高等结构动力学2_模态综合法(动态子结构方法)
结构动力学分析中的模态分析技术研究

结构动力学分析中的模态分析技术研究一、引言结构动力学指的是研究建筑物或其他工程结构在外部不规则加载下的运动特性、振动特性、固有频率、振动模式等的学科。
结构动力学的研究对于提高建筑物以及其它工程结构物在地震、风灾以及自然灾害等外部荷载下的抗震、抗风、以及其他抗震能力和稳定性起着非常重要的作用。
而模态分析技术则是结构动力学研究的一个重要的分析方法,在建设工程师的日常工作中通过对结构模态进行分析,可以有效的评估建筑物的稳定性。
二、模态分析技术的基本概念模态分析技术是一种用来计算和观察建筑物振动特征的工具,也被称为振型分析、频率响应分析。
模态分析的目的是为了找到建筑物或结构在某些特定条件下的固有频率和振型,频率与振型是对结构的响应表格进行评价的基础。
通过计算建筑物共振频率,并多角度观察它固有的振型,可以确定任何仍需改进的结构点,为进一步建设工程提供更加精确的数据。
三、模态分析的分类常见的模态分析通过计算建筑物的固有频率和振形偏差来确定任何仍需改进的结构点。
而这种分析方式涉及到不同的分类。
1.线性模态分析线性模态分析的目的是确定建筑物或结构的固有频率、振动模式和动态响应,它可以为未来的建筑物设计和改进提供重要信息和数据。
线性模态分析是一个有效的方法,可以确定建筑物在自然灾害发生时的稳定性。
2.非线性模态分析非线性模态分析是建立在线性分析基础上的,在非线性分析中,建筑物或结构在动荷载作用下会出现非线性振动现象,常见的非线性振动现象包括弹塑性振动和不稳定振动等。
四、模态分析技术的应用模态分析技术在建设工程中有着广泛的应用,下面介绍其中的几个模式。
1.模态分析在风电场中的应用模态分析技术可以用于风电场的安装设计,通过分析风力发电机的固有频率和振型,优化风电场的结构设计,提高风电机的稳定性和抗风能力,改善建筑物的周围环境。
2.模态分析在桥梁工程中的应用模态分析技术可用于评估桥梁的稳定性、预测桥梁的运动模式以及确定桥梁的动态响应。
高等结构振动学-第10章-模态综合方法
(10-23)
{F (t)} [S]T {P(t)}
(10-24)
在模态综合法中,为了描述结构在空间的运动和变形状态,采用两类广义坐
标来描述,分别为“物理(几何)坐标”和“模态坐标”,物理坐标描述结构各
节点的几何坐标位置,而模态坐标则表示物理坐标响应中各个模态成份大小的
量。
对于模态综合法中的“模态”一词,它比“振型”具有更加广义的内涵,它
(1)按结构特点划分子结构 (2)计算并选择分支模态进行第一次模态坐标变换 (3)在全部模态坐标中,选择不独立的广义坐标 (4)由位移对接条件,形成广义坐标的约束方程,得到独立坐标变换阵 [S ] (5)对组集得到的质量矩阵、刚度矩阵进行合同变换,得到独立坐标下的质量
矩阵,刚度矩阵,形成整个系统的振动方程 (6)根据坐标变换关系,再现子结构物理参数
(10-5)
通常,[ ], [ ] 的个数远少于对应子结构的自由度数。
记:
{
p}
p p
[
M
]
[
M 0
]
0 [M ]
[
K
]
[
K 0
]
0 [K ]
(10-6)
[M ] [ ]T [m ][ ] [M ] [ ]T [m ][ ]
[]T [K ][] diag[2]
(10-38)
子结构柔度矩阵为:
[G] [K ]1 [](diag[2 ])1[]T [k ](diag[k2 ])1[k ]T [d ](diag[d2 ])1[d ]T
(10-15)
{
p}
高等结构动力学大作业

高等结构动力学大作业1. 简介高等结构动力学是结构工程学中的一门重要课程,主要研究结构在外力作用下的动力响应。
本次大作业将探讨高等结构动力学的相关内容,包括结构振动、模态分析和地震反应等。
2. 结构振动结构振动是结构动力学的基础知识,是研究结构在外力作用下的运动规律的重要手段。
结构振动可以分为自由振动和受迫振动两种。
2.1 自由振动自由振动是指结构在没有外力作用下的振动。
结构的自由振动可以通过求解结构的固有振型和固有频率来得到。
固有振型是指结构在自由振动时的形态,固有频率是指结构在自由振动时的振动频率。
2.2 受迫振动受迫振动是指结构在外力作用下的振动。
外力可以是周期性的,也可以是非周期性的。
受迫振动可以通过求解结构的响应函数和激励函数来得到。
3. 模态分析模态分析是研究结构振动特性的重要方法,通过模态分析可以得到结构的模态参数,包括模态振型和模态频率。
模态振型是指结构在特定模态下的振动形态,模态频率是指结构在特定模态下的振动频率。
3.1 模态分析的方法常用的模态分析方法包括有限元法、模态超级位置法和模态伸缩法等。
有限元法是一种基于数值计算的方法,通过离散化结构并求解特征值问题来得到结构的模态参数。
模态超级位置法是一种基于振动测量的方法,通过测量结构的振动响应来得到结构的模态参数。
模态伸缩法是一种基于模态参数估计的方法,通过估计结构的模态参数来得到结构的模态参数。
3.2 模态分析的应用模态分析在结构工程中有广泛的应用,包括结构设计、结构优化和结构监测等。
通过模态分析可以评估结构的动力性能,指导结构的设计和优化,以及监测结构的健康状况。
4. 地震反应地震反应是指结构在地震作用下的振动响应。
地震是一种破坏性的外力,对结构的安全性和稳定性具有重要影响。
地震反应分为静力反应和动力反应两种。
4.1 静力反应静力反应是指结构在地震作用下的静态响应。
静力反应可以通过结构的刚度矩阵和地震力谱来计算得到。
静力反应的计算可以采用静力分析和动力分析两种方法。
第1章 结构动力学概述
F (t ) A sin t F (t ) A cos t F (t ) A sin( t )
可以是机器转动引起的不平衡力等。
p (t)
t
建筑 物上 的旋 转机 械
(a) 简 谐 荷 载
2.非随机荷载的类型
高等结构动力学
非简谐周期荷载
定义:荷载随时间作周期性变化,是时间 t 的周期函数,但 不能简单地用简谐函数来表示。 例如:平稳情况下波浪对堤坝的动水压力;轮船螺旋桨产生
动力自由度:
动力分析中为确定体系在振动过程中任一时刻全部质量 的几何位置所需要的独立参数的数目。 独立参数也称为体系的广义坐标,可以是位移、转角或 其它广义量。 在振动的任一时刻,为了表示全部有意义的惯性力的作 用,所必须考虑的独立位移分量的个数,称为体系的动 力自由度
4.
离散化方法 W=2
高等结构动力学
结构动力分析的目的:
确定动力荷载作用下结构的内力和变形; 通过动力分析确定结构的动力特性。
结构力学:
研究结构体系的动力特性及其在动力荷载作用下的动力 反应分析原理和方法的一门理论和技术学科。
该学科的目的在于为改善工程结构体系在动力 环境中的安全性和可靠性提供理论基础。
1.结构动力分析的主要目的
高等结构动力学
W=1
W=2
W=2
记轴变时 W=3 不计轴变时 W=2
W=2
W=3
W=2
4.
离散化方法
高等结构动力学
离散化方法(二)—体系的简化方法 实际结构都是具有无限自由度的
离散化是把无限自由度问题转化为有限自由度的过程 三种常用的离散化方法: 1、集中质量法 2、广义坐标法 3、有限元法
高等结构动力学2_模态综合法(动态子结构方法)
对于一般的动力学分析问题,也可以得到缩聚方程为:
} [C ]*{q } [ K ]*{q} {R}* [ M ]*{q
[C ]* [ S ]T [C ][ S ], {R}* [ S ]T {R}
系统势能: V
1 系统动能: T {q }T [ M ]*{q } 2
[ M ]* [ S ]T [ M ][ S ]
1 {q}T [ K ]*{q} 2
[ K ]* [ S ]T [ K ][ S ]
uJ uI
uI
a b u u a b I I {u } a , {u } b u J u J {u a } [Φ ]a { p a }, {u b } [Φ ]b { p b }
从量级上大幅缩减整体结构自由度而不改变问题的本质模态综合法或动态子结构法hurty和gladwell等人于上世纪60年代初奠定了模态综合技术的理论基础60年代末至70年代间craig和bamptonrubinhouhintz等人先后从各个不同侧面对古典的模态综合技术进行了改进和总结我国学者王文亮王永岩张汝清等人也做了大量研究工作使模态综合方法得到了进一步发展上世纪60年代初人们为了解决大型复杂结构系统整体动力分析困难问题而提出了模态综合技术模态综合法主要分为固定界面模态综合法和自由界面模态综合法模态综合法的发展按照工程的观点或结构的几何轮廓遵循某些原则要求把完整的大型复杂结构人为地抽象成若干个子结构
1 }T [ M ]{ p } T {p 2 [ M ]a [M ] [ 0]
(n1+n2)个
1 V { p}T [ K ]{ p} 2 [ 0] [ M ]b
高等结构动力学讲义

52
第 4 章 结构特征问题求解 4-4 矩阵变换法
53
第 4 章 结构特征问题求解 4-5 矢量正迭代法
54
第 4 章 结构特征问题求解 4-6 矢量逆迭代法
55
第 4 章 结构特征问题求解 4-6 矢量逆迭代法
56
第 4 章 结构特征问题求解 4-6 矢量逆迭代法
57
第 4 章 结构特征问题求解 4-6 矢量逆迭代法
20
第 2 章 离散体动力方程 2-1 动力分析中离散方法
直接法
21
第 2 章 离散体动力方程 2-1 动力分析中离散方法
差分法
22
第 2 章 离散体动力方程 2-1 动力分析中离散方法
加权残值法
23
第 2 章 离散体动力方程 2-1 动力分析中离散方法
24
第 2 章 离散体动力方程 2-1 动力分析中离散方法
41
第 3 章 有限元法 3-10 平面刚架振动
42
第 3 章 有限元法 3-10 平面刚架振动
43
第 3 章 有限元法 3-10 船舶板架振动
44
第 3 章 有限元法 3-10 船舶板架振动
45
第 3 章 有限元法 3-11 船体总振动
船体总振动
一维模型 二维模型 三维模型
46
34
第 3 章 有限元法 3-8 杆纵向振动
35
第 3 章 有限元法 3-8 杆纵向振动
36
第 3 章 有限元法 3-9 杆横向振动
37
第 3 章 有限元法 3-9 杆横向振动
38
第 3 章 有限元法 3-9 杆横向振动
39
第 3 章 有限元法 3-9 杆横向振动
结构动力学2PPT课件
Ii mi Ai 2 (i 1,2,n)
3.动内力幅值计算
位移、惯性力、动荷载频率相同,对于无阻尼体系三者同时达到幅值。故,可 将荷载幅值和惯性力幅值加在结构上,按静力学方法体系的最大动内力和最大 动位移。
例1 试求图示体系质量的最大动位移,并绘制结构的最大动力弯矩图。已知=
3
EI 。 m l3
A m1 m
l2
EI
q sin t
B
C m2 2m EI
l2
l2
2021/5/25
第10页/共32页
10
解 本例静定结构,选择柔度法求解。
1 A m1 m
l2
EI
q sin t
B
C m2 2m EI
l/2
l2
l2
M1图
M图21源自l/4M图
P
q
ql2/8
用图乘法求得,11
l3 8E
小到大排列,称为频率谱。
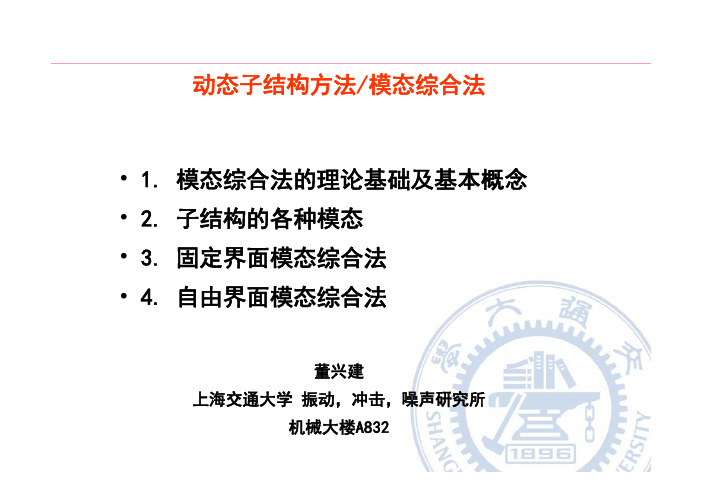
➢将求得的 1 2 回代入(2),由于系数行列式等于零,n个方程是相关的,只
能由其中的n-1个方程解得各自由度动位移之间的比值。可见,体系按某一频
率振动的形状是不变的,称之为振型。
✓ 振型向量 Ai A1i A2i
Ani T
✓ 振型向量常用表述方法一:令某自由度位移为1,例 Ai 1 2i
k 是对称矩阵,k k T
M 也是对称矩阵,同理,有 A jT M Ai AiT M A j
(3)-(4),有
i2
2 j
AiT M A j 0
因为 i j ,所以 AiT M A j 0 i j
振型第一正交性:多自由度体系任意两个不同振型关于质量矩阵正交。
高等结构动力学目录
《高等结构动力学》李东旭,科学出版社,2010.9第1章绪论1.1 结构动力学研究的基础内容1.2 结构动力学研究的基本方法思考题与习题第2章单自由度系统的动力学特性2.1 概述2.2 无阻尼系统的自由振动2.3 有阻尼系统的自由振动2.4 周期载荷作用下的强迫振动2.5 任意载荷作用下的强迫振动思考题与习题第3章多自由度系统的动力学特性3.1 概述3.2 无阻尼系统的自由振动3.3 固有频率与固有模态的特性3.4 有阻尼系统的自由振动3.5 确定基频的近似方法思考题与习题第4章多自由度系统的动力学模型4.1 概述4.2 拉格朗日方程4.3 拉格朗日方程在振动系统中的应用4.4 约束坐标与拉格朗日乘子4.5 受约束结构的振动思考题与习题第5章求解特征问题的数值方法5.1 概述5.2 分解法5.3 迭代法5.4 变换法5.5 三对角矩阵的特征值与特征向量思考题与习题第6章模态参数辨识的基本原理6.1 概述6.2 黏性阻尼系统6.3 结构阻尼系统6.4 单自由度系统频响函数分析(曲线分析) 6.5 多自由度系统频响函数分析6.6 模态参数辨识的基本方法思考题与习题第7章部件模态综合法7.1 概述7.2 基本概念7.3 无阻尼自由振动系统的综合7.4 自由部件模态7.5 残余柔度及残余部件模态思考题与习题第8章结构动力学系统固有特性理论8.1 概述8.2 特征值的变分式8.3 强迫振动8.4 Collatz包含定理8.5 改进的Collatz定理及包含定理之间的关系8.6 实对称矩阵的非正特征值数8.7 基于动刚度的特征值计数法8.8 基于凝聚动刚度的特征值计数法8.9 约束定理证明思考题与习题第9章多自由度系统的强迫振动9.1 概述9.2 求解强迫振动的直接积分法9.3 方程的解耦与模态响应思考题与习题第10章模态叠加法10.1 概述10.2 模态位移法10.3 模态加速度法10.4 含有刚体模态的模态叠加法思考题与习题第11章一维连续系统的动力学建模与分析11.1 概述11.2 弦的振动11.3 杆的纵向振动11.4 杆的扭转振动11.5 轴系的扭转振动11.6 梁横向振动的一般情况11.7 梁横向振动的特殊情况11.8 圆环的振动思考题与习题第12章二维连续系统的动力学建模与分析12.1 概述12.2 薄膜的振动12.3 板的横向振动12.4 壳的振动思考题与习题第13章固液耦合系统的动力学建模与分析13.1 概述13.2 液体储箱壳体的固有特性13.3 盛液储箱固液耦合下的纵向振动13.4 考虑固液耦合时箭体的纵向振动13.5 箭体的横向振动与液体晃动问题思考题与习题第14章航天器空间桁架结构动力学建模与分析14.1 概述14.2 简化模型14.3 直梁式架设桁架动力学分析14.4 直梁式可展桁架动力学仿真14.5 结构桁架的模态分析14.6 结构桁架的谐激励响应14.7 结构桁架的瞬态响应14.8 小结思考题与习题第15章航天器太阳能电池翼结构动力学建模与分析15.1 概述15.2 太阳能电池翼基板连接刚度的参数识别15.3 刚性组合基板的动力学建模与分析15.4 柔性组合基板的动力学建模与分析15.5 一类卫星太阳能电池翼的结构动力学特性分析思考题与习题附录A 课程设计题目附录B 部分习题答案主要参考文献《高等结构动力学》唐友刚,天津大学出版社,2002第1章绪论1.1 结构动力学发展简介1.2 结构动力问题的特点1.3 结构动力问题的分类1.4 结构系统的动力自由度及其离散1.5 振动能量耗散与阻尼力1.6 建立运动方程的方法综述第一篇线性振动第2章单自由度系统振动2.1 运动方程的建立2.2 无阻尼系统自由振动分析2.3 有阻尼系统自由振动分析2.4 简谐荷载作用下的动力响应2.5 周期荷载作用下的动力响应2.6 冲周荷载和任意动荷载作用下的动力响应第3章多自由度系统振动3.1 运动方程的建立3.2 系统无阻尼自由振动3.3 多自由度系统阻尼的处理3.4 无阻尼强迫振动响应计算3.5 有阻尼强迫振动响应计算3.6 主、从系统的减振设计第4章分布参数系统的振动4.1 直梁弯曲振动的微分方程4.2 直梁弯曲振动的固有特性4.3 固有振形的正交性4.4 用振形叠加法计算强迫振动响应4.5 直杆的轴向振动、扭转振动和剪切振动4.6 链状结构的传递矩阵法第5章大型结构系统的振动分析方法5.1 动力问题的有限单元法5.2 无约束结构系统分析5.3 里次法及子空间迭代法5.4 动态子结构的模态综合法第二篇非线性振动第6章非线性系统的解析方法……第7章多自由度系统与参数振动第8章动力响应计算的数值方法第三篇工程中的若干振动问题第9章大开口船弯扭耦合振动分析第10章大型储液器液固耦合振动分析第11章海洋平台张力腿波、流联合作用的动力响应参考文献。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Φ
a p b Φ J b {0} p
[C ]{ p} {0}
d行
(n1+n2)个 p a
所以,有:
[C dd ]1[C dI ] { p} { p I } [ S ]{q} [I ]
独立的模态坐标
(n1+n2-d)个
[ M ]* [ S ]T [ M ][ S ], [ K ]* [ S ]T [ K ][ S ]
对于一般的动力学分析问题,也可以得到缩聚方程为:
} [C ]*{q } [ K ]*{q} {R}* [ M ]*{q
[C ]* [ S ]T [C ][ S ], {R}* [ S ]T {R}
动态子结构方法的基本思想:
按照工程的观点或结构的几何轮廓,遵循某些原则要求,把完整的大型复 杂结构人为地抽象成若干个子结构。首先对自由度少得多的各个子结构进 行动态分析,然后经由各种方案,把它们的主要模态信息予以保留,以综 合总体结构的动态特性 总系统(n个自由度) 子结构1 dd ]1[C dI ] [S ] [ I ]
uJ uI
uI
a b u u a b I I {u } a , {u } b u J u J {u a } [Φ ]a { p a }, {u b } [Φ ]b { p b }
{ p} b p d个 pd 设{p}中独立广义坐标为{pI},非独立广义坐标为{pd}: { p} p I (n1+n2-d)个 pd { pd } [C dd ]1[C dI ]{ p I } 可写为: [C dd ] [C dI ] {0} pI
子结构1 固定 子结构2
自由界面模态综合法:子结构交界面全部为自由
子结构1 自由 子结构2
子结构1 k m k m k m k
子结构2 k m m k
固定界面模态综合法:
子结构1 固定 子结构2
自由界面模态综合法:
子结构1 m/2 自由 m/2 子结构2
•模态综合法的基本步骤
以一个例子说明模态综合法的基本步骤
1 V { p}T [ K ]{ p} 2 [ 0] b [M ] [ K ]a [K ] [ 0]
pa { p} b (n1+n2)个 p
[ 0] b [K ]
[M]和[K]实际上是独立处理各子结构后得到的,而每个子结构的界面自由 度{uJa}、{uJb}不是相互独立的,因此坐标{p}中的元素不是相互独立的,不 独立坐标的个数d恒等于界面自由度数,例如上图中d=3 由界面连续性条件: {u J } {u J }
[ 0] b [K ]
uJ uI
uI
a b u u a b I I {u } a , {u } b u J u J {u a } [Φ ]a { p a }, {u b } [Φ ]b { p b }
1 }T [ M ]{ p } T {p 2 [ M ]a [M ] [ 0]
动态子结构方法/模态综合法
• 1. 模态综合法的理论基础及基本概念 • 2. 子结构的各种模态 • 3. 固定界面模态综合法 • 4. 自由界面模态综合法
董兴建 上海交通大学 振动,冲击,噪声研究所 机械大楼A832
• 模态综合法的进一步阐述
有限单元法可成功将一连续系统转化为一个多自由度系统问题
可求得:系统的固有频率,振型(模态),动力响应
1 }T [ M ]{ p } T {p 2 [ M ]a [M ] [ 0]
(n1+n2)个
1 V { p}T [ K ]{ p} 2 [ 0] [ M ]b
pa { p} b p
{ p} [ S ]{q}
(n1+n2-d)个
[ K ]a [0] [K ] b [ 0 ] [ ] K [C dd ]1[C dI ] [S ] [I ]
系统的无阻尼自由振动的运动方程:
} [ K ]*{q} {0} [ M ]*{q
广义特征值问题:
[ K ]*{Φ} [ M ]*{Φ}
(n1+n2-d)
新方程的阶数等于所选取的全部保留模态的总数减去对接自由度数
系统的无阻尼自由振动的运动方程:
} [ K ]*{q} {0} [ M ]*{q
…
子结构n
(2)子结构模态分析
总系统(m个自由度,m<n) 子结构1 子结构2
(3)综合子结构而成 总系统方程并求解 (4)再现子结构
…
子结构n
再现子结构:于整体结构中再现由模态坐标返回到物理坐标后的各 子结构,以得到实际结构的主振型和位移及应力等动态响应
•模态综合法理论基础-Ritz法
取假设模态为若干个独立(线性无关)的假设振型的线性组合
a b
[ K ]a [Φ ]aT [ k a ][Φ ]a , [ K ]b [Φ ]bT [ k b ][Φ ]b
[ M ]a [M ] [ 0] [ 0] b [M ]
(n1+n2)个
pa { p} b p
[ K ]a [K ] [ 0]
1 a T a 1 b T b b a } [ m ]{u } T T T {u } [ m ]{u } {u 2 2 1 a T a 1 b T b b a b a V V V {u } [ k ]{u } {u } [ k ]{u } 2 2 a b 选择恰当的子结构的保留模态来构成子结构的李兹基: [Φ ] [Φ ]
界面
uJ uI
uI
整体结构
两个子结构a、b
每个子结构的自由度分为内部自由度{uI}和界面自由度{uJ}:
a u a I {u } a , u J b u b I {u } b u J
a b 根据界面连续性条件,有: {u J } {u J }
由力的对接条件,有:
X = a1f1 + a2f2 + + as fs s <n = Da T é ù a = ê a1 a2 as ú D = éê f1 f2 fs ùú ë û ë û
带入瑞利商
X TKX R(X ) = T X MX
原 n 特征值问题转化为近似的 s 阶特征值问题
现代工程结构特征:庞大,复杂
飞机,大型轮船,高层建筑,大型机械,航天器 系统自由度成千上万阶,甚至几十万阶 传统的动力特性和动力响应分析往往十分困难
对策:从量级上大幅缩减整体结构自由度而不改变问题的本质 模态综合法或动态子结构法
模态综合法的发展 -上世纪 60年代初,人们为了解决大型复杂结构系统整体动力 分析困难问题而提出了模态综合技术 -Hurty和 Glad Well等人于上世纪 60年代初奠定了模态综合技 术的理论基础 - 60 年 代 末 至 70 年 代 间 , Craig 和 Bampton 、 Rubin 、 Hou 、 Hintz等人先后从各个不同侧面对古典的模态综合技术进行了 改进和总结 -我国学者王文亮、王永岩、张汝清等人也做了大量研究工作 ,使模态综合方法得到了进一步发展 -模态综合法主要分为固定界面模态综合法和自由界面模态综 合法
系统势能: V
1 系统动能: T {q }T [ M ]*{q } 2
[ M ]* [ S ]T [ M ][ S ]
1 {q}T [ K ]*{q} 2
[ K ]* [ S ]T [ K ][ S ]
uJ uI
uI
a b u u a b I I {u } a , {u } b u J u J {u a } [Φ ]a { p a }, {u b } [Φ ]b { p b }
uJ uI
uI
a b u u a b I I {u } a , {u } b u J u J {u a } [Φ ]a { p a }, {u b } [Φ ]b { p b }
1 a T a 1 b T b b a } [ m ]{u } T T T {u } [ m ]{u } {u 2 2 1 1 V V a V b {u a }T [ k a ]{u a } {u b }T [ k b ]{u b } 2 2 1 1 a T 1 b T a a b b } [M ] { p } {p } [M ] { p } {p }T [ M ]{ p } T {p 2 2 2 1 1 1 V { p a }T [ K ]a { p a } { p b }T [ K ]b { p b } { p}T [ K ]{ p} 2 2 2 其中: [ M ]a [Φ ]aT [ m a ][Φ ]a , [ M ]b [Φ ]bT [ m b ][Φ ]b
{ f Ja } { f Jb } {0}
界面内力合力为零
界面
uJ uI
uI
整体结构
a u a I {u } a , u J b u b I {u } b u J
子结构a、b
系统动能: T T a T b
1 a T a 1 b T b b a } [ m ]{u } {u } [ m ]{u } {u 2 2
( K - w2M )a = 0
有如下结论
K = DTKD wi2 = wi2 Xi = Dai XiTMX j = 0 i = 1,2,s
M = DTMD
i = 1,2,s XiTKX j = 0 i¹j