workbench子弹动力学分析
workbench动力学概论
DYNAMICS 11.0
How to Approximate Rayleigh Damping Constants
Rayleigh Equation: the sum of
the and terms is nearly constant over the range of frequencies
DYNAMICS 11.0
模态叠加法
• 按自然频率和模态将完 全耦合的通用运动方程 转化为一组独立的非耦 合方程 • 可以用来处理瞬态动力 学分析和谐响应分析 • 详见《模态叠加法》
动力学控制方程方法求解方法
显式求解法
Training Manual
– ANSYS-LS/DYNA方法,也称为闭式求解法或预测求解 法; – 积分时间步 Dt必须很小,但求解速度很快(没有收敛问 题); – 可用于波的传播,冲击载荷和高度非线性问题; – 当前时间点的位移 {u}t 由包含时间点 t 的方程推导出来 – 无条件稳定: Dt的大小仅仅受精度条件控制, 无稳定性。
DYNAMICS 11.0
阻尼定义与分类
Training Manual
阻尼是一种能量耗散机制,它使振动随时间减 弱并最终停止。 阻尼的数值主要取决于材料、运动速度和振动 频率。 阻尼可分类如下:
– 粘性阻尼
– 滞后或固体材料阻尼 – 库仑或干摩擦阻尼
DYNAMICS 11.0
粘性阻尼
Training Manual
• 比例常数 m 就是摩擦系数;
Training Manual
DYNAMICS 11.0
– 动力学分析中一般不予考虑。
阻尼矩阵
在ANSYS中,阻尼是各种指定阻尼的和
[C ] [ M ] ( c )[ K ]
如何简单的区分ANSYS Workbench有限元分析中的静力学与动力学问题
如何简单的区分ANSYS Workbench 有限元分析中的静力学与动力学问题四川 曹文强“力”是一个很神秘的字,是个象形字,形体极像古代的犁形,上部为犁把,下部为耕地的犁头,也形象的解释“力”含义 ,将无形不可见,不可描述的现象充分的表达了出来。
从初中物理我们就学习过,力是物体之间的相互作用,是使物体获得加速度和发生形变的外因,单独就力而言,有三个要素力的大小、方向和作用点。
力学是研究物体的机械运动和平衡规律及其应用的,力学可分为静力学、运动学和动力学三部分。
而今天主要是简单介绍一个静力学与动力学。
首先,静力学与动力学区别是什么?答案很简单,一个是“静”,一个是“动”,动静的含义就是时间的问题。
故,静力学实际是在研究工程结构在静载荷作用下的弹塑性变形和应力状态,以及结构优化问题,其中的静载荷是指不随时间变化的外加载荷,变化较慢的载荷,也可近似地看作静载荷。
当然“静”动力学静力学实际上只是相对而言,严格地说,物体相对于惯性参照系处于静止或作匀速直线运动的状态,即加速度为零的状态,也就是平衡的状态。
对于平衡的状态阐述,牛顿第一运动定律(牛顿第一定律,又称惯性定律、惰性定律)就有一个完整表述:任何物体都要保持匀速直线运动或静止状态,直到外力迫使它改变运动状态为止。
此外,静力学的有五大公理公理一力的平行四边形法则:作用在物体上同一点的两个力,可合成一个合力,合力的作用点仍在该点,其大小和方向由以此两力为边构成的平行四边形的对角线确定,即合力等于分力的矢量和。
公理二二力平衡公理:作用在物体上的两个力,使物体平衡的必要和充分条件是:两个力的大小相等,方向相反,作用线沿同一直线。
公理三加减平衡力系公理:在已知力系上加或减去任意平衡力系,并不改变原力系对刚体的作用。
公理四牛顿第三定律:两物体间的相互作用力,大小相等,方向相反,作用线沿同一直线。
此公理概括了物体间相互作用的关系,表明作用力与反作用力成对出现,并分别作用在不同的物体上。
workbench瞬态动力分析

积分时间步长
• AUTOTS对于全瞬态分析缺省是打开的. 对于缩 减法和模态叠加法,是不可用的. • AUTOTS 会减小ITS (直到 Dtmin) 在下列情况:
– – – – – – 在响应频率处,小于20个点 求解发散 求解需要大量的平衡迭代(收敛很慢) 塑性应变在一个时间步内累积超过15% 蠕变率超过0.1 如果接触状态要发生变化 ( 决大多数接触单元可由 KEYOPT(7) 控制)
分析选项
• 求解器选择
– 缺省ANSYS选择稀疏求解器 – 对于大自由度问题 (>100000 dofs) 使用PCG法
初始条件
• 初始条件
– 时间t = 0时的条件:u0 ,v0,a0 – 它们的缺省值为, u0 = v0 = a0 = 0 – 可能要求非零初始条件的实例:
• 飞机着陆 (v00) • 高尔夫球棒击球 (v00) • 物体跌落试验 (a00)
分析选项
• 输出控制
–用来控制写到结果文件的内容. –使用命令 OUTRES 或选择 Solution > Sol’n Control.. > Basic –通常的选项用来将每个子步的结果写到结果文件中去.
• 可光滑绘制结果与时间的关系曲线. • 可能造成结果文件庞大.
分析选项
• 瞬态效应 on/off
分析过程
• 讨论完全法瞬态分析过程. • 五个主要步骤:
– – – – – 建立模型 选择分析类型和选项 指定边界条件和初始条件 施加载荷历程并求解 查看结果
模型: 所有的非线性因素可允许注意要求密度!
分析选项
– – – – 进入求解阶段,并选择瞬态分析. 选择完全法 求解选项 阻尼
• 求解方法
– 完整矩阵方法为缺省方法。允许下列非 线性选项:
ANSYS Workbench 17·0有限元分析:第11章-显式动力学分析
第11章 显式动力学分析自带有学的分析方法。
★ 了解显式动力学分析。
11.1 显式动力学分析概述显式算法主要用于高速碰撞及冲压成型过程的仿真,其在这方面的应用效果已超过隐式算法。
11.1.1 显式算法与隐式算法的区别1.显式算法动态显式算法是采用动力学方程的一些差分格式(如中心差分法、线性加速度法、Newmark 法和Wilson法等),该算法不用直接求解切线刚度,也不需要进行平衡迭代,计算速度较快,当时间步长足够小时,一般不存在收敛性问题。
动态显式算法需要的内存也比隐式算法要少,同时数值计算过程可以很容易地进行并行计算,程序编制也相对简单。
显式算法要求质量矩阵为对角矩阵,而且只有在单元级计算尽可能少时,速度优势才能发挥,因而往往采用减缩积分方法,但容易激发沙漏模式,影响应力和应变的计算精度。
2.隐式算法在隐式算法中,每一增量步内都需要对静态平衡方程进行迭代求解,并且每次迭代都需要求解大型的线性方程组,这一过程需要占用相当数量的计算资源、磁盘空间和内存。
该算法中的增量步可以比较大,至少可以比显式算法大得多,但是实际运算中还要受到迭代次数及非线性程度的限制,所以需要取一个合理值。
第11章显式动力学分析在ANSYS中,显式动力学包括ANSYS Explicit STR、ANSYS AUTODYN 及ANSYSLS-DYNA 3个模块。
1.ANSYS Explicit STRANSYS Explicit STR是基于ANSYS Workbench仿真平台环境的结构高度非线性显式动力学分析软件,可以求解二维、三维结构的跌落、碰撞、材料成型等非线性动力学问题,该软件功能成熟、齐全,可用于求解涉及材料非线性、几何非线性、接触非线性的各类动力学问题。
2.ANSYS AUTODYNAUTODYN用来解决固体、流体、气体及其相互作用的高度非线性动力学问题。
AUTODYN 已完全集成在ANSYS Workbench中,可充分利用ANSYS Workbench的双向CAD接口、参数化建模以及方便实用的网格划分技术,还具有自身独特的前、后处理和分析模块。
workbench 谐响应 扫频 转子动力学

workbench 谐响应扫频转子动力学
我猜你想了解的是 Workbench 进行谐响应扫频和转子动力学分析的相关内容。
Workbench 是 ANSYS 公司推出的一款协同仿真环境,广泛应用于结构、流体、电磁等领域的仿真分析。
在 Workbench 中进行谐响应扫频和转子动力学分析的基本流程如下:
1. 建立模型:首先需要建立分析模型,包括几何模型和网格划分等。
可以使用Workbench 中的 DesignModeler 或 SpaceClaim 等工具进行建模和网格划分。
2. 施加激励:在模型上施加激励,例如力、压力、位移等。
可以使用 Workbench 中的Static Structural 或 Modal 等模块进行激励的施加。
3. 设置分析选项:设置谐响应分析的选项,例如频率范围、求解器等。
可以使用Workbench 中的 Harmonic Response 模块进行设置。
4. 进行分析:运行谐响应分析,得到模型的频率响应曲线。
可以使用 Workbench 中的Results 模块查看分析结果。
5. 进行转子动力学分析:如果需要进行转子动力学分析,可以在模型上添加轴承、轴等组件,并设置相应的边界条件和激励。
可以使用 Workbench 中的 Rotordynamics 模块进行分析。
需要注意的是,具体的分析流程和方法可能会因模型的不同而有所差异,建议你根据实际情况进行调整。
workbench瞬态动力学实例
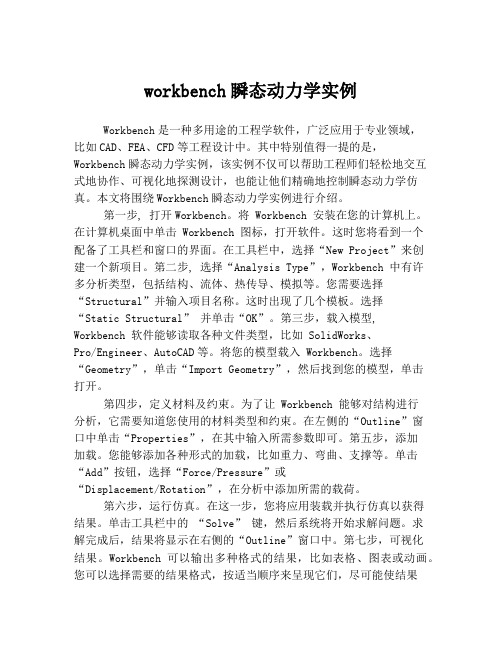
workbench瞬态动力学实例Workbench是一种多用途的工程学软件,广泛应用于专业领域,比如CAD、FEA、CFD等工程设计中。
其中特别值得一提的是,Workbench瞬态动力学实例,该实例不仅可以帮助工程师们轻松地交互式地协作、可视化地探测设计,也能让他们精确地控制瞬态动力学仿真。
本文将围绕Workbench瞬态动力学实例进行介绍。
第一步, 打开Workbench。
将 Workbench 安装在您的计算机上。
在计算机桌面中单击 Workbench 图标,打开软件。
这时您将看到一个配备了工具栏和窗口的界面。
在工具栏中,选择“New Project”来创建一个新项目。
第二步, 选择“Analysis Type”,Workbench 中有许多分析类型,包括结构、流体、热传导、模拟等。
您需要选择“Structural”并输入项目名称。
这时出现了几个模板。
选择“Static Structural” 并单击“OK”。
第三步,载入模型, Workbench 软件能够读取各种文件类型,比如 SolidWorks、Pro/Engineer、AutoCAD等。
将您的模型载入 Workbench。
选择“Geometry”,单击“Import Geometry”,然后找到您的模型,单击打开。
第四步,定义材料及约束。
为了让 Workbench 能够对结构进行分析,它需要知道您使用的材料类型和约束。
在左侧的“Outline”窗口中单击“Properties”,在其中输入所需参数即可。
第五步,添加加载。
您能够添加各种形式的加载,比如重力、弯曲、支撑等。
单击“Add”按钮,选择“Force/Pressure”或“Displacement/Rotation”,在分析中添加所需的载荷。
第六步,运行仿真。
在这一步,您将应用装载并执行仿真以获得结果。
单击工具栏中的“Solve” 键,然后系统将开始求解问题。
求解完成后,结果将显示在右侧的“Outline”窗口中。
ansysworkbench瞬态动力学实例
在本文中,我将为您撰写一篇关于ANSYS Workbench瞬态动力学实例的文章。
我们将深入探讨ANSYS Workbench在瞬态动力学仿真方面的应用,从简单到复杂、由浅入深地讨论其原理和实践操作,并共享个人观点和理解。
第一部分:介绍ANSYS Workbench瞬态动力学仿真ANSYS Workbench是一种用于工程仿真的全面评台,包含了结构、流体、热传递、多物理场等多种仿真工具。
瞬态动力学仿真是ANSYS Workbench的重要应用之一,它能够模拟在时间和空间上随机变化的动力学过程,并对结构在外部力作用下的动力响应进行分析。
在瞬态动力学仿真中,ANSYS Workbench可以模拟诸如碰撞、冲击、振动等动态载荷下的结构响应,用于评估零部件的耐久性、振动特性、动态稳定性等重要工程问题。
通过对这些现象的模拟和分析,工程师可以更好地了解结构在实际工况下的性能,进而进行有效的设计优化和改进。
第二部分:实例分析为了更直观地展示ANSYS Workbench瞬态动力学仿真的应用,我们以汽车碰撞仿真为例进行分析。
假设我们需要评估汽车前部结构在碰撞事故中的动态响应,我们可以通过ANSYS Workbench建立汽车前部结构的有限元模型,并对其进行碰撞载荷下的瞬态动力学仿真。
我们需要构建汽车前部结构的有限元模型,包括车身、前保险杠、引擎盖等部件,并设定材料属性、连接方式等。
接下来,我们可以在仿真中引入具体的碰撞载荷,如40km/h车速下的正面碰撞载荷,并进行瞬态动力学仿真分析。
通过仿真结果,我们可以获取汽车前部结构在碰撞中的应力、应变分布,以及变形情况,从而评估其在碰撞事故中的性能表现。
第三部分:个人观点与总结通过以上实例分析,我们可以看到ANSYS Workbench瞬态动力学仿真在工程实践中的重要应用价值。
瞬态动力学仿真不仅能够帮助工程师分析结构在动态载荷下的响应,还可以为设计优化、安全评估等工程问题提供重要参考。
workbench动力学失稳算例
workbench动力学失稳算例 1. 引言 动力学失稳是指系统在运行过程中出现不稳定的行为,通常是由于外部扰动、内部参数变化或者系统本身的非线性特性导致的。在工程领域中,动力学失稳可能会导致设备故障、事故发生甚至生命安全的威胁。因此,对动力学失稳进行深入研究和分析具有重要意义。
本文将通过使用workbench软件进行动力学失稳算例分析,深入探讨动力学失稳的机理、影响因素以及预防措施。
2. 动力学失稳的机理 动力学失稳是由于系统的非线性特性导致的,当系统受到外部扰动或内部参数变化时,可能会出现不稳定的行为。具体的机理包括以下几个方面:
2.1 超临界分岔 超临界分岔是指系统在参数变化过程中出现的稳定点的数量发生突变的现象。当参数变化到一定程度时,系统的稳定点数量会从一个突然变为两个,这种突变导致了系统的不稳定性。
2.2 震荡现象 震荡现象是指系统在受到外部扰动后出现周期性振荡的行为。这种振荡可能会导致系统的能量耗散和破坏,从而引发动力学失稳。
2.3 混沌现象 混沌现象是指系统在一定条件下出现无规律、无周期性的运动状态。混沌现象的出现使得系统的行为难以预测和控制,从而增加了动力学失稳的风险。
3. 影响动力学失稳的因素 动力学失稳受到多种因素的影响,包括外部环境、系统参数和控制策略等。以下是一些常见的影响因素:
3.1 外部扰动 外部扰动是动力学失稳的主要原因之一。当系统受到外部环境的变化或干扰时,系统可能会出现不稳定的行为。例如,风力对建筑物的影响、地震对桥梁的影响等。 3.2 内部参数变化 内部参数的变化也会导致动力学失稳。例如,系统的质量、刚度、阻尼等参数发生变化时,系统的稳定性可能会发生改变。
3.3 控制策略 控制策略的选择和设计也会对动力学失稳产生影响。不合理的控制策略可能会导致系统的不稳定行为。因此,在设计控制策略时需要考虑系统的动力学特性和稳定性。
3.4 非线性特性 系统的非线性特性是导致动力学失稳的重要原因。非线性特性使得系统的行为变得复杂,可能会出现超临界分岔、震荡、混沌等现象。
基于ANSYS Workbench 的变膛压作用下弹丸发射强度分析
ysis of the launch intensity of the projectile.
Key words: ANSYS Workbench; variable bore pressure; bullet strength; analysis method
弹丸在内弹道发射过程中要承受各种力的作用,
1stOpt、OriginLab 以及 Matlab 软件 [7⁃10] ,本文在进行膛
压的 P( t) 函数拟合时选用了 Matlab 软件。 拟合时首
先将离散数据作为向量输入 Matlab 当中,输入时将 x
138
崔 瀚,等:基于 ANSYS Workbench 的变膛压作用下弹丸发射强度分析
度仿真。 通过提取仿真结果发现,在变膛压作用下,弹丸最大等效应力和等效弹性应变与膛压变化并不成正比,二
者在发射过程中存在一定的波动;本文所提出的方法可为弹丸的发射强度分析提供新的途径。
关键词:ANSYS Workbench; 变膛压; 弹丸强度; 分析方法
中图分类号:TJ410 文献标志码:A DOI:10.3969 / j.issn.1673⁃3819.2021.01.024
中必须严格校核弹丸的发射强度。
为例分析该方法的应用。
由于弹丸结构不规则且受力复杂,采用解析法很
难精确计算出发射强度,一般都要使用简化假设才能
做应力应变计算 [1] ,由于简化后的模型计算精度有限,
1 膛压 P( t) 曲线的函数拟合估计
[6]
ANSYS Workbench 瞬 态 动 力 学 分 析 是 时 域 分
quivalent stress and equivalent elastic strain of the projectile are not directly proportional to the change of chamber pressure,
ANSYS Workbench 17·0有限元分析:第17章-流体动力学分析
第17章 流体动力学分析 计算流体动力学分析(机进行数值计算,模拟流体流动时的各种相关物理现象,包括流动、热传导、声场等。
计算流体动力学分析广泛应用于航空航天器设计、★ 掌握流体动力学分析的基础理论。
17.1 流体动力学基础对于所有流动,都需要求解质量和动量守恒方程。
对于包含传热或可压性流动,还需要增加能量守恒方程。
如果是湍流问题,还要选择求解相应的湍流模型。
17.1.1 质量守恒方程适合可压和不可压流动的质量守恒形式为:m i iS u x t =∂∂+∂∂)(ρρ 式中:ρ为密度,t 为时间,i u 为速度张量,i x 为坐标张量。
等式左边第1项是密度变化率,当求解不可压缩流动时该项为零;第2项是质量流密度的散度;右边的源项m S 是稀疏相增加到连续相中的质量,如液体蒸发变成气体或者质量源项,在单相流中,该源项为零。
17.1.2 动量守恒方程在惯性坐标系下,i 方向的动量守恒方程为:第17章 流体动力学分析i i jij i j i j i F g x x p u u x u t ++∂∂+∂∂−=∂∂+∂∂ρτρρ)()( 式中:ρ为密度;t 为时间;i u 、j u 为速度张量;i x 、j x 为坐标张量;i g ρ为重力体积力;p 是静压;i F 是重力体积力和其他体积力(如源于两相之间的作用),i F 还可以包括其他模型源项或者自定义的源项;ij τ是应力张量,定义为:ijl l i j j i ij x u x u x u δμμτ∂∂−⎥⎥⎦⎤⎢⎢⎣⎡⎟⎟⎠⎞⎜⎜⎝⎛∂∂+∂∂=32 式中:μ为流体粘性系数。
通过求解能量方程,可以计算流体和固体区域之间的传热问题。
能量守恒方程形式如下: h eff ij j j j j i eff i i i S u J h x T k x p E u x E t ++−∂∂∂∂=+∂∂+∂∂∑′′′)(())(()(τρρ 式中:T 为温度;k k k t eff +=,为有效导热系数(湍流导热系数根据湍流模型来定义);j J ′是组分j ′的扩散通量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
建立模型
创建显示动力学分析项目并设置单位
选择材料
定义材料
平板为steel 4340 子弹为 cart brass
确定body interactions 参数(具体解释一下)
网格设置并划分
显示单元大小 5mm 影响区的球半径 40mm 单元大小 2mm
划分网格
设置子弹速度
设定终止时间 0.00015秒 插入速度 x y
查看结果