基于三星S5PV210的智能割草机控制系统设计
ZTR割草机自动变割幅结构及控制系统设计

ZTR割草机自动变割幅结构及控制系统设计冯运发ꎬ王新彦ꎬ田启航ꎬ吕㊀峰ꎬ尹㊀磊ꎬ叶凯强(江苏科技大学机械学院ꎬ江苏镇江㊀212000)摘㊀要:针对零转弯半径(ZTR)割草机割幅宽度固定㊁无法适应复杂的作业环境的问题ꎬ研发了一种可以自动变割幅的割草器ꎬ在1.2m割幅的WBZ12219K-SZTR割草机的基础上ꎬ在主刀盘两侧分别增加一个副刀盘ꎮ副刀盘主要由割刀㊁连接板㊁伺服电动推杆及曲线槽等组成ꎬ通过伺服电动推杆的伸缩ꎬ控制副刀盘的旋转ꎬ以达到变割幅的目的ꎮ工作时ꎬ通过图像识别技术识别出前方障碍物信息ꎬ判断出障碍物间距ꎬ将该间距进行区分做出相应的对策ꎬ并经由串口通信协议传递给PLCꎬ然后控制割幅的变化ꎬ可以实现1.2~1.8m无极自动变割幅ꎮ关键词:割草机ꎻ自动变割幅ꎻ图像识别ꎻ串口通信ꎻPLC中图分类号:S817.11+1ꎻTP391.4㊀㊀㊀㊀㊀文献标识码:A文章编号:1003-188X(2019)05-0097-050㊀引言随着乳品业的迅猛发展及高尔夫球㊁网球㊁足球等运动的兴起ꎬ我国的牧草产业及草坪的需求量正在迅速的发展ꎮ对于这些大型的场所使用的割草机一般以小型汽油机或柴油机为动力系统ꎬ以小型汽油机作为动力的较为普遍ꎮ零转弯半径(ZTR)割草机是一种以汽油机为动力系统的坐骑式割草机ꎬ作业前进速度最高可达11.2km/hꎬ并可以实现原地转向ꎬ工作效率高ꎮ但是ꎬ目前市场上销售的ZTR割草机都是定割幅的ꎬ包括1.2㊁1.5㊁1.8m等ꎬ无法满足不同空间的割草需求[1-2]ꎬ若前方障碍物间距小于割幅宽度ꎬ割草机就无法通过ꎻ反之ꎬ若在较宽阔的草地上作业时ꎬ定割幅又限制了其割草效率ꎮ江苏科技大学的王新彦教授及周浩等人发明的两种变割幅割草器ꎬ一种是在现有1.2m刀盘的结构基础上左右各添加1个副刀盘ꎬ将3种不同尺寸的副刀盘进行组合ꎬ可以实现1.5㊁1.8㊁2.3m3种宽度的割草器ꎬ其缺点是只能组合成3种宽度ꎬ且副刀盘比较笨重ꎬ更换时费时又费力[3]ꎻ另一种是在现有刀盘的前方增加了两个可以伸缩的副刀盘ꎬ并分别由一个液压马达带动刀盘转动ꎬ4个液压缸控制两个刀盘的伸缩ꎬ实现了从1.2~2.3m的无极变割幅[4]ꎬ但液压系统复杂且笨重ꎬ在剧烈的震动下容易出现漏油等状况ꎮ常收稿日期:2017-11-30基金项目:国家自然科学基金项目(51275223)作者简介:冯运发(1988-)ꎬ男ꎬ河南商丘人ꎬ硕士研究生ꎬ(E-mail)fengyunfa001@163.comꎮ通讯作者:王新彦(1962-)ꎬ女ꎬ河北保定人ꎬ教授ꎬ博士ꎬ(E-mail)xinyanwang1@163.comꎮ州市福美好机械有限公司发明了一种拖拉机后挂式可伸缩割草机[4]ꎬ通过输入轴㊁齿轮箱将动力从拖拉机传递给割草器ꎬ并由两个油缸控制割幅的变化ꎬ实现了割幅的变化ꎻ但是ꎬ由于结构设计不够合理ꎬ当割幅变至最大时ꎬ中间会出现漏割的现象ꎮ针对上述问题ꎬ笔者设计了一种全自动无极变割幅割草器ꎬ由锂电池为动力源ꎬ在原1.2m刀盘的两端分别增加两个可以前后旋转的副刀盘ꎮ工作时ꎬCCD相机实时采集障碍物信息ꎬ由图像识别算法判断前方障碍物信息ꎬ然后传输给PLC控制割草机割幅宽度ꎬ从而实现了从1.2~1.8m的无极自动变割幅ꎮ1㊀自动变割幅割草器结构设计ZRT割草机这种较大型的割草机在较宽阔的草地上作业时ꎬ宽割幅能提高其工作效率ꎻ但是ꎬ如果在空间狭窄ꎬ或者树木㊁景观石等障碍物间的距离较小时ꎬ割草机就无法通过ꎬ出现漏割的情况ꎬ事后还要由人工采用其他形式的割草机彻底完成割草作业ꎬ费时又费力ꎮ此时ꎬ如果割草机可以自动改变割草机的割幅宽度ꎬ将明显提高ZRT割草机的工作效率ꎮ本文以扬州维邦园林机械有限公司生产的WBZ12219K-SZRT割草机为原始研究对象ꎬ对其割草器进行重新设计ꎬ如图1所示ꎮ1.1㊀割草器总体结构设计自动变割幅割草器的结构示意图如图2所示ꎮ该割草器在原有的1.2m主刀盘的基础上在两侧分别增加了一个外径350mm的副刀盘ꎬ以实现从1.2~1.8m无极变割幅的目的ꎮ左右两个副刀盘通过连接板㊁支撑滑轮及电动推杆与主刀盘相连ꎬ通过电动推杆的伸2019年5月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第5期缩控制副刀盘的前后旋转以实现变割幅ꎬ电动推杆的一端铰接于焊接在主刀盘上的支持板上ꎬ另一端固定在副刀盘的盖板上ꎻ副刀盘上的刀片转动主要靠双层带轮轴经由三角皮带带动ꎻ在两个副刀盘转动的极限位置上ꎬ即1.2㊁1.8m的位置均安装有磁性开关ꎬ以防止发生转动过量ꎬ发生碰撞的情况ꎮ1.割草器㊀2.车架图1㊀原割草机结构示意图Fig.1㊀Wholestructureoforiginalmower1.右副刀盘㊀2.主刀盘㊀3.车架㊀4.左副刀盘图2㊀自动变割幅割草机结构示意图Fig.2㊀Structurediagramofautomaticchangingswathmower1.2㊀主要技术参数自动变割幅割草机主要技术参数:割幅/m:1.2~1.8割刀转速/r min-1:3600割刀数量:5片(主割刀3个ꎬ副割刀2个)配套动力/kW:13.97驱动速度/km h-1:前进最大值11.2ꎬ后退最大值6.4主割刀长度/mm:406.4(16英寸)副割刀长度/mm:330切割方式:旋刀式1.3㊀副刀盘结构设计副刀盘的结构设计最主要的是如何实现其自动旋转ꎬ具体结构如图3和图4所示ꎮ1.内卡簧㊀2.平键㊀3.法兰轴承座㊀4.副刀盘割刀㊀5.双层带轮轴6.外卡簧㊀7.支撑滚轮㊀8.滚轮固定板㊀9.主刀盘割刀10.深沟球轴承6205-2Z㊀11.法兰轴承座㊀12.副刀盘割刀轴13.深沟球轴承6204-2Z㊀14.平键图3㊀副刀盘内部结构图Fig.3㊀Internalstructureofauxiliarycutter1.双层带轮㊀2.连接板㊀3.三角带㊀4.磁性开关㊀5.曲线槽6.副刀盘外壳㊀7.副刀盘带轮㊀8.张紧轮9.伺服电动推杆㊀10.推杆固定板图4㊀副刀盘旋转结构装配图Fig.4㊀Assemblydrawingofrotatingstructureofauxiliarycutter副刀盘内部结构图中ꎬ包括与主刀盘的连接结构及传动结构ꎮ副刀盘主要由连接板㊁支撑滚轮支撑固定ꎬ利用电动推杆的伸缩控制副刀盘在曲线槽上旋2019年5月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第5期转ꎬ以达到改变割幅的目的ꎮ电动推杆由伺服电机带动ꎬ可以实现在任意位置停止ꎬ在副刀盘旋转的极限位置上分别安装了两个磁性开关ꎬ以防止旋转越位ꎬ发生碰撞事件ꎮ1.4㊀割刀及副刀盘运动分析1.4.1㊀割刀运动分析割刀长度有两种ꎬ但其结构都相同ꎬ在割草的过程中割刀高速旋转ꎬ由刀片的刃部割断草ꎮ割刀的运动由自旋转和割草机的运动组成ꎬ割刀上随意一点相对地面的轨迹是余摆线[5]ꎬ如图5所示ꎮ割刀上任意一点的运动轨迹可以使用方程进行表示ꎬ即Xa=rcosωtYa=V+rsinωt{(1)式中㊀r 割刀半径(m)ꎻ㊀t 旋转时间(min)ꎻ㊀ω 割刀旋转角速度(rad/s)ꎻ㊀V 割草机前进速度(m/s)ꎮ图5㊀割刀运动轨迹Fig.5㊀Themotiontrajectoryofblade1.4.2㊀副刀盘运动分析副刀盘的运动是由电动推杆的伸缩控制的ꎬ割幅调整示意图如图6所示ꎮ其中ꎬO1㊁O2位置分别为副刀盘的两个极限位置ꎬ在O1处是整个割草器割幅为1.8mꎬ在O2位置时割幅为1.2mꎮ为了防止漏割现象ꎬ主刀盘割刀轨迹重叠20mmꎬ副刀盘在O1位置与主刀盘割刀轨迹重叠20mmꎮ伺服电动推杆的伸缩速度V=40mm/sꎬ从O1位置到O2位置长度变化ΔL为126.5mmꎬ可求得所需伸缩时间为t=ΔL/V=3.16sꎮ测得θ=52.5ʎꎬ所以可以求得副刀盘旋转平均角速度为ω=θ/180ʎ/t=0.09rad/s(2)式中㊀V 伺服电动推杆速度(mm/s)ꎻ㊀ω 副刀盘旋转平均角速度(rad/s)ꎻ㊀θ 副刀盘旋转的最大角度ꎮ1.主刀盘㊀2.伺服电动推杆㊀3.副刀盘图6㊀割幅调整示意图Fig.6㊀Thediagramofchangingswath2㊀控制系统设计自动变割幅割草机的核心部分也是其难点是控制系统的设计ꎬ主要分为两个部分:一是视觉算法的实现部分ꎻ二是驱动控制部分ꎬ即PLC程序及与上位机的串口通信ꎮ2.1㊀控制系统硬件平台搭建系统的组成包括供电模块㊁CCD采集模块㊁中央处理单元(PC)㊁控制模块(PLC)及电动推杆旋转系统等ꎬ如图7所示ꎮ图7㊀控制系统硬件构成Fig.7㊀HardwarecompositionofcontrolsystemPC机与PLC通过串口通信协议进行实时信息交换ꎬCCD视觉传感器采集割草机前方障碍物情况ꎬ将采集的信息传递给PC进行算法计算判定ꎬ决策割幅是否变化ꎬ然后再将决策信息传递给PLCꎬPLC可以控制报警系统或者控制伺服电机驱动副刀盘进行旋2019年5月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第5期转ꎮ2.2㊀视觉算法建立该算法的实现平台是专业图像处理库软件HAL ̄CONꎬ在此软件上进行算法的编写ꎬ然后与C#语言进行联合编程ꎬ具体算法流程如图8所示ꎮ图8㊀图像算法流程图Fig.8㊀Flowchartofimagealgorithm使用CCD摄像机拍摄前方图像ꎬ经过对图像的预处理㊁图像分割等技术ꎬ提取出障碍物区域ꎬ并通过算法计算出两障碍物(树木)的间距ꎮ然后ꎬ对所提取的两树木的间距进行区分ꎬ分为以下3种情况:①LAB>1.8mꎻ②1.2m<LABɤ1.8mꎻ③LABɤ1.2mꎬ如图9所示ꎮ根据上述3种障碍物间距情况ꎬ制定不同的对策ꎬ经过算法处理ꎬ决策是哪一种情况并将处理结果经PLC控制旋转系统驱动伺服电动推杆伸缩ꎬ同时控制警示灯做出警示ꎮ如遇到第②种情况时ꎬ要先计算出割幅与两树之间的差值Δeꎬ而Δe=1.8-LABꎻ然后ꎬ确定伸缩量ΔLꎬ且ΔL=Δeʃ100mm(100mm可根据驾驶员水平进行调整)ꎮ这里需要将图像识别系统与PLC㊁旋转系统进行联通ꎬ实现自动控制ꎮ2.3㊀PC机与PLC通信所采用的PLC为三菱FX系列ꎬ其程序开发平台是GXDeveloperꎬ在此平台上进行程序的编写后传输到三菱PLC上ꎻ然后ꎬ采用串口通信协议与PC机进行通信ꎬPC机与PLC串口通信所使用编程电缆为SC-09ꎬ而笔记本需要另外添加USB-RS232转换接口才可以通信ꎮ上位机通信程序的编写可以使用高级语言有C++㊁VB及LABVIEWꎮ因为C#汲取了C和C++的优点并去其复杂性ꎬ开发学习相对简单ꎬ所以本文采用编程语言C#ꎮ开发平台为VisualStudio2012ꎬ所采用的控件是SerialPortꎬ通过通信协议设置相关参数即可通过串口连接上PLC[6-7]ꎮ图9㊀割草机工作示意图Fig.9㊀Mowerworkingdiagram2.3.1㊀串口通信参数设置串口通信是利用ASCII码字符进行信息的传输ꎬ可以很好地使上位机(PC)与下位机(PLC)进行命令与数据的发送与接收ꎮ比较常用的通信参数是通信端口㊁波特率(a)㊁数据位(c)㊁停止位(d)和校验位(b)ꎬ可以通过串口调试助手进行调试ꎬ如图10所示ꎮ图10㊀串口调试助手Fig.10㊀Serialdebuggingassistant在参数的设置时ꎬ要保证各参数与PLC内部设置参数一致ꎬ否则无法进行联通ꎮ如串口助手上参数设置为串口为COM1ꎬ波特率为9600ꎬ数据位为8ꎬ停止位为1ꎬ无校验位ꎬ则PLC通信端口也要设置为相同的2019年5月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第5期参数[8]ꎮ2.3.2㊀通信代码设计㊀PC与PLC之间实现串口通信的相关代码如下:㊀privatevoidOpenSerialPort()㊀㊀{㊀㊀㊀serialPort.PortName="COM4"ꎻ㊀㊀㊀serialPort.BaudRate=9600ꎻ㊀㊀㊀serialPort.DataBits=8ꎻ㊀serialPort.Parity=㊀System.IO.Ports.Parity.Noneꎻ㊀serialPort.StopBits=㊀System.IO.Ports.StopBits.Oneꎻ㊀boolFlag=㊀SerialCommunicationObject.OpenCom㊀(refserialPort)ꎻ㊀㊀if(Flag)㊀㊀{㊀㊀㊀this.SerialState_label.Text="打开串口成㊀㊀功"ꎻ㊀㊀}㊀㊀else㊀㊀{㊀㊀this.SerialState_label.Text="打开串口失败"ꎻ㊀㊀}㊀㊀}上述程序中首先将串口打开ꎬ然后设置串口参数包括串口号㊁波特率㊁数据位㊁停止位及奇偶校验ꎬ并在窗口文本框中显示串口打开是否成功ꎮ3㊀试验与分析为了验证本文中设计的自动变割幅割草机的性能ꎬ在学校的绿化草坪区进行了试验ꎬ分两种情况共进行20次试验ꎮ其中ꎬ晴天10次ꎬ阴天10次ꎬ树木间距范围为1.1~2.3mꎬ试验结果如表1所示ꎮ表1㊀自动变割幅割草机试验结果Table1㊀Experimentalresultsofautomaticchangingswathmower环境图像数量树距误差/mm相对误差率/%漏割率/%晴天103.50.221.15阴天104.20.261.22总平均值_3.850.241.19㊀㊀从表1中看出:该割草机工作性能良好ꎬ实际测量距离与软件测量结果平均误差为3.85mmꎬ误差值与实际距离的比值即为相对误差率ꎬ平均值为0.24%ꎬ割草机变割幅后的单位区域内漏割率为1.19%ꎮ实际测量软件界面如图11所示ꎮ图11㊀测量软件界面图Fig.11㊀Interfacediagramofmeasurementsoftware4㊀结论1)提出了ZTR割草机旋转式自动变割幅割草器的设计思想ꎬ使用方便快捷ꎬ可以满足不同环境空间的要求ꎬ降低了工人的劳动强度并提高了割草效率ꎮ2)利用图像识别技术尤其是HALCON机器视觉软件进行算法的编写ꎬ开发速度快㊁识别精度高ꎬ能够实现图像的实时采集及处理ꎬ避免了因人工误判障碍物间距出现漏割或碰撞的情况ꎮ3)运用VisualStudio2012的SerialPort控件实现了PC机与三菱PLC的串口通信ꎬ可以保证通信的准确性和实时性ꎬ同时在编写的软件中验证了它的稳定性和可靠性ꎮ参考文献:[1]㊀王华坤.LY1202.5-2001草坪割草机安全要求[S].北京:中国标准出版社ꎬ2001:4-6.[2]㊀段天青.双圆盘割草机的研制[D].兰州:甘肃农业大学ꎬ2007.[3]㊀王新彦ꎬ周浩.一种液控变割幅坐骑式割草机:中国ꎬ104521419[P].2016-06-29.[4]㊀祝福如ꎬ张志荣.一种可伸缩割草机:中国ꎬ201620857372.0[P].2016-08-10.[5]㊀王鹏飞ꎬ刘俊峰ꎬ高迎ꎬ等.随行自走式果园割草机的设计与试验研究[J].农机化研究ꎬ2016ꎬ38(9):99-103. [6]㊀翟希述ꎬ王宝兴ꎬ范淼.基于VisualC#的串口通信程序设计[J].电子科技ꎬ2011ꎬ24(2):24-26.(下转第106页)2019年5月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第5期[6]㊀牛世伟ꎬ安景文ꎬ刘慧屿ꎬ等.大垄双行疏密种植对玉米冠层结构及产量影响的研究[J].玉米科学ꎬ2014ꎬ22(5):98-103.[7]㊀武志海ꎬ王晓慧ꎬ陈展宇ꎬ等.玉米大垄双行种植群体冠层结构及其微环境特性的研究[J].吉林农业大学学报ꎬ2005ꎬ27(4):355-359.[8]㊀张军昌ꎬ闫小丽ꎬ薛少平ꎬ等.秸秆粉碎覆盖玉米免耕施肥播种机设计[J].农业机械学报ꎬ2012ꎬ43(12):51-55.TheDesignoftheIntegratedFertilizerApplicationforSeedingSongLihuiꎬGongHuanchun(YanchingInstituteofTechnologyꎬLangfang065201ꎬChina)Abstract:Theagriculturaljointoperationtechnologyistheagriculturaloperationtechnologywhichcanberealizedonasetofmachinetoolsintheagriculturalproduction.Agriculturaljointoperationtechnologyisamodernagriculturalproduc ̄tiontechnologyꎬawayofmodernagriculturedevelopmentꎬandanimportantwaytorealizeresourcewasteandreducecosts.Thejointoperatingequipmenthasmanyadvantagesꎬsuchashighefficiencyꎬlowoperatingcostꎬhighutilizationofagriculturalmachineryandenergysaving.CombinedmachineusedinChinaatpresentismainlyaimedatChina'sarabledrylandfarmingofnorthernChinaꎬthesouthforlessmodelsꎬthispaperpresentsthedesignofcombinedmachinerotarystubbleseedingꎬsowingforwheatandrapefertilizer.Keywords:jointoperatingmachineꎻrotarytillagefertilizationꎻdictchingꎻsowing(上接第101页)[7]㊀KarliWatsonꎬJacobVibeHammerꎬJonDReidꎬ等.C#入门经典[M].6版.北京:清华大学出版社ꎬ2015.[8]㊀雷钧ꎬ罗敏ꎬ吴岳敏.基于三菱FXPLC的感应淬火机床与PC机的串行通信实现[J].制造技术与机床ꎬ2017(9):47-50.AbstractID:1003-188X(2019)05-0097-EADesignofAutomaticChangingSwathStructureandControlSystemforZTRMowerFengYunfaꎬWangXinyanꎬTianQihangꎬLvFengꎬYinLeiꎬYeKaiqiang(CollegeofMechanicalꎬJiangsuUniversityofScienceandTechnologyꎬZhenjiang212000ꎬChina)Abstract:Aimingatthezeroturningradius(ZTR)mowercuttingwidthfixedꎬunabletoadapttothecomplexworkingenvironmentꎬdevelopedamowercanautomaticallychangeswath.OnthebasisoftheWBZ12219K-SZTRmowerof1.2mswathꎬaddanauxiliarycutteronbothsidesofthemaincutter.Themechanicalstructureoftheauxiliarycutterismain ̄lycomposedofbladeꎬconnectingplateꎬservoelectricpushrodꎬcurvegrooveandsoon.Therotationoftheauxiliarycutteriscontrolledbythestretchingoftheservoelectricpushrodꎬsoastoachievethepurposeofchangingtheswath.TheobstacleinformationisidentifiedbyimagerecognitiontechnologyꎬthedistancebetweenobstaclesisjudgedꎬitistobedistinguishedandtomakecorrespondingcountermeasuresꎬthentransmittoPLCthroughtheserialportcommunicationprotocolꎬfinallycontrolthechangesofcuttingwidthꎬcanrealizesteplessautomaticchangingswathfrom1.2mto1.8m.Keywords:mowerꎻautomaticchangingswathꎻimagerecognitionꎻserialcommunicationꎻPLC2019年5月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第5期。
天嵌Cortex-A8S5PV210嵌入式开发板

天嵌Cortex-A8S5PV210嵌入式开发板TQ210v6使用 Samsung Cortex-A8 S5PV210 芯片, CPU采用45nm 工艺制程,运行最大频率可达 1GHz,处理器内部为 64/32 位总线结构,32/32KB一级缓存,512KB 二级缓存。
自带 3D 图形加速引擎(SGX540),2D 图形加速,最大支持8192*8192 分辨率。
视频编码支持MPEG-4/H.263/H.264 达到1080p@30fps ,解码MPEG2/VC1/Xvid 视频达到 1080p@30fps ;支持高清 HDMI TV 输出。
TQ210核心板配置:名称配置级别价格备注TQ210 CoreB 核心板1GHz主频 1GB DDR21GB Flash商业级350元标配适用于TQ210v3/v4TQ210 CoreD 核心板1GHz主频 512MB DDR2 512MB Flash商业级310元标配适用于TQ210v6CPUSamsung S5PV210 Cortex A8主频1GHz内存512MB,DDR2 128Mx4pcs核心板尺寸80x52x9mm核心板层数8 层板沉金工艺、布局、布线充分考虑EMC、EMI核心板引脚数200pin,采用SMD 式插针接口Nandflash512MB,SLC(S34ML04G100TF100)(4GB eMMC可选)电源管理分立电源供电核心板功率1.5W (5V-300mA)底板尺寸183x131x20mm(不含接口超出板外框部分)底板层数2 层输入电压12 伏电源输入带5寸电容屏待机功耗3.6W带5寸电容屏最大功耗4.8WIO 口最大输入电压值3.3V(禁止超过3.3V 电压输入 IO 口)Usb OTG1 路 USB_OTG 2.0 下载调试接口Usb Host3 路USB_HOST 2.0 接口功放输出支持左右声道各 1W 输出功率(8 欧负载)HDMIHDMI v1.3,1080p@30fps 高清数字输出AudioMIC、PHONE、集成功放接口,板载驻极体话筒Ethernet10/100MDM9000CEPCOM(232、485、TTL)2 路 5 线 RS232, 4 路 TTL (两路复用), 1 路 RS485 (复用)Keypad6x6 矩阵键盘RTC 备用电池1 个SD 卡座1 个WIFI支持 SDIO WIFI,USB WIFI(可选配)Beep(Buzzer)1 路 PWM 控制的蜂鸣器GPS 模块支持串口通信的 GPS 模块3G 模块支持配套的USB-3G 模块(可选配)miniPCI-E 模块支持 USB 通信的标准 miniPCI-E 模块 MF210ADC1 路电位器模拟 ADC 输入PWM3 路,1 路用到蜂鸣器,2 路用到显示屏SPI2 路 SPI 接口,可选配加速度传感器模块I2C3 路I2CEEPROM板载EEPROM 芯片AT24C02JTAG10pin(2x5,2.0 间距,预留在核心板上)RST 复位1 个复位按键Camera2 路,支持 CMOS、AV 摄像头(流媒体格式)双CMOS 摄像头模块接口,可一键切换,支持自动识别(部分系统)AV in可用 AV 转接板外接于 CAMERA 接口User Led2 个用户按键8 个红外 IrDA1 路,支持红外遥控(遥控器可选配)温度传感器1 个,温度传感器采集功能LCD 类型选择底板支持电容屏/电阻屏自由切换,可接VGA 模块,跳线在LCD 接口右边启动拨码选择支持NAND/EMMC/SD 卡/USB 多种启动方式。
毕业设计 基于单片机的智能仓库控制系统设计 .docx
摘要摘要本论文的设计题目是基于单片机的智能仓库控制系统设计。
本次设计以PC 机作为上位机监控单元,以AT89C52单片机作为下位机控制器,设计智能仓库的温湿度控制系统。
包括硬件设计和软件设计两部分。
硬件部分包括AT89C52 单片机、温湿度检测模块、温湿度输出控制模块、键盘输入模块、LCD显示模块、通信模块、报警模块及电源模块等。
软件部分包括画出主程序及各子程序流程图,并编程实现。
本系统通过键盘设定模块进行系统给定值的设置来调整仓库温湿度控制范围。
温、湿度检测模块将仓库内的温、湿度信息传到单片机,单片机根据实际情况输出控制信号驱动控制模块进行相应操作,同时将当前信息进行存储并上传数据到上位机显示及保存。
当温、湿度超过设定范围的上下限时,控制器将会启动或者停止相应设备来调整环境湿度和温度,同时将各种调整信息在LCD 上显示并发出报警信号L厶.ill | . 够本文设计的智能仓库控制系统实现了对温湿度的实时检测与控制,降低了人工劳动强度。
关键词:智能仓库,AT89C52, SHT11,液晶显示IAbstractAbstractThe subject of this thesis is microcontroller-based intelligent warehouse control system design・ The design uses PC as a monitor unit and AT89C51 microcontroller as the next bit machine controller to design intelligent temperature and humidity control system, including hardware and software design. The hardware part includes AT89S51 microcontroller, the detection module for temperature and humidity, tenperature and humidity output control module, the keyboard input module, LCD display module, communication module and alarm module・Software part includes draw the main program and the procedure flow chart, and the programming・The system through the keyboard settings module system for a given value of the settings to adjust the storage tenperature and humidity control range. Temperature and humidity detection module spreads temperature and humidity inside the warehouse to microcontroller, microcontroller based on the actual situation of the output control signal drive control module operating at the same time to store and upload data to the host conputer to display and save the current information. When the tenperature and humidity exceeds the set range of the upper and lower limit, the controller will start or stop the corresponding device to adjust the ambient humidity and temperature, while a variety of adjustment information on the LCD display and an alarm signal.In this paper, the design of intelligent warehouse control system to achieve real-time detection and control of temperature and humidity, and reduce labor intensity. Keywords: Intelligent warehouse, AT89C52, SHT11, LCD目录摘要 (I)ABSTRACT ...................................................................................................................... I I 目录................................................................ I IIII目录III第一章引言 (1)1.1课题背景 (1)1.2仓库温、湿度控制技术的国内外研究状况 (1)1.2.1硬件技术 (1)1.2.2软件技术 (3)1.3课题设计目标 (3)第二章系统总体方案设计 (4)2.1系统功能、组成及工作原理 (4)2」.1总体方案 (4)'2.1.2实施措施 (4)2.2温湿度传感器的方案论证和选择 (5)2.2.1数字式温度传感器的类型 (5)2.2.2数字湿度传感器的类型 ......................................... 7 ▼ Z2.3温湿度传感器的确定••…电.•县••丄.电..^^...县丄.4第三章系统硬件设计 (9)3.1单片机最小系统设计 (9)3.1」AT89C52 简介 (9)3.1.2吋钟电路和复位电路 (9)3.1.3单片机最小系统电路图 (11)3.2 LCD 1602 液晶显示 (12)321 1602 简介 (12)3.2.2 1602与单片机连接图及工作原理 (13)3.3矩阵键盘 (14)3.4温湿度检测 (15)341 SHT11测温湿度的使用方法 (15)3.4.2校验测得的温湿度 (16)3.4.3 SHT11与单片机相连的电路图 (18)3.5报警电路 (18)目录3.6控制屯路 (19)3.7单片机与PC之间的通信 (20)3.8电源电路 (21)3.&1线性直流稳压电源的基本原理 (21)3.8.2电源原理图 (21)第四章系统软件设计 (22)4.1系统初始化程序 (23)4.2按键显示设定的温湿度 (23)4.3温湿度计算(测量、处理)及显示 (23)4.4串口通信 (25)4.5控制程序 (25)总结 (28)参考文献 (29)致谢 (30)附录一总电路图 (31)附录二PCB图 (32)附录三程序 (32)IV第一章引言1第一章引言1.1课题背景在现代工业现场,随着科技的进步和自动化发展,温、湿度监测系统在某 些行业中要求越来越高,特别是在大中烈仓库管理系统中,由于温湿度过高或 过低引起的仓库储藏物本身的水分过高或连续的高湿天气将导致储藏物新陈代 谢加快而放出热量,放热引起的温升又是代谢进一步加剧以至发霉变质,因此 仓库必须重视对空气温湿度精确的而又方便的实时监测,长期以来,由于受经 济条件限制,我国仓库环境较差,而且管理落后。
基于STM32和树莓派的智能除草机器人系统设计
基于STM32和树莓派的智能除草机器人系统设计摘要:针对传统玉米追肥费时费力,效率较低,我们基于STM32和树莓派,设计了用STM32作为主控芯片,树莓派作为视觉控制的系统实现智能除草追肥。
采用STM32单片机、电阻应变式压力传感器、HX711 A/D转换芯片构建了除草机器人的运动控制系统,利用树莓派+opencv实现杂草智能识别。
使用陶晶驰智能串口屏设计了人机接口,通过GPRS模块上传数据。
该系统实现了除草追肥一体化,极大程度提高了玉米追肥的效率。
关键词:除草系统;opencv视觉; STM32;人机交互;GPRS通信;PID算法、ROS路径规划0引言我国施肥机械种类多,但缺少可以精确的控制系统来调节种子与化肥施用比例,只可以人为经验控制肥种量,肥料利用率仍旧较低[1]。
其次因我国规模化玉米种植仍为一种趋势,没有适合大面积推广应用的成熟机具,多数自动化程度较高的大型玉米施肥机需要较高专业技术素养人员操作,对操作人员的要求高,不容易普及,一般只有国营农场才能使用。
本系统的开发,极大程度简化了玉米农场中到的作业操作,为智慧农业系统的建立提供有力的数据支持。
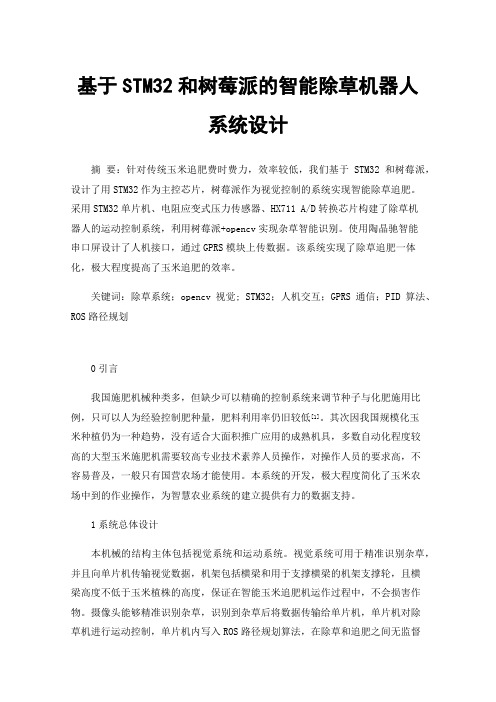
1系统总体设计本机械的结构主体包括视觉系统和运动系统。
视觉系统可用于精准识别杂草,并且向单片机传输视觉数据,机架包括横梁和用于支撑横梁的机架支撑轮,且横梁高度不低于玉米植株的高度,保证在智能玉米追肥机运作过程中,不会损害作物。
摄像头能够精准识别杂草,识别到杂草后将数据传输给单片机,单片机对除草机进行运动控制,单片机内写入ROS路径规划算法,在除草和追肥之间无监督选择最佳路线,实现精准追肥和智能除草。
在机器底部还设有除草机构,除草机构包括除草轮、除草轮支撑架和除草轮驱动装置,除草轮包括轮盘,沿轮盘的周向均布条形除草铲,各除草铲的长度方向与轮盘的轴向平行,节省了除草剂的使用及人工除草的成本。
2系统硬件设计硬件部分主要包括供电模块、STM32主控制器模块、树莓派控制器、GPRS模块、电机驱动模块、人机交互模块。
《基于UWB定位的智能割草机器人设计》
《基于UWB定位的智能割草机器人设计》一、引言随着科技的不断进步,智能割草机器人逐渐成为现代家庭和园林维护的重要工具。
本文将探讨一种基于超宽带(UWB)定位技术的智能割草机器人设计,以提高其工作效率、精确度和安全性。
本文将首先介绍UWB定位技术及其在智能割草机器人中的应用,然后详细描述该机器人的系统设计、关键技术和优化措施。
二、UWB定位技术在智能割草机器人中的应用UWB(Ultra-Wideband)技术是一种无线定位技术,具有高精度、抗干扰能力强、功耗低等优点。
在智能割草机器人中,UWB定位技术主要用于实现机器人的精确导航和自主避障。
通过UWB定位系统,割草机器人能够实时获取自身位置信息,从而规划最优割草路径,并避免与障碍物发生碰撞。
三、系统设计1. 硬件设计智能割草机器人硬件设计主要包括机器人主体、UWB定位模块、电池及充电系统等部分。
机器人主体负责执行割草任务,UWB定位模块用于实现精确导航和避障,电池及充电系统则为机器人提供持续的能源供应。
2. 软件设计软件设计是智能割草机器人的核心部分,主要包括控制系统、路径规划算法、避障算法等。
控制系统负责协调机器人的各项功能,路径规划算法根据UWB定位信息规划最优割草路径,避障算法则使机器人在遇到障碍物时能够自主避障。
四、关键技术1. 精确导航UWB定位技术为智能割草机器人提供了高精度的位置信息,使机器人能够实时获取自身位置,并规划最优割草路径。
通过与地图数据相结合,机器人还能实现室内外环境的无缝切换。
2. 自主避障避障算法是智能割草机器人的重要技术之一。
通过UWB定位信息和环境感知传感器,机器人能够在遇到障碍物时自主避障,避免与障碍物发生碰撞。
此外,机器人还具有自动返回充电站的功能,以确保持续工作。
3. 智能控制智能控制技术使智能割草机器人具备高度自主性。
通过控制系统和路径规划算法的协同作用,机器人能够根据实际情况自动调整割草策略,提高工作效率。
基于单片机的智能抽水灌溉系统设计
基于单片机的智能抽水灌溉系统设计目录1. 内容概要 (2)1.1 研究背景 (3)1.2 研究意义 (4)1.3 国内外研究现状 (5)1.4 研究内容与方法 (6)2. 智能抽水灌溉系统概述 (7)2.1 系统功能与目标 (8)2.2 系统组成 (10)3. 基于单片机的控制系统设计 (10)3.1 硬件设计 (12)3.1.1 单片机选择 (13)3.1.2 电源模块设计 (14)3.1.3 泵电机控制模块 (16)3.1.4 传感器及接口设计 (17)3.2 软件设计 (18)3.2.1 控制策略 (19)3.2.2 实时操作系统应用 (19)3.2.3 用户界面设计 (20)4. 灌溉系统的精准控制策略 (22)4.1 土壤湿度检测与控制 (23)4.2 水位检测与控制 (24)4.3 气候条件分析与控制 (24)4.4 人工神经网络在控制中的应用 (26)5. 系统优化与调试 (27)5.1 系统性能指标 (29)5.2 系统优化方法 (30)5.3 系统调试与测试 (30)6. 系统实施与应用案例 (31)6.1 系统实施流程 (32)6.2 应用案例分析 (34)6.3 系统维护与优化 (35)7. 结论与展望 (36)7.1 研究成果总结 (37)7.2 存在问题与不足 (38)7.3 未来工作展望 (39)1. 内容概要本文档旨在阐述基于单片机技术的智能抽水灌溉系统的设计概念、实现方案及应用前景。
文章将分章节探讨该系统的核心内容和功能:系统概述:介绍系统设计理念、目的及发展方向,强调智能灌溉系统的重要性及其在现代农业中的应用价值。
市场需求与技术背景:分析当前市场对高效、智能灌溉系统的需求,概述相关技术的发展现状,包括传感器、微控制器、通信协议及远程监控技术。
系统架构:详述智能灌溉系统的硬件组成及软件核心模块。
详细介绍单片机的选择、外围电路设计,如水分传感器、土壤墒情传感器、水流量传感器等,以及系统的通信模块实现。
智能播种机器人控制系统设计
智能播种机器人控制系统设计王㊀雷,陈炳羽,朱正凡(甘肃畜牧工程职业技术学院,甘肃武威733006)摘㊀要:为进一步提高作物播种自动化水平和生产效率,该文详细阐述了智能播种机器人硬件系统㊁软件系统的设计,以及关键部件的选型,通过构建智能播种机器人路径规划算法,实现农田环境感知和作物信息处理,达到精准的播种路径规划和种子分配㊂通过田间试验,验证了所设计控制系统的可行性和有效性㊂结果表明,通过划分区域㊁设定优先级和避障策略,实现了高效的播种路径规划㊂关键词:智能播种机器人;控制系统;感知;决策;路径规划中图分类号:TP242;S223.2㊀㊀㊀㊀㊀㊀文献标识码:Adoi :10.14031/ki.njwx.2024.02.003Design of Control System for Intelligent Seeding RobotWANG Lei,CHEN Bingyu,ZHU Zhengfan(Gansu Polytechinc College of Animal Husbandry &Engineering,Wuwei 733006,China)Abstract :In order to further improve the automation level and production efficiency of crop seeding,this paper elabo-rates the design of the hardware system and software system of the intelligent seeding robot,as well as the selection of key components,and realizes the perception of farmland environment and crop information processing by constructing the path planning algorithm of the intelligent seeding robot,so as to achieve accurate seeding path planning and seed distri-bution.Through field experiments,the feasibility and effectiveness of the designed control system are verified.The re-sults show that efficient seeding path planning is achieved by dividing areas,setting priorities and obstacle avoidancestrategies.Key words :intelligent seeding robot;control system;perception ;decision making;path planning基金项目:2023年甘肃省教育科技创新项目(2023A -282);2021年度武威市科技计划项目(ww2101008)作者简介:王雷(1985 ),男,甘肃武威人,本科,高级实验师,研究方向为机械制造自动化㊂0㊀引言智能播种机器人作为现代农业生产的重要设备,为农作物的种植和生产带来了全新的机遇和挑战㊂智能播种机器人是一种基于先进感知㊁定位㊁控制和自主决策技术的自动化农业装备,通过整合多种传感器和算法,准确地在农田中完成播种任务,优化种植布局,提高生产效率[1-3],并在作物生长周期内进行数据记录与分析㊂与传统播种方式相比,智能播种机器人有提高生产效率㊁精确播种㊁减少劳动力成本㊁环保与可持续性㊁数据驱动决策㊁适应多样化需求等优势[4]㊂为进一步完善智能播种机器人的理论基础与系统优化,本文对智能播种机器人硬件及软件组成进行分析,并提出基于优先级的往复式覆盖算法,考虑作物的生长需求㊁土壤特性等因素,通过合理的优先级安排,使机器人能够在农田中以往复式作业的方式覆盖整个种植区域,保证作物的均匀分布,提高播种效率[5]㊂最后通过田间试验,验证该系统的有效性与稳定性㊂研究结果旨在为智能播种机器人的理论发展和系统优化提供实质性指导㊂1㊀智能播种机器人控制系统设计1.1㊀硬件系统设计硬件部分涵盖了机器人的物理组件,在硬件部分中,智能播种机器人基于电源模块,通过主控电路㊁传感器系统(超声波传感器㊁土壤湿度传感器和红外传感器)㊁执行模块组成(图1)㊂1.1.1㊀主控电路主控电路是智能播种机器人的核心,本文选择主控芯片为STM32F407㊂STM32F407是意法半导体推出的一款高性能STM32微控制器,采用ARM Cortex -M4内核,具备丰富的外设接口㊁强大的计算能力和广泛的开发支持,非常适合复杂农田应用场景[6]㊂本文将图像处理㊁路径规划和躲避障碍物等功能融入控制系统,机器人通过分析感知数据和预定算法,做出智能决策㊂控制算法程序如图2所示㊂1.1.2㊀程序下载电路本文选择的STM32F407芯片下载方式主要分为3种[7]㊂1)ST -Link 调试器/编程器㊂ST -Link 是意法半导体提供的一种常用调试和编程工具,使用ST -Link 调试器通过SWD (Serial Wire Debug)接口与STM32F407芯片进行连接,实现程序下载㊁调试和实时监测㊂此方法可以与多种集成开发环境(IDE)如Keil㊁STM32CubeIDE 和TrueSTUDIO 等配合使用㊂2)USB Bootloader㊂STM32F407芯片通常提供内置的USB Bootloader,允许通过USB 接口进行固件更新㊂通过将芯片连接到计算机的USB 接口,使用特定的工具或软件进行程序下载㊂该方法特别图1㊀智能播种机器人硬件系统结构示意图图2㊀主控电路算法程序示例适用于在没有调试器的情况下更新程序㊂3)外部编程器/烧录器㊂除了ST -Link,还有许多第三方编程器和烧录器也支持STM32F407芯片的下载㊂这些工具通常提供更多灵活性和适用性,尤其是在批量生产和量产时,使用外部编程器需要配置相应的软件和硬件,确保与目标芯片之间的正常通信㊂本文采用SWD (Serial Wire Debug )接口与STM32F407芯片进行连接,实现程序下载㊁电路设计,程序下载电路原理如图3所示㊂图3㊀程序下载电路原理图1.1.3㊀超声波传感器模块检测电路超声波传感器不需要与物体直接接触就可以测量出与周围物体的距离[8],本文选取HC -SR04超声波传感器,通过GPIO 引脚与微控制器连接,发送触发信号,然后测量返回脉冲的时间㊂本文超声波传感器安装位置如表1所示,电路原理图如图4所示㊂表1㊀智能播种机器人超声波传感器安装位置传感器位置功能前方避免碰撞㊁规避障碍物,确保前方路径安全后方倒退时避免碰撞,调整位置时避免撞到后方障碍物两侧在狭窄空间中行驶时避免碰撞,确保两侧安全底部在不平整地形上保持稳定高度㊁姿态,适应不同地形播种器部分确保种子适当放置,控制播种深度和密度图4㊀超声波模块电路图设计1.1.4㊀电磁阀控制电路㊀㊀STM32F407通过GPIO 引脚来控制电磁阀的驱动,电路设计原理如图5所示㊂将电磁阀的线圈连接到STM32F407的一个GPIO 引脚,后在STM32F407的软件代码中,配置相应的GPIO 引脚为输出模式㊂最后根据需要,通过控制GPIO 引脚的高低电平,向电磁阀的线圈提供电流,以打开或关闭阀门[9]㊂STM32CubeIDE 和HAL 库的C 代码如下://设置GPIO 引脚HAL_GPIO_WritePin(GPIO_PORT,GPIO_PIN,GPIO_PIN_SET);//打开电磁阀//延迟一段时间,保持电磁阀打开状态HAL_GPIO_WritePin(GPIO_PORT,GPIO_PIN,GPIO_PIN_RESET);//关闭电磁阀㊀㊀1.2㊀软件设计软件部分则负责控制硬件以实现预定的任务和功能㊂智能播种机器人控制系统软件程序主要包括主程序㊁超声波检测子程序和电磁阀控制子程序㊂1.2.1㊀主程序设计主程序是整个智能播种机器人控制系统的核心,负责协调各个子系统的操作,从传感器获取数据并做出决策,控制执行器执行相应动作㊂主程序往往包括任务调度㊁环境感知㊁路径规划㊁决策制定等功能[10]㊂本文主程序工作流程图,如图6所示㊂1.2.2㊀子程序设计1)超声波传感器㊂超声波传感器控制子程序用于获取超声波传感器测量的距离数据,并根据这些数据做出决策,本节以智能播种机器人避开障碍物或调整路径控制程序为例进行分析,子程序如图7所示㊂图5㊀电磁阀控制电路原理图图6㊀主程序流程图㊀㊀2)电磁阀控制㊂电磁阀控制子程序根据系统的需要,控制电磁阀的开关状态,从而实现播种机器人的种子释放㊂在子程序设计中,一般使用 OPEN 和 CLOSE 控制电磁阀的开关状态,如图8所示㊂2㊀智能播种机器人路径规划算法智能播种机器人的路径规划算法旨在确定最佳的播种路径,使机器人能够在农田中高效地播种而不碰撞障碍物㊂本文选择基于优先级的往复式覆盖算法,使智能播种机器人在农田中高效播种,同时避开障碍物㊂基于优先级的往复式覆盖算法,给农田划分成不同的区域,并为每个区域分配优先级,实现机器人的路径规划,其核心思想为机器人首先沿着高优先级区域进行播种,然后按相反方向往复地覆盖低优先级区域,确保农田得到完整的覆盖[11-12]㊂主要工作流程如下:1)农田划分㊂将农田分成一定数量的小区域,图7㊀超声波传感器控制子程序图8㊀电磁阀控制子程序示例每个小区域都对应一个播种任务㊂2)优先级分配㊂为每个小区域分配一个优先级,通常可以基于播种需求㊁土壤条件㊁作物类型等因素来确定优先级㊂3)往复式覆盖㊂机器人从最高优先级的区域开始,沿着预定的路径进行播种㊂完成一条路径后,机器人返回起始点,然后按相反方向在低优先级区域上进行往复式覆盖㊂4)避障处理㊂在往复覆盖过程中,机器人需要通过传感器检测障碍物㊂如果检测到障碍物,机器人会采取相应的行动,如绕开障碍物或暂时停止㊂5)路径优化㊂在往复式覆盖的过程中,可以使用路径规划算法,优化机器人的轨迹,以减少路径长度和时间㊂3㊀田间试验本文基于智能播种机器人硬件系统,结合优先级的往复式覆盖算法,对该系统在田间路径规划效果㊁播种精度及播种效率进行试验与分析㊂选取遗传算法及粒子群算法为对照,以本研究提出的基于优先级的往复式覆盖算法为参考,开展系统测试,智能播种机器人田间路径规划结果如表2所示㊂结果表明,粒子群算法表现出较好的路径规划效果,所有区域几乎都被覆盖,播种精度也较高,有时会遇到障碍物未能完全避开,导致播种路径中断,部分种子可能偏离目标位置㊂基于优先级的往复式覆盖算法能够更好地根据不同区域的优先级进行播种,时间效率较高,但稍慢于粒子群算法㊂4㊀结论本文对智能播种机器人控制系统的技术方案进行了全面讨论和研究,如控制系统设计和路径规划算法优化㊂主要研究结果如下㊂1)本文选择了高性能的STM32F407主控芯片作为核心,通过GPIO引脚控制电磁阀来实现种子释放㊂超声波传感器模块被设置在不同位置,用于测量与周围物体的距离,从而实现顺利避障㊂表2㊀不同算法下田间路径规划结果场景路径规划算法覆盖效果避障表现时间效率播种精度1粒子群算法较好,几乎所有区域都被覆盖有时遇到障碍物未能完全避开高效,完成任务时间较短较准确,部分种子偏离目标位置2基于优先级的往复式覆盖算法优先级高区域被首先覆盖有效地避开障碍物较高效,稍慢于粒子群算法准确,种子基本在目标位置3遗传算法整体覆盖效果不错,但可能出现间隙随机性较大,有时避障不够灵活较慢,算法迭代时间较长相对准确,但存在一些偏差㊀㊀2)在软件程序设计中,主程序作为核心,协调各子系统进行任务调度㊁环境感知㊁路径规划和决策制定,实现机器人的运动和播种操作㊂3)基于优先级的往复式覆盖算法作为路径规划策略,通过划分区域㊁设定优先级和避障策略,实现了高效的播种路径规划㊂田间试验结果分析验证了该算法的有效性,不同算法在不同场景下的表现也得到了比较和评估㊂参考文献:[1]㊀潘超然.玉米精量播种机播种质量监测与调控系统设计[J].农机使用与维修,2023(1):38-40.[2]㊀王宝梁.多功能自主农业机器人研制[D].南京:南京农业大学,2013.[3]㊀候玉强,李俊伟,徐洛川,等.智能播种监测装置的研究进展[J].新疆农机化,2023(3):21-23+41. [4]㊀夏兴宇.马铃薯精量播种智能测控系统研究[D].合肥:中国科学技术大学,2022.[5]㊀吴亮,吴燕,鄢强,等.施肥机器人结构及控制系统设计[J].广西农业机械化,2020(3):29-31.[6]㊀Yakoubi M A,Laskri M T.The path planning of cleanerrobot for coverage region using genetic algorithms[J].Journal of innovation in digital ecosystems,2016,3(1):37-43.[7]㊀曹世佳.基于图像识别的种植机器人的研究与应用[D].石家庄:河北科技大学,2019.[8]㊀聂杨.智能割草机器人的关键技术研究[D].重庆:重庆大学,2018.[9]㊀董文浩.基于嵌入式系统的机器视觉杂交稻智能恒量播种装置研究[D].广州:华南农业大学,2020. [10]Dusadeerungsikul P O,Nof S Y.A collaborative controlprotocol for agricultural robot routing with online adapta-tion[J].Computers&Industrial Engineering,2019,135:456-466.[11]康海艳.玉米生产中的精量播种作业及精确控制技术研究[J].农机使用与维修,2021(1):117-118. [12]李国辉.农业机器人避障路径智能规划研究[J].农机化研究,2021,43(3):236-239.(02)。
基于PLC和物联网的蔬菜切割机

基于PLC和物联网的蔬菜切割机【摘要】本文针对蔬菜切割机领域进行研究,利用PLC和物联网技术相结合,设计出一种智能化的蔬菜切割机。
引言部分介绍了研究的背景、意义和目的,正文部分则分别介绍了蔬菜切割技术概述、基于PLC的蔬菜切割机设计、基于物联网的蔬菜切割机优势、应用案例分析以及安全性和效率性分析。
结论部分总结了基于PLC和物联网的蔬菜切割机未来发展趋势,并展望未来的发展方向。
通过本文的研究,为蔬菜切割机的智能化发展提供了新的思路和技术支持,有望推动蔬菜加工行业向更高效、更安全的方向发展。
【关键词】蔬菜切割机, PLC, 物联网, 设计, 优势, 应用案例, 安全性, 效率性, 发展趋势, 结论, 展望未来.1. 引言1.1 背景介绍蔬菜在人类日常生活中扮演着重要的角色,是我们饮食中必不可少的一部分。
随着人们对健康饮食的需求逐渐增加,蔬菜的消费量也在不断增加。
传统的蔬菜切割方式存在着效率低、安全性差等问题,需要通过技术手段进行改进。
基于PLC和物联网的蔬菜切割机应运而生,为蔬菜切割领域带来了革命性的变革。
随着科技的不断发展,PLC技术已经在工业控制领域得到了广泛应用,其稳定性和高效性使其成为自动化设备控制的重要工具。
物联网技术则将各种设备通过互联网络进行连接,实现设备间的信息共享和协同工作。
将PLC和物联网技术应用于蔬菜切割机中,不仅可以提高切割机的自动化程度和精准度,还可以实现远程监控和操作,大大提升了生产效率和安全性。
本文将对基于PLC和物联网的蔬菜切割机进行深入研究与探讨,旨在为蔬菜加工行业提供一种高效、安全的切割解决方案,同时推动这一领域的技术发展与创新。
1.2 研究意义蔬菜切割机是餐饮行业中常见的设备,它能够大大提高厨房的工作效率和生产能力。
而基于PLC和物联网技术的蔬菜切割机则能够进一步提升设备的智能化程度,实现更高效的生产和管理。
研究意义在于,基于PLC和物联网的蔬菜切割机将成为未来餐饮行业中不可或缺的重要设备。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于三星S5PV210的智能割草机控制系统设计宣 峰ꎬ韩孟洋(河南工业职业技术学院ꎬ河南南阳 473000)摘 要:为了满足割草机全自动的作业需求ꎬ提出了一种基于三星S5PV210的智能割草机控制系统ꎮ该系统融合了机械设计、环境感知、智能控制、路径动态规划和行为决策等技术ꎬ能够自主地对目标草坪进行作业ꎮ试验结果表明:该智能收割机能够实现整个目标草坪的割草作业ꎬ且路径规划路线最优ꎬ割草机成功避开了障碍物ꎬ在整个过程没有发生碰撞行为ꎬ具有高实时性和高可靠性ꎬ应用前景广阔ꎮ关键词:智能割草机ꎻ路径规划ꎻ环境感知ꎻS5PV210中图分类号:S817.11+1ꎻTM571 文献标识码:A文章编号:1003-188X(2019)06-0228-05
0 引言随着经济的快速发展和城市绿化建设的深化ꎬ各个城市草坪面积越来越大ꎬ而修剪和维护草坪是一项繁重且枯燥的工作ꎬ往往需要投入大量的人力、物力和财力ꎮ在智能制造2025的大背景下ꎬ为了最大限度地减少维护草坪工作的劳动力成本ꎬ我国提出了结合智能控制和先进电子技术研制开发智能型割草机的发展战略ꎬ研究出一种适合大型场地的智能割草机ꎬ实现大型场地草坪维护工作的变革和创新ꎬ将为用户创造巨大的经济和社会价值ꎮ为此ꎬ本文以三星S5PV210微处理器为控制核心ꎬ设计和研发了一款智能割草机ꎬ能够自动识别草坪和路径规划ꎬ对于草坪维护工作具有重要意义ꎮ1 智能割草机整体架构的设计智能割草机是一个融合机械设计、环境感知、智能控制、路径动态规划和行为决策综合性系统ꎮ本章以割草机本体结构、控制系统结构及数据管理模块为切入点进行讨论分析ꎬ以确保智能割草机最终设计方案的合理性ꎮ1.1 智能割草机本体结构的设计智能割草机本体结构包括电源、割草、控制和驱动4个模块ꎬ如图1所示ꎮ电源模块包括锂电池、PWM电流控制器及电源控制电路等ꎬ主要是实现对收稿日期:2018-02-12基金项目:河南省高等学校重点科研计划项目(18B460010)作者简介:宣 峰(1981-)ꎬ男ꎬ河南南阳人ꎬ讲师ꎬ硕士ꎮ通讯作者:韩孟洋(1989-)ꎬ男ꎬ河南南阳人ꎬ助教ꎬ(E-mail)357861778@qq.comꎮ割草机的锂电池进行合理充放电管理ꎻ割草模块包括直流电机、割刀和高度调整器等ꎬ负责割刀的驱动及割刀高度的调整ꎻ驱动模块包括机械传动装置、驱动电机和驱动轮3部分ꎬ负责割草机的前行、后退和转向ꎻ控制模块包括S5PV210处理器和传感器检测两部分ꎬ负责整个系统的控制及传感信号的采集与处理ꎮ
图1 智能割草机的本体结构框架Fig.1 Thestructureframeoftheintelligentlawnmower
1.2 智能割草机控制系统结构的设计
智能割草机具有一定的人工智能水平ꎬ能通过多传感器组对作业区域环境进行实时感知ꎬ并根据感知的结果对自身的行为规划进行实时指导ꎮ智能割草机控制系统包括超声波障碍物检测、位置定位、电子罗盘和驱动控制等子系统ꎬ如图2所示ꎮ微控制器将超声波传感器、位置接受传感器及电子罗盘等信息进行融合计算ꎬ可以得到割草机的实时坐标及障碍物的位置信息ꎻ另外ꎬ处理器还可以将其坐标与数据库中割草机已经走过的路径坐标进行比较ꎬ判断其是是否已经经过该区域ꎬ进一步规划割草机的运动路径ꎮ运动控制模块获得传送过来的运动策略ꎬ给电机驱动模块发送指令ꎬ进而采用差分方式驱动左右电机的运行ꎬ达到运动目的ꎮ822
2019年6月 农机化研究 第6期图2 智能割草机控制系统结构图Fig.2 Thestructurediagramofthecontrolsystemoftheintelligentmower
1.3 智能割草机控制系统数据管理模块的设计
在智能割草机控制系统数据管理模块的设计中ꎬ涉及到了电子地图、行走记录、边界判断及障碍物检测等信息ꎮ这些数据信息存储量大ꎬ且需要S5PV210处理器能够根据传感器检测进行快速的响应ꎬ要求处理器具有很强的实时性和高信息吞吐量ꎮ因此ꎬ本系统引入了Sqlite数据库ꎬ用于整个系统的数据存储、处理ꎮ系统数据管理模块如图3所示ꎮ
图3 智能割草机控制系统数据管理模块Fig.3 Thedatamanagementmoduleoftheintelligentlawn
mowercontrolsystem
位置传感器确定智能割草机的位置信息后ꎬ将割草机的坐标发送给位置确定系统ꎻ障碍物检测系统则实时获得障碍物距离信息ꎬ然后微处理器将割草机位置与障碍物距离信息进行融合处理ꎬ并将结果存放在Sqlite数据库ꎻ最后ꎬ根据数据库解析结果对割草机的
运动行为进行规划ꎬ并指导行为控制系统对割草机做出相应的动作指示ꎮ
2 智能割草机运动方式的设计
2.1 智能割草机运动结构模型智能割草机一般是户外工作ꎬ工作环境比较差ꎬ且草坪比较柔软ꎬ往往会出现移动困难等问题ꎮ因此ꎬ割草机一般采用轮式、履带式和足式3种驱动方式:足式驱动方式动力足ꎬ移动速度快ꎬ一般适用于恶劣条件下的作业环境ꎻ轮式驱动根据轮子的多少又分为双轮、三轮和四轮ꎬ三轮驱动方式结构相对简单ꎬ承载能力也比较强ꎬ能够满足一般需要ꎮ由于智能割草机工作环境一般是在条件较好的草坪上ꎬ综上述讨论内容ꎬ本文用三轮驱动方式ꎬ具有结构简单及运动灵活的优势ꎮ智能割草机三轮驱动结构示意如图4
所示ꎮ图4 智能割草机三轮驱动结构图Fig.4 Thethreewheeldrivestructurediagramofintelligentlawnmower
2.2 智能割草机运动学模型
智能割草机运动模块是整个控制系统的重要模块ꎬ高效、稳定的运动系统是智能割草机高质量完成作业的前提ꎮ为了使割草机在作业过程中具有稳定、准确、灵活等优点ꎬ本文采用两轮差动驱动的方式控制割草机的移动ꎬ前轮的作用用于保持车身的平衡ꎮ智能割草机运动学模型如图5所示ꎮ
图5 智能割草机运动学模型Fig.5 Thekinematicmodeloftheintelligentlawnmower
智能割草机采用两轮差动驱动的驱动方式ꎬ在计算中以两后轮中心线中点为运动中心点ꎬ设vl和vr为机器动力轮的移动速度ꎬ其运动学模型计算方程为x′
y′θ′
éëêêêêêùûúúúúú=cosθ0sinθ001éëêêêêêù
ûú
úúúú
vωéëêêùûúú(1)
v=vt+vr()/2
ω=vr-vt()/L
{(2)
922
2019年6月 农机化研究 第6期将式(1)和式(2)联立离散化后得xk+1()=xk()+vk()Tscosθk()yk+1()=yk()+vk()Tssinθk()θk+1()=θk()+ωk()Tsìîíïïïï(3)vk()=vlk()+vrk()[]/2ωk()=vrk()-vlk()[]/L{(4)其中ꎬC(xꎬy)为模型计算参考点ꎻθ为智能割草机的移动方向导向角ꎻω为智能割草机运动角速度ꎻv为智能割草机的前进速度ꎻL为智能割草机两后轮之间的距离ꎻTs为采样周期ꎮ2.3 智能割草机运动路径规划智能割草机运动路径规划的要求是割草机最后能够将整个目标草坪全部作业完毕ꎬ不会留下任何死角的地方ꎮ因此ꎬ合理的路径规划策略是割草机控制系统的重要部分ꎬ比较常用的运动路径规划策略有直线和边界跟踪两种剪草模式ꎬ如图6所示ꎮ图6 割草机的两种剪草模式Fig.6 Thetwokindsofgrasspatternoflawnmower采用直线剪草模式时ꎬ割草机在转向过程中ꎬ会出现不同程度的重叠路径ꎬ增加割草机总行程ꎻ而采用边界跟踪剪草模式时ꎬ割草机器人转向频率会增加ꎬ重叠路径较直线剪草模式不会减少太多ꎬ但频繁转向带来的误差却会大大增加ꎮ因此ꎬ本文采用直线剪草模式遍历整块草坪区间ꎬ在前向的电子篱笆传感器判断即将达到草坪边缘时ꎬ割草机自动后退1个车身的距离ꎬ并左转180°ꎬ完整转向作业ꎬ这样就可以遍历整个割草区域ꎮ3 智能割草机控制系统的软硬件设计3.1 智能割草机控制系统硬件设计智能割草机主体为一个三轮的移动小车ꎬ后轮采用差分双电机驱动的方式ꎬ前轮采用万向轮起到割草机方向引导的作用ꎮ智能割草机核心部分是控制割草机在指定区域按照要求进行移动ꎬ而不需要人为控制ꎬ也不涉及复杂的图像处理算法ꎮ系统只需要S5PV210微处理器通过GPIO管脚输出PWMꎬ配合驱动控制模块便可控制小车的前进、后退、左转、右转等操作ꎬ实现智能割草的功能ꎮ智能割草机控制系统硬件框架如图7所示ꎮ
图7 智能割草机控制系统硬件框架图Fig.7 Thehardwareframediagramofthecontrolsystemof
theintelligentmower
在小车的硬件设计中ꎬ为了更好地实现数据处理的高时效性和高高信息吞吐量ꎬ需要给S5PV210微处理配备强大的外设ꎮS5PV210微处理器核心框架如图8所示ꎮ
图8 S5PV210处理器框架图Fig.8 TheframeworkdiagramofS5PV210processor
S5PV210处理器外围器件主要包括UART、
SDRAM(512MB)、JTAG、NandFlash(1G)、USB、LCD、NorFlash(16MB)、网口(10M)、串口、SD/IF卡超声波
传感器、电机驱动及电子罗盘等ꎮ3.2 割草机器人控制系统软件设计
为了方便软件的扩展和移植ꎬ系统软件采用模块化的设计思想ꎬ程序采用C和C++混合编程ꎬ硬件开发环境为TITY210ꎬ软件开发环境为Uboot2013.01和Linux3.14ꎮ系统软件包括主程序、路径规划、电机驱
动和传感器数据采集等多个模块ꎮ其中ꎬ路径规划子程序流程如图9所示ꎮ
4 测试与分析
为了验证该智能割草机控制系统是否满足设计需求及其智能程度的高低ꎬ特在某草坪区域进行了实地割草测试ꎬ试验结果如图10所示ꎮ图10中ꎬ椭圆为割草机作业起点ꎬ方框为终点ꎬ三角形为障碍物区域ꎮ由此可以看出:该智能收割机实现了整个目标草坪的割草作业ꎬ没有留下任何死角地方ꎬ且路径规划路线最优ꎻ割草机成功避开了障碍物ꎬ在整个过程没有发生碰撞行为ꎬ成功地到达了终点ꎬ证明该智能割草机的高实时性和高可靠性ꎮ
032
2019年6月 农机化研究 第6期