式(4)可知:只要预先选定K,J的值,将KJ与给定传动比i,a的数值一并代人式(4),即可求出Z,a如果Z,带有小数部分应取整,然后与KJ一并代人式(3)计算实际传动比,取整后计算出的实际传动比与给定值必有误差,只能得到近似解;如果由式(4)求出的恰为整数,计算出的实际传动比必定与给定值完全相同,此时可得到准确解。最后将Z, ,K与J代人式(2),即可确定其余齿数Z2 A与Z4之值。
3少齿差传动中的主要干涉限制条件 NN型传动的两个内齿轮副都属于渐开线少齿差内齿轮副。然而对于渐开线少齿差内齿轮副而言,其干涉限制条件很多,如果将内、外齿轮分开计算,其干涉限制条件可多达十几条。但理论分析与应用实践表明,其齿轮副存在几个主要干涉限制条件,与其他条件相比,它们构成更强的约束,在它们得到满足后,其余条件可自行满足或易于通过。 图2给出4幅封闭图,观察封闭图可知:对于渐开
图2中,限制线1为齿廓重迭干涉条件G,:二0;限制线2为重合度e,:二1;限制线3为外齿轮齿顶与内齿轮齿根之顶隙口:=0. 25m;限制线4为外齿轮插齿时不产生顶切的极限情况;限制线5为内齿轮插齿时不产生径向切人顶切的极限情况。
设计参数的选择下面对NN型传动机构中的内齿轮副1的设计参数确定方法进行说明,内齿轮副2的设计参数确定方法与之相同,区别仅在于两者的齿数不同,外齿轮1和外齿轮3的变位系数选取略有不同。其余参数的选取方法相同。4.1有关的计算公式 本文所有设计计算的公式均选自文献【2]0 在文献【2〕中,采用DIN标准计算齿顶圆:d.,二m(Z, +2ha +2x,),心二m(几一2ha +2x,),其中ha为齿顶高系数;m为模数;二:,x:分别为外、内齿轮变位系数。这样,在几何参数计算中不涉及到刀具参数,使问题大为简化,且具有通用性。由于在少齿差传动中均采用短齿制,而刀具采用正常齿,故顶隙是能够得到保证的。 一由计算公式可知,齿廓重迭干涉条件Gilt与重合度e,2是五个基本设计参数心,Z,.Z2、二,和二:的函 117
万方数据现代制造工程2007年第8期设备设计/诊断维修/再制造数,齿数与变位系数又经常以齿数差Z2一2、、变位系数差x:一x,的形式出现。至于啮合角『,在齿数差几一Z;确定之后,仅与二:一x,有关(压力角a =200)而最小啮合角a。即对应于“2二0时的啮合角,同时还与ha有关。4.2 x:一x,与。‘的选择 在Z2一Z;与ha*确定之后,要同时满足“2 >0与e,2 > 1,关键决定于变位系数差x:一x,的正确选取(或决定于啮合角a‘的正确选取)。 x2一x,有一个选取或变动范围,其下限对应于G.,2 = 0,此时x:一x;为最小值(显然,啮合角a‘也为最小值,即x:一x;的最小值对应于最小啮合角a’min,重合度e,2为最大值;随着x:一x,之值的增大,吼:值增大,a’增大,而e,2减小。当e,2减小到e,:二1时,x:一二,达到最大值,即其上限,同时几2与a’也达到各自的最大值。设计时应在避免齿廓重迭干涉的条件下使啮合角尽量小,根据实际经验,考虑到制造与装配误差,取“2二0.1左右时可确保不会发生齿廓重迭干涉,啮合角a'与变位系数差x:一x;的选用推荐值如表1所示[[21,表中数值就是按外齿轮齿数Z, =100,变位系数二;=0时,取G,12 = 0. 1计算出来的。若Z, < 100或x, > 0,按表1选取C,与二:一x:之值,句2略大于0.10在Z, :30,x, ,< 1. 5的范围内,G,12最大值不超过0.4.
重合度e,:二1.05和顶隙C12二0. 25m时:、的取值上限如表2所示。在计算表2中二:的上限值时,对应的啮合角是按表1选取的。表中不带*号者表示x,取值上限受到重合度e,:二1.05的限制,:;的上限值与插齿刀参数无关,只要取二;小于或等于表中x,之值,即可保证e12) 1,同时有C12 },>0. 25m。带*号者表示x,取值上限受到顶隙q:二0. 25m的限制,x,与插齿刀参数有关,如果设计时插齿刀参数与表注不同,表中数值可供估算。估算方法是:插齿刀齿数Zo <25或齿顶高h, > 1. 25m或变位系数二。>0时,x,实际上限值会略大于表中之值,反之则小于表中之值。设计选用x;时,距离其上限值留有裕量,这样顶隙验算容易通过。
表2外齿轮变位系数x,的上限值齿数差齿数齿顶高系数ha几一Z, Z, 0.80 0.60齿数差齿数齿顶高系数h:
几一Z, Z, 0.80 0印 40 0.15一0.501 60 0.30 -0.70 100 0.70一1.00 40 0.95 0.002 60 1.35.0.10 100 1.95.0.19
40 0.95.0.253印1. 30' 0.35 100 1.75.0.60 40 0.90' 0.354 60 1.25.0.50 1以)1.70.0.85注:插齿刀参数Zo =25,h,0 =1. 25m,xo二0