基于加速传感器速度与路程的测量
基于单个三轴加速传感器的人体运动状态识别
基于单个三轴加速传感器的人体运动状态识别蔡培君【摘要】Cognition of human movement state is the base of elder people movement monitor system .Human movement state is involved two aspect:rest and active.Active includes working, running, jumping and so on.Human acceleration is detected re-al-timely by triaxial acceleration sensor, extracting variation of the amplitude of acceleration as characteristic of human movement detection.Building AR(1) model of human movement and using Kalman filter algorithm, adaptive threshold and decision tree to distinguish working and running.%人体运动状态识别是老人运动状态监测系统的基础。
人体运动状态包括运动和休息两个方面,其中运动状态又可分为走、跑、跳和跌倒等。
本文利用三轴加速传感器对人体加速度进行实时检测,提取加速度幅值变化量,并将其作为人体运动状态检测的特征值,构建人体运动状态一阶自回归模型,利用卡尔曼滤波、自适应阈值法以及决策树对走和跑进行识别。
【期刊名称】《安庆师范学院学报(自然科学版)》【年(卷),期】2016(000)001【总页数】4页(P83-86)【关键词】运动状态;三轴加速传感器;卡尔曼滤波;决策树【作者】蔡培君【作者单位】安徽大学江淮学院计算机系,安徽合肥230031【正文语种】中文【中图分类】TP301.6人体运动状态识别是老人运动状态监测系统的基础。
基于压电加速度计速度测量信号调理电路设计

课程设计报告题目基于单片机的压电加速度传感器低频信号采集系统的设计2014-2015 第二学期专业班级2012级电气5班姓名赵倩学号************指导教师马鸣教学单位电子电气工程学院2015年7月6日课程设计任务书一、压电式加速度传感器的概要 (4)二、信号采集系统的总设计方案 (5)三、信号采集系统分析 (6)1、电荷转换部分: (6)2、适调放大部分 (6)3、低通滤波部分: (7)4、输出放大部分 (7)5、积分器部分: (8)四、单片机软件设计 (8)五、Multisim仿真分析 (10)1.仿真电路图 (10)2.仿真波形及分析 (11)六、误差分析 (11)1、连接电缆的固定 (11)2、接地点选择 (12)3、湿度的影响 (12)4、环境温度的影响 (12)七、改进措施 (12)六、心得体会 (12)七、参考文献 (13)前言在数据采集领域,NI作为虚拟仪器技术的开创者和领导者,也是基于PC的数据采集产品的领导者,为用户提供了最为广泛的数据采集设备选择。
但配备NI公司的数据采集硬件及软件比较昂贵,并且对于本文中在实验室进行的压电加速度传感器信号的采集,其输出模拟量为缓变低频信号,采用总线型。
压电式加速度传感器是以压电原材料为转换元件,输出与加速度成正比的电荷或电压量的装置。
由于它具有结构简单、工作可靠等性能,目前已成为冲击振动测试技术中使用广泛的一种传感器。
世界各国作为量值传递标准的高频和中频基准的标准加速度传感器,都是压电式的。
本文基于上述特点对压电加速度传感器低频信号进行了分析,同时在参阅大量文献资料的情况下设计了基于单片机的压电加速度传感器低频信号的采集系统。
基于单片机的压电加速度传感器低频信号采集系统的设计一、压电式加速度传感器的概要压电式加速度传感器是一种典型的自发式传感器,又称压电加速度计,它也属于惯性式传感器。
它是以某些晶体受力后在其表面产生电荷的电压效应为转换原理的传感器。
速度及加速度检测磁电式速度传感器测量转速(优选)word资料

速度及加速度检测磁电式速度传感器测量转速(优选)word资料项目6 速度及加速度检测——磁电式速度传感器测量转速一、教学目的与要求1.理解磁电感应式传感器的工作原理。
2.掌握磁电感应式传感器的特性。
3.掌握磁电感应式传感器的结构形式 4.掌握磁电感应式传感器的转换电路 5.理解磁电感应式传感器的的各种应用原理。
二、教学重点与难点(一)重点: 磁电感应式传感器的工作原理 磁电感应式传感器的基本特性 磁电感应式传感器的测量电路(二)难点:磁电感应式传感器的非线性误差分析与温度误差分析。
三、教学工具 多媒体 磁电感应式传感器 四、课时安排 理论4学时,实践2学时 五、教学过程一、磁电式传感器工作原理1、原理:根据电磁感应定律,当w 匝线圈在恒定磁场内运动时,设穿过线圈的磁通为Φ,则线圈内的感应电势E 与磁通变化率d Φ/dt 有如下关系:2、分类:变磁通式和恒磁通式。
即动圈式传感器和磁阻式传感器。
动圈式磁电感应式传感器:这类传感器的基本形式是速度传感器,能直接测量线速度或角速度,还可以用来测量位移或加速度。
由上述工作原理可知,磁电感应式传感器只适用于动态测量。
(1)动圈式磁电感应式传感器可以分为线速度型和角速度型等。
如下图所示。
重难点解决方案:在课堂教学中通过合理的提问、举例、对比分析来突出重点、突破难点。
(2)磁阻式传感器:又称为变磁通式传感器或变气隙式传感器,常用来测量旋转物体的角速度。
可分为开路变磁通式传感器和闭合磁路变磁通式传感器。
变磁通式传感器对环境条件要求不高,能在-150~+90℃的温度下工作,也能在油、水雾、灰尘等条件下工作。
但它的工作频率下限较高,约为50Hz,上限可达100Hz。
图5-1是变磁通式磁电传感器,用来测量旋转物体的角速度。
图5-1(a)为开磁路变磁通式:线圈、磁铁静止不动,测量齿轮安装在被测旋转体上,随之一起转动。
每转动一个齿,齿轮凹凸引起磁路磁阻变化一次,磁通也就变化一次,线圈中产生感应电势,其变化频率等于被测转速与测量齿轮齿数的乘积。
基于加速度传感器的速度及路程测量系统
Sk
h ( f ( xk ) 4 f ( x 1 ) f ( xk 1 )) k 6 2
Simpson 公式中每一个小微段用到三个点积分,所以我们积分时对每三个点进行积分从 而得到如下的公式
其中
h
是采样周期的二倍,
n
a 为采集到的加速度,n 为信息处理的周期。
n/ 2 n/ 2 h Vt Vk (a0 4 a2 k 2 a2 k 1 an ) 6 k 0 k 1 k 1
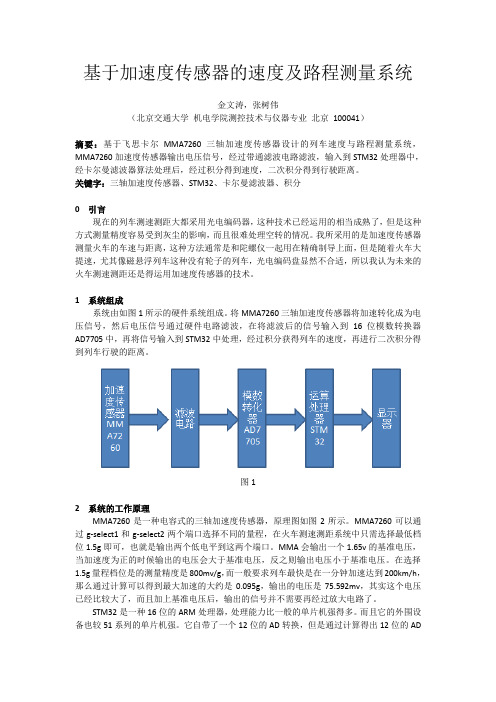
图1 2 系统的工作原理 MMA7260 是一种电容式的三轴加速度传感器,原理图如图 2 所示。MMA7260 可以通 过 g-select1 和 g-select2 两个端口选择不同的量程,在火车测速测距系统中只需选择最低档 位 1.5g 即可,也就是输出两个低电平到这两个端口。MMA 会输出一个 1.65v 的基准电压, 当加速度为正的时候输出的电压会大于基准电压,反之则输出电压小于基准电压。在选择 1.5g 量程档位是的测量精度是 800mv/g, 而一般要求列车最快是在一分钟加速达到 200km/h, 那么通过计算可以得到最大加速的大约是 0.095g,输出的电压是 75.592mv,其实这个电压 已经比较大了,而且加上基准电压后,输出的信号并不需要再经过放大电路了。 STM32 是一种 16 位的 ARM 处理器, 处理能力比一般的单片机强得多。 而且它的外围设 备也较 51 系列的单片机强。它自带了一个 12 位的 AD 转换,但是通过计算得出 12 位的 AD
图2
图3 系统软件流程图 软件系统采取的是卡尔曼滤波器对数据进行软件滤波,然后再利用辛普森公式进行积 分,软件流程图如图 4 所示。卡尔曼滤波器(Kalman Filter)是一个最优化自回归数据处理 算法(optimal recursive data processing algorithm) 。对于解决很大部分的问题,他是最优, 效率最高甚至是最有用的。他的广泛应用已经超过 30 年,包括机器人导航,控制,传感器 数据融合甚至在军事方面的雷达系统以及导弹追踪等等。近年来更被应用于计算机图像处 理,例如头脸识别,图像分割,图像边缘检测等等。 现设线性时变系统的离散状态防城和观测方程为: X(k) = F(k,k-1)· X(k-1)+T(k,k-1)· U(k-1) Y(k) = H(k)· X(k)+N(k) 3 其中 X(k)和 Y(k)分别是 k 时刻的状态矢量和观测矢量 F(k,k-1)为状态转移矩阵 U(k)为 k 时刻动态噪声 T(k,k-1)为系统控制矩阵 H(k)为 k 时刻观测矩阵 N(k)为 k 时刻观测噪声 则卡尔曼滤波的算法流程为: 预估计 X(k)^= F(k,k-1)· X(k-1) 计算预估计协方差矩阵 C(k)^=F(k,k-1)×C(k)×F(k,k-1)'+T(k,k-1)×Q(k)×T(k,k-1)' Q(k) = U(k)×U(k)' 计算卡尔曼增益矩阵 K(k) = C(k)^×H(k)'×[H(k)×C(k)^×H(k)'+R(k)]^(-1) R(k) = N(k)×N(k)' 更新估计 X(k)~=X(k)^+K(k)×[Y(k)-H(k)×X(k)^] 计算更新后估计协防差矩阵 C(k)~ = [I-K(k)×H(k)]×C(k)^×[I-K(k)×H(k)]'+K(k)×R(k)×K(k)' X(k+1) = X(k)~ C(k+1) = C(k)~ 重复以上步骤 在对加速度信号进行处理之后我们得到了一组可以积分的加速度信号。 为了获得比较 高的积分精度,我们采用了 Simpson 公式进积分 在每个小区间 xk , xk 1 使用 Simpson 公式
关于基于单片机车速里程表文献综述

摘要里程表广泛应用于各类机车,传统的机械式里程表虽然稳定可靠,但功能单一、易受磨损。
随着电子技术的迅猛发展,电子式里程表得以广泛应用,现在很多轿车仪表已经使用电子车速里程表,本设计介绍一种基于单片机的智能电子里程表。
该电子式里程表是一种数字式仪表,主要由车速表和里程表两部分组成,其传感器采用无接触测量的光电传感器。
它不仅可显示车辆行驶的总里程,也可显示一段时间的阶段里程,还可显示车速,以及实现超速报警等功能,并具有较强的再开发能力。
它的实现方式是,通过安装在汽车转轴上的测量盘,用霍尔传感器检测使转速物理量变换成脉冲电量,通过单片机测量产生脉冲的频率就可以得出圆盘的转速,再通过计算,从而得出里程、车速的信息,并由LED显示器显示出来。
并且该电子式里程表累积的里程数字存储在非易失性的EEPROM存储器内,在无电状态下数据也能保存。
关键词:AT89S51单片机;里程表;霍尔传感器;LED显示器;存储器一、电子车速里程表研究现状和发展趋势及意义我国汽车工业走过了五十年的历程,与国际发达国家汽车工业相比,电子技术水平相对比较落后,提高国产汽车的电子技术水平,增加汽车电子装备的数量,促进汽车电子化是夺取未来汽车市场的关键,提高我国的汽车电子技术已势在必行。
随着中国的复关,国外汽车零部件厂商也大举进入中国参与竞争。
电子式仪表及新型传感器是各类车型汽车的首选配套产品,通用性好,市场前景广阔。
目前国外汽车车速里程表已广泛采用电子式机芯结构,而国内汽车仪表一直是机械式车速里程表的天下,少数采用动圈式电子仪表,通过大量市场调研,我们清楚地看到进入20世纪以来汽车工业迅速发展,而电子产品则是汽车提高技术含量的晴雨表。
国外电子产品占整车成本的30%,然而我国汽车行业起步较晚,技术十分落后,电子产品仅占整车成本的5%。
例如国外汽车早已装配电子式仪表,而我国汽车仍在应用传统的机械仪表,可靠性很差。
目前汽车仪表控制电子化是一种发展趋势,由先进的传感器与显示装置构成的电子仪表已开始全面取代传统的机电式仪表,成为现代汽车的明显标志。
基于加速度传感器的油井功图位移测量的算法设计与优化

基于GPS与加速计测量车速系统
基于GPS与加速计测量车速系统变速器各挡传动比的确定初选传动比: 设10挡为直接挡,则m in g i =1m ax a U = 0.377min i i r n g p式中:m axa U —最高车速pn —发动机最大功率转速r —车轮半径m ing i —变速器最小传动比0i—主减速器传动比 maxe T =9549×pe n P maxα (转矩适应系数α=1.1~1.3)所以,p n =9549×1711913.1⨯=231.32r/min 由上述两两式取p n =2400 r/mini =0.377×maxmin a g p u i r n =5.107双曲面主减速器,当0i≤6时,取η=90%1g i 在5.0~8.0范围,g η=96%, T η=η×T η=90%×96%=86.4% 最大传动比1g i 的选择:①满足最大爬坡度。
根据汽车行驶方程式dt dum Gi u A C Gf ri i T a D Tg δη+++=20emax 15.21汽车以一挡在无风、沥青混凝土干路面行驶,公式简化为ααηsin cos 0emax G Gf ri i T Tg +=即,()Te g i Tf Gr i ηαα0max 1sin cos +≥式中:G —作用在汽车上的重力,mg G =,m —汽车质量,g —重力加速度,max e T —发动机最大转矩,max e T =1025N.m ; 0i —主减速器传动比,0i =5.107T η—传动系效率,T η=86.4%;r —车轮半径,r =0.508;f —滚动阻力系数,对于货车取f =0.02;α—爬坡度,取α=16.7°计算得≥1g i 8.43 ②满足附着条件。
≤ri i T Tg η01emax z2F ·φ在沥青混凝土干路面,φ=0.7~0.8,取φ=0.75 即1g i ≤12.38 得8.43≤1g i ≤12.38; 传动比取1g i =7.45 其他各挡传动比的确定: 按等比级数原则,式中:q —常数,也就是各挡之间的公比;因此,各挡的传动比为:1n 1-=g i q =945.7 =1.251g i =7.45,2g i =5.96 ,3g i =4.77,4g i =3.81,5g i =3.05, 6g i =2.44 ,7g i =1.95,8g i =1.56,9g i =1.25,10g i =1齿轮参数模数对货车,减小质量比减小噪声更重要,故齿轮应该选用大些的模数;从工艺方面考虑,各挡齿轮应该选用一种模数。
传感器测加速度
传感器检测加速度加速度传感器是用来将加速度这一物理信号转变成便于测量的电信号的测试仪器。
它是工业、国防等许多领域中进行冲击、振动测量常用的测试仪器。
本文着重介绍三种加速度传感器:MEMSIC加速度传感器、压电式加速度传感器、差动变压器式加速度传感器。
一. MEMSIC加速度传感器一个被放置在硅芯片中央的热源在一个空腔中产生一个悬浮的热气团,同时由铝和多晶硅组成的热电耦组被等距离对称地放置在热源的四个方向,在未受到加速度或水平放置时,温度的下降陡度是以热源为中心完全对称的,此时所有四个热电耦组因感应温度而产生的电压是相同的,如图1。
图 1 传感器检测原理垂直剖面图由于自由对流热场的传递性,任何方向的加速度都会扰乱热场的轮廓,从而导致其不对称,此时四个热电耦组的输出电压会出现差异,而这热电耦组输出电压的差异是直接与所感应的加速度成比例的,在加速度传感器内部有两条完全相同的加速度信号传输路径,一条是用于测量X轴上所感应的加速度,另一条则用于测量Y 轴上所感应的加速度,如图2。
图 2 内部功能方块图MEMSIC加速度传感器的优点:MEMSIC 器件是基于单片CMOS 集成电路制造工艺而生产出来的一个完整的双轴加速度测量系统,就像其它加速度传感器有重力块一样MEMSIC 器件是以可移动的热对流小气团作为重力块,器件通过测量由加速度引起的内部温度的变化来测量加速度。
MEMSIC传感器中的质量块是气体,气态的质量块同传统的实体质量块相比具有很大的优势MEMSIC的器件不存在电容式传感器所存在的粘连颗粒等问题同时能抵抗50000g的冲击。
这使得MEMSIC器件的次品率和故障率很低,通过测量温度变化来确定加速度的变化。
MEMSIC加速度传感器的缺点:测量范围比较的小,只适用于小型器件的应用,精度也不能达到非常精确的程度。
MEMSIC加速度传感器最大可以测量范围是1g到100g,除了动态加速度,如震动MEMSIC器件还可以测静态加速度,如重力加速度。
基于电磁传感器的特殊环境高速运动目标速度测量
訇 化
2 实验及实验结果
21 测试 系统 .
211测试系统配置 .. 测 试 系统 完 成 加 速 器 内弹 道 的 速 度 测 量 ,加
速 器 及 测速 系统 见 图 2 ,主 要 由加 速 管 、模 型 、
测 试 窗 口、 传 感 器 及 放 大 数 采 装 置 组 成 。 目前 , 共 有 1 个 测试 站 ,测试 站依 次 按 0 一0 1 1 #编号 ,其 中0 位 于 入 口处 。1 个 电磁 传 感 器 与 1 1 5通 道 的
从 图 3前两 个周 期 中可 以看 出,在 测量 0站和
1 问运 动 目标 的运 动 时 间时需 要两 站 的 电压信 号 站 过 零 点 即 Y=f( = 0 ,这 样 才能 测 得 比较 精确 的
图4 位 置一 度 曲线 速
旦 目D g一 o
运 动时 间 。当 电压时 间 曲线经过 零 点时 ,这 种情 况
速 度是一 项 至关重 要 的内容 ,其 中采用 线 圈靶 来 测
量弹 丸速 度是 一种 常用 的方法 。在 弹丸 速度 测量 过
电流 ,可 实现 模型 的探 测和 精确 定位 。 12 电磁 感应 线 圈 . 缠绕在 管路 上 的检测线 圈是 整个 系统的核 心元
件 ,它担 负着拾 取速 度信号并 传递 给监 测仪器 的任 务 ,线 圈 的性 能也 决 定 了该 传感 器 的检 测 灵敏 度 。
下 的时 间很 好测 量 ,可 以很 方便 的得 到它 的运动 时
路时 ,制约 导 线本身 的 电阻不大 ,可 略去 ,电容也
因容 抗太小 而 略去 。当频 率增加 ,分布 电容 的作用 就 比较 突 出。 因此 ,为提高 频率应 选用 介电常 数小 的绝缘 介质 和绕 制方法 。导 线选用 细漆 包线可 有效 提 高 线 圈 的 品质 因数 ,则 电感线 圈 功率 损耗 越 小 ,
加速度计和陀螺仪传感器原理检测及应用
加速度计和陀螺仪传感器原理检测及应用加速度计的原理是基于质量的惯性。
它包含一个质量块,当物体受到加速度时,质量块会受到力的作用,从而产生位移。
位移可以通过电容、压电或压阻等方式检测。
根据牛顿第二定律F=ma,可以通过测量质量块上的力来计算出加速度。
陀螺仪的原理是基于转子的旋转。
转子在其轴向上旋转时,会受到科里奥利力的作用,导致转子发生位移。
位移可以通过电容、压电或压阻等方式检测。
根据角动量守恒定律L=Iω,可以通过测量转子上的力矩和惯性矩来计算出角速度。
在使用加速度计和陀螺仪进行检测时,需要注意其精度和误差。
加速度计的误差包括基线误差(如零偏误差和灵敏度误差)和非线性误差。
陀螺仪的误差包括漂移误差和振动误差。
针对这些误差,可以通过校准、信号处理和滤波等手段进行补偿和消除。
加速度计和陀螺仪的应用非常广泛。
加速度计可以用于物体的运动检测与测量,例如汽车碰撞检测、地震检测、体育运动分析等。
陀螺仪可以用于物体的姿态估计与控制,例如飞行器姿态控制、虚拟现实头显的运动跟踪等。
同时,加速度计和陀螺仪也常常结合使用,以提供更精确的运动状态信息。
总之,加速度计和陀螺仪是两种常用的传感器,用于测量物体的加速度和角速度。
它们的原理基于质量的惯性和转子的旋转,通过检测位移来计算出加速度和角速度。
在应用中,需要注意其精度和误差,并根据具体需求进行校准和补偿。
加速度计和陀螺仪在各种领域都有广泛的应用,如车辆安全、地震监测和虚拟现实等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
加速度传感器测量系统
周搏涛(自动化2班2010073020017)
摘要:基于飞思卡尔MMA7260三轴加速度传感器设计的列车速度与路程测量系统,
MMA7260加速度传感器输出电压信号,经过带通滤波电路滤波,输入到STM32处理器中,经卡尔曼滤波器算法处理后,经过积分得到速度,二次积分得到行驶距离。
关键字:三轴加速度传感器、STM32、卡尔曼滤波器、积分
0 引言
现在的列车测速测距大都采用光电编码器,这种技术已经运用的相当成熟了,但是这种方式测量精度容易受到灰尘的影响,而且很难处理空转的情况。
我所采用的是加速度传感器测量火车的车速与距离,这种方法通常是和陀螺仪一起用在精确制导上面,但是随着火车大提速,尤其像磁悬浮列车这种没有轮子的列车,光电编码盘显然不合适,所以我认为未来的火车测速测距还是得运用加速度传感器的技术。
1 系统组成
系统由如图1所示的硬件系统组成。
将MMA7260三轴加速度传感器将加速转化成为电压信号,然后电压信号通过硬件电路滤波,在将滤波后的信号输入到16位模数转换器AD7705中,再将信号输入到STM32中处理,经过积分获得列车的速度,再进行二次积分得到列车行驶的距离。
2 系统的工作原理
MMA7260是一种电容式的三轴加速度传感器,原理图如图2所示。
MMA7260可以通过
g-select1和g-select2两个端口选择不同的量程,在火车测速测距系统中只需选择最低档位1.5g 即可,也就是输出两个低电平到这两个端口。
MMA会输出一个1.65v的基准电压,当加速度为正的时候输出的电压会大于基准电压,反之则输出电压小于基准电压。
在选择1.5g量程档位是的测量精度是800mv/g,而一般要求列车最快是在一分钟加速达到200km/h,那么通过计算可以得到最大加速的大约是0.095g,输出的电压是75.592mv,其实这个电压已经比较大了,而且加上基准电压后,输出的信号并不需要再经过放大电路了。
STM32是一种16位的ARM处理器,处理能力比一般的单片机强得多。
而且它的外围设备也较51系列的单片机强。
它自带了一个12位的AD转换,但是通过计算得出12位的AD
转换器每mv只能表示0.0159m/s2,这不能满足加速度传感器的转换要求。
所以我们选择了一个16位的模数转换器AD7705,16位的模数转换器能够达到的精度是0.0009346m/s2/mv,这样的精度已经足以满足系统的要求了。
滤波电路采取的是带通滤波,滤波电路图如图3所示。
先是使信号通过一个低通滤波电路,然后再通过一个高通滤波电路,低通滤波频率为
通过将加速度传感器的一轴定位始终和铁轨所在的平面平行,就可以测得火车在前进方向上的加速度,而且不论是上坡还是下坡,均不受影响。
而且在火车转弯的时候,因为法向加速的并不影响火车速度的大小。
而且利用加速度传感器测量火车的速度和路程不用考虑车轮是否空转、倒转。
利用STM32控制器中断程序,编程将加速度积分就可以得到火车的速度,再将速度进行积分就可以得到火车行驶的路程。
图2
图3
3 系统软件流程图
软件系统采取的是卡尔曼滤波器对数据进行软件滤波,然后再利用辛普森公式进行积分,软件流程图如图4 所示。
卡尔曼滤波器(Kalman Filter)是一个最优化自回归数据处理算法(optimal recursive data processing algorithm)。
对于解决很大部分的问题,他是最优,效率最高甚至是最有用的。
他的广泛应用已经超过30 年,包括机器人导航,控制,传感器数据融合甚至在军事方面的雷达系统以及导弹追踪等等。
近年来更被应用于计算机图像处理,例如头脸识别,图像分割,图像边缘检测等等。
现设线性时变系统的离散状态防城和观测方程为:
X(k) = F(k,k-1)·X(k-1)+T(k,k-1)·U(k-1)
Y(k) = H(k)·X(k)+N(k)
其中
X(k)和Y(k)分别是k 时刻的状态矢量和观测矢量
F(k,k-1)为状态转移矩阵
U(k)为k 时刻动态噪声
T(k,k-1)为系统控制矩阵
H(k)为k 时刻观测矩阵
N(k)为k 时刻观测噪声
则卡尔曼滤波的算法流程为:
预估计X(k)^= F(k,k-1)·X(k-1)
计算预估计协方差矩阵C(k)^=F(k,k-1)×C(k)×F(k,k-1)'+T(k,k-1)×Q(k)×T(k,k-1)' Q(k) = U(k)×U(k)'
计算卡尔曼增益矩阵K(k) = C(k)^×H(k)'×[H(k)×C(k)^×H(k)'+R(k)]^(-1) R(k) = N(k)×N(k)'
更新估计X(k)~=X(k)^+K(k)×[Y(k)-H(k)×X(k)^]
计算更新后估计协防差矩阵C(k)~ = [I-K(k)×H(k)]×C(k)^×[I-K(k)×H(k)]'+K(k)×R(k)×K(k)'
X(k+1) = X(k)~ C(k+1) = C(k)~ 重复以上步骤
在对加速度信号进行处理之后我们得到了一组可以积分的加速度信号。
为了获得比较高的积分精度,我们采用了Simpson 公式进积分
在每个小区间 [xk,xk+1]使用Simpson 公式
Simpson 公式中每一个小微段用到三个点积分,所以我们积分时对每三个点进行积分从而得到如下的公式
其中h 是采样周期的二倍,a 为采集到的加速度,n 为信息处理的周期。
4 系统电源
本系统需要供电的主要有三部分,加速度传感器、STM32 和AD7705。
本系统选择了12V 的铅蓄电池以及三个电源模块,见图5 和图6。
加速度传感器和STM32 的工作电压都是2.2 —3.6V,而AD7705 的工作电压是5V,所以我选择了一个12V 的铅蓄电池,然后通过三个电源模块,将12V 的电压分别转换成为所需的电压.。