Rotational Moment Analysis and Posture Rectification Strategy of Shield Machine
弹药协调器结构和位置控制动力学分析
摘 要 :提 出 了一种两 自由度 弹 药协调 器 结 构 方案 , 研 究 了其 在 安 装基 础 存在 随机振 动情 况 下 的 受控动 力学行 为 。把安装 基础 的振 动处理 为 弹 药协调 器 所 受 的不 确定 性 外部 扰 动 力 , 并 忽略 弹 药 协调器 对安装 基 础 的作 用 , 同 时假 设 外部 扰 动 力和 控 制 力 大 小 有 界 ; 根据协调器的第二类 L a - g r a n g e方程 以及 一种特 殊给定 的隐式 L y a p u n o v函数 , 建 立 了协调 器 的 非线 性控 制 算 法 以及 结构 与 控 制 的耦 合 动力 学方程 ; 利用 牛顿迭 代 法与龙 格库塔 法 , 求解 了上述 受控 系统 动力 学方程 。计 算结 果表 明, 所 提 出的两 自由度 弹 药协调 器可 以实 现弹 药在存 在 随机 基 础振 动情况 下 的准确 协调定 位。 关键 词 :兵器 科 学技术 ;弹药协调 器 ;动力 学 ;隐式 L y a p u n o v函数 ; 控制
g r a n g e e q u a t i o n s a n d a s pe c i a l i mpl i c i t l y g i v e n Ly a p u n o v f u n c t i o n.Th e d y n a mi c s e q ua t i o n s a r e s o l v e d b y a n u me r i c a l a l g o r i t h m ba s e d o n Ne wt o n, s me t ho d a n d t h e Ru n g e — Ku t t a me t h o d . Th e s i mu l a t i o n r e s u l t s h o ws t h a t t h e p r o p o s e d 2- DOF a m mu n i t i o n c o o r di n a t o r c a n be us e d t o r e a l i z e t h e a c c u r a t e c o o r d i n a t i o n a n d p o s i t i o n i n g c o n t r o l o f t h e a mmun i t i o n s .
焊接温度场和应力场的数值模拟
本文由老高咯贡献pdf文档可能在WAP端浏览体验不佳。
建议您优先选择TXT,或下载源文件到本机查看。
沈阳工业大学硕士学位论文焊接温度场和应力场的数值模拟姓名:王长利申请学位级别:硕士专业:材料加工工程指导教师:董晓强 20050310沈阳工业大学硕士学位论文摘要焊接是一个涉及电弧物理、传热、冶金和力学的复杂过程。
焊接现象包括焊接时的电磁、传热过程、金属的熔化和凝固、冷却时的相变、焊接应力和变形等。
一旦能够实现对各种焊接现象的计算机模拟,我们就可以通过计算机系统来确定焊接各种结构和材料的最佳设计、最佳工艺方法和焊接参数。
本文在总结前人的工作基础上系统地论述了焊接过程的有限元分析理论,并结合数值计算的方法,对焊接过程产生的温度场、应力场进行了实时动态模拟研究,提出了基于ANSYS软件为平台的焊接温度场和应力场的模拟分析方法,并针对平板堆焊问题进行了实例计算,而且计算结果与传统结果和理论值相吻合。
本文研究的主要内容包括:在计算过程中材料性能随温度变化而变化,属于材料非线性问题;选用高斯函数分布的热源模型,利用函数功能实现热源的移动。
建立了焊接瞬态温度分布数学模型,解决了焊接热源移动的数学模拟问题;通过改变单元属性的方法,解决材料的熔化、凝固问题;对焊缝金属的熔化和凝固进行了有效模拟,解决了进行热应力计算收敛困难或不收敛的问题;对焊接过程产生的应力进行了实时动态模拟,利用本文模拟分析方法,可以对焊接过程的热应力及残余应力进行预测。
本文建立了可行的三维焊接温度场、应力场的动态模拟分析方法,为优化焊接结构工艺和焊接规范参数,提供了理论依据和指导。
关键词:焊接,数值模拟,有限元,温度场,应力场沈阳工业大学硕士学位论文SimulationofweldingtemperaturefieldandstressfieldAbstractWeldingisacomplicatedphysicochemica/processwlfiehinvolvesinelectromagnetism,Mattransferring,metalmeltingandfreezing,phase?changeweldingSOstressanddeformationandon,Inordertogethighquafityweldingstmcttlre,thesefactorshavetobecontrolled.Ifcanweldingprocessbesimulatedwithcomputer,thebestdesign,pmceduremethodandoptimumweldingparametercanbeobtained.BasedOilsummingupother’Sexperience,employingnumericalcalculationmethod,thispaperresearchersystemicallydiscussesthefiniteelementanal删systemoftheweldingprocessbyrealizingthe3Ddynamicsimulationofweldingtemperaturefieldandstressfield,thenusestheresearchresulttosimulatetheweldingprocessofboardsurfacingbyFEMsoftANSYS.Atthetheoryresult.sametime.thecalculationresultaccordswithtraditionalanalysisresultandThemaincontentsofthepaperareasfollowing:thecalculationinweldingprocessisamaterialnonlinearprocedurethatthematerialpropertieschangethefunctionofGaussaswiththetemperature;chooseheatsourcemodel.usethefunctioncommandtoapplyloadofmovingheatS012Ie-2.AmathematicmodeloftransientthermalprocessinweldingisestablishedtosimulatethemovingoftheheatsoBrce.Theeffectsofmeshsize,weldingspeed,weldingcurrentandeffectiveradiuselectricarcontemperaturefielda比discussed.Theproblemofthefusionandsolidificationofmaterialhasbeensolvedbythemethodofchangingtheelementmaterial.Theproblemoftheconvergencedifficultyortheun—convergenceduringthecalculatingofthethermalslTessissolved;throughreal-timedynamicsimulationofthestressproducedinweldingprocess,thethermalstressandresidualSll℃SSinweldingcanbepredictedbyusingthesimulativeanalysismethodinthispaper.Inthispaper,afeasibleslIessdyn黜fiesimulationmethodon3Dweldingtemperaturefield,onfieldhadbeenestablished,whichprovidestheoryfoundationandinstructionoptimizingtheweldingtechnologyandparameters.KEYWORD:Welding,NumericalSimulation,Finiteelement,Temperaturefield,Stressfield.2.独创性说明本人郑重声明:所呈交的论文是我个人在导师指导下进行的研究工作及取得的研究成果。
基于镜像对称补偿技术的脱皮机转子结构优化研究

第38卷第6期2021年6月机电工程Vol.38No.6 Journal of Mechanical&Electrical Engineering Jun.2021DOI:10.3969/j.issn.1001-4551.2021.06.017基于镜像对称补偿技术的脱皮机转子结构优化研究*赵知辛1,薛旭东1,薛琳婧2,潘晓阳1,黄鸣远1,李托雷1(1.陕西理工大学机械工程学院,陕西汉中723000;2.陕西铁路工程职业技术学院高铁工程学院,陕西渭南714000)摘要:为解决谷物脱皮机转子径向膨胀变形的瓶颈问题,根据转子的实际尺寸,建立了转子的有限元模型,对转子的受载特性进行了研究,并对纵梁的变形分布数据进行了拟合°首先,采用两步式策略优化方法及镜像对称方法对模型进行了结构补偿,对转子所受离心载荷进行了计算,确定了p:的取值范围,同时确定了其安全系数及许用应力范围;其次,确定了纵梁扫掠路径的描述函数,采用灵敏度分析方法对参数进行了筛选,采用中心复合设计方法生成了样本;最终得到了3个候选点,对优化结果进行了分析,结果表明:当p:-1.0990mm,p4-3.3011mm,p5—4.5004mm,p6—3.6038mm,p7-2.7477mm,p8-2.1978mm时,纵梁平直度最好,安全系数最高;经补偿,脱皮机转子结构的最大应力降低了12.89%;其最大变形量降低了11.31%;&r值下降了64.30%;安全系数提升了14.78%°研究结果表明:采用镜像对称补偿技术解决脱皮机转子的径向膨胀变形的方法是可行的°关键词:脱皮机转子;有限元法;两步式策略;镜像对称方法;中心复合设计中图分类号:TH69汀H122;S226.4文献标识码:A文章编号:1001-4551(2021)06-0774-07Rotor structure optimization of peeling machine based on mirrorsymmetry compensation technologyZHAO Zhi-xin:,XUE Xu-dong:,XUE Lin-jing2,PAN Xiao-yang:,HUANG Ming-yuan:,LI Tuo-lei:(1.Department of Mechanical Engineering,Shaanxi University of Technology,Hanzhong723000,China;2.School of High-Speed Railway Engineering,Shaanxi Railway Institute,Weinan714000,China)Abstract:In order to solve the bottleneck problem of radial expansion deformation of the rotor of grain peeling machine,the finite element model of the rotor was established according to the actual size of the rotor,the load characteristics of the rotor were studied,and the defor^na-tion distribution data of the longitudinal beam were fitted.First,two-step strategy optimization method and mirror symmetry method were used to compensate the structure of the model:the centrifugal load of the rotor was calculated,the range of p;,the safety factor and allowable stress range was determined.Then,the description function of longitudinal beam sweeping path was determine.Finally,the sensitivity analysis method was used to screen the parameters,and the central composite design method(CCD)was used to generate samples.The results shows that when p:-1.0990mm,P4-3.3011mm,p5-4.5004mm,p§-3.6038mm,p7-2.7477mm,p&-2.1978mm,the longitudinal beam has the best flatness and the highest safety factor.After compensation,the maximum stress of the rotor structure is reduced by 12.89%,the maximum deformation is reduced by11.31%,the S£r value has reduced by64.30%,and the safety factor is increased by 14.78%.The mirror symmetry compensation technology is effective and feasible for solving the radial expansion deformation of the rotor of the peeling machine.Key words:rotor of peeling machine;finite element method;two-step strategy;mirror symmetry;central composite design(CCD)收稿日期:2020-:0-:8基金项目:陕西省科技厅重点研发计划项目(20I9GY-068);陕西省教育厅专项科研计划项目(16JK147)作者简介:赵知辛(1973-),男,陕西西安人,博士,讲师,主要从事机械优化设计方面的研究°E-mail:49989803@第6期赵知辛,等:基于镜像对称补偿技术的脱皮机转子结构优化研究•775•0引言以FBPY型脱皮机为基础,某企业进一步研发出了FBGY型双筒式谷物脱皮机。
基于四元数姿态估计的捷联惯导初始对准算法

第34卷第9期传感技术学报Vol.34No.9 2021年9月CHINESE JOURNAL OF SENSORS AND ACTUATORS Sept.2021Initial Alignment Algorithm for SINS Based onQuaternion Attitude EstimationZHOU Xiaoren,ZHAO Heming"(School of Electronic and Information Engineering,Soochow University,Suzhou Jiangsu215006,China)Abstract:The performance of the traditional in-motion OBA coarse alignment algorithm of the strapdown inertial navigation system is degraded by the biases of gyroscopes,especially in low-precision sensors whose accumulated errors reduce the accuracy of the observation vectors.To solve this problem,the quaternion-based Unscented Kalman filter is studied in this paper to estimate the attitude of the carrier.Then the gyroscope biases can be estimated and eliminated effectively in the prediction equation,which suppresses the accumulated errors and improve the convergence precision of the attitude error angle.Finally,the simulation and field tests are carried out to verify the effectiveness of the algorithm studied in this paper.Key words:strapdown inertial navigation system;coarse alignment;attitude estimation;quaternion;unscented Kalman filterEEACC:7230doi:10・3969/j・iss n・1004-1699・2021・09・007基于四元数姿态估计的捷联惯导初始对准算法周晓仁,赵鹤鸣*(苏州大学电子信息学院,江苏苏州215006)摘要:针对传统动基座捷联惯导系统OBA粗对准算法,在低精度传感器中,易受到陀螺零偏的影响,存在累计误差导致观测矢量精度低的缺点,本文研究了基于四元数的无迹卡尔曼滤波来进行载体的姿态估计。
形状记忆合金变刚度软作动器设计

第 43 卷第 6 期2023 年 12 月振动、测试与诊断Vol. 43 No. 6Dec.2023 Journal of Vibration,Measurement & Diagnosis形状记忆合金变刚度软作动器设计∗任旭,杨书吉,文浩,金栋平(南京航空航天大学机械结构力学及控制国家重点实验室南京,210016)摘要软体材料作动器具有良好的目标抓取适应性,为实现软作动器结构的轻量化,保证抓取与承载能力,采用形状记忆合金丝作为驱动元件,设计出一种可变刚度的软作动器。
首先,基于形状记忆合金(shape memory alloy,简称SMA)一维本构关系建立了作动器的弯曲变形力学模型;其次,通过实验对力与变形之间的关系进行了验证,弯曲变形与理论结果一致;最后,通过回弹结构的动力学设计,使得该作动器能够在恢复阶段快速回到初始形态。
实验结果显示,加热用于变刚度的形状记忆合金丝可显著提升作动器的负载能力,从而达到变刚度的效果。
关键词形状记忆合金;可变刚度;本构模型;软体作动器中图分类号TP242;TH11引言机器人通常由刚性部件通过控制系统、驱动机构及关节等来完成各种复杂的动作[1]。
为适应不同的工作环境和特定的任务需求,完全由刚性部件构建的机器人则难以胜任[2]。
受到自然界生物的启发,人们越来越趋于采用具有极低刚度与高适应性的软作动器来代替刚性抓取器,如生物肌肉[3]、章鱼触手和啄木鸟的脖子[4]等。
目前,软作动器有多种驱动形式。
例如,气泵软作动器通过内部气压调节实现变形并维持形状[5];线缆驱动的软作动器是通过电机带动线缆来驱使软作动器变形[6]。
然而,这类作动器需外置动力装置,不够轻便。
基于电活性聚合物的作动器驱动力小、寿命短且响应时间长[7]。
工业上广泛使用的压电材料也可被用于软作动器,但压电材料变形有限,同时驱动电压较高[8]。
此外,形状记忆聚合物(shape memory polymer,简称SMP)因具有变刚度的特性也被用于软作动器中,但SMP自身刚度较低,很难用于抓取大质量物体[9]。
真空波荡器楔口机构结构分析与优化
真 空 波 荡器 楔 口机构 结构 分 析 与优 化
蒋志强 , 杜涵文
( .中 国科 学 院 上 海 应 用 物 理 研 究 所 ,上 海 2 1 0 ; 2 中国 科 学 院 研 究 生 院 ,北 京 1 0 4 ) 1 0 8 0 . 0 0 9
摘
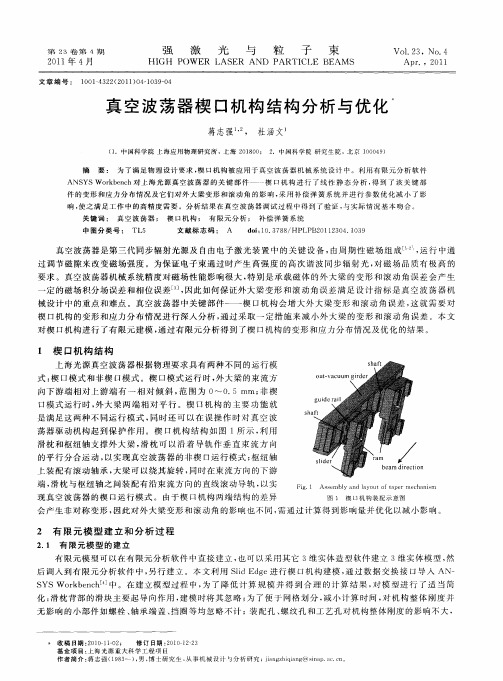
要 : 为 了满 足 物 理 设 计 要 求 , 口 机 构 被 应 用 于 真 空 波 荡 器 机 械 系 统 设 计 中 。 利 用 有 限 兀 分 析 软 件 楔
S ok e c l 中 。在建 立模 型过 程 中 , 了降 低计 算规 模 并 得 到 合 理 的计 算 结 果 , 模 型 进 行 了适 当简 YSW r b n h4 为 对
化: 滑枕 背部 的 滑块 主要起 导 向作 用 , 模 时将其 忽 略 ; 了便 于 网格划 分 , 小计 算 时间 , 机构 整 体 刚度 并 建 为 减 对 无影 响 的小部 件 如螺 栓 、 轴承端 盖 、 圈等 均忽 略不 计 ;装 配孔 、 纹 孔和工 艺 孔对机 构 整体 刚度 的影 响不大 , 挡 螺
关 键 词 : 真 空 波 荡 器 ; 楔 口机 构 ; 有 限 元 分 析 ; 补 偿 弹 簧 系 统 中 图分 类 号 : TL 5 文 献 标 志码 : A d i 1 . 7 8 HP P 2 1 2 0 . 0 9 o:0 3 8 / L B 0 13 4 1 3
真 空波荡 器 是第 三代 同步 辐射 光 源及 自由电子 激光 装 置 中 的关 键 设备 , 由周 期 性磁 场 组 成口 , 行 中通 运 过调 节磁 隙来 改 变磁 场强 度 。为保 证 电子束 通过 时产 生 高强 度 的 高次 谐波 同步 辐射 光 , 磁 场 品质 有极 高 的 对 要 求 。真 空波 荡器 机械 系 统精 度对 磁场性 能 影 响很大 , 别 是承 载 磁体 的外 大梁 的变 形 和 滚 动角 误 差会 产 生 特
旋转式MEMS惯性导航系统的发展及应用
2021年第40卷第6期传感器与微系统(Transducer and Microsystem Technologies)5DOI:10.13873/J.1000-9787(2021)06-0005-03旋转式MEMS惯性导航系统的发展及应用*王思远,罗世彬(中南大学航空航天学院,湖南长沙410086)摘要:旋转调制技术通过将惯性导航系统进行周期性的旋转,可以有效地补偿惯性传感器的常值误差,提高导航精度,因此在近些年得到广泛关注。
对比分析了微机电系统(MEMS)惯性导航系统以及旋转调制技术的国内外发展现状;阐述了MEMS旋转调制方案设计的关键点及发展方向。
关键词:微机电系统惯性导航系统;旋转调制;惯性导航系统;误差补偿中图分类号:TP212;U666.1文献标识码:A 文章编号:1000-9787(2021)06-0005-03Development and application of rotary MEMS inertialnavigation system"WANG Siyuan,LUO Shibin(School of Aeronautics and Astronautics,Central South University,Changsha410086,China)Abstract:Rotation modulation technology can effectively compensate the constant error of the inertial sensor andimprove the navigation precision by periodically rotating the inertial navigation system・Therefore,it has receivedextensive attention in recent years・The domestic and foreign development status of micro-electro・mechanicalsystem(MEMS)inertial navigation system and rotation modulation technology are compared and analyzed.The keypoints and development direction of MEMS rotary modulation scheme design are described.Keywords:micro-electro-mechanical system(MEMS)inertial navigation system;rotational modulation;inertialnavigation system;enor compensation0引言惯性导航技术由于其具有自主性、全天候、抗干扰等特点,而成为众多导航技术中可实现自主导航的一种最重要的技术手段o由于微机电系统(micro-eleclro-mechani-cal system,MEMS)惯性传感器具有成本低,体积重量小,强抗冲击及功耗低等优点,在惯性导航领域中发挥着重要作用。
基于ANSYS的质量质心测量装置定位结构优化设计
机械设备文章编号:1009 6825(2010)21 0343 03基于ANSYS 的质量质心测量装置定位结构优化设计收稿日期:2010 03 15作者简介:李 伟(1978 ),男,中国工程物理研究院总体工程研究所固体力学专业硕士研究生,四川绵阳 621900郝志明(1965 ),男,研究员,中国工程物理研究院总体工程研究所,四川绵阳 621900李 伟 郝志明摘 要:针对某质量质心测量装置的定位结构设计,利用A NSYS 软件的APDL 参数化有限元分析技术,对定位结构进行参数化建模与分析,获得了优化的截面和尺寸,使结构在刚度满足要求的情况下,重量大幅度下降。
关键词:结构优化设计,APDL ,定位结构,有限元分析中图分类号:T U 318文献标识码:A1 概述某质量质心测量装置是产品测试的一种重要设备,其测量精度对产品检测有较大影响,是产品检测过程中较为关键的测试设备之一。
在使用过程中发现该装置的定位结构设计存在刚度不满足使用要求的问题,致使定位结构在测量过程中因受力而产生较大变形,影响测量精度(如图1所示)。
合理优化定位结构的外形,减轻其重量,可有效解决该装置定位结构刚度不足引起的测量精度不高的问题。
本文先采用类比经验和传统材料力学作初步设计,选择矩形为零件的初始截面形状,然后对理论计算难以做到的挠度和应力分布利用A NSYS 软件的A PDL 语言进行参数化有限元分析和结构优化设计,建立结构的参数化有限元模型。
考虑接触非线性因素,创建参数化的分析流程,生成参数化分析宏文件。
应用A N SYS 中的优化分析模块,以结构的截面尺寸作为设计变量,以结构加,当进行后行洞下台阶施工时,其拱顶沉降突然增大,表明侧壁导坑的支护不能阻止围岩的变形,当进行中导坑上台阶施工时,其拱顶沉降比以前施工步大出104倍,即趋于无穷,表明隧道已失稳,发生塌方事故。
因此,在隧道施工中,应对围岩进行更强的超前支护,改善围岩的力学参数和加强洞内支护结构,使其在后行洞施工以及以后的施工能保证隧道的施工安全。
捷联惯性系统初始对准研究
研究生签名:
导师签名:歪望塾日期:至QQ鱼生圣县
东南大学硕士学位论文
第一章绪论
1.1课题背景
由于捷联惯性系统具有较高的精度、良好的可靠性、轻巧的体积、低廉的价格等特点,因此, 很多舰载武器系统,如舰炮、雷达、导弹等均在其附近安装了捷联系统为其提供姿态基准信息。但 是另一方面,为适应现代战争的需要,越来越多的武器系统被研发出来,并且陆续装备到现代舰船
ate
defined.Then,the attitude update algorithms of SIS a糟studied,and the basic dynamics
equations based On geography coordinate ale introduced.At last,the en'or equations of SIS a∞ derived. 2.Kalman filter and its application in initial alignment are studied.At first,the applicationbackground
船体速度在导航坐标系上分别沿东、北、天方向的投影 纬度、经度 子午线曲率半径、与子午线垂直的法线平面的曲率半径
东向速度误差 北向速度误差 东向失准角 北向失准角 天向失准角
R砖Q罐砧《《厶%厶
名
兄、疋
彤
矾
以磊丸凹 监
纵摇角误差 横摇角误差 航向角误差 z向加速度计偏置 Y向加速度计偏置
脯
L.彤&
X向陀螺漂移 Y向陀螺漂移
不需要其它外部信息,自主性强。非自主对准可通过机电或光学方法将外部参考坐标系引入系统,
使平台对准至导航坐标系。在捷联式惯性系统的粗对准阶段,可引入主惯性系统的航向姿态信息,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
外文翻译 第1页 1.英文 Rotational Moment Analysis and Posture Rectification Strategy of Shield Machine Abstract. The rolling phenomenon of the shield body occurs frequently in the process of practice construction, which could lead to the derivation of the shield machine and increase the difficulties of the excavation control. It is mainly caused by the rotation of the cutter head. Based on this practical problem, we investigate the forces around the shield body and the cutter head. Meanwhile, the positive and negative rotary controlling techniques are developed to regulate the deviated rolling angle. These studies would provide theoretical basis to the further research about the whole postures rectification of the shield machine.
Keywords: Shield machine, Rotation moment analysis, Rectification strategy.
1 Introduction 1.1 Shield Tunneling Method Shield machine is an important technique equipment in basic construction and resource development, which is widely applied in tunnel, railroad, highway, mineral mountain etc underground construction. The shield tunneling method is a method to construct tunnel with shield machine. During shield excavation, the jack at the shield tail push the tunnel segment which had been assembled where a reaction force occurred to make the shield going forward, at the same time the excavation plane must keep stabile. Comparing with cut and cover method, shield tunneling method have some merits as follows: 1, Less occupied ground surface, less land expropriation cost. 2, The influence of weather condition is small, so there will be longer effective construction time comparatively. 3, Soft soil, sand egg soil, soft rock and the rock strata are all applicable. 4, The construction speed is quick. 5, The influence to the environment is small. According to the above merits, the shield tunneling method get extensive application. 外文翻译 第2页 1.2 Rotation Posture Rectification Position and posture of shield machine is important to precision of tunnel construction during excavation. But there must have deviation from actual position and posture to desired position and posture. So the rectification of the deviation is necessary. In this paper, we do not discuss position rectification. In posture rectification, only rotation rectification is considered. Posture of shield machine is described by three parameters: the pitching angle θp ,the yawing angle θy and the rotation angle θr. The pitching angleθpis the angle between
shield machine axis and horizontal plane. The yawing angle is the angle between shield machine and vertical plane through the shield machine axis. The rotation angle is the angle that the shield machine rotates on the shield machine axis. In the following description, replace θp with θ. To illustrateθ, the following coordinate system is established.
Fig. 1. Coordinate systems are established The global coordinate system CE is selected so that the z axis is vertically downwards and the x and y axes are on a horizontal plane. The x, y and z axes are perpendicular to each other and follow the right-hand rule. A machine coordinate system CM is selected so that the p axis is vertically downward when the shield being not rotate and the r axis is in the direction of the machine axis. The CM
consolidate with the shield. The origin of the machine coordinate system is selected at the
center of the shield tail plane. The p , q and r axes are perpendicular to each other and follow the right-hand rule. A reference coordinate system CMV is selected so that the pv axis is through the cross-line of PV and shield tail plane and the rv axis is in the direction of the machine axis. The pv and qv axes are on the shield tail plane. The pv is the vertical plane through shield axis. The origin of the reference coordinate system is selected at the center of the shield tail plane. The pv , qv and rv axes are perpendicular to each other and follow the right-hand rule. The angle between p axis and pv axis is the rotation angle θ. The θis positive for counterclockwise rotation of shield (view from shield tail). Shield rotation posture rectification means zero θ when θ is not zero.