13.1 三阶非线性系统反演控制-智能控制——理论基础、算法设计与应用-刘金琨-清华大学出版社
智能控制(刘金琨)第3章

第三章
模糊控制的理论基础
第一节 概述 一、模糊控制的提出
以往的各种传统控制方法均是建立在 被控对象精确数学模型基础上的, 然而, 被控对象精确数学模型基础上的 , 然而 , 随着系统复杂程度的提高, 随着系统复杂程度的提高 , 将难以建立 系统的精确数学模型。 系统的精确数学模型。 在工程实践中,人们发现, 在工程实践中,人们发现,一个复杂 的控制系统可由一个操作人员凭着丰富 的实践经验得到满意的控制效果。 的实践经验得到满意的控制效果 。 这说 明 , 如果通过模拟人脑的思维方法设计 控制器, 可实现复杂系统的控制, 控制器 , 可实现复杂系统的控制 , 由此 产生了模糊控制。 产生了模糊控制。
A U B = µ AUB (u) = max(µ A (u), µ B (u)) = µ A (u) ∨ µ B (u)
(7)交集 若C为A和B的交集,则 的交集, C=A∩B 一般地, 一般地,
A I B = µ AIB (u) = min(µ A (u), µ B (u)) = µ A (u) ∧ µ B (u)
(1)交运算算子 设C=A∩B,有三种模糊算子: C=A∩B,有三种模糊算子: ① 模糊交算子
µ c ( x ) = Min {µ A ( x ), µ B ( x )}
② 代数积算子
µ c ( x) = µ A ( x) ⋅ µ B ( x)
③ 有界积算子
1 C A (u ) = 0
学习好 ∈ A 学习差 ∈ A
此时特征函数分别为(张三)=1 李四)=1 此时特征函数分别为(张三)=1,(李四)=1, ( 王五 )=1 。 这样就反映不出三者的差异 。 假 王五)=1 这样就反映不出三者的差异。 若采用模糊子集的概念, 选取[ 若采用模糊子集的概念 , 选取 [0 , 1] 区间上 的隶属度来表示它们属于“学习好” 的隶属度来表示它们属于 “学习好” 模糊子 集A的程度,就能够反映出三人的差异。 的程度,就能够反映出三人的差异。 采用隶属函数 µ A ( x) = x / 100 ,由三人的 成绩可知三人“学习好”的隶属度为(张 )=0 )=0 )=0 三 )=0.95 , ( 李 四 )=0.90 , ( 王 五 )=0.85 。 用 学习好”这一模糊子集A可表示为: “学习好”这一模糊子集A可表示为:
三阶非线性
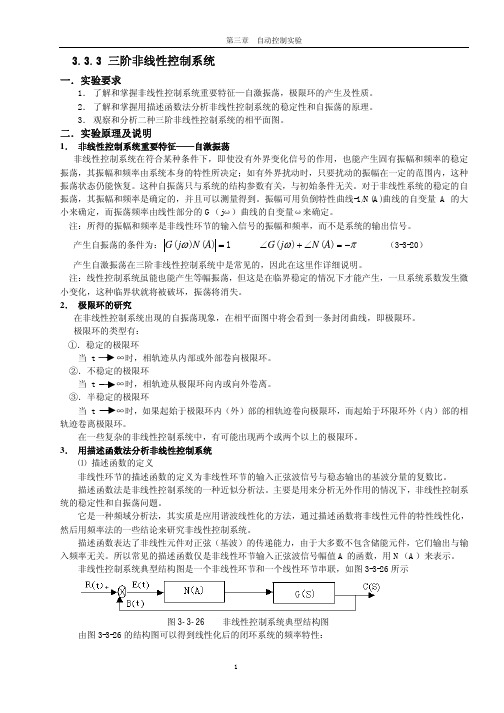
3.3.3 三阶非线性控制系统一.实验要求1. 了解和掌握非线性控制系统重要特征—自激振荡,极限环的产生及性质。
2. 了解和掌握用描述函数法分析非线性控制系统的稳定性和自振荡的原理。
3. 观察和分析二种三阶非线性控制系统的相平面图。
二.实验原理及说明1. 非线性控制系统重要特征——自激振荡非线性控制系统在符合某种条件下,即使没有外界变化信号的作用,也能产生固有振幅和频率的稳定振荡,其振幅和频率由系统本身的特性所决定;如有外界扰动时,只要扰动的振幅在一定的范围内,这种振荡状态仍能恢复。
这种自振荡只与系统的结构参数有关,与初始条件无关。
对于非线性系统的稳定的自振荡,其振幅和频率是确定的,并且可以测量得到。
振幅可用负倒特性曲线-1/N(A)曲线的自变量A 的大小来确定,而振荡频率由线性部分的G (j ω)曲线的自变量ω来确定。
注:所得的振幅和频率是非线性环节的输入信号的振幅和频率,而不是系统的输出信号。
产生自振荡的条件为:1)()(=A N j G ω πω−=∠+∠)()(A N j G (3-3-20)产生自激振荡在三阶非线性控制系统中是常见的,因此在这里作详细说明。
注:线性控制系统虽能也能产生等幅振荡,但这是在临界稳定的情况下才能产生,一旦系统系数发生微小变化,这种临界状就将被破坏,振荡将消失。
2. 极限环的研究在非线性控制系统出现的自振荡现象,在相平面图中将会看到一条封闭曲线,即极限环。
极限环的类型有: ①.稳定的极限环当∞时,相轨迹从内部或外部卷向极限环。
②.不稳定的极限环当③.半稳定的极限环当轨迹卷离极限环。
在一些复杂的非线性控制系统中,有可能出现两个或两个以上的极限环。
3. 用描述函数法分析非线性控制系统 ⑴ 描述函数的定义非线性环节的描述函数的定义为非线性环节的输入正弦波信号与稳态输出的基波分量的复数比。
描述函数法是非线性控制系统的一种近似分析法。
主要是用来分析无外作用的情况下,非线性控制系统的稳定性和自振荡问题。
三阶系统综合分析与设计
目录摘要 (1)1 设计内容 (2)1.1 设计题目 (2)1.2 设计任务 (2)2绘制三阶系统的根轨迹 (3)2.1 常规方法绘制根轨迹 (3)2.2用MATLAB绘制根轨迹 (4)3 不同条件下K的取值 (5)3.1 当-8为闭环系统的一个极点时,K的取值 (5)3.2 主导极点阻尼比为0.7时的k值 (6)4 求系统的稳态误差 (6)4.1 位置误差系数 (7)4.2 速度误差系数 (7)4.3 加速度误差系数 (8)4.4 输入信号为25.2)(1)(tttt r++=时的稳态误差 (8)5 绘制单位阶跃响应曲线 (8)6 频域特性分析 (9)6.1绘制Bode图和Nyquist曲线 (9)6.2相角裕度和幅值裕度 (12)7 加入非线性环节判断稳定性 (13)7.1 求死区特性环节的描述函数 (13)7.2 根据负倒描述函数和Nyquist图判断系统的稳定性 (14)8 设计体会 (15)参考文献 (17)摘要三阶系统是以三级微分方程为运动方程的控制系统。
在控制工程中,三阶系统非常普遍,其动态性能指标的确定是比较复杂。
在工程上常采用闭环主导极点的概念对三阶系统进行近似分析,或直接用MATLAB软件进行高阶系统分析。
在课程设计中,要掌握用MATLAB绘制闭环系统根轨迹和系统响应曲线,用系统的闭环主导极点来估算三系统的动态性能,以及在比较点及开环传递函数之间加一个非线性环节判断其稳定性。
1 设计内容1.1 设计题目三阶系统的综合分析和设计初始条件:某单位反馈系统结构图如图1-1所示:图1-1 图1-2 1.2 设计任务要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)1、试绘制随根轨迹2、当-8为闭环系统的一个极点时,K=?3、求取主导极点阻尼比为0.7时的K 值(以下K 取这个值)4、分别求取位置误差系数、速度误差系数、加速度误差系数及输入信号为25.2)(1)(t t t t r ++=单位阶跃信号、斜坡信号及单位加速度信号时的稳态误差5、用Matlab 绘制单位阶跃相应曲线6、绘制Bode 图和Nyquist 曲线,求取幅值裕度和相角裕度7、如在比较点及开环传递函数之间加1个死区非线性环节,如图1-2所示,其中2,10==k e ,试求取非线性环节的描述函数,并根据负倒描述函数和Nyquist 图判断系统的稳定性8、认真撰写课程设计报告。
三阶系统的一种变结构最倨控制律及应用
三阶系统的一种变结构最倨控制律及应用目前,由于技术的发展,越来越多的系统结构由三阶系统所取代,他们使用自适应控制或者自动控制系统来改变系统结构,以便满足其期望的输出要求。
为了更好地研究三阶系统的控制,最近有越来越多的研究人员开展了“变结构最短控制”的研究。
此研究涉及分析变结构控制系统,以了解其在求解最短控制问题上的能力。
本文介绍了一种变结构最短控制律,并对其在三阶系统上的应用进行了详细介绍。
一、变结构最短控制律变结构最短控制是一种最新的管理技术,现在已经成为研究最短控制的一个热门课题。
它的基本思想是,首先建立一个模型,该模型能够提取常见的系统变化,然后建立一个控制策略,该控制策略的激励可以实现对不同变化的兼容对处理,从而实现系统尽可能近地接近实际的最优解。
变结构最短控制律可以分为两个部分:系统参数及其状态空间模型和控制策略。
其中,系统参数及其状态空间模型是建立变结构最短控制的基础,它是对系统运行特性的抽象的描述,包括(1)系统的参数,如各类型参数和阻尼参数;(2)系统的状态空间,即该系统所能达到的最大输出空间。
而控制策略则是设计出一种有效的控制策略,以便根据系统参数及其状态空间模型,实现变结构最短控制,从而使其有效地追踪实际最优解。
二、三阶系统的变结构最短控制三阶系统是目前研究变结构最短控制的重要对象,其各项参数的变化可以通过变结构最短控制的方法来获取比原始控制方法更佳的效果。
三阶系统的变结构最短控制可以分为三个步骤:1.立系统参数及其状态空间模型:首先,定义三阶系统的参数,包括系统阻尼、质量、刚度及圆周位移等;然后,建立描述系统参数及其状态空间的数学模型,其中状态空间描述该系统所能达到的最大状态。
2.解控制策略:基于所建立的模型,设定控制变量,比如力的大小及其时间变化,针对每个变量,求解其最优控制策略,确定每个变量下应产生的力的大小及时间变化,从而确定最短控制时间曲线。
3.最短控制曲线控制三阶系统:基于以上控制策略,应用适当的控制手段,比如操纵力或者控制电压等,对三阶系统进行控制,从而把系统抓入求解最优解的最短控制时间曲线。
感应电动机非线性状态反馈控制算法

感应电动机非线性状态反馈控制算法
刘军;蒋金星
【期刊名称】《青岛科技大学学报(自然科学版)》
【年(卷),期】2007(028)005
【摘要】针对感应电动机调速系统中磁通和转速的动态解耦在实际实现时较难处理的问题,结合电动机数学模型,在非线性状态反馈控制算法的基础上,根据二阶系统性能响应指标提出了该控制算法中比例控制器增益的选择方法.由Matlab软件中的SimPower-Systems工具箱构建出仿真框架并把该算法嵌入其中进行仿真.结果表明,该方法与普通FOC矢量控制方法相比,转速和磁通的动态解耦效果明显改善.【总页数】4页(P439-442)
【作者】刘军;蒋金星
【作者单位】青岛科技大学,自动化与电子工程学院,山东,青岛,266042;青岛科技大学,自动化与电子工程学院,山东,青岛,266042
【正文语种】中文
【中图分类】TP273
【相关文献】
1.感应电动机两种非线性解耦控制方法的研究 [J], 张奇志;史富斌;刘光星;李琳
2.感应电动机非线性状态反馈控制系统自适应参数辨识研究 [J], 刘军;蒋金星;王晓燕
3.感应电动机非线性解耦控制的动态性能分析 [J], 吴忠;史永丽
4.基于双曲正切函数的非线性PI控制器及其在感应电动机矢量控制中的应用 [J],
姜向龙;赵金;万淑芸
5.感应电动机数学模型及非线性控制策略 [J], 王久和;黄立培;李华德
因版权原因,仅展示原文概要,查看原文内容请购买。
自动控制原理课程设计--三阶系统分析与校正
自动控制原理课程设计--三阶系统分析与校正
随着工业化日益发展,自动控制相关的技术日趋重要,三阶系统分析与校正也变得更加重要了。
三阶系统是一种外增调控系统,具有以下特征:它具有反馈回路,并以反应延迟为组件。
在有效的调节过程中,三阶系统的表现更佳,能够更有效地进行调节,满足较高的精度要求。
因此,三阶系统分析与校正一直是自动控制原理书中重要的课程,也是许多工业相关专业常安排的课程。
三阶系统分析与校正课程的任务非常重要,主要包括三阶系统的建模、解析与数值分析,以及信号处理中系统的校正。
首先,要了解三阶系统的定性模型,以及系统的动态特性,掌握三阶系统的时延与振荡的影响原则。
其次,要掌握解析法及数值法,能够敏锐地指出未知系统的动态特性,分析系统的调节误差。
最后,要理解三阶系统的校正原理,掌握系统校正过程中的参数估计方法与滤波技术。
在实际应用中,能够用校正方法有效地改善系统的性能。
此外,三阶系统分析与校正还为许多智能技术与机器学习提供了坚实的把柄,比如自动机器人与机器视觉、智能控制与自主导航等先进技术。
在应用广泛的同时,三阶系统分析与校正课程也一直是重要的技术训练课程,对不同领域的工程师都有着十分重要作用。
通过学习三阶系统分析与校正课程,学生们将掌握分析、计算以及改善三阶系统性能的基础技术,更深入地认识自动控制的相关原理,并能灵活运用,能够更好地应用到实际工程中。
学习课程的重点,是培养学生的独立解决工程问题的分析、解决能力,帮助学生将自动控制原理技术付诸实施,最终让这些技术能够更好地服务于工业发展中。
智能控制第1讲 智能控制概论
Data, Information, Knowledge, IntelligenceIntelligence Knowledge Information Data房间温度高 解决温度 高的办法温度高原因通风量不足增大通风量房间温度 32℃理想温度 23℃Data, Information, Knowledge, IntelligenceIntelligence KnowledgeInformation Data传统控制面临的挑战 实际系统由于存在复杂性、非线性、时变 性、不确定性和不完全性等,一般无法获得精 确的数学模型。
应用传统控制理论进行控制必须提出并遵循 一些比较苛刻的线性化假设,而这些假设在应 用中往往与实际情况不相吻合。
传统控制面临的挑战 传统控制方法在解决大范围变工况、异常 工况等问题方面往往不尽人意。
环境和被控对象的未知和不确定性,导致无 法建立模型。
9 传统控制往往不能满足某些系统的性能要 求。
控制科学发展过程进展方向最优控制 确定性反馈控制 开环控制 智能控制 自学习控制自组织控制 自适应控制 鲁棒控制 随机控制对象的复杂性智能控制的发展¾ 1985 年 8月,IEEE在纽约召开第一届智能控制学术 研讨会,主题:智能控制原理和智能控制系统。
会议 决定在 IEEE CSS 下设 IEEE 智能控制专业委员会。
这 标志着智能控制这一新兴学科研究领域的正式诞生。
¾ 1987 年 1 月 , 美 国 费 城 , 第 一 次 智 能 控 制 国 际 会 议,IEEE CSS与CS两学会主办; ¾ 1987 年以来,一些国际学术组织,如 IEEE 、 IFAC 等定期或不定期举办各类有关智能控制的国际学术会 议或研讨会,一定程度上反映了智能控制发展的好势 头。
智能控制的发展¾ 1991年7月,中国人工智能学会成立。
¾ 1993年7月,成都,中国人工智能学会智能机器人专 业委员会成立大会暨首届学术会议。
智能控制-刘金琨编著PPT第6章
术实现;
(5)能进行学习,以适应环境的变化。
6.6 神经网络控制的研究领域
1 基于神经网络的系统辨识 ① 将神经网络作为被辨识系统的模型,可在已知
常规模型结构的情况下,估计模型的参数。
② 利用神经网络的线性、非线性特性,可建立线
性、非线性系统的静态、动态、逆动态及预测
模型,实现非线性系统的建模和辨识。
人恼的生理学和心理学着手,通过人工
模拟人脑的工作机理来实现机器的部分
智能行为。
人工神经网络(简称神经网络, Neural Network )是模拟人脑思维方 式的数学模型。 神经网络是在现代生物学研究人脑组 织成果的基础上提出的,用来模拟人类大 脑神经网络的结构和行为。神经网络反映 了人脑功能的基本特征,如并行信息处理 、学习、联想、模式分类、记忆等。
1982 年 , 物 理 学 家 Hoppield 提 出 了 Hoppield 神经网络模型,该模型通过引入 能量函数,实现了问题优化求解, 1984 年 他用此模型成功地解决了旅行商路径优化 问题(TSP)。 在1986年,在Rumelhart和McCelland等出 版《Parallel Distributed Processing》一书 ,提出了一种著名的多层神经网络模型, 即BP网络。该网络是迄今为止应用最普遍 的神经网络。
6.4.2 Delta(δ )学习规则
假设误差准则函数为:
1 E 2
p 1
P
(d p y p ) 2
E
p 1
P
p
其中, d p 代表期望的输出(教师信号);y p 为 网络的实际输出, y p f (W Xp ) ;W 为网络所有权 值组成的向量:
W w0, w1, , wn T
三阶系统综合分析及设计
三阶系统综合分析及设计三阶系统是指系统的传递函数中包含三个一阶导数的系统。
它是一种常见的动态系统模型,广泛应用于控制系统分析与设计中。
系统分析与设计是指对一个系统进行调查、研究和设计的过程。
对于三阶系统的分析与设计,可以从以下几个方面进行综合分析与设计。
首先,需要对三阶系统进行数学建模。
数学模型是对实际系统进行描述的形式化表示。
对于三阶系统,可以通过从实际物理模型出发,通过系统边界的确定、基本假设的制定、动态方程的建立等步骤,得到系统的数学模型。
例如,对于一个机械振动系统,可以根据牛顿第二定律和阻尼定律,建立系统的运动方程。
其次,需要对三阶系统进行分析。
系统分析是对系统行为和性能的研究。
对于三阶系统,可以通过传递函数的频率响应、稳定性、阶跃响应、频率响应等进行分析。
例如,可以通过求解传递函数的极点和零点,判断系统的稳定性;通过求解传递函数的阶跃响应,了解系统的过渡过程特性。
然后,可以进行三阶系统的控制器设计。
控制器设计是为了实现对系统的特定要求或目标,通过调整控制器参数来改变系统的行为。
对于三阶系统,可以根据控制需求,设计合适的控制器类型(比如PID控制器、模糊控制器、自适应控制器等),并进行参数调整。
例如,可以通过根轨迹设计法或频率域指标设计法,调整PID控制器的参数。
此外,还可以进行三阶系统的性能评估。
性能评估是对系统性能进行定量评价的过程。
对于三阶系统,可以使用多种指标来评估其性能,如稳态误差、一致性、灵敏度等。
例如,可以计算系统的稳态误差,评估系统对于输入信号的跟踪性能;可以通过灵敏度函数,评估系统对于参数扰动和测量噪声的敏感性。
最后,需要对三阶系统进行仿真与实验验证。
仿真与实验验证是对系统理论设计进行实际验证的过程。
可以利用计算机软件(如MATLAB、Simulink)进行仿真,通过输入特定信号,观察系统的响应;也可以通过实验装置,在实际系统中搭建相应的电路、控制算法等进行验证。
通过仿真与实验验证,可以验证系统设计的有效性,同时根据实际情况对系统进行调整与优化。
非线性系统控制方法的反演技术研究
非线性系统控制方法的反演技术研究摘要:随着科技的进步和应用范畴的扩大,非线性系统控制日益成为研究的热点。
然而,非线性系统的复杂性和不确定性给控制带来了很大的挑战。
为了克服这些困难,反演技术作为一种有效的非线性控制方法被广泛应用于工业过程和自动化系统。
本文将研究非线性系统的反演方法,包括基于模型的反演和自适应反演方法,并提出了未来研究的方向。
1. 引言非线性系统的控制一直是控制理论研究的重点和难点之一。
非线性系统存在着复杂的动力学特性、参数不确定性和外部扰动等问题,传统的线性控制方法难以满足实际需求。
因此,需要发展新的、有效的非线性控制方法来提高系统的稳定性、性能和鲁棒性。
2. 反演技术的基本原理反演技术是一种基于系统模型的非线性控制方法,通过将系统模型反演,从而实现输出与期望输出的一致性。
它的基本原理是通过反演算子将系统的输出映射到控制输入空间,实现对系统的逆向控制。
3. 基于模型的反演方法基于模型的反演方法是利用已知系统模型进行反演控制的一种方法。
通过建立系统的数学模型和特性方程,可以利用数学方法推导出反演控制器。
这种方法的优点是可以实现对系统的精确控制,但对系统模型的准确性和完备性有一定要求。
4. 自适应反演方法自适应反演方法是一种可以自动调整反演控制器参数的方法。
通过利用适应性算法来实现反演器参数的在线调整,可以在不完全了解系统内部动态特性的情况下实现鲁棒控制。
这种方法适用于系统模型未知或参数变化较大的情况。
5. 非线性系统的反演技术在实际应用中的研究进展非线性系统的反演技术已经在许多实际应用中得到了广泛的应用。
例如,在工业过程中,非线性系统的反演技术可以实现对复杂工艺过程的精确控制;在自动化系统中,反演技术可以用于控制机器人的动力学行为。
这些应用表明非线性系统的反演技术在实际控制中具有很大的潜力。
6. 非线性系统的反演技术研究的未来方向尽管非线性系统的反演技术已经取得了一些重要的进展,但在实际应用中仍然存在一些挑战和不足之处。