三坐标测量机球头测针补偿技术
三坐标温度补偿算法公式(一)

三坐标温度补偿算法公式(一)三坐标温度补偿算法公式1. 什么是三坐标温度补偿算法公式?三坐标温度补偿算法公式是一种用于三坐标测量仪器的测量值校准的方法。
由于温度的变化会对测量精度产生影响,所以需要进行温度补偿。
温度补偿算法公式可以根据测量的温度和其他相关参数,对测量值进行修正,提高测量精度。
2. 温度补偿算法公式的应用温度补偿算法公式广泛应用于各类精密测量领域中,例如机械制造、电子元器件制造等。
通过对测量仪器测量值的温度补偿,可以提高测量精度,减小测量误差,确保测量结果的准确性。
3. 温度补偿算法公式的列举以下是几种常见的三坐标温度补偿算法公式的列举:线性温度补偿公式C = A + B * T其中,C为补偿值,A和B为参数,T为温度。
线性温度补偿公式根据温度变化线性地修正测量值。
参数A和B 可以根据实际情况进行调整,以适应不同的测量设备和测量范围。
多项式温度补偿公式C = a0 + a1 * T + a2 * T^2 + ... + an * T^n其中,C为补偿值,a0~an为多项式系数,T为温度。
多项式温度补偿公式可以根据温度变化非线性地修正测量值。
多项式的阶数可以根据实际需要选择,通常选择2~4阶多项式。
指数温度补偿公式C = A * exp(B * T)其中,C为补偿值,A和B为参数,T为温度。
指数温度补偿公式通过指数函数修正测量值,适用于温度变化较大的情况。
参数A和B可以根据实际情况进行调整。
4. 温度补偿算法公式的示例解释以线性温度补偿公式为例,假设测量温度为20℃,参数A和B的值分别为2和。
根据公式计算补偿值:C = 2 + * 20 = 4通过线性温度补偿公式,我们可以得到实际测量值为4,而不是在未进行温度补偿时的测量值。
5. 总结三坐标温度补偿算法公式是用于提高测量精度的重要工具。
通过选取适当的补偿公式和参数,可以根据测量仪器的特性和使用环境,对测量值进行修正,减小温度变化对测量精度的影响,从而确保测量结果的准确性。
三坐标测量机的误差分析及其补偿

收稿日期: 1996- 03- 06 © 1994-2006 China Academic Journal Electronic Publishing House. All rights reserved.
46
沈 阳 工 业 学 院 学 报 1997 年
1. 2 三坐标测量机测头位置误差表达式
式 (1) 对坐标平移和旋转的坐标变换可应用到三坐标测量机中各滑台的平移和转动误差 向绝对坐标系的转换.
图 3 坐标系 向坐标系 的变换
图 4 三坐标测量机的坐标变换示意图
在图 1 中的 X 、Y、Z 的滑尺上分别建立三个坐标系 、 、 , 且使三坐标测量机的测头
xp
y=
- ex y + A - M y m - ey y + A -
- ezy + A -
yp
(3)
z
- ex z
- ey z
zm - ezz
zp
式 (3) 中的各误差项均是以绝对坐标系原点为起点, 在单一运动方向上测量的, 其误差评定基
准是理想的坐标轴方向. 因此, 式 (3) 中的误差分量包含三个滑尺运动方向的相互垂直度误差.
48
沈 阳 工 业 学 院 学 报 1997 年
x = x m - ex x - ey x - y m Ηx z (5)
y = y m - ex y - ey y
工作台数显装置为光栅尺, 误差测量装置和坐标值检定用双频激光干涉仪. 实验数据如表
2 所示.
表 2 测量数据
从实验中看出补偿后坐标值更接近于坐标检定值, 显示误差分别为 exm = 010479 mm , eym = - 010039 mm , 而补偿后坐标定位误差为 ex = 010038 mm , ey = 010005 mm.
三坐标温度补偿算法公式

三坐标温度补偿算法公式
首先,我们来看温度补偿系数的计算。
一般情况下,温度补偿系数可
以通过实验测得,其计算方式通常为:
\[C=A(T-T_r)\]
其中,\(C\)为温度补偿系数,\(A\)为常数系数,\(T\)为当前温度,\(T_r\)为参考温度。
常数系数\(A\)的值可以通过实验标定获得,其值与
测量装置的材料特性有关。
接下来,我们来看如何利用温度补偿系数对测量数据进行修正。
对于
三维测量中的坐标数据,其补偿公式为:
\[B = C \cdot S\]
其中,\(B\)为修正后的坐标数据,\(C\)为温度补偿系数,\(S\)为
原始坐标数据。
具体而言,对于三维测量中的每个坐标轴(如\(x\)、
\(y\)、\(z\)轴),都可以分别进行温度补偿,得到相应的修正坐标数据。
通过上述公式,我们就可以根据测量装置的温度变化情况来对测量数
据进行补偿,从而在一定程度上减小温度变化带来的测量误差。
需要注意的是,温度补偿算法公式中的常数系数\(A\)需要通过实验
进行标定。
实验时需要控制温度变化和测量装置的运动,记录不同温度下
的测量数据,并对数据进行分析得到合适的\(A\)的取值。
此外,温度补偿算法公式中的温度补偿系数\(C\)是一个与温度变化
呈线性关系的量,因此在实际应用中要求温度变化较小的范围内进行补偿,以保证算法的准确性。
综上所述,三坐标温度补偿算法公式是对温度变化引起的测量误差进行补偿的一种方法,通过计算温度补偿系数和修正坐标数据,可以有效减小温度变化对三维测量的影响,提高测量精度。
三坐标测量机测球直径的校正和误差分析

三坐标测量机测球直径的校正和误差分析摘要:三坐标测量机(CMM)以其测量精度高、稳定性好、操作方便快捷的特点广泛的被应用。
但是在使用三坐标测量机测量有些几何要素时,有时测量准确度不是很高。
文章对坐标测量原理进行简述,重点分析三坐标测量机测球直径的校正与误差。
关键词:三坐标测量机;球直径;误差1坐标测量的原理任何形状都是由空间点组成,所有的几何量测量都可归结为空间点的测量,因此精确进行空间点坐标的采集,是评定任何几何形状的基础。
坐标测量机的基本原理是将被测零件放入它已允许的测量空间,精密地测出被测零件表面的点在空间3个坐标位置的数值,将这些点的坐标数值经过计算机数据处理,拟合形成测量元素,如圆、球、圆柱、圆锥、曲面等,经过数学计算的方法得出其形状、位置误差及其他几何量数据。
用CMM进行零件测量,理论上,测头的球半径应为零,测头和工件接触为测头中心。
得到的数据是测头中心的坐标值,而非测头与被测件接触点的坐标值。
但实际上,测头有一半径,从而需要对测头直径进行校正,即进行测头球心轨迹曲面域和测头半径补偿。
2三坐标测量机测量的主要步骤2.1测头选择测头部分是测量机的重要部件,测头根据其功能有:触发式、扫描式、非接触式(激光、光学)等。
触发式测头是使用最多的一种测头。
一般的测头头部都是由一个杆和测球组成。
最常见的测球的材料是红宝石,因为红宝石是目前已知的最坚硬的材料之一,只有极少的情况不适宜采用红宝石球。
高强度下对铝材料制成的工件进行扫描时,选择氮化硅较好;对铸铁材料工件进行高强度扫描,推荐使用氧化锆球。
为保证一定的测量精度,在对测头的使用上,需要注意:(1)测头长度尽可能短:探针弯曲或偏斜越大,精度将越低。
因此在测量时,尽可能采用短探针。
(2)连接点最少:每次将探针与加长杆连接在一起时,就额外引入了新的潜在弯曲和变形点。
因此在应用过程中,尽可能减少连接的数目。
(3)使测球尽可能大:测球直径较大可削弱被测表面未抛光对精度造成的影响。
三坐标检定校准
三坐标检定校准三坐标测量机的测量精度和工作效率与测针的校准和选择紧密关联,在进行测量工作之前必须要合理的选择测针和对测针准确的校准,因为测针的测球有自己的尺寸,而测量零件的不同位置可能是用测球的不同位置去接触零件的,因此,测量的数据中含有测球自己的数值,而测针校准就是测量测球自己尺寸大小的过程。
特别是校准不同长度和位置的测针时测球校准结果球度误差的大小对测量结果的影响至关重要。
本文主要论述了三坐标测量机测针校准原理、校准注意事项以及合理选择三坐标测量机测针的原则。
三坐标测量机三坐标测量机测针校准的原理在测量采样过程中,当测针与被测件表面触碰时,测头系统就会有信号显示,作为测量的瞄准信号,进而通知计算机进行数据的采集,以得到得被测点的坐标值。
此外,由于测量机通过测头系统进行探测,得到的点位坐标值是测球中心的坐标值,为了获得被测工件的实际尺寸,还需加上或减去测球的动态直径值。
进入测头校准程序后,对标准球进行测量,测量方法与几何元素测量程序中的球的测量方法一样,当采点数量达到要求时,测量程序会自动对测量点进行计算处理,将处理后的测头校准结果,自动返回到测头校准对话框界面中。
在按下回车按键后,校准后的测头数据将作为修正值用于后续的应用数据处理中。
基准后的测头数据包括测头半径及球度误差还有测球中心相对于零号测头中心的坐标值。
三坐标测量机校准测针时需注意的问题①测前准备根据工件的测量范围以及需要测量的方向和位置,首先确定所需用的三坐标测量机测针组合,包括测针的直径、数量、方向和是否加装接长杆,尽量不在测量过程中更换测针。
②检测校准三坐标测量机测针校准时,应使所选测针在标准球的轴向最大直径处分别接触测量,以提高测针校准的准确度。
注意观察校准后测针的直径和校准时的形状误差,如果有较大变化,就需要查找原因。
需要进行6次以上的校准,观察其校准结果的重复性数据,以统计原理求出标准偏差进行分析。
③重复校准单个测针位置校准,需要观察测针直径和球度误差,三坐标测针直径应与平时校准相近且重复性好,球度误差也小,多个测头位置校准时,除要观察以上结果外,还要用校准后的各个位置的测针测量标准球,观察球心坐标值的变化,数值应与示值误差或探测误差相近。
三坐标检定校准
三坐标检定校准三坐标测量机的测量精度和工作效率与测针的校准和选择紧密关联,在进行测量工作之前必须要合理的选择测针和对测针准确的校准,因为测针的测球有自己的尺寸,而测量零件的不同位置可能是用测球的不同位置去接触零件的,因此,测量的数据中含有测球自己的数值,而测针校准就是测量测球自己尺寸大小的过程。
特别是校准不同长度和位置的测针时测球校准结果球度误差的大小对测量结果的影响至关重要。
本文主要论述了三坐标测量机测针校准原理、校准注意事项以及合理选择三坐标测量机测针的原则。
三坐标测量机三坐标测量机测针校准的原理在测量采样过程中,当测针与被测件表面触碰时,测头系统就会有信号显示,作为测量的瞄准信号,进而通知计算机进行数据的采集,以得到得被测点的坐标值。
此外,由于测量机通过测头系统进行探测,得到的点位坐标值是测球中心的坐标值,为了获得被测工件的实际尺寸,还需加上或减去测球的动态直径值。
进入测头校准程序后,对标准球进行测量,测量方法与几何元素测量程序中的球的测量方法一样,当采点数量达到要求时,测量程序会自动对测量点进行计算处理,将处理后的测头校准结果,自动返回到测头校准对话框界面中。
在按下回车按键后,校准后的测头数据将作为修正值用于后续的应用数据处理中。
基准后的测头数据包括测头半径及球度误差还有测球中心相对于零号测头中心的坐标值。
三坐标测量机校准测针时需注意的问题①测前准备根据工件的测量范围以及需要测量的方向和位置,首先确定所需用的三坐标测量机测针组合, 包括测针的直径、数量、方向和是否加装接长杆,尽量不在测量过程中更换测针。
②检测校准三坐标测量机测针校准时,应使所选测针在标准球的轴向最大直径处分别接触测量,以提高测针校准的准确度。
注意观察校准后测针的直径和校准时的形状误差,如果有较大变化,就需要查找原因。
需要进行6 次以上的校准,观察其校准结果的重复性数据,以统计原理求出标准偏差进行分析。
③重复校准单个测针位置校准,需要观察测针直径和球度误差,三坐标测针直径应与平时校准相近且重复性好,球度误差也小,多个测头位置校准时,除要观察以上结果外,还要用校准后的各个位置的测针测量标准球,观察球心坐标值的变化,数值应与示值误差或探测误差相近。
三坐标标准球校准指导书
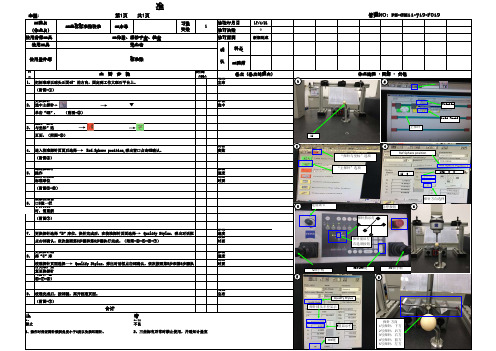
更换探针选 8、 择“C”库
校准探针页面选择 行完成,重 复更换探针 (附件-②⑤-⑦-⑧)
Qualify Stylus,弹出对话框点击OK确认,依次按照第5步和第6步骤执
9、 校准完成后,按OK键,离开校准页面。
(附图-⑦)
禁 止
1、 禁止
合计
2、操作时保证测针倾斜角度小于5度以免损坏测针。
异 常
S值显示栏 OK键
探针 方向
1号探针:下方 2号探针:后方 3号探针:右方 4号探针:前方 5号探针:左方
1.有 不良
2、三坐标有异常时禁止使用,并通知计量室
修改年月日 修订次数 修订原因
确 科长
17/4/21 0
新规制成
认 工程师
重点(重点的理由)
用无 尘布
库位 选中
所有 度数
移动 速度 采点 时要
移动 速度 采点 时要
移动 速度 采点 时要
用无 尘布
管理NO:PZ-GK11-719-F019
作业流程 ・图解 ・ 其他
习熟
1
天数
时间 (秒)
4、 进入校准探针页面后选择 (附图④)
通过操纵杆 5、 操作
运行以确定 标准球位 (附图⑤-⑥)
观察校准窗 6、 口S值一栏
于0.0010 时,需重新 (附图⑦)
Ref.Sphere position,弹出窗口点击OK确认。
7、 更换探针选择“B”库位,换针完成后,在校准探针页面选择 Qualify Stylus,弹出对话框 点击OK确认。依次按照第5步骤和第6步骤执行完成。(附图-②-⑤-⑥-⑦)
1
2
45° 3
主探针
Changer Load Probe
三坐标测量机测针的校准和选择分析

三坐标测量机测针的校准和选择分析三坐标测量机是一种高精度的三维测量设备,广泛应用于工业制造领域。
在三坐标测量机的测量过程中,测针的校准和选择非常重要,直接影响到测量结果的准确度和稳定性。
本文将就三坐标测量机测针的校准和选择进行分析,以期为相关行业提供一些指导性的意见。
一、测针的校准在三坐标测量机的测量过程中,测针的校准是非常关键的一步。
只有校准准确,才能保证测量结果的准确性和稳定性。
测针的校准主要包括以下几个方面:1. 长度校准测针的长度校准是指对测针的长度进行准确的测量和校准。
在进行长度校准时,需要使用标准的长度测量设备对测针的长度进行测量,然后根据测量结果对测针的长度进行调整,以确保其长度的准确度。
2. 直径校准3. 定位校准通过以上的测针校准步骤,可以有效地提高测针的准确性和稳定性,从而保证测量结果的准确性和稳定性。
二、测针的选择分析在三坐标测量机的测量过程中,测针的选择是非常重要的一步。
不同的测针具有不同的特点和适用范围,需要根据具体的测量需求进行选择。
下面就测针的选择进行分析:1. 测针的材质测针的材质对其使用性能有较大影响。
一般来说,硬度高、强度大、耐磨损性好的材质可以提高测针的使用寿命和稳定性。
因此在选择测针时,需要考虑其材质的硬度、强度和耐磨损性等特性。
测针的尺寸应根据具体的测量需求进行选择。
一般来说,测量精度要求高的情况下,需要选择直径较小、长度较长的测针;而对于测量精度要求一般的情况下,则可以选择直径较大、长度较短的测针。
因此在选择测针时,需要考虑其尺寸的大小与测量需求的匹配性。
三、总结对三坐标测量机测针的校准和选择进行了分析和总结,希望能够为相关行业提供一些指导性的意见。
在实际应用中,还需要根据具体的测量需求和实际情况进行具体的调整和实施,以达到最佳的测量效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三坐标测量机球头测针补偿技术*李君波 助理工程师(第七一七研究所)摘 要: 介绍了手动三坐标测量机测头跟踪原理,并分几种情况探讨了使用球头测针进行点位测量时,被测点坐标值的补偿方法及实现途径。
关键词: 三坐标测量机 球头测针 补偿* 收稿日期:1999-11-20。
1 引 言在使用手动三坐标测量机对工件进行多点位测量时,由于被测物体形状各异,工作量很大。
因此,提高硬件测量速度、改进操作流程、增强软件容错性及软件智能性等是提高测量效率的主要手段。
2 测头跟踪机制测头跟踪机制是一种增强软件智能性的技术。
其工作原理如下:图1链队列示意图图2 循环队列示意图每次测量一个点位,无论是重测还是新测,测针都需要运动一段距离,因此可在软件中设置跟踪机制,自动追踪测针的运动轨迹,根据采集到的测针碰触被测点位之前一段距离的坐标值集C OOR-SE T ={node 1,node 2, ,node n}(node n 为跟踪的最后一个坐标值)。
可分析测针从何方位碰触被测点位,再在使用球头测针时自动补偿,而不必在测量之前手动指定测量方位,增强了测量的智能化程度,提高了工作效率。
因为必须保存坐标值集COOR-SET 并且需在测针运动时不断更新数据、加入最新的坐标值、去除最老的坐标值,因此,坐标值集COOR-SE T 构成一个先进先出的队列。
可采用两种方式实现,即链队列和循环队列。
若采用链队列的方式,当加入新的结点P同时删除最老的队头结点时,进行如下操作:new(P); 申请新结点;p->data=xyz data;p->next=NI L;填入数据域,指针域置空;q.rear->next=P;q.rear=P;插入队尾;构成新的队尾结点。
q.front->next=q.front->next->next;free(q.front->next);修改队头指针指向原队列第二个结点,同时释放原第一个结点;注1:xyz data及结点的数据域分别为结构型XYZ DATA和DATA,描述为:struct ZYZ DATA{double x;double y;dou ble z;}struct DATA{double x;double y;double z;}为简单从事,以上语句p->data=xyz data;表示将三维坐标值同时赋值;实际编程时C语言不支持结构型变量的整体赋值。
若采用循环队列的方式,队列可用长度为maxsize的数组LIST ma xsize 来表示。
由问题需求出发,需维护一个最新的结点集合,队空时直接加入新值,队满时,由于循环队列头尾相接,可直接覆盖队头结点。
因此无须考虑队空、队满,仅需标记出最新结点的位置即可。
更新时需进行如下操作:q.front=(q.front+1)MOD maxsize; 指向插入位置;LIST q.front =xyz data; 插入新结点,若队列已满,覆盖队头结点值。
注2:xyz data及LIST的元素分别为结构型,其操作类似于注1。
比较以上两种实现方式,无疑采用循环队列,操作简单,效率较高。
3 补偿原理及实现实际测量时,被测点位情况各异,但其最基本的情形不多,以下分几种不同的情况讨论:假定: 球头测针的半径为R; 测量在笛卡尔坐标系中进行,且机器坐标系经过变换已与工件坐标系一致。
(1)垂直于任一坐标轴平面上的点位如图3所示,被测点A位于平行于坐标平面XOY的平面S上。
对此种类型的点,补偿最简单,仅需对采样坐标(x,y,z)中的一维进行补偿。
图3 被测点位在平行于Z轴的平面S上对A点,若已得采样坐标值(x0,y0,z0),则A点实际坐标为(x0,y0,z0 R)。
Z轴坐标加或减R,取决于测针从何方向碰触A点。
沿Z轴正向则+R,否则-R。
(2)斜面上的点位如图4所示,被测点位P在斜面S上。
右边为放大的局部图。
由于采样坐标值是测针球心O的坐标,而P点位于斜面上,要求点P的坐标,需对O的X、Y、Z三个坐标分量同时补偿。
问题是:现在仅知O的坐标及|OP|=R,OP的方向未知。
图4 被测点位位于斜面S面上补偿原理:由于OP 平面S,即OP与S的法线方向一致,因此要知道OP的方向必须求出S的法向,而S的法向可在平面上任意采样三点或更多的点来得到。
例如采样图4中d0、d1、d2三点的未补偿的坐标值,可求出S的法线方程。
由|OP|=R和S的法线方程联立求解,可得点P的找正坐标值。
补偿实现:设P点实际坐标及d0、d1、d2的采样坐标分别为:P(x p,y p,z p),d0(x0,y0,z0),d 1(x 1,y 1,z 1),d 2(x 2,y 2,z 2)设平面S 的方程为Ax+By+Cz+D=0,其中A,B,C,D 为待定参数。
确定A,B,C 即可得到S 的法向量N 。
用最小二乘法原理推导如下:F = 2i=0(Ax i +By i +Cz i +D)2=MINI 取其偏导数等于零:F A =2i=02(Ax i +By i +Cz i +D )*x i =0 F B =2i=02(Ax i +By i +Cz i +D )*y i =0FC= 2i=02(Ax i +By i +Cz i +D)*z i =0上述式子分解化简后得:A 2i=0x 2i +B 2i=0x i *y i +C 2i=0x i *z i + 2i=0x i *D =0A 2i=0x i *y i +B 2i=0y 2i +C 2i=0y i *z i + 2i=0y i *D =0A 2i=0x i *z i +B 2i=0z i *y i +C 2i=0z 2i + 2i=0z i *D =0解上述方程组可得到平面S 的方程。
注意:因有四个参数A 、B 、C 、D,所以会得到多组解,任取其中一组即可。
对S 的法向量单位化得Ne(1,m,n)。
因OP 为平面S 的一条法线,由点O 及Ne 可确定OP 所在的直线方程:x -x p l =y -y p m =z -z pn (1)O 点坐标满足上式,有:x o -x p l =y o -y p m =z o -z pn(2)再由|OP|=R,可得:(x o -x p )2+(y o -y p )2+(z o -z p )2=R 2(3)其中:(x o ,y o ,z o )为P 点采样坐标联立式(2)、(3),可解出P 点的实际坐标值。
(3)两平面交线上的点位补偿原理:对于两平面交线L 上的点位P,当测头从任意方位碰触P 点时,测针球心O 与P 的连线OP 必垂直于交线L 。
点O 的坐标为采样得到的坐标值,若直线L 的方程可得,在笛卡尔坐标系中,由L 的方程和等式|OP|=R 联立,可解出点P 的实际坐标。
补偿实现:直线L 的一般方程即平面S1,S2方程的联立。
而平面S1,S2的方程可用前面介绍的最小二乘法原理推导,在此不再赘述。
设已分别求得为:S 1: l 1x +m 1y +n 1z +d 1=0S 2: l 2x +m 2y +n 2z +d 2=0联立以上两式即得直线L 的方程。
由|OP|=R,(x p -x o )2+(y p -y o )2+(z p -z o )2=R2(4)P 的实际坐标满足S1,S2的表达式,即有:l 1x p +m 1y p +n 1z p +d 1=0l 2x p +m 2y p +n 2z p +d 2=0将Xp,Yp 分别用Zp 表示,代入式(4)中,即可求得Zp 。
同理,可解出Xp,Yp 得到点P 的实际坐标值。
(4)圆孔的测量圆孔的测量一般分内测、外测。
如图6所示:图5 两平面交线上的点位示意图补偿原理:对于圆孔的测量,一般需要求出圆孔的半径与端面的孔心坐标值。
使用球头测针时,外测与内测的补偿差异仅仅在于孔半径加或减R(测针球头半径),孔心坐标值的确定方法是一致的。
理论上,三点即确定一个圆,但在实际测量时,由于测量误差的原因,必须测量多个点(大于三个)的坐标,由多个点的坐标,用最小二乘法原理导出圆的方程。
圆的方程导出后,圆半径和圆心坐标由方程很容易导出。
问题是:实际测孔时,由于测针碰触到的点位不一定位于同一个平面上,并且大多数图6 圆孔的内测与外测情况下,无论内测还是外测,都无法做到使测针碰触到的点位于同一个平面上,因此,必须首先确定圆孔的端面,然后,将测针碰触圆孔四周时采样得到的坐标,投影到此端面,最后由投影坐标值确定圆孔的方程,从而计算出孔心坐标及孔径。
图7 圆孔内(或外)壁上点到端面的投影补偿实现:见以上图示,平面S 为圆孔的端面,此端面的确定方法见前面相关叙述。
应注意的是:端面S 的方程与用采样坐标计算出的平面方程是不一致的,必须对计算出的平面方程沿法向补偿一个球头半径。
P 、Q 、R 为圆孔内壁相异三点,P 、Q 、R 分别为P 、Q 、R 在S 上的投影。
P 、Q 、R 三点的坐标值为测针采样坐标,为已知量。
设端面S 的方程已知,为:Ax+By+Cz+D =0;点P(xp,yp,zp),投影点P (xp ,yp ,zp );则由点P 在平面S 上和PP S 的法向分别有:Ax p +By p +Cz p +D =0x p -x p A =y p -y p B =z p -zp C联立以上两式,即可解出投影点P 的坐标值。
由多个投影点坐标,运用最小二乘法原理可导出圆孔的方程。
具体操作参照前面相关叙述。
4 应注意的问题将测头跟踪机制与各种情形下补偿技术结合,可大大减轻测量操作的复杂性,提高测量效率。
但在软件编制中应注意:测头跟踪机制的实现途径,应与三坐标测量机硬件的采样精度结合,跟踪队列的大小应适宜,太大不行,不便于维护;太小也不行,方位分析的准确度不够,会丢失精度。
究竟取多大,应在实测中反复比较,根据精度要求和测量效率权衡取舍。
当进行测量操作时,距离被测点位很近(小于1~2mm)时注意应尽量使测针垂直地碰触被测点位所在的切平面,因为在这种方式下时,方位分析的准确度最高。
否则,会导致较大的测量误差。
平面法向的确定与坐标系各轴的取向有关,一般地,由平面的方程可得到方向相反的两个单位法向量,究竟取哪一个,应特别注意,否则会在反方向补偿。
解决方法:可取任意一个三维跟踪坐标值,将各分量与求得的法向量的各分量比较,任意一维的正负与其一致的单位法向量即为所求。
参 考 文 献1 梁荣茗. 三坐标划线测量机的坐标系问题 . 实用测试技术 .1997,1,P31~P36.2 严蔚敏、吴伟民 数据结构 .清华大学出版社,1992,6,第二版.作者简介:李君波,1972年7月生,助理工程师。
1994年毕业于哈尔滨工程大学计算机系,现在华中理工大学计算机学院攻读硕士学位;研究方向intranet/internet 技术及数据库应用。