一种典型步进电机驱动器的设计
一文搞懂步进电机特性原理及驱动器设计
一文搞懂步进电机特性原理及驱动器设计1、步进电机的概念步进电机是将电脉冲信号,转变为角位移或线位移的开环控制电机,又称为脉冲电机。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。
当步进驱动器接收到一个脉冲信号时,它就可以驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”。
步进电机的旋转是以固定的角度一步一步运行的,可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的,同时可以通过控制脉冲频率,来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机多用于数字式计算机的外部设备,以及打印机、绘图机和磁盘等装置。
2、步进电机的特点步进电机工作时的位置和速度信号不反馈给控制系统,如果电机工作时的位置和速度信号反馈给控制系统,那么它就属于伺服电机。
相对于伺服电机,步进电机的控制相对简单,但不适用于精度要求较高的场合。
步进电机的优点和缺点都非常的突出,优点集中于控制简单、精度高,缺点是噪声、震动和效率,它没有累积误差,结构简单,使用维修方便,制造成本低。
步进电机带动负载惯量的能力大,适用于中小型机床和速度精度要求不高的地方,缺点是效率较低、发热大,有时会“失步”。
优缺点如下所示。
优点:1. 电机操作易于通过脉冲信号输入到电机进行控制;2. 不需要反馈电路以返回旋转轴的位置和速度信息(开环控制);3. 由于没有接触电刷而实现了更大的可靠性。
缺点:1. 需要脉冲信号输出电路;2. 当控制不适当的时候,可能会出现同步丢失;3. 由于在旋转轴停止后仍然存在电流而产生热量。
3、步进电机的分类在相同电流且相同转矩输出的条件下,单极型步进电机比双极型步进电机多一倍的线圈,成本更高,控制电路的结构也不一样,目前市场上流行的大多是双极型步进电机。
步进电机在构造上通常主要按照转子特点和定子绕组进行分类,下面将详细介绍这两种类型的分类。
按照转子分类,有三种主要类型:反应式(VR型)、永磁式(PM型)、混合式(HB型)。
一种高细分,大功率步进电机驱动器设计
关键 词 : I T 8 步进电机 驱动器 T ̄ I I 2 B 中 图分 类号 : M 8 T 3 文献标识码: A
文章编 号 : 6 2 3 9 ( O O O ( -O 2 - 2 1 7 - 7 1Z l ) 6e 1 4 0 )
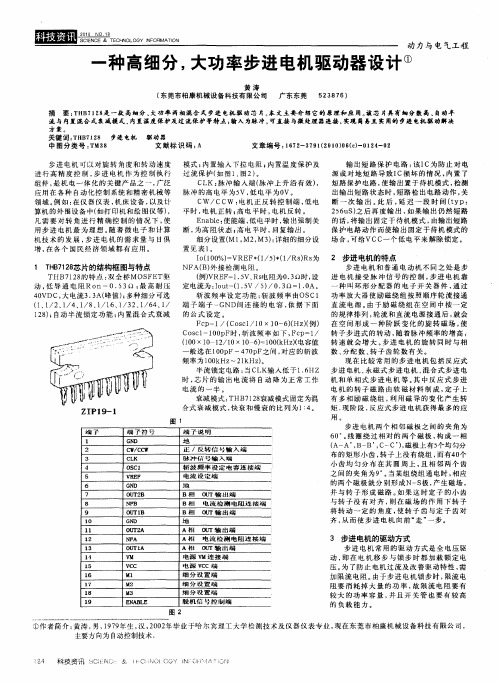
模式 ; 置输 入 下 拉 电 阻 ; 内 内置 温 度 保护 及 输 出短 路 保 护 电 路 : I 该 C为 防 止 对 电 过 流保 护 ( 图 l 图 2 。 如 、 ) 源或 对 地 短 路 导 致I 损 坏 的 情 况 , 置 了 C 内 C K : 冲 输 入 端 ( 冲 上 升 沿 有 效) L 脉 脉 , 短 路 保 护 电路 , 输 出 置于 待 机 模式 , 测 使 检 脉 冲 的高 电 平为 5 低 电平 为0 V, V。 出输 出 短路 状 态 时 , 路 检 出 电路 动 作 , 短 关 CW /CCW : 电机 正 反 转 控 制 端 , 电 断 一 次 输 出 。 后 , 迟 一 段 时 间 ( y 低 此 延 t p: 平 时 , 机 正 转 ; 电平 时 , 电 高 电机 反转 。 2 6 S 之后 再 度 输 出 , 果输 出 仍 然 短 路 5u ) 如 En b e 使能 端 , 电平时 , 出强制 关 的 话 , 输 出 固定 于 待 机 模式 , a l: 低 输 将 由输 出短 路 用 步 进 电机 最 为 理 想 。 着 微 电 子 和 计 算 断 , 高 阻状 态 高 电平 时 , 随 为 回复输 出 。 保 护 电路 动 作 而 使 输 出 固定 于待 机 模式 的 细 分设 置 ( 1 M2, ) 详细 的细 分 设 场 合 , 给 VC M , M3 : 可 C一 个低 电平 来 解 除 锁 定 。 机 技 术 的 发 展 , 进 电机 的需 求 量 与 日俱 步 置 见 表 1 。 增, 在各 个 国 民 经 济领 域都 有应 用 。 I (0 %) V F ( / )( / ) 为 2 步进 电机 的特点 O 1 0 = RE 1 5 十 1 RsRs NF B 外 接 检测 电阻 。 A( ) 步 进 电机 和 普 通 电动 机 不 同 之 处 是步 1 T B18 H 7 芯片 的结构框 图与特点 2 THB7 2 的特 点 : 全 桥M OSF l8 双 ET驱 ( vREF . V、 电阻 为0 3 例) =1 5 Rs . 0时 , 设 进 电 机 接 受 脉 冲信 号 的 控 制 , 进 电机 靠 步 动 , 导 通 电 阻 R03 低 I一0. ; 高 耐 压 定 电流为 :o t ( . V/5 / . Q=1 0 . 5 最 3 Iu- 1 5 ) 03 .A。 种 叫 环 形 分 配 器的 电子 开 关 器 件 , 过 通 4 VDc, 电 流3 3 峰值 )多种 细 分可选 0 大 .A( ; 斩 波 频 率 设定 功 能 : 斩波 频 率 由O C1 功率 放 大 器 使 励 磁绕 组 按 照 顺 序轮 流 接 通 S ( 、 /2、 /4、 /8 1 6、 / 2、 / 4 1 端 子 端 子 一G 1l 1 l 、 /l l 3 1 6 、 / ND间连 接 的 电 容 , 依据 下 面 直 流 电 源 。 由于 励 磁 绕 组 在 空 间 中 按 一 定 18; ) 自动半 流 锁 定功 能 ; 置混 合 式 衰减 的 公 式 设 定 。 2 内 的规 律 排 列 , 流 和 直 流 电源 接 通 后 , 轮 就会 F p /( o c /1 c -l c s l 0×l — ) ) ) 在 空 间 形 成 一 种 阶 跃 变化 的旋 转 磁 场 , 0 6( ( Hz 例 使 CO C =1 0 S 1 0 pF时 , 波频 率 如 下 , c =1 转 子 步 进 式 的转 动 , 斩 Fp / 随着 脉 冲 频 率的 增 高 , (0 ×i 1 / 0 0 ) 0 ( Hz( 1 0 0 2 1 1 6=1 0k ) X 电容值 转 速 就 会 增 大 。 进 电机 的 旋 转 同 时 与 相 步 步 进 电机 可 以 对 旋 转 角度 和 转 动 速 度 进 行 高 精 度控 制 , 进 电机 作 为控 制 执 行 步 组 件 , 机 电 一 体 化的 关 键 产 品之 一 , 是 广泛 应 用 在 各种 自动 化 控 制 系统 和 精 密 机 械 等 领域。 如 : 例 在仪 器 仪 表 , 床 设 备 , 机 以及 计 算机 的外 围设 备 中( 如打 印机 和 绘 图仪 等 ) , 凡需要对转角进行 精确控制的情况下 , 使
一种用于实验教学的步进电机驱动器的设计
性 制造 . 因此 , 步进 电机 的工 作 原理 及各 种 控 制 方法 是 大 中专 院校专 业 教 学 的 重要 内容 . 目前 的 步 而
其绕组输入的电脉 冲信号 ( 冲频率 、 脉 脉冲数 量、 向绕组输入 脉冲的顺序 ) 因为脉 冲信号要按一 .
第2卷 第9 8 期
21 0 1年 9月
吉 林 化 工 学 院 学 报
J U N LN IS HUT FC MI A E HN L G O R ALOFJ I N T I E0 HE C LT C O 0 Y
V0 . 8 No 9 12 . S p. 2 I e 01
摘要 : 提出一种适 合大中专院校应用于实 验教学 的步进 电机驱动器 , 它包括 电源部分 、 制部分 和功 率 控 驱 动部分. 该驱动器是 专门针对 实验教学 而设计 的, 具有既适 合实验 室工作环境 要求 , 又适合 实验教 学 内容范 围广泛要求的功能. 采取 多种抗干扰措施 , 工作稳定 可靠. 关 键 词: 实验教学 ; 步进 电机 ; 冲控制 ; 率驱 动器 脉 功
文章编号 :072 5 ( 0 1 0 - 4 -3 10 - 3 2 1 )90 90 8 0
一
种用 于 实验 教 学 的 步进 电机 驱 动 器 的设计
袁 贵栋 李翠英 路 增立 任有 志 , , ,
(. 1河北科技 大学 机械E-- r gF ̄-程学院, - 河北 石家庄 00 1;. 50 82 河北科 技大学 信 息科学 与工程学 院, 河北 石 家庄 001 ;. 5083河北科技大学 现代教育技术 中心 , 河北 石家庄 001) 508
文献标志码 : A 中图分类号 : P7 T 3
基于STM32的微型步进电机驱动控制器设计

3.2 控制器控制策略
STM32软件负责该模块的主控制器,首先让启动模式处于非启动状态(DISABLE),外部中断也处于关闭状态。一旦启动模式被打开,即点亮LED;其次,进行速度设置、细分系数设置以及旋转角度设置。睡眠模式下LED缓慢闪烁。具体该驱动控制器软件设计流程图。
4 结论
通过系统对软硬件进行调试,该控制器实现了对步进电机速度、细分系数、任意角度的设置,并达到了预期设定的目标。此控制器可以应用在相对比较精细的项目控制中,加快项目研发周期。该模块的主要缺陷就是输出驱动电流不够大,无法应用在扭力比较大的场合中,因此,通过上述对A4988模块的分析,可以再对A4988芯片进行改进,更换导通电阻小、驱动电流大的MOS管,实现电机驱动器的设计。
1.2 A4988的工作原理
为了更加清晰地分析A4988的工作原理,首先深入分析A4988的内部结构。为A4988的内部结构图和典型的外部电路连接图。
由图1所示,A4988有一个编译器(Translator),主要负责微控制器和驱动电路的信息交互。通过该编译器可产生DA信号,配合比较器辅助PWM锁存器修复衰减信号,并且该编译器能够产生逻辑电平控制逻辑控制器,逻辑控制器再配合电流调节器和N型MOS管驱动电压共同驱动两路全桥电路。电路中所标电容必须严格与技术文档中所给的相同,Rosc主要更改并修复衰减模式,接VDD自动修复衰减,接GND电流衰减设置为增减电流同时修复。SENSE1和SENSE2检测驱动输出电压,实则是实时检测输出电流,供电流调节器调节输出电流信号,形成闭环控制。因此SENSE1和SENSE2管脚连接的电阻非常关键,一般这个电阻的阻值在零点几欧姆左右。
(1)串口通信模块[6]:主要负责上位机和下位机通信。上位机通过串口通信模块发送相应的功能指令给下位机,下位机执行上位机的指令并控制A4988驱动器模块驱动步进电机。。
基于MCU控制的步进电机驱动器设计

1.1 步进电机的概述....................................................................................................1 1.2 步进电机的驱动技术及发展................................................................................2 1.2.1 步进电机驱动技术.......................................................................................2 1.2.2 步进电机的驱动软件技术...........................................................................3 1.3 步进电机的细分驱动技术......................................................................................3 第二章 基于单片机的二相步进电机细分驱动系统........................................................5 2.1.1 混合式式步进电机的特点...........................................................................5 2.1.2 混合式步进电机的基本工作原理...............................................................6 2.2 C8051F020 单片机..................................................................................................7 2.2.1 C8051F020 功能特点...................................................................................7 2.2.2 单片机最小系统介绍..................................................................................8 2.3 L297/L298 功能介绍............................................................................................12 2.4 步进电机的细分及其电流最佳设计.................................................................13 2.4.1 细分原理..................................................................................................13 2.4.2 步进电机电流的非线性设计....................................................................15 第三章 硬件设计................................................................................................................16 3.1 硬件电路的具体应用............................................................................................16 3.1.1 C8051F020 功能模块.................................................................................16 3.1.2 L297/L298 电路设计.................................................................................17 3.2 控制电路................................................................................................................19 3.2.1 键盘输入....................................................................................................19 3.2.2 串行通信接口............................................................................................20 第四章 步进电机驱动电路软件设计................................................................................21 4.1 驱动器个程序模块开发.......................................................................................21 4.1.1 4.1.2 4.1.3 4.1.4 主程序设计................................................................................................21 定时器中断服务程序................................................................................22 按键输入及控制程序................................................................................23 串口通信程序............................................................................................24 2.1 步进电机的结构特点与工作原理..........................................................................5
一种简单实用的步进电机细分驱动器

列 开始 。 这对步进 电机使用在某些数控设备时是非常
重 要 的 _ 触 发 器 的 C 脉 冲 取 自 4 1 J K P 5 6的进 位 脉 冲 C , 一
维普资讯
器件与应用
一
种简单 实用 的步进 电机
细 分驱 动 器
沈诗佳 程 琳
( 肥 电力学 校 2 0 1 合 0 ) 3 5
对步进 电机进 行细分驱动 ,可 以减小 步距 角 ,改 善低频共振 ,降低运行噪声 。本 文所设计 的细 分驱动 器 只用 少量 中规 模 集成 电路 ,具 有简 单 实 用、成 本 低 、容 易实 现等 优 点 ,设计 原 则适 用 于各 种 步进 电 机 。现 以三 相步进 电机六 拍运行 为例进 行 具体设计 , 为简单 计 ,细分 数取 8 。事 实上更高 的细 分 ,其 步距
表 1三 相六 拍 8 细分时序 于 4 1 在 低 8 时 o = ,在 高 56 位 40 8 时 0 = 。因此 , 个 异 或 门 位 4L 三 的输 出 0 、 2 、 1 为 4 1 3 0 0 56
A
低 8位 时 相 应 输 出 的 原 码 ,高 8
B C
角将接近或小于步进电机最大步距角误差及传动机构误 差 ,故更高 的细分对提 高传动精度 井无实 际意义 该
设计 的框 图如图 l ,三相六拍 8细分 的时序见表 l 。
的的两倍 , 这是 因为步进 电机 步距 角与给定 电流不成线 性关系 ,在初通 电时,其步距角较小 , 第一级 电流变化 较大有利于改善步距角的线性 。 考虑到步进 电机的正反 转 图 2 形 的变 化 方 向 应 该 是可 逆 的 波
一
二 :
的 … ’… … … … … 。 … : … 一 … ’ …
三相反应式步进电机驱动器的设计与实现

0 引言
人工智能是指研究、开发用于模拟、延伸和扩展人的职能 的理论、方法、技术级应用系统的一门新的技术科学[1],在工 程、技术研究等领域很多方面都有广泛的应用,为国民经济的 发展和人类生活的改善作出了巨大的贡献。以下将对人工智能 技术在电气自动化控制方面的应用作一探讨。
1 人工智能控制优势分析
人工智能控制的方法有很多种,对于不同的控制类型通常 采取不同的控制方法。人工智能主要利用人工智能函数近似器 加以处理[2],例如 AI 控制器,神经、模糊、模糊神经以及遗传算 法都可看成一类非线性函数近似器。它具有很多常规函数估计 器所不具备的优势:(1)设计思路简单。人工智能的设计不需要 控制对方的模型,而传统的古典控制器要在对方的模型上加以 设计,并且存在的不确定因素较多[3],例如很难得到控制对象 的精确动态方程,参数变化,非线性时往往不知道,也是造成传
步进电机以其良好的可操控性,在生产、生活的各个环节 都得到了广泛的应用,尤其是在自动化水平不断提高的今天, 步进电机更具有良好的应用前景,如在微控制、精确控制、特种 控制等方面发挥了重要作用。反应式步进电机步距角为 1.5°,转 子上均匀分布一些小齿,定子齿有 3 个励磁绕阻,其几何轴线依 次分别与转子齿轮轴线错开。电机的位置和速度与导电次数(脉 冲数)和频率成一一对应的关系,其方向由导电顺序决定。
统古典控制器的弊端。(2)控制器的性能得以提高。人工智能控 制器改变了相关参数,例如响应时间、下降时间等,性能得到很 大的提高。比如,现在使用的模糊逻辑控制器的上升时间比最 优 PID 控制器快 1.5 倍,下降时间快 3.5 倍。(3)简单容易操作。 古典控制器存在着调节能力差的缺陷,而人工智能控制器相对 而言降低了控制难度,对新信息和数据的适应能力也得到了改 进。在不具备相关专业知识的情况下,也可以通过相关信息提示 进行设计,相对而言简单且容易操作。
一种新型反应式步进电机驱动器的设计与研究

科技资讯2008N O.11SCI ENC E &TEC HNO LO GY I N FO RM A TI ON 工程技术在开发新型数控标牌打印机(Z L 99247093.5)的过程中,面对着大批量生产线的快节奏对打印机的速度提出很高的要求,驱动与控制系统的性能很大程度上决定了整个数控标牌打印机的性能。
作为进行商品化的新产品研发,必须考虑批量生产的成本和用户的经济承受能力,所以,该打印机选择了反应式步进电机驱动与控制方案[1]。
但是目前常见的反应式步进电机驱动电源的驱动电路,都有很大缺陷,不能满足该数控打印机的性能指标要求:譬如,单电压驱动电路虽然线路简单,但是其限流电阻R 功耗大,电源效率低,电机高频性能不好[2];高低压切换驱动电路改善了步进电机的快速性,但是由于增加了一个高压电源,而是电源结构复杂,成本变高[3];由于在脉冲加入时采用高电压供电,故对功放管的特性要求较高;在带负载的情况下,低频运行特性不理想;目前国内外步进驱动器产品采用斩波驱动方式,极大地改善了电流波形,采用能量反馈,提高了电源效率,改善了矩频特性,但是低速运行时由于绕组电流冲击大,使低频产生振荡,运行不平稳,噪声大定位精度没有提高等[4]。
由于数控标牌打印机一般用于产品生产线中,因此对设备的可靠性、动作的准确性和快速性要求较高。
考虑到设备的成本及对电机高频响应的要求,拟选用45BF005、55BF009反应式步进电机。
由于反应式步进电机较其它形式步进电机所要求的驱动电流大,所以研发生产出运行性能好、节省能源、可靠性好、造价低廉的步进电机驱动器是产品成败的关键。
1新型的恒流斩波式步进电机驱动器组成针对当前步进电机驱动器存在的不足,结合当前新技术、新器件的不断出现,本文提出了一种新型步进电机驱动器。
在继承现有驱动器一些成熟的技术成果的基础上,充分利用新型电子器件,提出了改善驱动器性能的新技术和方法,研制出一种新型驱动器,它主要由功率输出、斩波器、吸收回路与能量回收电路等几个部分构成,下面分别予以介绍。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
期”m州嘲
周围布上星行地,同时设计印刷电路板时应考虑器件的散热
设计。 3)为保证输出电流取样的精确,电流的取样电阻有单 独地,并将其连到器件周围的星形地上,而且引线越短越好。 4)根据负载电机参数,设计相匹配的Lc电流滤波器。
.66一
戮茹茹镧
罔3电机绕组的电压测试图
步进电机是将电脉冲信号转变为角位移或线位移的开环 控制元件,由于步进电机的步距不受电压波动和负载变化的 影响,也不受环境条件的限制,而只与脉冲频率成正比。它
能够按照控制脉冲数的要求,立即起动、停止、反转,在不
步进,省去了相序表,高频控制线及复杂的编程接口。这使 其更适于应用在没有复杂的微处理器或微处理器负担过重的 场合。同时A3977的内部电路可以自动地控制其PWM操作 工作在快、慢及混合衰减模式。这不但降低了电机工作时产 生的噪声,也同时省去了一些额外的控制线。 其内部低输出阻抗的N沟道功率DMOS输出结构,可以 使其输出达到2.5
ofChina,舰'an 710065,China)
to
Abstract:The stepper motor angle displacement.A3977
is
is
a
open-loop control
to
component,which transforms the electrical—pulse signal
本文链接:/Periodical_dzsjgc201411019.aspx
L.Boylested,Louis
Electronics,201 1,4:69—71.
【6】6梁晓雯.电子系统设计基础【M】.合肥,中国科学技术出版
类功放电路通过给功放管施加一定的直流偏置电压,使功放
管在静态时处于微导通状态,非线性失真比乙类小。在基本
Nashelsky.Electronic devices and Circuit
率放大电路的输出波形均不存在交越失真,可见以运放为前
置级的功率放大电路可减小交越失真。 参考文献: [1】聂典,丁伟.Muhisiml0计算机仿真在电子电路设计中的应 用[M].北京,电子工业出版社,2009. [2】杨拴科,徐正红.模拟电子技术基础【M】.北京,高等教育出 版社.2004. [3]严行全.浅谈功放中的负反馈叨.中国新技术新产品2009(19):
动进而得到灵活的角度控制(位置控制),并可得到与该脉 冲信号频率成正比例的转动速度。该步进电机驱动器在工程
图2驱动器硬件构成框图
stepper motor
应用中运行良好可靠、俯仰位置测量与定位精度高。
driver
Hardware composition of
图3和图4为用示波器测试电机绕组的电压及电流测
in
a
this paper,and the measured
certain
application
are
also giveor driver is easily controlled,lowly costed,
precisely positioned and lowly consumed. Key words:stepper motor;stepper motor driver;fractionize;A3977
135-136. YAN Xing-quan.Introduction
to
由于电路中引入了电压并联负反馈,从而提高了功率放大电
路的稳定性。电路的闭环电压增益A。,一-R:/R.。
negative
feedback of the power
其输出信号的频谱图亦只有1 kHz基波频率,没有谐波
成分,说明电路没有发生非线性失真。
大学出版社,2006.
Allegro
Microsystem,LL.A3977-Datasheet.ashx.【EB/OL].(201 3—
04—23)[2013-05-121.http://www.allegromicro.com/-/media/
Files/Datasheets/A3977一Datasheet.ashx.
Theory【M】.美国,2002.
(上接第66页)
参考文献: [1】顾绳谷.电机及拖动基础【M]北京:机械-r&出版社,1981. 【2】坂本正文(日).步进电机应用技术【M】.王自强,译.北京:科 学出版社.2010. 【3】王彦.基于FPGA的工程设计与应用[M】.西安:西安电子科
图4电机绕组的电流测试图
3工程应用及试验结果
在某低轮廓车载卫星通信天线的天线控制系统通信板的 俯仰驱动控制中采用了上述设计的多通道智能型的步进电机
驱动器。步进电机选用一种结构体积小的高性能两相混合式
黠
Fig.2
步进电机,型号:35BYG250B,电流:O.5 A。俯仰的角度测
CPI,D
逻辑 垂忙
量省略了测速传感器及位置角度传感器,利用了步进电机在 不丢步的情况下运行时,依照输入的脉冲数作固定角度的转
Fig.3 Measured vohage
cLlnPs
of ma(’hine winding
(下转第70页)
万方数据
囊譬H曩粤E^■‘^!一
‘八八八八八
/\/V V。V\
图9输出波形
Fig.9 Output waveform
《电子设计工程》2014年第11期
型功放电路前端串接运算放大器,形成闭环电压负反馈,可 以提高功放电路的稳定性。前置级为运放的乙类、甲乙类功
中图分类号:TN721.5
文献标识码:A Design of
a
文章编号:1674—6236(2014)1卜0065—02
typical stepper motor driver
XI Hai・-yon
(The 39th
Institute,Electronic
Science and Technology Group Corporat幻n
Fig.4 Measured voltage
CUFVeS
of machine vdnding
技大学出版社,2007.
【4]周立功.ARM嵌入式系统基础教程[M].北京:北京航空航天
4结束语
应用内置译码器步进电机微步进驱动芯片A3977设计的 步进电机驱动器在丁程已经得到成功应用。应用试验结果表 明采用上述设计方法设计的驱动器驱动两相混合式步进电机 在要求低速、低功率、结构紧凑、成本低、定位精度高的应 用场合值得推广应用。 【5]5
A,35
丢步的情况下运行时,角位移的误差不会长期积累,所以, 步进电机在速度、位置等控制领域中的应用愈来愈广泛川。 步进电机属于DC驱动的同步电机,但无法直接用DC电源来 驱动。需要配置专用的驱动器才能使用口】。
V。这一结构的另一优点是,使它能
完成同步整流功能。由于有同步整流流功能,既降低了系统 的功耗,又可以在应用时省去外加的肖特基二极管。 A3977的休眠功能可以使系统不工作时的功耗达到最低。 休眠时芯片的大部分内部电路,如输出DMOS、比较器及电 荷泵等都将停止工作。从而在休眠模式时,包括电机驱动电 流在内的总电流消耗在40 pA以内。此外,内部保护电路还 有利用磁滞实现的热停车、低压关断及换流保护等功能。
主要功能包括:步进细分控制、方向控制、速度控制、电流 控制、睡眠控制及功率放大。图l为A3977的逻辑框图口】。 由于采用了内置译码器技术,A3977可以很容易的使用 最少的控制线对步进电机实施微步进控制。其最简单的步进 输入只需“STEP”(步进)和“DIR”(方向)2条输入线。 通过“STEP”脚简单的输入1个脉冲就可以使电机完成1次
结合上述硬件设计配以完善的软件设计就可以完成驱动 器的完整设计,软件设计包括两部分;ARM微处理器应用软
试图。
测试条件为:电机转速900
rpm
细分控制1/4步
件及CPLD逻辑器件硬件语言设计。 驱动器硬件设计中的注意事项:
1)A3977芯片PFD、VBB引入端应加入相对应的去耦电
容(越靠近芯片越好);
amplifier[J3.China
NewTechnologies and
Products,2009(19):135-136.
【4】杨刚,周群.电子系统设计与实践【M】.北京,电子工业出版 社.2004.
3结论
文中通过Multisim软件对4种不同功率放大电路的仿真, 绘制各功率放大电路的原理图,进行瞬态分析和傅里叶分析, 可以概括总结出乙类功率放大电路的特点是存在非线性失真
作者简介:郗海燕(1968--),女,陕西蓝田人,高级工程师。研究方向:伺服系统控制与微电子技术应用。
一65—
万方数据
《电子设计工程》2014年第1l期
‘1
;牟三
一?一
木
一
端,一
图l
Fig.1
A3977逻辑框图
A3977 logic diagram Of A3977
步进电机驱动器。该驱动器主要功能为:接收控制器的控制 速度指令控制步进电机运行;向控制器发送各电机运行状态; 对电机的运行状态进行监控及保护。图2为驱动器的硬件构 成框图。
大(交越失真),失真的原因是晶体管存在死区电压。甲乙
[5】杨锐.佣,功放电路参数的仿真分析叨.电子制作,2011(4).-69-71.
YANG Rui.The simulation analysis of OTL amplifier circuit
parameters【J】.Practical
社.2008. 【7】Robert
收稿日期:2013—09—16 稿件编号:201309123
2某驱动系统设计应用
某低轮廓车载卫星通信天线要求对天线阵的通信板实 现准确的俯仰同步定位控制。通信板包括3个接收板和一个 发射板。天线阵的通信板具有轻负载、结构紧凑、空间狭小 等特点。驱动电机选用一种结构体积小的高性能两相混合式 步进电机。针对这一工程需求特点,采用微步进驱动芯片 A3977结合ARM嵌入式微控制器设计了一款多通道智能型的