第3章__电动机转矩转速控制_1_
运动控制_第3章____转速、电流双闭环直流调速系统

U
*
im
,转速外环呈开环状态,
转速的变化对系统不再产生影响。在这种情况下,电流负反
馈环起恒流调节作用,转速线性上升,从而获得极好的下垂
特性,如图 3-5中的AB段虚线所示。
第二十一页,编辑于星期三:九点 二十二分。
第 3章 转速、电流双闭环直流调速系统
此时,电流
I
d
U* im ?
?
I dm
,Idm 为最大电流,是由设
差调节。
第二十页,编辑于星期三:九点 二十二分。
第 3章 转速、电流双闭环直流调速系统
1) 转速调节器饱和
在电动机刚开始起动时,突加阶跃给定信号 U*n,由于
机械惯性,转速 n很小,转速负反馈信号 Un很小,则转速偏
差电压 ΔUn=U*n-Un>0很大,转速调节器 ASR 很快达到饱和
状态, ASR的输出维持在限幅值
图 3-5 双闭环直流调速系统的静特性
第二十三页,编辑于星期三:九点 二十二分。
第3章 转速、电流双闭环直流调速系统
2) 转速调节器不饱和
当转速n达到给定值且略有超调时 (即n>n0),ΔUn=
U*n-Un<0,则转速调节器 ASR的输入信号极性发生改变,
ASR 退出饱和状态,转速负反馈环节开始起转速调节作用,
用以调节起动电流并使之保持最大值,使得转速线性变化, 迅速上升到给定值; 在电动机稳定运行时,转速调节器退 出饱和状态,开始起主要调节作用,使转速随着转速给定信 号的变化而变化,电流环跟随转速环调节电动机的电枢电流 以平衡负载电流。
第六页,编辑于星期三:九点 二十二分。
第 3章 转速、电流双闭环直流调速系统
器ACR和转速调节器 ASR的输入电压偏差一定为零,因此,
第三章 同步电动机的变频调速控制

30年代
铝镍钴、铁氧体
差
易去磁
1
2 3
90年代 60年代 后期
铁氧体 稀土永磁: SmC05
3.6~4.0 24 33 38~40
价格低 (稀土的1/10) 热稳定性好 不怕去磁 钴含量高、价格高
70年代 初期
第三代
稀土永磁: SmC017 稀土永磁: 钕铁硼 Nd-Fe-B
我国储量世界第一, 温度可达200℃?
图示位置是转子磁极轴线 从某相绕组轴线转过30°的位 置,在此瞬间触发该相晶闸管, 从产生转矩的角度看是最有利 的。在此位置下,在绕组通电 的1/3周期里,载流导体正好 处于比较强的磁场中,所产生 的转矩平均值最大,脉动最小。 从时间相位上看,晶闸管触发 瞬间正好是该感应电势交变过 零之后的30°相位处,习惯上 将此点选作晶闸管触发相位的 基准点,称为空载换流超前 角 。
结 论
0 0 、 三相式,对转矩最为有利。
矛盾:
晶闸管靠反电势自然换流,要求 0 超前,目前常取 0 60 ,或按负载的 动态调节。转矩脉动大:凸极式无换向电 机中,还存在磁阻转矩,当 超前时为 0 负值,将使输出转矩减小。
二、逆变器晶闸管的换流问题
问题的提出: 直流无换向器电机的晶闸管直接接在直流电 源上,导通后无法自行关断,换流困难。必须采取 特殊的换流措施。 解决: 在过激状态下向逆变器提供超前的无功电流, 可利用电机的反电势来实现自然换流。
优点: (1) 只要精确地控制变频电源的频率就能准确控 制转速,无需速度反馈控制。 (2) 转矩干扰只影响同步电动机的功角,不影响 电机的转速可以在极低的转速下运行,调速范围 较宽。 (3)可以调节转子励磁来调节电机的功率因数,甚 至可在 下运行。 (4) 运行在超前功率因数下,有可能利用电动机 的反电势实现负载换流,克服强迫换流的弊病 (晶闸管)。 缺点:同步电机本身结构稍微复杂
第3章 直流电机
第三章 直流电机一、填空1. 直流电机的电枢绕组的元件中的电动势和电流是 。
2. ★★一台四极直流发电机采用单叠绕组,若取下一支或相邻的两支电刷,其电流和功率 ,而电刷电压 。
3. ★一台并励直流电动机,如果电源电压和励磁电流f I 不变,当加上一恒定转矩的负载后,发现电枢电流超过额定值,有人试在电枢回路中接一电阻来限制电流,此方法 。
串入电阻后,电动机的输入功率1P 将 ,电枢电流a I ,转速n 将 ,电动机的效率η将 。
4. ★一台并励直流电动机拖动恒定的负载转矩,做额定运行时,如果将电源电压降低了20℅,则稳定后电机的电流为 倍的额定电流(假设磁路不饱和)。
5. 并励直流电动机,当电源反接时,其中a I 的方向 ,转速方向 。
6. 直流发电机的电磁转矩是 转矩,直流电动机的电磁转矩是 转矩。
7. 一台串励直流电动机与一台并励直流电动机,都在满载下运行,它们的额定功率和额定电流都相等,若它们的负载转矩同样增加0.5,则可知: 电动机转速下降得多,而 电动机的电流增加得多。
8. ★电枢反应对并励电动机转速特性和转矩特性有一定的影响,当电枢电流a I 增加时,转速n 将 ,转矩T e 将 。
9. 直流电动机电刷放置的原则是: 。
10. 直流电动机调速时,在励磁回路中增加调节电阻,可使转速 ,而在电枢回路中增加调节电阻,可使转速 。
11. 电磁功率与输入功率之差,对于直流发电机包括 损耗;对于直流电动机包括 损耗。
12. ★串励直流电动机在负载较小时,a I ;当负载增加时,T e ,a I ;n 随着负载增加下降程度比并励电动机要 。
13. ★一台p 对磁极的直流发电机采用单迭绕组,其电枢电阻为a r ,电枢电流为a I ,可知此单迭绕组有 条并联支路,其每条支路电阻为 ;若为单波绕组其每条支路电阻为 ,电枢电阻为 。
14. 并励直流电动机改变转向的方法有 , 。
15. 串励直流电动机在电源反接时,电枢电流方向 ,磁通方向 ,转速n 的方向 。
第3章 步进电动机的控制-1

这种反应式步进电动机的步距角较大,不适合一般用途的要求。
4.小步距角步进电动机
图3-1所示为三相反应式步进电动机。设m为相数,z为 转子的齿数则齿距:
tb 360 z
因为每通电一次(即运行一拍),转子就走一步,各 相绕组轮流通电一次,转子就转过一个齿距。故步距角:
b
齿距 拍数 齿距 Km 360 Km z
通电方式: 从一相通电改换成另一相通电,即通电方式改变一次叫 “一拍”。步进电动机有单相轮流通电、双相轮流通电和单 双相轮流通电的方式。
3.多段反应式步进电机结构及工作原理
前面介绍的单段反应式步进电机是按 径向分相的,此外,还有一种反应式 步进电机是按轴向分相,这种步进电 机又称为多段反应式步进电机。 多段反应式步进电机是沿轴向分成磁 性相对独立的几段,每一段都有一组 励磁绕组,形成一相,因此,三相电 动机有三段,其结构如图3-2所示。 图3-2 三段三相反应式步进电动 机结构原理图
一、步进电动机的种类
1.按运动方式来分:分为旋转运动、直线运动、平面运动(印刷绕组式)和 滚切运动式步进电机。 2.按工作原理来分:分为反应式(磁阻式)、电磁式、永磁式、永磁感应式 (混合式)步进电机。 3.按其工作方式来分:分为功率式和伺服式。前者输出转矩较大,能直接带 动较大的负载;后者输出转矩较小,只能带动较小的负载,对于大负载需通 过液压放大元件来传动。 4.按结构来分:分为单段式(径向式)、多段式(轴向式)、印刷绕组式。 5.按相数来分:分为三相、四相、五相、六相等。 6.按使用频率来分:分为高频步进电机和低频步进电机。 不同类型步进电机其工作原理、驱动装臵也不完全一样,但其工作过程 基本是相同的。
(3-2)
若通电方式和系统的传动比已初步确定,则步距角应满足:
第三章 直流电动机的电力拖动
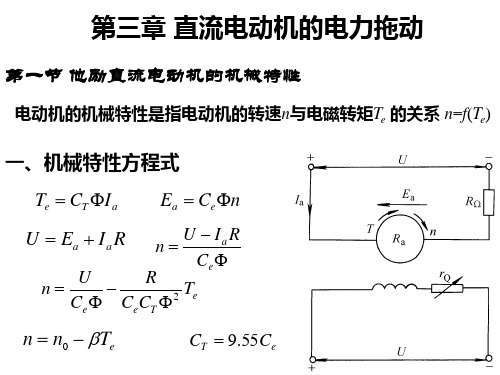
U
Ec R1
两级起动时
I1 R2 R1 I 2 R1 Ra
推广到m级起动的一般情况
I1 Rm Rm1 R2 R1
I 2 Rm1 Rm2
R1 Ra
I1 / I2 称为起动电流比
30
R1 Ra
R2 R1 Ra 2
Rm1
Rm 2
Ra
m1
Rm Rm1 Ra m
17
B、风机与泵类负载的转矩特性
通风机负载转矩与转速的大小有关,基本上与转速的平方成正比
特点: TL Kn2
通风机类负载的转矩特性
如实际生产机械中的水泵、油泵、离心式通风机等其介质 对叶片的阻力基本上与转速的平方成正比。
18
C、恒功率负载的转矩特性
特点:
TL
k
1 n
恒功率负载的转矩特性
在不同转速下,负载转矩基本上与转速成反比,其功率基本
恒转矩负载 大多数生产机械可归纳为: 风机与泵类负载
恒功率负载
14
各类生产机械的负载转矩特性 A、恒转矩负载的转矩特性
特点: 负载转矩不受转速变化的影响。在任何转速下,负载转矩
总是保持恒定或大致恒定。
反抗性恒转矩负载 恒转矩负载
位能性恒转矩负载
15
(1) 反抗性恒转矩负载的转矩特性如下图所示。
反抗性恒转矩负载的转矩特性
22000 Ω
0.174Ω
Ce N
UN
I N Ra nN
220 116 0.174 V/(r/min) 1500
0.133 V/(r/min)
理想空载点 Te 0
n
n0
UN
Ce N
220 r/min 1650r/min 0.133
第3章步进电动机的控制
升速 恒速 减速 低速
起点
终点
(时间) t
图3-24
点、位控制中的加减速控制
15
变速控制的方法有:
改变控制方式的变速控制:最简单的变速控制可利用改变步进电 机的控制方式实现。例如:对于三相步进电机系统,启动或停止时 用三相六拍,大约0.1s以后,改用三相三拍,快到达终点时再采用 三相六拍,以达到减速控制的目的。 均匀地改变脉冲时间间隔的变速控制:步进电机的加速(或减速) 控制,可以用均匀地改变脉冲时间间隔来实现。 采用定时器的变速控制:单片机控制系统中,用单片机内部的定 时器来提供延时时间。方法是将定时器初始化后,每隔一定的时间, 由定时器向CPU申请一次中断,CPU响应中断后,便发出一次控制脉 冲。此时只要均匀地改变定时器时间常数,即可达到均匀加速(或 减速)的目的。这种方法可以提高控制系统的效率。
脉冲 方向控制
步进控制器
功率放大器
步进电机
负载
图3-19 步进电机控制系统的组成
2
随着电子技术的发展,除功率驱动电路之外,其它硬件电路均可由软 件实现。采用计算机控制系统,由软件代替步进控制器,不仅简化了 线路,降低了成本而且可靠性也大为提高,同时,根据系统的需要可 灵活改变步进电机的控制方案,使用起来很方便。典型的微型机控制 步进电机系统原理图如图3-20所示。 使用微型机对步进电机进行控制有串行和并行两种方式。 步 进 电 机
6
二、步进电动机的闭环控制
在开环步进电动机系统中,电动机的输出转矩在很大程度上取决于驱 动电源和控制方式。对于不同的步进电动机或同一种步进电动机而不 同负载,励磁电流和失调角发生改变,输出转矩都会随之发生改变, 很难找到通用的控速规律,因此,也很难提高步进电机的技术指标。 闭环系统是直接或间接地检测转子的位置和速度,然后通过反馈和适 当处理自动给出驱动脉冲串。因此采用闭环控制可以获得更精确的位 置控制和更高、更平稳的转速,从而提高步进电动机的性能指标。 步进电动机的输出转矩是励磁电流和失调角的函数。为了获得较高的 输出转矩,必须考虑到电流的变化和失调角的大小,这对于开环控制 来说是很难实现的。
第3章三相同步电机
cos ϕ N
f N 单位为Hz n N单位为r/min θN
• 额定励磁电流和电压 IfN 、UfN
3-2 同步发电机的磁场
一、空载运行 n s If I=0
1、空载磁场——主磁场
I f → F f → B0 → φ 0
→ 电枢齿 路径:气隙 →电枢齿 → 电枢轭 → 磁极 主磁通 → 极身 → 转子轭 作用:在三相绕组中感应 对称电动势
k w1 N 1φ a k w1 N 1 Fa Λa (k w1 N 1 ) 2 kIΛa La = = = = = k (k w1 N 1 ) 2 Λa I I I I
ψa
二、考虑磁路饱和时 非线性,迭加原理不适用
Ff & & → F → B →Φ → E Fa
& U
& IRa
3、等效电路
& & & & & & & & E0 =U + I Ra + jIXσ + jIXa =U + I Ra + jIXs
4、同步电抗
X s = X a + Xσ
a) 反映了Φa和Φσ的作用 b) 磁路不饱和时为常数 c)
∝ f X a = ωLa ∝ (k w1 N 1 ) 2 ∝ Λ 主磁路的磁导 a
& 图示瞬间,A相绕组电动势 E0 A 达正的最大值,方向从X入,A 出。
•从导体切割磁力线分析。
(交轴)
• 从磁通的变化来分析。 A相磁通为零,电动势滞后磁 通90度。
& & B相绕组 E0 B、C相绕组电动势 E0 C 滞后A相电动势120度和240度。
现代电机控制技术第3章三相永磁同步电动机矢量控制课件
2
PMSM 的转子结构,按永磁体安装形式分类,有面装式、插入式和内装式三 种,如图 3-1、图 3-2 和图 3-3 所示。
图 3-1 面装式转子结构
图 3-2 插入式转子结构
图 3-3 内装式转子结构
(3-2) (3-3)
A LA LAB LAC iA fA
B LBA LB LBC iB fB
C
LCA
LCB
LC
iC
fC
(3-4)
式中, fA 、 fB 和 fC 分别为永磁励磁磁场链过 ABC 绕组产生的磁链。 11
同电励磁三相隐极同步电动机一样,因电动机气隙均匀,故 ABC 绕组
Lm1
1 2
Lm1
1 2
Lm1
Ls Lm1
1 2
Lm1
1 2
Lm1
1 2
Lm1
Ls Lm1
iA iB iC
fA fB fC
式中, A
(Ls
Lm1 )iA
1 2
Lm1
(iB
iC ) fA
。
(3-7)
12
若定子三相绕组为 Y 接,且无中线引出,则有iA iB iC 0 ,于是
将矢量图直接转换为 A 相绕组的相量图,或者反之。这一结论同样适用 于
PMSM,因此可将图 3-9a 所示的矢量图直接转换为 A 相绕组的相量图,如图
3-9b 所示。
17
a) 稳态矢量图
b) 相量图
图3-9 面装式PMSM矢量图和相量图
18
此时,可将式(3-17)直接转换为
U s Rs Is jωs Ls Is jωsΨ f Rs Is jωs Ls Is jωs Lm If Rs Is jωs Ls Is E0
第3章 第3节 绕线式异步电动机的调速
可直接控制转子回路内的滑差功率 实现转子串电阻调速和串级调速等调速方式 串级调速--变流装置在转子侧 调节滑差功率,调速装置容量小 3.3.1 绕线式异步电动机转子串电阻调速 1、转子串电阻调速原理 转子回路接三相附加电阻 机械特性从自然特性变为人工特性 最大转矩不变
临界转差率将随外加电阻的增大而增加
改变值,逆变器输出电压变化,实现调速
19
①第1工作区
( p 0
600 )
转子整流输出电压(考虑换流压降及电机转子侧电阻Rd):
U d 2.34sE 2 ( 3sX d
2 Rd ) I d
逆变电压:
U 2.34U 2T cos ( 3X T
2 RT )I d
1)亚同步系统--交直交 静止变流器作用: 回收利用转子绕组中的转差功 率--传递有功功率 二极管不可控整流桥把转差频率 的交流变成直流 有源逆变器把直流变成电网频 率的交流回馈电网 PCU—Power Converter Unit
2)超同步系统--交-交变流器
静止变流器能双向传递有功功率 既能运行于亚同步速度,又能运行 于超同步 同时相位能随意变化,传递无功 功率,改善功率因数
) cos1 (1
2X d Id 6 E2
)
Xd--转子不动时折算到转子侧的总漏抗 Id--负载电流即整流输出电流
E2--电机静止时转子绕组相电势
γ角与转差率s无关 随着负载电流Id的增加而增加
当 Id 6E2 4Xd 时
60
14
2、转子整流电路3种工作状态 ①第1工作状态 负载不很大,换流重叠角γ随负载上升而增大,变化范围:
忽略分母中 有
运动控制系统第3章-转速闭环控制的直流调速系统ppt
s)
闭环时,Dcl
nN s ncl (1
s)
得到 Dcl (1 K )Dop
(2-50)
闭环系统静特性和开环系统机械特性的关系
开环系统 Id n 例如:在图2-24中工作点从A A′
闭环系统 Id n Un Un Uc
n Ud0 例如:在图2-24中工作点从A B 比例控制直流调速系统能够减少稳态速降的实质在于它的自动 调节作用,在于它能随着负载的变化而相应地改变电枢电压, 以补偿电枢回路电阻压降的变化。
图2-26 积分调节器的输入和输出动态过程
图2-26 积分调节器的 输入和输出动态过程
只要ΔUn>0,积分调 节器的输出Uc便一直 增长;只有达到 ΔUn=0时, Uc才停止 上升;只有到ΔUn变 负, Uc才会下降。
当ΔUn=0时, Uc并 不是零,而是某一个 固定值Ucf
突加负载时,由于Idl的 增加,转速n下降,导 致ΔUn变正,
由式(2-48)可得
K
nop
1
275
1 103.6
ncl
2.63
则得
Kp
K
K s / Ce
103.6 30 0.015 / 0.2
46
即只要放大器的放大系数等于或大于46。
3.1.3 闭环直流调速系统反馈控制规律
(1)比例控制的反馈控制系统是被调量有 静差的控制系统 比例控制反馈控制系统的开环放大系数值 越大,系统的稳态性能越好。 但只要比例放大系数Kp=常数,开环放大 系数K≠∞,反馈控制就只能减小稳态误差, 而不能消除它, 这样的控制系统叫做有静差控制系统。
电力拖动自动控制系统 —运动控制系统
第3章
转速闭环控制的 直流调速系统
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2
L2 I 2
§3.1.5
电动机的一般数学模型
电压平衡方程:任一回路的外加电压等于回路电阻上的压降 与感应电动势之和。
j dik j u j rji j ( , j ) , k 1 ik dt
n
j 1,, n
转矩平衡方程:电磁转矩减去负载阻转矩后的剩余转矩用于 加速电动机轴上的惯性负载。
转差率为旋转磁场的同步转速和电动机转速之差。即:
(转差率最大) 电动机起动瞬间: n 0, s 1 转子最大转速 n n1,s 0(转差率最小)
s范围: 0 s 1
异步电机运行中:
s 1 ~ 9%
n1 n 60 f1 n1 (转/分) s 100 % n p
W
' m 2 / 4, t 2
1 2 L0 I 2
电的能量消耗
d( t ) ( L0 I sin t 2 L2 I cos 2 t cos t L2 I sin 2t sin t )d(t ) I ( L0 sin t 2 L2 cos t 4 L2 cos3 t L2 cos t sin 2 t )d( t )
0
N H lRd 1 0 1 0 r 2 N 2 0 H r lRd 其计算结果分别为 1 L1i1 Lmi2 2 Lmi1 L2i2
' m i ' '
W 2 Tem L2i sin 2
' m
§3.1.4
能量转换关系
机械能与电能的转换关系:
dWm
' dWm
i
j 1 N j 1
N
j
d
j
Tem d
j
j
di j Tem d
d 0
蜒 i d
j 0 N j
N
T T
em
① 转子和定子的导磁率足够高,使得
在他们内部的磁阻与气隙磁阻相比小
得可以忽略不计。 ② 气隙 g 和转子半径 R 与长度l 相比
足够小,使得端部的杂散磁场和气隙
磁场沿径向的变化可以忽略不计; ③ 嵌线槽的宽度和深度在圆周和径向
两个方向对磁场的影响都可以忽略不
计。
四个区域的磁场强度
N1i1 N 2i2 , 2g N i N 2i2 Hr 1 1 , 2g N i N 2i2 Hr 1 1 , 2g N1i1 N 2i2 Hr , 2g Hr
电动机转速和旋转磁场同步转速的关系
电动机转速(额定转速):
n
电机转子转动方向与磁场旋转的方向一致,
但
n n1
异步电动机
提示:如果
n n1
转子与旋转磁场间没有相对运动 无转子电动势(转子导体不切割磁力线) 无转子电流 无转距
转差率
( s ) 的概念:
n1 n s 100 % n 1
Z'
iC
iB
X A' Z' X' C' Y Y' Z B' B C
C'
X'
N
B
S
S
N
A'
Y
X
B'
C
Im
i A i B iC
t
Z
t 0
极对数
p2
极对数和转速的关系
A Y'
Z
A
C'
X'
N
B
30
C S'
NZ
n0
S
S
N
A'
Y
X'
X
X
B'
C
ZN '
C S
Z'
t 0
1
n1 f1 p 60
转子感生电流的频率:
n1 n n1 n n1 f2 p p sf1 n1 60 60
例1:三相异步电动机 p=3,电源f1=50Hz,电机额定 转速n=960r/min。 求:转差率s,转子电动势的频率f2
60 f1 60 50 1000r / min 同步转速: n1 p 3
d 定子边: u1 i1 R1 e1 e1 N1 dt u1 N1Φm1cos1t 设: Φmsin1t 则:
R1
i2 e2
R2
u1 N1Φm1cos1t
u1
i1
e1
U1 N1Φm1 / 2 N1Φm 2f1 / 2 U1 4.44 f1 N1Φm Φm 4.44 f1 N1
d ( J ) Tem ( , i, , t ) TL ( , , t ) dt
d dt
磁极旋转
导线切割磁力线产生感应电动势
e B l v
磁感应强度 导线长
(右手定则)
切割速度
闭合导线产生电流 i
N
通电导线在磁场中受力
n1 f
f B l i
(左手定则)
蜒
j 0
j
di j
em
d 0
磁链
Li ( L0 L2 sin 2t ) I cost
1 W ( L0 L2 sin 2 t ) I 2 cos 2 t 2
' m
磁场同等能量
电磁转矩
Tem L2 I 2cons2t cos2 t
W
' m / 4, t 0
第3章
电动机转矩转速控制
本章主要内容
§ 3.1 § 3.2 § 3.3 § 3.4 § 3.5 § 3.6 § 3.7 § 3.8 § 3.9 旋转电动机基本原理 直流步电动机原理与特性 直流电动机驱动电路 直流电动机转矩转速控制 无刷直流电动机调速系统 永磁同步电动机矢量控制 交流感应电动机原理与特性 交流感应电动机变频调速 交流感应电动机矢量调速
改变电机的旋转方向:换接其中两相。
旋转磁场的转速大小
一个电流周期,旋转磁场在空间转过360°
电流频率为 f Hz,则磁场1/f秒旋转1圈,每秒旋 转f圈。每分钟旋转:
n1 60 f (转/分)
n1称为同步转速
f 50Hz, n1 3000 转/ 分
极对数(P)的概念
iA
A Z X Y B
电磁转矩
2 L0 N1 N 2i1i2 , ' Wm Tm 2 L0 N1 N 2i1i2 , 0 0
§3.1.3
变磁组电动机
L L0 L2 cos2
Li ( L0 L2 cos2 )i
1 W Li di ( L0 L2 cos 2 )i 0 2
电动机的分类
异步电动机 交流电动机 同步电动机
鼠笼式 绕线式
固定磁阻
直流电动机
他励、异励、串励、复励
电动机
变磁阻
开关磁阻电机 变磁阻步进电机
本章重点讨论内容:
固定磁阻电动机的基本结构、工作原理、 机械特性、数学模型以及转矩和转速控制问题
§3.1
旋转电动机基本原理
磁铁
磁场旋转
n1
N
f
n
e i
S
e方向用 右手定则 确定
同理分析,可得 其它电流角度下 的磁场方向:
iA
iB
iC
t
Im
n1
A Y CS X
60
Z
n1
Y C
A Z
n1
Y C
A Z B X
N
B
B X
t 60
t 120
t 180
旋转磁场的旋转方向 旋转方向:取决于三相电流的相序。
iA
iB
iC
t
iA
iC
iB
t
Im
Im
n1
n1
' n ik Wm (i , ) Tem (i1,, ik 1, ik' ,0,,0; )dik' 0 k 1 i constant
j dik j d ej dt k 1 ik dt
n
§3.1.2
固定磁组电动机
n
e i
S
1. 线圈跟着磁铁转→两者转动方向一致 结论: 2. 线圈比磁场转得慢
n n1
异步
n1 f
N
n
e i
S
三相异步机的结构
三相定子绕组:产生旋转 磁场。 转子:在旋转磁场作用下, 产生感应电动势或 电流。 线绕式 鼠笼式 转子
定子绕组 (三相)
A Y
定子
Z
C
B
X
鼠笼转子
机 座
§3.1.6三相异步电动机的工作原理
E1 U1 4.44 f1 N1Φm
R1
i2 e2
R2
E1 U1 4.44 f1 N1Φm
同理可得:
u1
i1
e1
E2 4.44 f 2 N2Φm
f 2 :转子感应电动势的频率 N 2 :转子线圈匝数 f2
取决于转子和旋转磁场的相对速度
f 2 sf1
转子电流
R1
i2 e2
R2
A
Y
N
Z
iC C
iB
C
B
S
X
此种接法下,合成磁场只有一对磁极,则极对数为1。 即: