悬臂式掘进机液压行走系统的建模分析
悬臂式掘进机智能系统设计及其位姿估计与运动学建模

悬臂式掘进机智能系统设计及其位姿估计与运动学建模随着科技的不断进步,智能化技术在各个领域得到了广泛应用。
在工程设备领域,悬臂式掘进机智能系统的设计及其位姿估计与运动学建模也取得了显著的进展。
悬臂式掘进机是一种用于矿山、建筑等工程领域的重要设备,其主要功能是进行地下或地面的掘进工作。
然而,由于掘进机在使用过程中需要面对各种复杂的地质环境和工作要求,传统的人工操作方式已经不能满足生产效率和安全性的需求。
为了提高悬臂式掘进机的工作效率和安全性,研究人员开始引入智能化技术。
智能系统能够通过感知、决策和执行等环节,对掘进机进行自主控制和操作。
其中,位姿估计和运动学建模是智能系统的重要组成部分。
位姿估计是指通过传感器获取掘进机在空间中的位置和姿态信息。
利用激光雷达、惯性导航系统等传感器,可以实时获取掘进机的位置、姿态、速度等参数。
通过对这些参数进行分析和处理,可以准确地估计掘进机在三维空间中的状态。
运动学建模是指对掘进机的运动进行建模和分析。
通过对掘进机的结构和动力学特性进行建模,可以分析掘进机在不同工况下的运动规律和性能指标。
运动学建模可以帮助设计人员优化掘进机的结构,提高其工作效率和稳定性。
在悬臂式掘进机智能系统设计中,位姿估计和运动学建模相互配合,共同实现对掘进机的智能化控制。
通过实时获取掘进机的位姿信息,智能系统可以根据预设的工作要求,自主地调整掘进机的运动轨迹和工作参数,实现更高效、更安全的掘进作业。
总之,悬臂式掘进机智能系统的设计及其位姿估计与运动学建模是一个复杂而关键的课题。
通过引入智能化技术,可以提高掘进机的工作效率和安全性,推动工程设备领域的发展。
未来,随着智能化技术的不断进步,悬臂式掘进机智能系统将迎来更加广阔的应用前景。
悬臂式掘进机履带行走机构的设计
ABS TRA CT:By u s i n g t h e we a t h e r c i r c u l a t i o n s i t ua t i o n a n d v a r i o u s p hy s i c a l ie f l d s’ c h a r a c t e r i s t i c s , t h i s p a pe r a n a l y z e s a
气系统等部分组成 ,掘进机 由截割机构 的电机经过二级行 星减 速机驱动截割头进行截煤作业 ,截割臂 由液压系统 的升降油缸
和 回转油缸控制 ,进给作业 由行走机构的液压马达驱动履带来 实现 , 机器作业 时的支撑 由装 载机构 的铲板 和后 支撑 完成 , 截割
有西南 风急流存 在 ; 三 是从强降水 时段的涡度场 、 散度场 、 垂 直
速度场等物理量场看出 , 我市 西北 部为 辐合 区 , 这些参数 和降水
西部 为一 2 0 x 1 0 h P a / s , 也说 明西部为上升运动。
( 4 ) 从红外云图看出 , 7月 2 1日 8 时 1 5分 , 我市范 围有很强
量大小分布落 区吻合较好。
对于天气预报而言 , 日本降水传真 图和德 国数值 预报 场对
山西科技 文章编号 : 1 0 0 4 — 6 4 2 9 ( 2 0 1 3 ) 0 6 — 0 0 61 — 0 4
悬臂式掘进机液压执行元件的爬行分析及对策
简 一
一
自
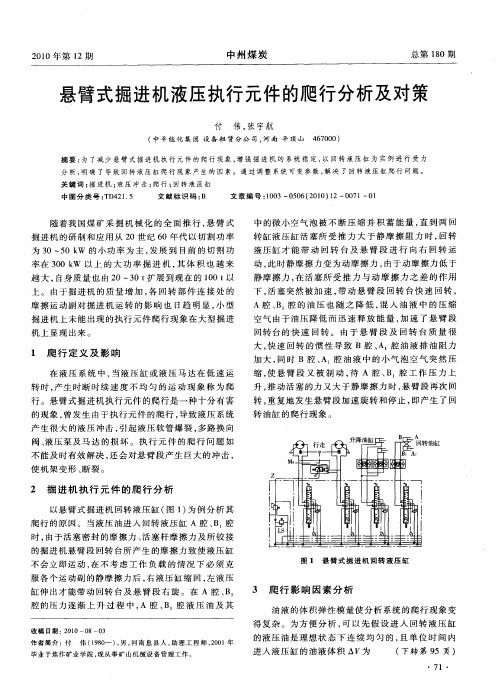
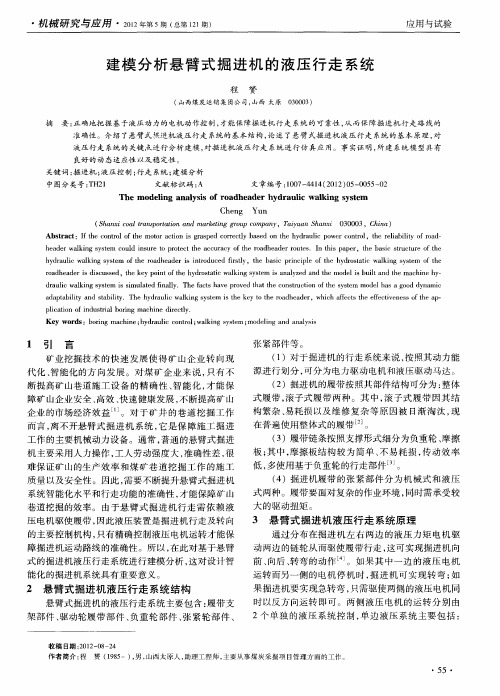
图 1 悬 臂 式 掘 进 机 回 转 液 压缸
服各个 运 动副 的静摩擦 力后 , 右液 压缸 缩 回 , 左液压 缸伸 出才能 带动 回转 台及 悬 臂段 右旋 。在 A腔 、 B 腔 的压力逐 渐 上 升 过 程 中 , A腔 、 腔 液 压 油及 其 B
行 。悬臂 式掘进 机执 行元 件 的爬 行是 一种 十分 有害
的 现 象 , 发 生 由 于执 行 元 件 的爬 行 , 致 液 压 系 统 曾 导
产 生很大 的液 压冲击 , 引起 液压 软管 爆裂 , 多路换 向
阀 、 压 泵 及 马 达 的 损 坏 。执 行 元 件 的 爬 行 问 题 如 液
不 能及时 有效解 决 , 会对 悬臂段 产 生巨大 的 冲击 , 还 使 机架变 形 、 裂 。 断
.
酪 .一兰 B = J l = _ A
一
转油缸
M6 .
匝 里
{ —
2 掘 进 机 执 行 元 件 的爬 行 分 析
以悬臂 式掘 进机 回转 液压缸 ( 1 为 例 分析 其 图 )
收稿 日期 : 0 0—0 0 21 8— 3
3 爬 行 影 响 因素 分 析
悬臂式半煤岩掘进机行走机构设计说明书
1 绪论悬臂式掘进机作业线主要由主机与后配套设备组成。
主机把岩石切割破落下来,转运机构把破碎的岩渣转运至机器尾部卸下,由后配套转载机、运输机或梭车运走。
悬臂式掘进机的切割臂可以上下、左右自由摆动,能切割任意形状的巷道断面,切割出的表面精确、平整,便于支护。
履带式行走机构使机器调动灵活,便于转弯、爬坡,对复杂地质条件适应性强。
悬臂式巷道掘进机具有掘进速度快,巷道成形好,便于与其它设备配套组成综掘作业线以及成本较为合理等优点, 因而应用广泛。
近年来掘进机不仅广泛用于煤及软岩道的掘进,在中等硬度的半煤岩巷道掘进中也获得良好的技术经济效果。
国外的某些重型掘进机已能切割抗压强度达170MPa 的硬岩。
据统计,目前国外各主要产煤国采用掘进机掘进的巷道占采准巷道的40%以上。
而我国综掘比率为8%左右,与国外先进水平相比尚存在很大差距, 与我国煤炭生产的需要, 特别是现代化高产高效矿井建设的需要也是极不相适应的, 因此, 我国掘进机的研制开发以及推广应用, 还需作大量工作。
1.1国外掘进设备及综掘技术发展现状-1.1.1 切割能力稳定提高掘进机经历了切割软煤、硬煤及半煤岩的过程。
近期一些重型掘进机已能切割硬岩。
目前国外矿山应用的各种型号的悬臂式掘进机约4 000余台。
一般来说,这类悬臂式掘进机的重量为20~160t,最大切割功率已达408kW,切割岩石的抗压强度最高可达170MPa。
据报道, 日本成功地使用TM 60K 型掘进机掘进全岩巷引水隧道, 岩石硬度高达170~200M Pa。
目前最大的WAV 408 型掘进机重达160 t, 切割功率可达408 kW , 定位切割断面可达m。
87.521.1.2 机器的可靠性高先进的制造技术为基础, 从原材料质量到零部件的加工精度都能严格控制, 又有优越的国际协作条件, 选购外购外协件的范围宽广, 有效地保证了主机的质量水平。
此外, 近年来广泛地采用了可靠性技术, 其突出表现为简化机械结构、采用降额设计。
掘进机行走机构的液压系统设计
掘进机行走机构的液压系统设计
简介
本文档旨在介绍掘进机行走机构的液压系统设计。
液压系统在
掘进机的行走过程中扮演着重要的角色,确保机器的稳定运行和高
效工作。
液压系统的组成
掘进机的液压系统主要由液压泵、液压马达、液压缸等组件组成。
其中液压泵负责将液压油压力加大,液压马达将液压能量转化
为机械能,液压缸则用于对行走机构进行动力驱动。
液压系统的设计
在设计掘进机行走机构的液压系统时,需要考虑以下几个方面:
1. 负载需求:根据掘进机的行走负载需求,选择合适的液压泵
和液压马达。
考虑负载的大小、速度和频率等因素,确保液压系统
可以提供足够的动力。
2. 系统的可靠性:液压系统的可靠性对于掘进机的安全运行至
关重要。
在设计过程中,应选择优质的液压元件,并确保系统的密
封性能良好。
3. 能效优化:掘进机行走过程中的能耗是一个重要的考虑因素。
在设计液压系统时,可以采用变量泵供油系统,通过根据负载需求
调整流量,来提高整体能效。
4. 系统保护:为了保护液压系统,防止因过载或其他异常情况
而损坏,可以添加液压阀、传感器以及报警装置等。
确保在出现异
常情况时可以及时采取相应措施。
结论
掘进机行走机构的液压系统设计是确保掘进机稳定运行和高效
工作的关键。
在设计过程中,需要考虑负载需求、系统可靠性、能
效优化以及系统保护等因素。
通过合理设计和选择优质的液压元件,可以满足掘进机行走机构的液压系统需求。
建模分析悬臂式掘进机的液压行走系统
h d a l l i g s s m f h o d e d r i i t d c d f sl ,t e b sc p i cp e o h y r sai l i g s se o h y r u i wak n y t o e r a h a e s nr u e rt c e t o i y h a i r i l ft e h d o tt wak n y ・ 0 年 期( 第1 期) 21 第5 总 2 2 1
应用与试验
建 模 分 析 悬 臂 式 掘 进 机 的液 压 行 走 系统
程 赘
( 西煤 炭运 销 集 团公 司 , 西 太 原 山 山 000 ) 30 3
摘
要: 正确地把 握基 于液压动 力的电机 动作控 制 , 才能保 障掘进 机行走 系统 的可靠性 , 而保 障掘进机行 走路线 的 从
( h n i o l r n ot i n a kt gg op c m a y ay a h n i 0 0 0 ,C ia S a x a t s r t n a d m r i ru o p n ,T i nS a x c a p ao en u 3 0 3 hn )
良好 的 动 态适 应 性 以及 稳 定性 。
关键 词 : 进 机 ; 压控 制 ; 走 系统 ; 模 分 析 掘 液 行 建
中图分类号: H 1 T 2
文献标识码 : A
文章编号 :0 7 4 1 (0 2 0 — 0 5 0 10 — 4 4 2 1 )5 0 5 — 2
Th od lng a l ss o oa he de dr ulc w aki yse em ei na y i f r d a r hy a i l ng s t m Ch n ̄ Yu e n
EBZ160D悬臂式掘进机液压系统
EBZ160D悬臂式掘进机 液压系统内容第一部分 z 第二部分 z 第三部分 z 第四部分 z 第五部分z基本原理 液压系统构成 液压系统的调整 液压常见故障原因及处理方法 油液使用及污染度控制第 部分 第一部分基本原理EBZ160D掘进机液压系统原理简介主阀芯控制方式 主阀芯控制 式:液压比例先导控制 液 先 控制(液压、手动、 液 电液等;开关、比例、伺服、数字;先导与直动;) LRDS+LRDS双变量负载敏感(也叫负荷传感) 液压系统。
主控阀部分采用带压力补偿(阀口前后压差基本不 变,流量不受负载变化影响,调速阀)与负载敏感 (压力和流量按需供给)功能的比例阀,这样就与 掘进机主泵构成了先进的功率适应系统。
LRDS:一个 一个主泵采用带压力切断功能的 主泵采用带压力切断功能的 恒功率负载敏感技术 (LR: 恒功率负载敏感技术。
(LR 恒功率; 恒功率 D: 压力切断;S:负载敏感)手动液压比例先导:指手动先导阀部分采 手动液压比例先导:指手动先导阀部分采 用比例减压阀,减压输出压力信号与手动 输入的机械信号(阀芯行程)呈线性比例 关系。
由于手动先导阀的压力输出曲线包 括 主阀 作的 力曲线 所 减 阀输 括了主阀动作的压力曲线,所以减压阀输 出的压力信号的大小控制对应的主阀芯的 信 制 全行程,再加上主阀中压力补偿阀的作用, 实现了操作者对液压执行机构的真正意义 上的与外负载无关的比例控制。
负荷传感工作过程简述开机后无液压动作时,主阀中的 机 液 作时 主阀中的LS信号为零,主 信 为 主 泵检测到这一信号后在压差控制阀作用下,泵处 于“低压”“ 低压”“零流量 零流量” ”待命状态。
低压指设置的 控制压差18bar,零流量指排量变为维持泄漏量 后保 18bar时的流量。
后保压 时的流量 有一个液压动作时,主阀中LS信号把这一回路的 外负载压力传感到泵的控制阀组中,泵为了维持 压差平衡,进行变量,直到恢复平衡。
掘进机行走机构分析及设计2013
履带板是履带总成的重要组成部分,对履带板的要求:各节履带板之间应有可靠的连接;履带板和驱动轮的啮合要可靠;履带板与地面应有足够的附着力;履带板要硬度高、耐磨损、耐冲击。
本科毕业设计(论文)学生诚信承诺保证书
本人郑重承诺:《悬臂式掘进机行走机构工作分析及设计》毕业设计(论文)的内容真实、可靠,系本人在指导教师的指导下,独立完成。如果存在弄虚作假、抄袭的情况,本人承担全部责任。
学生签名:
年月日
辽宁工程技术大学
本科毕业设计(论文)指导教师诚信承诺保证书
本人郑重承诺:我已按学校相关规定对同学的毕业设计(论文)的选题与内容进行了指导和审核,确认由该生独立完成。如果存在弄虚作假、抄袭的情况,本人承担指导教师相关责任。
早期的悬臂式掘进机行走,装载机构主要采用电动方式,如匈牙利的F6-HK、前苏联的4IIY、奥地利的AM50等。随后出了抗冲击易实现无级变速的液压系统在行走机构既用油马达来拖动的技术开始占主流。如日本三井三池公司的S100、S200,奥地利奥钢联公司的AM100,英国多斯科MK2A、MK2B等。为了适应高产高效的发展和实现矿井集约现代化的需要,积极采用新技术,就要求大力发展综合机械化掘进。综合掘进是高效安全的掘进方法,而悬臂式掘进机是综合机械化掘进中的重要设备。
1.1.3
19世纪70年代,英男为修建海底隧道,研制出了第一台掘进机,美国在20世纪30年代发明悬臂式掘进机,并将其应用于采矿作业,取得了良好的效果,此后,各国以煤巷为作业对象研制了各种类型的悬臂式掘进机,随着社会经济的发展,人们对煤炭矿石的需求越来越大,悬臂式掘进机的研究与发展也得了空前的进步。发展至今,悬臂式掘进机已呈现出系列化和多样化,英国、前苏联、德国、美国、日本、奥地利等10几个国家的20多家公司,先后成功研制出70多种机型。目前在国外,悬臂式掘进机被广泛用于硬度系数人低于80MPa的半煤岩采准巷道的掘进,同进也有不少悬臂式掘进机在全岩巷的掘进中取得了不错成效。
EBZ160悬臂式掘进机液压系统设计
d o i : 1 0 . 1 1 8 3 2 / j . i s s n . 1 0 0 0 - 4 8 5 8 . 2 0 1 5 . 0 2 . 0 2 6
液 压 与 气动
1 0 3
E B Z 1 6 0悬 臂 式 掘 进 机 液压 系统 设 计
费 烨。 孙 波 。林 闯
1 1 0 1 6 8 ) ( 沈 阳建筑大学 交通与机械工程学 院 , 辽宁 沈阳
摘
要: 介 绍 了悬臂 式掘 进机 组 成和 工作 过程 , 针 对其 不 同工作 机 构 工 况复 杂 、 动 作特 性 及 功 率 消耗 各
异 的特 点 , 设计 了 E B Z 1 6 0悬臂 式掘 进 机 的 液压 系统 , 并 以行 走机 构 液 压 回路 为例 , 给 出 了元 件 参数 和 型 号
速度 快 、 适应 性强 、 调 动灵 活 的优 点而 在井 下机 械化 采 煤 作业 中得 到 了广 泛 应 用 … , 且有 向大功率 、 重 型 化 发 展 的趋势 。这 类 掘进 机工 作 机 构 中 , 除截 割 头 旋 转
用 电机 驱 动外 , 其余 均 为液压 技术 实 现 。因此 , 对 掘进
的计 算和 选择过 程 , 最后 对 系统技 术特 性 进行 了分析 。 关键 词 : 悬臂 式掘进 机 ; 液 压 系统 ; 设 计 中图 分类 号 : T H1 3 7 文献 标 志码 : B 文章 编 号 : 1 0 0 0 - 4 8 5 8 ( 2 0 1 5 ) 0 2 - 0 1 0 3 - 0 4
h y d r a ul i c c i r c u i t . Fi na l l y,t h e s y s t e m t e c h n i c a l c h a r a c t e r i s t i c s a r e a n a l y z e d. Ke y wo r ds:c a n t i l e v e r t un n e l i n g ma c hi n e,h y d r a u l i c s y s t e m ,d e s i g n
掘进机的总体和行走机构设计
掘进机的总体和行走机构设计目录第一章概述 (1)1.1国内外悬臂式掘进机发展历史和现状 (1)1.1.1国外悬臂式掘进机发展历史和现状 (1)1.1.2国内悬臂式掘进机发展历史和现状 (2)1.1.3国内悬臂式掘进机目前存在问题 (2)1.2悬臂式掘进机发展趋势 (2)1.3悬臂式掘进机主要组成部分 (3)1.4 EBJ─120TP型掘进机简介 (4)1.4.1 EBJ─120TP概述 (4)1.4.2 EBJ─120TP主要技术参数 (5)第二章总体设计 (8)2.1总体布置 (8)2.2掘进机各组成部分基本结构设计 (8)2.2.1截割部 (8)2.2.2装载部 (9)2.2.3刮板输送机 (10)2.2.4行走部 (11)2.2.5机架和回转台 (11)2.2.6液压系统 (11)2.2.7电气系统 (11)第三章行走部设计 (12)3.1行走部设计原理 (12)3.2行走部基本参数的确定 (12)3.3履带的设计 (13)3.4驱动元件的选择 (13)3.5链轮设计 (15)3.6行走架设计 (120)3.7导向张紧装置设计 (17)第四章减速器设计和校核 (18)4.1传动类型的选择 (18)4.2传动比计算 (18)4.3配齿计算 (19)4.4齿轮模数选择 (22)4.5齿轮几何尺寸和啮合参数计算 (23)4.6传动效率计算 (25)4.7齿轮强度校核 (230)4.7.1齿轮材料热处理简介 (230)4.7.2齿轮弯曲强度校核 (27)4.8其它零件校核 (33)4.8.1减速器轴校核 (33)4.8.2轴承校核 (41)4.8.3键校核 (42)第五章检修及维护保养 (45)5.1机器检修 (45)5.2机器维护和保养 (47)5.2.1机器日常维护保养 (48)5.2.2机器定期维护保养 (48)5.2.3润滑 (49)5.2.4电气 (53)5.3机器常见故障原因及处理方法....................................................... :53 结论. (58)参考文献 (59)英文原文 (60)中文译文 (70)致谢 (80)摘要EBJ-120TP型掘进机是一种中型悬臂式掘进机,主要用于中型煤巷及半煤岩巷的掘进作业。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
An lss a d Mo el g o o Ro dh a er S ay i n d i fBo m a e d ’ n Hy aui akn sem dr l W lig Sy t c
液 压行 走 系统 的工作原 理 , 立 系统数 学模 型 , Smuik环 境 下 , 系统 的稳定 性进 行 分 析。 结 建 在 i l n 对
果表明, 所建 模 型具有 较好 的动 态性 能和较 高 的稳 态精度 。 关键 词 : 悬臂 式掘进机 ;液压 系统 ;数 学建模 ;仿真
・
2 8・
煤
矿
机
电
21 年第4期 01
悬 臂 式 掘 进 机 液压 行 走 系统 的建 模 分 析
王福忠 , 宋珍珍
( 河南 理工 大学 ,河南 焦作 44 0 ) 5 0 0
摘
要 : 正确控 制液 压马达 动作 是 】 导掘进 机 沿设 计路 线 准 确运 动 的关 键 。根 据 悬臂 式 掘进 机
号 电流 的大 小控 制 阀 口开度 , 改变 液压 马达 的流量 ,
实现对 掘进 机行 走速度 的控 制 。 2 液压 行走 系统 数学模 型 2 1 电液 比例 阀的负载 流量 方程 .
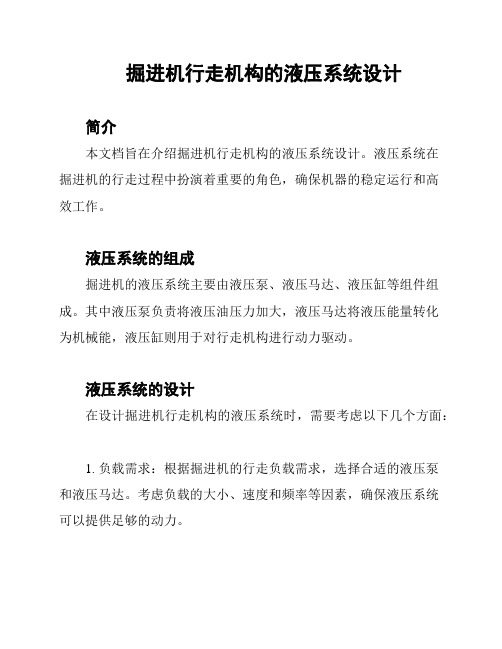
1 一电动 机 ; 2一 量 泵 ; 定 3一溢 流 阀 ; 4一单向 阀
5一比例方 向阀; 6一液压 马达
图 1 悬臂式掘进机行走液压 系统
式 中 : Q —— 负 载流量 变化 , s △ m/;
— —
阀的位移 变化 , m; m 流量增 益 ;
电液 比例 阀的负载 流量 方程可 以下 式表 示 :
△ L=kA 一k△ L Q qx o p () 1
△ p —— 负载 压力 变化 , / Nm ;
t—— 折 算到 马达 轴上 的总惯 量 ,g・T ; , k I I
曰 —— 黏性 阻尼 系数 , ・ ・ /a ; N m srd
G —— 扭 簧 刚度 , ・ /a ; N m rd
— —
失 , 略流 体质 量效 应和 管道 动态 影 响 ; 忽
2 )液 压 马达 的油 温和体 积 弹性模 量是 常数 ; 3 )液 压 马达 的 内外 泄漏 为层 流流 动 ; 4 )液体 有 可压缩 性 ;
压 马达 反 向驱 动 , 则掘进 机转 弯或 急转 弯 。
两 侧液 压 马 达 的控 制 系统 完 全一 样 , 图 1 如 所 示 。当 比例 方 向阀 阀芯位 于左边 时 , 压马 达正转 ; 液
阀芯位 于右 边时 , 液压 马达 反转 ; 当阀芯位 于 中间 而
位置 , 液压马达处 于静止状态。比例方 向阀根据信
— —
21 01年第 4期
流量 压力 系数 。
煤
矿
机 的理论 扭矩 , ・ l N n;
・9・ 2
—
—
2 2 液压 马达 的流量连 续方 程 . 对液 压马 达 的特性 作如 下假 设 : 1 )所 有 液压管 道短 而粗 , 略管 道 内 的摩擦 损 忽
WAN G Fu z o g,SON G Zhe —h n —h n nz e
( e a o t h i U ie i , iou 5 00, hn ) H nnPl e nc nvr t J zo44 0 C ia yc sy a
Ab ta t: Th o r c to o to fh d a l tri r ca o se rt e r a h a e v i g ao gt e sae s rc e c re tmo in c n rlo y r u i moo sc u i lt te h o d e d rmo e n l n h ttd c p t . Ac odi o t e wo kng p i cpl ah c r ng t h r i rn i e,s tu h t e tc lmo e fb o r a h a e S h d a lc wak n e p t e mah mai a d lo o m o d e d r’ y r u i l i g
作用 于马 达轴 的负 载扭矩 , ・ N m。
液 压行走 机构 是悬臂 式 掘进机 的重要 部 件 。对
其进 行 分析建 模 , 是研究 其 动态性 能 的基 础 。
1 液压 行走 机构 原理 掘 进机 液压 行走机 构用 低速 大扭矩 马达 , 、 左 右 分 别单 独驱 动 。左 、 液压 马达 同时驱 动 , 掘进 机 右 则 前进 或 后退 。单 独驱 动一 侧 液压 马达 , 者 两侧 液 或
s se . Th i l t n a ay i fis sa lt S c rid o ti i ln n io m e t T e u t h w h tt e ytm e smu a i n l ss o t tbi y i a re u n S mu i k e vr n n . he r s ls s o t a h o i
mo e a a rd n mi e fr n e a d h g t a y a c r c d lh sf i y a c p ro ma c n ih se d c u a y.
K y r s b o r a h a e ;h d a l y tm ;mah ma ia d l i l t n e wo d : o m o d e d r y r ui s se c t e t lmo e ;smu a i c o