一种利用分块统计的虹膜定位算法
一种快速虹膜定位方法

一种快速虹膜定位方法
杜德生;高雪莲;张格森
【期刊名称】《计算机工程与应用》
【年(卷),期】2010(046)007
【摘要】虹膜定位是虹膜识别中非常重要的一个环节.首先利用灰度平均值法找到瞳孔内初始定位点,并提出一种通过边缘检测模板的新瞳孔定位方法,同时引入C-均值动态聚类分析法提高定位精度.然后在外边界粗定位的基础上,改进了虹膜外边界的精确定位方法,采用此种粗定位与精定位相结合的方法极大缩短了虹膜定位的时间,提高了定位的准确性.大量实验表明,该虹膜定位方法简单可靠,精确度高.取得了非常好的定位效果.
【总页数】4页(P165-167,177)
【作者】杜德生;高雪莲;张格森
【作者单位】哈尔滨理工大学自动化学院,哈尔滨,150080;哈尔滨理工大学自动化学院,哈尔滨,150080;哈尔滨工程大学信息与通信工程学院,哈尔滨,150001
【正文语种】中文
【中图分类】TP391.41
【相关文献】
1.一种快速而精确的虹膜定位方法 [J], 邵宇
2.一种粗细结合的快速虹膜定位方法 [J], 徐晓蓉;李永军
3.一种新型实用、快速的虹膜定位方法 [J], 张鹏翀;张丽珂
4.一种快速有效的虹膜定位方法 [J], 杨秀;张轩雄
5.一种快速有效的虹膜定位方法 [J], 杨秀[1];张轩雄[1]
因版权原因,仅展示原文概要,查看原文内容请购买。
一种基于圆几何特征的虹膜定位算法

1 引言
虹膜是指 白色巩膜与黑色瞳孔之 间的色素沉着 区
虹膜 内外边界都具有较好的圆环特性 ,因此传统
的虹膜定位算 法都是采 用圆形检测算子提取虹膜 内外 边缘。 定位虹膜 定位 方法主要有 J h a g n提 出 o nD u ma
域 ,如图 1所示。虹膜 识别具 有普遍性 、唯一性 、稳 定性 、受保护性、非入侵 检测性和 防伪性等优点。非 入侵检测性( 或非接触式) 的生物特征 识别是 身份 鉴别 研究与应用发展 的必 然趋 势 ,与人脸 、声音和 步态等
采集 的虹膜 图像质量的不确 定性 ,上述算法都有一定
性。据 统计 ,虹膜识别 的错误率是 各种 生物特征识别 中最低 的【。 I 】
虹膜识别技术主要 由虹膜 图像采集 、虹膜定位 、 特征提取 、匹配 与识别等几个环节组成。虹膜定位就 是虹膜 内边缘( 瞳孔) 与虹膜外边缘 的定位 , 由于图像采
2 01 0年 第 1 9卷 第 1 期 0
计算法①
魏 炜 ( 苏州卫生职业业技术学院 江 苏 苏州 2 0 2 1 0) 5
摘
要 : 虹膜定位是 虹膜识 别 中基础性环 节,其精度和 速度 决定 了虹膜识别 系统的性能 ,为提 高虹膜定位 的速
的耦 合性缩小微积分方法搜索外边缘 的范 围 ,减少运
的适 用范 围 ,微积分 方法定位精度高 ,缺点是计算量 大, 且容 易受到局部光源 的影响 ; o g H u h变换与最小
二乘法是基于 二值化边界点 的定位方法 ,其前提是必 须将边界点与非边界点区分开来 , 否则不 能精确定位 ,
该算法也存在计算量大的问题。 针对以上算法的局限 , 许多文献提 出了粗定位与精定位相结合的方法 ,既保 证了定位精度 ,也提高 了定位 速度。本 文提 出了一种 利 用圆几何 特征快速定位 虹膜 内边缘 ,结合 内外边缘
基于二维小波变换及邻域均值滤波的虹膜定位算法

基于二维小波变换及邻域均值滤波的虹膜定位算法赵静【摘要】为了提高虹膜定位的准确率和速度,提出了一种基于二维小波变换及邻域均值滤波的虹膜定位算法.采用阈值法分割瞳孔,使用边缘检测算子检测瞳孔区域边缘,定位虹膜内边缘;然后对人眼图像进行二维小波处理降低虹膜图像的分辨率,以减少虹膜本身的纹理对判断外边缘点时所产生的影响;最后采用邻域均值滤波进行虹膜外边缘点提取,根据所得虹膜外边缘点确定虹膜外边界.仿真结果表明:该算法定位虹膜内外边界的平均时间为1.75s,准确卒为99.7%,其中虹膜外边缘定位误差小于4.2%,在虹膜识别系统中有较高的实际应用价值.%An iris localization algorithm based on two-dimensional wavelet transform and neighborhood average filter is proposed to improve the accuracy and the speed of the iris localization. Firstly, the algorithm segments the pupil area of the iris by the threshold. Secondly, it locates the iris inner edge by the edge detection operator in the pupil area. Thirdly, the human eye iris images is processed by the two-dimensional wavelet transform to reduce the image resolution, In order to reduce the impact of the iris texture on the judgment of the iris outer edge points. Fourthly, the algorithm extracts the iris outer edge points by the neighborhood average filter. Finally, it locates the iris outer edge by the outer edge points. The simulation results show that the algorithm locates the iris inner and outer edge with average time of 1. 75 s and accuracy of 99. 7%, the error of iris outer edge localization is less than 4. 2%, The algorithm has a higher practical value in the iris recognition system.【期刊名称】《宁夏大学学报(自然科学版)》【年(卷),期】2013(034)001【总页数】4页(P22-25)【关键词】虹膜识别;虹膜定位;二维小波变换;邻域均值滤波【作者】赵静【作者单位】宁夏大学数学计算机学院,宁夏银川 750021【正文语种】中文【中图分类】TP391.41虹膜作为重要的身份鉴别特征,具有唯一性、稳定性、可采集性、非侵犯性等优点.虹膜识别技术主要由虹膜图像采集、虹膜定位、特征提取、匹配与识别等几个环节组成,虹膜定位是其中的主要环节.虹膜定位是指对人眼图像中的虹膜内边缘(瞳孔)与虹膜外边缘的定位,定位的速度和准确性决定了整个虹膜识别系统方案是否实用可行.目前,虹膜边界定位主要有3类算法.John G.Daugman提出的微积分圆形边缘检测算子法[1],利用微积分算子搜索圆形边界定位出虹膜的内外边界.R.P.Wildes 提出了二维高斯算子与边缘检测算子相结合的Hough变换算法[2].中科院自动化研究所王蕴红等利用阈值法分割瞳孔,用Canny算子对原图像进行边缘检测,然后用最小二乘拟合得到虹膜外圆的定位参数[3].随后,其他作者在这些算法的基础上所提出了相关改进算法[4—7].虽然这些方法都取得了较好的定位效果,但是不能满足实际应用中所要求的准确率.同时上述算法需要进行三维空间搜索,定位速度较慢,也不能满足实际应用中对定位速度的要求.本文提出了一种基于二维小波变换及邻域均值滤波的虹膜定位算法.本算法在二维空间进行搜索,提高了定位速度,定位虹膜的内外边缘准确率可达到99.7%,其中外虹膜定位误差小于4.2%.该算法的算法复杂度较低,易于硬件实现.1 虹膜内边(瞳孔)定位眼部图像有一定的灰度分布特点,瞳孔灰度要小于虹膜灰度,虹膜灰度要小于巩膜灰度[8].本算法首先采用阈值法分割瞳孔,然后采用边缘检测算子检测瞳孔区域边缘的方法定位内边缘.算法实现过程如下:1)用3×3邻域均值低通滤波模板对图像进行处理,对处理后的图像寻找灰度值最小点.该点为人眼图像瞳孔内的任意一点p.2)以该点的灰度值为阈值,在原图像上进行瞳孔分割处理.3)采用sobel算子对分割出的瞳孔图像进行边缘检测,得到瞳孔边缘图.4)应用所得瞳孔内的任意一点p的坐标及瞳孔边缘图,求得瞳孔的圆心及半径.计算过所得点p的x轴平行线与瞳孔边缘的两个交点P1,P1′,及距离该点垂直模板步长的另一个x轴平行线与瞳孔边缘的2个交点P2,P2′.令b1=(y1+y1′)/2,其中:y1为P1的y坐标;y1′为P1′的y坐标.同理,可计算b2.可由图示(图1)按下面方法计算出瞳孔边缘的圆心(a,b)和半径R:b=(b1+b2)/2,a=(x3+x3′)/2,R=(x3′-x3)/2,式中:x3为P3的x坐标,x3′为P3′的x坐标.图1 虹膜内边缘圆心、半径计算示意图2 虹膜外边定位虹膜与巩膜之间的灰度变化值并不如瞳孔与虹膜之间的灰度变化值剧烈,虹膜的外边缘灰度变化较为缓慢,用边缘检测算子不能很好地提取虹膜外边缘.本算法首先对人眼图像进行二维小波处理降低虹膜图像的分辨率,以减少虹膜本身的纹理对判断边缘点时所产生的影响;然后采用邻域均值滤波进行虹膜外边缘点提取;最后根据所得虹膜外边缘点确定虹膜外边界.2.1 二维小波变换处理设ψ(t)∈L2(R)(L2(R)表示平方可积的实数空间),其傅立叶变换为满足容许条件时,称ψ(t)为一个基本小波或母小波.将ψ(t)经伸缩和平移后就可得到一个小波序列式中a和b为伸缩平移因子.对于任意函数f(t)∈L2(R),其连续小波变换为在实际应用中,连续小波必须加以离散化.通常是将连续小波变换中的尺度参数a和平移参数b离散化,即,j∈Z,扩展步长a0≠1,为固定值.对应的离散小波函数为而离散化的小波变换系数则可表示为在图像处理时,用可分离变量方法由一维小波函数和尺度函数构造所需要的二维小波函数和二维尺度函数,它们为由小波函数的分离变量性质可知,二维分解过程可以通过两步完成.① 将信号f(x,y)的每一行(y取定值)看作一维信号进行分解;② 将这一中间结果的每一列看作以y为自变量的一维函数再作一次分解,即二维信号被分解为4个子波段,根据频率特征分别称为LL,LH,HL,HH.因此,二维小波变换具有对图像进行多分辨率分析的特性.由于双正交小波有利于保证图像边缘近似微分的性质,所以选择CDF构造方法,构造出M=4的紧支撑双正交CDF7-9小波(表1).表1 CDF7-9小波2~N,2 N k 1■2{~hk}1■2{hk }4,4 0 0.557 0.543 0.602 0.949 0.526 0.229 0.018 0.236-1,10.295 0.635 0.226 0.864 0.8810.557 0.118 0.443-2,2-0.028 -0.771 -0.078 -0.223-0.763 -0.114 -0.266 -0.529-3,3-0.045 -0.635 -0.016 -0.864-0.881 -0.557 -0.118-0.443-4,4 0.000 0.026 0.748 0.757 0.411用CDF7-9小波对人眼图像进行处理,可得到小波处理后的低分辨率图像.图2为对CASIA 1.0版本虹膜数据库中的‘008-1-1.bmp’图像处理所得到的4幅图像.其中图2a为原图经x维和y维都是低通滤波处理所得的图像,图2b为原图经x维高通滤波和y维低通滤波处理所得的图像,图2c为原图经x维低通滤波和y维高通滤波处理所得的图像,图2d为原图经x维和y维都是高通滤波处理后所得到的图像.其中图2a包含的ωx和ωy均为低频信号分量,是原图像降低分辨率后所得的图像,所以采用图2a进行进一步的虹膜外边缘各点定位.图2 小波变换结果图2.2 邻域均值滤波提取虹膜外边缘点人眼图像中虹膜和巩膜部分的灰度差别不大,其边缘灰度变化较为缓和.为了较好地定位虹膜外边缘点,本算法采用邻域均值模板由瞳孔向虹膜外边缘方向进行滤波处理,选择滤波模板灰度均值变化最大的点为虹膜外边缘点.邻域均值滤波器是一种非线性滤波器[9],处理方式为将模板按指定方向在图像中漫游,将模板中心与图中某个像素位置重合,读取模板下各对应像素的灰度值,计算灰度均值,将这个中间值赋给对应模板中心位置的像素.该处理方式可以更好地体现整个模板区域的灰度变化.2.2.1 计算右边缘点因为虹膜内靠近瞳孔部分纹理较多且密集,存在部分环形纹理,容易在判断外边界时产生误差,所以邻域均值模板在(a+1.5R,b)处开始水平向右进行滤波处理,其中(a,b)和R为瞳孔边缘的圆心和半径.因为虹膜和巩膜灰度变化较为缓慢,如果滤波值比较范围较小,不容易检测到灰度的变化.因此,在处理过程中取2倍的模板长度作为比较步长来进行灰度变化比较.此外,由于向右时巩膜灰度大于虹膜灰度,所以在判断灰度变化最大值点时,需要判断后一个滤波值大于前一个滤波值.取符合条件的邻域均值滤波值变化最大点为虹膜外边缘点P1.同理,分别取起始点为(a+1.5R,b+R/2),(a+1.5R,b-R),(a+1.5R,b-R/2)开始水平向右进行滤波处理,求得符合条件的虹膜外边缘点P3,P5,P7.2.2.2 计算左边缘点邻域均值模板由(a-1.5R,b)处开始水平向左进行滤波处理,同理,在判断灰度变化最大值点时,需要判断后一个滤波值大于前一个滤波值.取符合条件的邻域均值滤波值变化最大点为虹膜外边缘点P2.同理,分别取活动窗起始点为(a-1.5R,b+R/2),(a-1.5R,b-R),(a -1.5R,b-R/2)开始水平向左进行滤波处理,求得符合条件的虹膜外边缘点P4,P6,P8.2.3 计算虹膜外边缘半径瞳孔是人眼睛内虹膜中心的小圆孔,是光线进入眼睛的通道.虹膜上平滑肌的伸缩,可以根据光线的强弱调整瞳孔的大小,所以虹膜的内外边缘可以看作近似同心圆(虹膜产生病变除外).因此,本算法采用已求得的瞳孔圆心作为虹膜外边缘圆心,根据所取得的虹膜外边缘的8个边缘点来计算虹膜外边缘半径,以确定虹膜外边界.计算方法为分别计算8个边缘点与瞳孔圆心的距离,去除距离最大的点和距离最小的点,剩余6个距离值求均值作为虹膜外边缘圆的半径.该算法可以减少一定的误差,提高外边缘定位的准确率.图3为对‘008-1-1.bmp’图像处理所得到的虹膜外边缘点和虹膜外边界.图3 虹膜外边缘点检测及外边界确定3 实验结果分析本算法在 Matlab 7.0环境下,以CASIA 1.0版本虹膜数据库756幅图像进行实验.虹膜内外边缘定位结果见图4.图4 虹膜内外边缘的定位结果图实验结果中:754幅图像可准确定位图像虹膜内边界,2幅图像定位内边界失败;722幅图像可准确定位虹膜外边界(图5a和5b),32幅图定位虹膜外边界存在小于10%的误差(图5c和5d).定位一幅图像的平均时间为1.75s.本算法可定位内外边界的准确率为99.7%,其中外虹膜定位误差小于4.2%.因为虹膜信息较集中于虹膜内边,所以虹膜外边界的较小误差不会影响虹膜主体特征的提取.从实验结果可以看出,本算法的复杂度低,准确率较高,所需时间较短,易于硬件实现,在虹膜识别系统中有较高的实际应用价值.4 结语本文提出了一种基于二维小波变换及邻域均值滤波的虹膜定位算法.该算法只在二维空间进行搜索,提高了定位速度.该算法可达到99.7%准确率定位虹膜内外边界,其中外虹膜定位误差小于4.2%.可见该算法的准确率较高,所需时间较短,算法复杂度较低,易于硬件实现,在虹膜识别系统及相关设备实现中有较好应用前景.参考文献:[1]DAUGMAN J G.High confidence visual recognition of persons by a test of statistical independence[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1993,15(11):1148-1161.[2]WILDES R P.Automated iris recognition:an emerging biometric technology[J].Proceedings of the IEEE,1997,85(9):1348-1363. [3]王蕴红,朱勇,谭铁牛.基于虹膜识别的身份鉴别[J].自动化学报,2002,28(01):1-10.[4]SHAMSI M,SAAD P B,IBRAHIM S B,et al.Fast algorithm for iris localization using Daugman circlar integro differential operator[C]//International Conference of Soft Computing and Pattern Recognition,Malacca:IEEE,2009:393-298.[5]杜德生,高雪莲,张格森.一种快速虹膜定位方法[J].计算机工程与应用,2010,46(7):165-167.[6]TIAN Qichuan,PAN Quan,CHENG Yongmei,et al.Fast algorithm and application of Hough transform in iris segmentation[C]//Proceedings of 2004International Conference on Machine Learning and Cybernetics,IEEE,2004:3977-3980.[7]李晶晶,张健.虹膜图像内外边缘定位算法研究[J].通信技术,2010,43(05):178-180.[8]王江南,吴冬梅.一种基于几何原理的虹膜定位算法[J].计算机应用与软件,2010,27(1):250-251.[9]章毓晋.图像处理和分析[M].北京:清华大学出版社,2000:84-85.。
虹膜定位算法研究及其嵌入式软件平台设计的开题报告

虹膜定位算法研究及其嵌入式软件平台设计的开题报告一、选题背景及研究意义虹膜定位可以用于个体识别、生物特征认证等领域,对于网络安全、门禁管理等方面有着广泛的应用。
但是虹膜定位存在光线条件、眼部变化、运动模糊等问题,需要开发精确高效的算法来提高虹膜定位的准确率和鲁棒性。
此外,嵌入式设备在虹膜识别中也极为方便和实用,因此需要设计一个嵌入式软件平台。
由此,本论文选题即旨在探索虹膜定位算法研究和嵌入式软件平台设计。
二、研究方法和步骤本论文将采取如下步骤进行研究:1.研究虹膜成像原理和虹膜定位技术:探究虹膜成像原理及虹膜定位技术,分析虹膜图像中出现的干扰因素。
2.综合比较虹膜定位算法:分析现有虹膜定位算法,分别从准确率、鲁棒性、效率等角度进行综合评估和比较,找到合适的虹膜定位算法。
3.设计虹膜定位软件平台:根据选定的算法,设计一个嵌入式软件平台,包括硬件和软件,完成虹膜图像采集、图像处理、特征提取、比对等功能。
4.评估和分析虹膜定位的结果:对虹膜定位结果进行评估和分析,比对识别结果与实际值。
三、预期成果和意义1.基于研究新算法将提高虹膜定位的准确率和鲁棒性。
2.将开发一款适用于嵌入式设备的虹膜识别软件平台,加强了虹膜识别的应用场景和普及。
3.本研究成果将有望应用于生物识别、信息安全、门禁管理、高端智能家居等多种领域,具有重要的应用价值。
四、研究计划和进度安排本研究的预期时间表如下:第一阶段(1个月)文献综述,对虹膜定位和嵌入式软件平台现状进行综合分析。
第二阶段(2个月)在文献综述的基础上,制定虹膜定位算法研究和嵌入式软件平台设计的具体方案,并完成初步成果。
第三阶段(2个月)在第二阶段的基础上,完成虹膜定位算法的优化和嵌入式软件平台的设计与实现,初步验证算法的有效性。
第四阶段(1个月)对第三阶段的成果进行性能测试和分析,撰写论文并完成答辩。
五、论文结构安排本论文将由以下几部分组成:第一章:绪论,介绍论文选题和研究的背景、意义、研究目的和任务,以及研究方法和步骤。
精确定位虹膜的眼动跟踪算法
m o d e l s f o r e y e s a n d g a z e[ J ] . I E E E T r a n s o n P a t t e r n A n a l y s i s
a nd Ma c hi n e I n t e l l i g e nc e ,2 0 1 0, 3 2( 3 ): 4 7 8 — 5 0 0 .
c e e d i n g s o f t he I n t e r n a t i o n a l Co n f e r e n c e o n Wa v e l e t An a l y s i s
a nd Pa t t e r n Re c o g n i t i o n,2 0 0 7:6 8 7 2 .
[ 3 ]Z HA N G Z u t a o .D r i v e r ’ s e y e t r a c k i n g t e c h n o l o g y r e s e a r c h b a s e d o n s a m p l i n g t h e o r y o f s t r o n g t r a c k i n g n o n - l i n e a r f i l t e r[ D ] .
在计算虹膜区域梯度方 向特征时 ,增加 了时间,但是 由于增 强了跟踪 目标 与干扰 因素的差异 ,均值漂移迭代次 数大大减 少 ,一般 只需要 1 — 2次 ,故在耗时上 低于其他方法 。本 文算
参考 文 献 :
E l i Q i Y i n g , Wa n g Z h i l i a n g , Hu a n g Y i n g .A n o n - c o n t a c t e y  ̄ g a z e t r a c k i n g s y s t e m f o r h u ma n c o mp u t e r i n t e r a c t i o n[ c ]/ /P r o —
采用Hough变换定位出虹膜内外边缘的圆心和半径
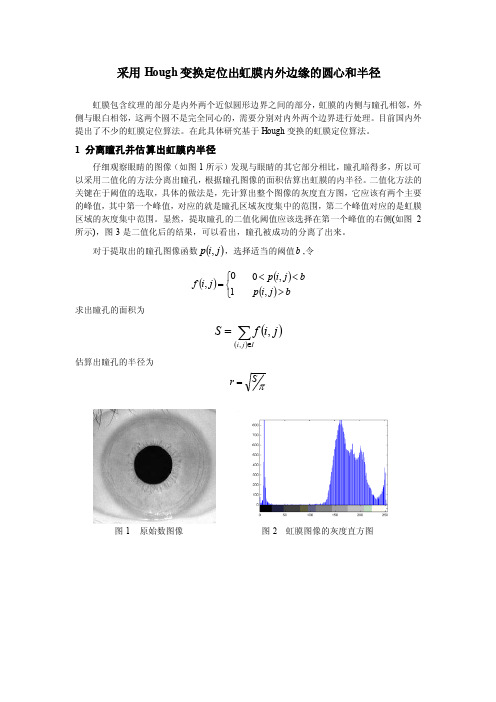
采用Hough 变换定位出虹膜内外边缘的圆心和半径虹膜包含纹理的部分是内外两个近似圆形边界之间的部分,虹膜的内侧与瞳孔相邻,外侧与眼白相邻,这两个圆不是完全同心的,需要分别对内外两个边界进行处理。
目前国内外提出了不少的虹膜定位算法。
在此具体研究基于Hough 变换的虹膜定位算法。
1 分离瞳孔并估算出虹膜内半径仔细观察眼睛的图像(如图1所示)发现与眼睛的其它部分相比,瞳孔暗得多,所以可以采用二值化的方法分离出瞳孔,根据瞳孔图像的面积估算出虹膜的内半径。
二值化方法的关键在于阈值的选取,具体的做法是,先计算出整个图像的灰度直方图,它应该有两个主要的峰值,其中第一个峰值,对应的就是瞳孔区域灰度集中的范围,第二个峰值对应的是虹膜区域的灰度集中范围。
显然,提取瞳孔的二值化阈值应该选择在第一个峰值的右侧(如图2所示),图3是二值化后的结果,可以看出,瞳孔被成功的分离了出来。
对于提取出的瞳孔图像函数()j i p ,,选择适当的阈值b ,令()⎩⎨⎧=10,j i f ()()b j i p b j i p ><<,,0 求出瞳孔的面积为()()∑∈=Ij i j i f S ,, 估算出瞳孔的半径为 πSr =图1 原始数图像 图2 虹膜图像的灰度直方图图3 二值化方法定位瞳孔2 采用改进的Hough 变换算法定位出虹膜内外边缘(一)Hough 变换的原理Hough 变换的实质是将图像空间的具有一定关系的像元进行聚类,寻找能把这些像元用某一解析形式联系起来的参数空间累积对应点。
采用Hough 变换检测任意曲线的原理如下:假设()y x a a f a n n ,,,...,11-= (1)为需检测曲线的参数方程,式中n a a , ... ,1为形状参数,y x ,为空间域的图像点坐标,对于图像空间的任意点()00,y x ,利用(1)式可将其变换为参数空间()n a a ,...,1中的一条曲线。
基于深度学习的虹膜识别与分类算法研究
基于深度学习的虹膜识别与分类算法研究虹膜识别技术是一种基于虹膜独特性的生物特征识别技术,被广泛应用于安全领域。
随着深度学习技术的快速发展,深度学习算法在虹膜识别与分类中也得到了广泛应用。
本文将重点研究基于深度学习的虹膜识别与分类算法,并对其进行详细探讨和分析。
首先,我们将介绍虹膜识别技术的基本原理和发展历程。
虹膜是人眼中最内层的一层,具有独特性和稳定性。
通过采集和分析人眼中的虹膜图像,可以得到一个具有高度个体差异性的生物特征模板。
这个模板可以被用作身份认证和安全访问控制等领域。
然后,我们将介绍深度学习技术在虹脉图像处理中的应用。
传统的机器学习方法在处理大规模数据集时存在一定局限性,而深度学习算法通过多层次、非线性变换的方式可以自动学习特征表示,从而提高了识别的准确性和鲁棒性。
我们将重点介绍卷积神经网络(CNN)和循环神经网络(RNN)在虹膜识别中的应用,以及它们在特征提取和分类中的优势。
接着,我们将详细介绍基于深度学习的虹膜识别与分类算法。
首先,我们将介绍虹脉图像采集和预处理过程。
虹脉图像采集过程中需要注意环境光、眼动等因素对图像质量的影响,并对采集到的图像进行预处理以提高后续处理算法的准确性。
然后,我们将介绍基于深度学习的特征提取算法。
传统方法中常用的特征包括灰度共生矩阵、Gabor滤波器等,而基于深度学习的方法可以通过训练自动学习到更具有鉴别性和泛化能力的特征表示。
我们将详细介绍CNN在虹脉图像中应用于特征提取,并讨论其与传统方法之间的差异。
最后,我们将介绍基于深度学习的分类算法。
传统的分类方法包括支持向量机、K近邻等,而基于深度学习的方法可以通过训练神经网络实现端到端的分类。
我们将详细介绍基于CNN和RNN的分类算法,并讨论它们在虹膜识别中的性能和优势。
在实验部分,我们将使用公开数据集进行实验验证。
通过比较传统方法和基于深度学习的方法在虹膜识别与分类中的性能,可以验证深度学习算法在虹膜识别中的优势。
一种快速虹膜定位算法
一种快速虹膜定位算法
郭永彩;徐梅宣;高潮
【期刊名称】《光电工程》
【年(卷),期】2005(032)007
【摘要】针对虹膜内边缘易变形,外边界边缘模糊从而虹膜定位困难等问题,提出了一种快速虹膜定位算法.基于虹膜边缘图像的几何特征,依据偏差平方和定位虹膜内边缘;利用图像灰度曲线得到模糊外边缘的边缘点,根据圆的相交弦性质以及投票策略确定虹膜外边缘的圆心,从而快速定位虹膜外边缘.实验结果表明,该方法提高了虹膜定位的速度以及定位的稳定性,减少了传统虹膜定位算法中搜索的盲目性.
【总页数】5页(P33-37)
【作者】郭永彩;徐梅宣;高潮
【作者单位】重庆大学,光电工程学院,重庆,400044;华南农业大学,工程学院,电子信息工程系,广东,广州,510640;重庆大学,光电工程学院,重庆,400044
【正文语种】中文
【中图分类】TP391
【相关文献】
1.一种快速的虹膜定位算法 [J], 贺力文
2.一种改进的快速虹膜定位算法 [J], 董钦科;谭茹
3.一种基于形态学的虹膜定位快速算法 [J], 彭建;向军
4.一种新的快速虹膜定位算法 [J], 杜德生;高雪莲;张格森
5.一种改进的快速虹膜定位算法 [J], 董钦科;谭茹
因版权原因,仅展示原文概要,查看原文内容请购买。
一种基于几何特征的虹膜定位算法
虹膜 是 指 白色巩 膜 与 黑 色 瞳孔 之 间 的色 素 沉 着 区 域 , 图 1 如 所 示 。虹 膜识 别具 有 普 遍性 、 一 性 、 定 性 、 保 护 性 、 入 侵 唯 稳 受 非 检测 性 和防伪 性 等优 点 。非 入 侵 检 测 性 ( 或非 接 触 式 ) 的生 物 特 征 识 别是 身 份鉴别 研 究 与应 用 发 展 的必 然 趋 势 , 人 脸 、 音 和 与 声
A b t a t I sl a in i a a o e so n a rs r c g to y tm . e s ed a c urc ft e i slcain d cde s r c r oc to s a b s lpr c s i n i n i e o niin s se Th pe nd a c a y o h r o to e i i i i t e p f r a c ft rsr c g iin s se . n o de o f se he s e fi sl c to t i p ri r d e a tlc to l o h erom n e o he i e o nto y t m I r r t a tn t pe d o r o ai n,h spa e nto uc sa fs o a in a g — i i i h frpu l e e tn a e n t e g o ti a h r ce tco ice. i gt e c u i r l t rt m o pi d t ci g b s d o h e merc lc a a trsi fcr l Usn h o pl e ains i e we n t n ra d o e i ng o h p b t e hei ne n utr e g s o h rs i a e,he s a c a e o ac l t o o lc t utrb un a e sg e ty r du e Ex e me t ho t tt d e ft e i m g t e r h r ng fc lu usme h d t o ae o e o d r s i r al e c d. p r i i i ns s w ha he
基于matlab虹膜内外边界的定位
摘要生物特征识别是一种根据人体自身所固有的生理特征和行为特征来识别身份的技术,即通过计算机与光学、声学、生物传感器和生物统计学原理等高科技手段密切结合,利用人体固有的生理特性和行为特征来进行个人身份的鉴定。
生物特征识别技术具有不易遗忘、防伪性能好、不易伪造或被盗、随身“携带”和随时随地可用等优点。
虹膜识别是一种新颖的基于生物特征的身份鉴别方法,在信息及安全领域有着重要的应用价值。
在总结前人工作的基础上,就虹膜成像、虹膜区域定位、等关键术进行了讨论,给出了一些相关的改进及微积分算法,实现了一套基于虹膜识别的定位系统。
实验结果验证了工作的有效性。
虹膜定位是虹膜识别的重要步骤,因而精确而快速地进行虹膜定位是有效地进行虹膜识别的重要前提。
虹膜定位是虹膜识别过程中的重要环节,定位的速度和精度决定了整个虹膜识别系统的性能.本文根据虹膜图像特点“先对其进行预处理”再用灰度投影法粗定瞳孔圆心。
然后应用微积分算子法进行虹膜内外边界的定位,该算法是基于Daugman算法。
最后在matlab中实现定位过程。
关键词:虹膜定位,生物特征识别,微积分算子,Daugman算法AbstractThe biological features recognition is one kind of basis human body own inherent physiology characteristic and the behavior characteristic distinguishes the status the technology,Namely through the computer and optics, acoustics, the biosensor and the biometrics principle and so on high tech method unifies closely,Carry on individual status using the human body inherent physiology characteristic and the behavior characteristic the appraisal。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第9卷 第1期2004年1月中国图象图形学报JournalofImageandGraphicsVol.9,No.1Jan.2004
收稿日期:2002-09-25;改回日期:2003-08-05一种利用分块统计的虹膜定位算法李动恒 殷珊珊 庄镇泉 马庆军(中国科技大学电子科学与技术系,合肥 230026)
摘 要 虹膜识别是一种新兴的生物特征识别技术,而虹膜定位是虹膜识别的重要步骤,因而精确而快速地进行虹膜定位是有效地进行虹膜识别的重要前提。为了能够快速地进行虹膜定位,在简要介绍现有的虹膜定位算法的基础上,提出了一种新的利用分块统计的虹膜定位算法。由于虹膜边缘可以简单地用圆周描述,因此,该算法第1步先阈值化分割图像,以分别建立虹膜和瞳孔的二进制位图;第2步用游长编码的方法来寻找最大色块的质心,并计算边界点到质心距离的均值。实验结果表明,对于虹膜定位而言,该算法是实用而且有效的。关键词 虹膜识别 虹膜定位 生物特征识别中图法分类号:TP391.41 文献标识码:A 文章编号:1006-8961(2004)01-0035-05
AnAlgorithmforIrisLocalizationUsingBlockStatisticLIDong-heng,YINShan-shan,ZHUANGZhen-quan,MAQing-jun(DepartmentofElectronicScienceandTechnology,UniversityofScienceandTechnologyofChina,Hefei230026)
Abstract Irisrecognitionisanemergingbiometrictechnologyforpersonalidentification,whereasirislocalizationisacrucialpartintheprocessofirisrecognition,thusobtainingtheirislocalizationpreciselyandfleetlyisthepre-ludeofeffectiveirislocalization.Forthepurposeoflocalizingirisprecisely,thispaperputsforwardanovelalgo-rithmofirislocalizationusingblockstatisticwhilebasedonintroducingsomeprevailingalgorithmsforirislocaliza-tion.Theboundariesthatdelimitiriscanbemodeledinasimplewaywithcircularcontours.Therefore,thefirststepinthepaperconsistsofthresholdingtheirisimageintensitytobuildtwobinarybitmapsforthesucceedingim-ageprocession,oneforthewholeirisandtheotherforthepupil.ThesecondstepistosearchforthecentroidofthelargestblockintheirisbinarybitmapsbymeansofRunLengthEncoding(RLE),andcalculatetheaveragedistancefromeachpointoftheboundariestothecentroidobtainedbefore.Experimentsshowthatthealgorithmisefficientandsuccessfulforthepurposeofirislocalizing.Keywords Irisrecognition,Irislocalization,Biometrics
1 引 言随着计算机技术和信息科学的发展,世界各国越来越重视信息安全问题,通过传统的数字密码与加密算法来进行身份认证的技术,由于这种密码容易伪造或遗忘而受到了挑战,因此依靠生物特征的身份识别技术(Biometrics)蓬勃发展起来。生物特征识别就是利用计算机技术,对人体所固有的生理特征或习惯性的行为特征做出分析判断,用以进行个人身份鉴定。目前,可利用为生物特征识别的生理特征有指纹、掌纹、虹膜、视网膜、人脸等;行为特征有语音、手迹等。生物特征识别相对于传统密码的优势在于不易伪造和不会遗忘。虹膜识别是通过人眼的虹膜图像的纹理特征来对人进行身份识别,它是利用生物特征进行身份识别的主要手段之一。虹膜是眼睛内,介于巩膜与瞳孔间的部分,并有着非常丰富的纹理。自从Daugman提出用二维Gabor小波来提取虹膜特征,从而得到244个自由度特征后,虹膜识别技术得到了很大的发展[1,2]。目前,虹膜身份识别系统可应用于电子商务、授权支付、条件登录、权限信息和金融领域,具有很大的意义和价值。虹膜相对于其他的生物特征有以下的优点:(1)高度安全性,如前所述,虹膜可以得到244个自由度,而指纹只能有30到40个,另外,利用虹膜特有的对光的震颤现象可以判断是否为活体虹膜,从而可防止伪造;(2)高度稳定性和唯一性,因为虹膜纹理是随机形成的,而且出生一年后纹理固定不再变化,同时虹膜本身也极少受到损害。在现有图像采集的条件下,用CCD摄像头所得的虹膜图像不可能就只有虹膜,还包含了大面积的虹膜附近区域的信息,如瞳孔、巩膜、睫毛等,CCD摄像机采集所得的虹膜原始图像如图1所示。这些信息均对虹膜识别有一定影响,如果眼睑遮掩了一部分虹膜,则只能用上眼睑以下和下眼睑以上的图像。另外,还有瞳孔内的光源反射也可能对虹膜图像造成影响。虹膜定位是指利用数字图像处理算法把虹膜部分与眼睛的其他部分,如瞳孔、巩膜及眼睑分离开来。简单地说,就是找虹膜与瞳孔、巩膜及眼睑的边缘。通常该边缘会因眼睛图像色素剧变,而会有很强的对比度。由于虹膜定位是虹膜识别的重要步骤,其定位准确与否直接影响最终识别结果,而且,一般来说,虹膜定位也是虹膜识别系统最为耗时的部分,因此,研究一种快速而准确的识别算法十分重要。图1 虹膜原始图像2 现有的虹膜定位算法目前国内外虹膜系统所用的定位算法有Daug-man算法[3,4]和Wildes算法[5,6]。2.1 Daugman算法Daugman虹膜系统的定位算法[3,4]其核心在于利用一个有效的微积分算子来计算圆参数:maxGR(r)*55r∮r,xc,ycI(x,y)2Prds(1)式中,GR(r)=12PRe-(r-r0)22R2,xc,yc为圆心c坐标。此算子是一种经典的机器视觉算子,其中I(x,y)是在坐标(x,y)处二维数字图像的灰度值,*代表卷积;除以2Pr是用于归一化;GR(r)是标准差为R的高斯函数,用于起平滑滤波作用。式(1)表示算子在以(xc,yc)为圆心,以r为半径的圆周ds上,对像素灰度值做积分,并把它归一化,再求差分,而与差分的极值所对应的坐标(x,y,r)就是所求圆的圆心和半径。整个算子的作用为一个以尺度R模糊化的圆的边缘检测器,它可在参数空间(xc,yc,r)迭代求最优解。这种由粗到细的迭代搜索,使寻找的内外边缘可达到单像素精度。在搜索外边缘时,由于眼睑的影响,积分路线ds仅限于左右两边,而在找内边缘时,积分路线ds则是闭合的圆周,因此为了进一步精确定位虹膜,Daugman用相似的算法来检测上下眼睑的边界,这时算子的积分路径ds,即从圆变为圆弧。2.2 Wildes算法(1)Wildes系统[5~7]其寻找边界的过程可分如下两步:¹图像灰度信息被转化为一个二值化边界图;º通过边缘点投票来得到特别的边界参数值。其中边界图是通过基于成分的边缘检测来得到的,这个操作包括阈值化图像,也就是利用以下算子将图像阈值化gradG(x,y)*I(x,y)
grad≡55x,55y
G(x,y)=12PRe-(x-x0)2+(y-y0)22R2(2)I(x,y)是在坐标(x,y)处图像的灰度值;*为卷积。G(x,y)是以(x0,y0)为圆心,标准差为R的二维高斯函数,其作用是用于平滑图像,以确定边界;grad是二维拉普拉斯微分算子。二维高斯函数和拉普拉斯微分算子组合后与图像进行卷积,便可得到图像边缘。(2)投票过程可用Hough变换实现。特别对圆形内外边界和一些边界点(xj,yj),j=1,…,n,Hough变换定义为
H(xc,yc,r)=∑nj=1h(xj,yj,xc,yc,r)(3)
h(xj,yj,xc,yc,r)=1如果 g(xj,yj,xc,yc,r)=00否则g(xj,yj,xc,yc,r)=(xj-xc)2+(yj-yc)2-r2
对每个边界点(xj,yj),g(xj,yj,xc,yc,r)=0,而每对三维参数(xc,yc,r)则表示过此边界点的圆。相
36中国图象图形学报第9卷应的,如果那些具有最大H函数值的三维参数和最大边界点数等价,则它们就是表示边缘的参数。在实际执行中,搜索最大参数集的过程就是计算H数组,这个数组可用(xc,yc,r)的离散表示值做下标,然后扫描数组,即可得到数组元素最大值。上下眼睑的边界可用参数化的弧来代替圆参数。就像Daug-man系统依靠标准算法来定位虹膜一样,用Hough变换进行边缘检测也是一种基本的定位简单边界的机器视觉算法。3 利用分块统计的算法3.1 数学模型与预处理由于虹膜内外边缘具有近似圆的几何特性,因此可以用圆的数学模型来描述虹膜,但严格地说,内外两圆的圆心并不重合。假设对人眼是直立拍照的,由于瞳孔(内圆)圆心会比虹膜(外圆)圆心更偏向鼻梁及偏下,因此描述虹膜的数学模型是由两个不同心的内外圆所组成的近似圆环。若要求有更高的定位精度,还可用圆弧来表述虹膜与眼睑的边缘。为了使虹膜图像有足够丰富的纹理,以便提取特征,虹膜半径至少要达到70个像素,在实际使用中,虹膜半径在100个像素以上。 由于采集的原始图像不可地避免地存在噪声点,所以在精确定位前必须先对图像进行滤波降噪。通常用滤波器(如中值滤波器、高斯低通滤波器)就可达到去除噪声点的目的。其中,中值滤波器简单来说,就是用一个活动模板沿图像进行逐行逐个像素移动,每次移动把模板中心位置的像素灰度值置为窗口内所有像素灰度的中值;图2、图3是原始图像经过高斯低通滤波后的虹膜图像及其灰度统计直方图。未归一化及已归一化高斯低通滤波器数学表达式为
Gf(x,y)=e-(x2-y2)2R2
G(x,y)=Gf(x,y)∑n1∑n2
Gf