第五章PLC的步进电机控制系统
电气控制与plc第五章

开关SQ2
X03
开关SQ3
X04
选择按钮S07
X05
输出
输出设备
输出编号
向前接触器 KM1
Y00
甲装料接触器
KM2
Y01
乙装料接触器
KM3
Y02
向后接触器 KM4
Y03
车卸料接触器 KM5
Y04
选择按钮S08
X06
44
电气控制与plc
5.2.4 PLC控制工作方式可选的运料小车
45
电气控制与plc
S07
S08
第一方式
0
0
第二方式
1
0
第三方式
0
1
第四方式
1
1
42
电气控制与plc
5.2.4 选择性流程—— PLC控制工作方式可选的运料小车
43
电气控制与plc
5.2.4 选择性流程—— PLC控制工作方式可选的运料小车
输入
输入设备
输入编号
启动按钮S01
X00
停止按钮S02
X01
开关Sቤተ መጻሕፍቲ ባይዱ1
X02
电气控制与plc
5.2.1 简单流程编程——PLC控制冲压生产线
输入
输出
输入设备
输入编号
输出设备
输出编号
启动按钮S01 限位开关SQ1 限位开关SQ2 限位开关SQ3
X000 X001 X002 X003
进料带电动机 出料机械手左移电磁
阀YV1 进料机械手左移电磁
阀YV2 进料机械手吸合电磁
阀YV3 压模电磁阀YV4 出料机械手右移电磁
M8002 开机脉冲
S0
plc步进电机控制方法攻略程序图纸
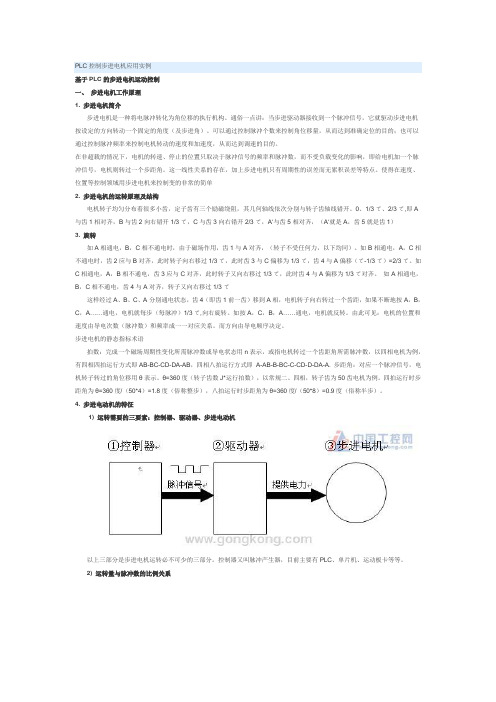
PLC控制步进电机应用实例基于PLC的步进电机运动控制一、步进电机工作原理1. 步进电机简介步进电机是一种将电脉冲转化为角位移的执行机构。
通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;也可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单2. 步进电机的运转原理及结构电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。
0、1/3て、2/3て,即A 与齿1相对齐,B与齿2向右错开1/3て,C与齿3向右错开2/3て,A‘与齿5相对齐,(A‘就是A,齿5就是齿1)3. 旋转如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力,以下均同)。
如B相通电,A,C相不通电时,齿2应与B对齐,此时转子向右移过1/3て,此时齿3与C偏移为1/3て,齿4与A偏移(て-1/3て)=2/3て。
如C相通电,A,B相不通电,齿3应与C对齐,此时转子又向右移过1/3て,此时齿4与A偏移为1/3て对齐。
如A相通电,B,C相不通电,齿4与A对齐,转子又向右移过1/3て这样经过A、B、C、A分别通电状态,齿4(即齿1前一齿)移到A相,电机转子向右转过一个齿距,如果不断地按A,B,C,A……通电,电机就每步(每脉冲)1/3て,向右旋转。
如按A,C,B,A……通电,电机就反转。
由此可见:电机的位置和速度由导电次数(脉冲数)和频率成一一对应关系。
而方向由导电顺序决定。
步进电机的静态指标术语拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即A-AB-B-BC-C-CD-D-DA-A. 步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。
PLC实现步进电机的正反转及调整控制
PLC实现步进电机的正反转及调整控制
一、PLC实现步进电机的控制原理
拿步进电机举例,大家可以把它想象成一个隔著一定距离的圆盘,隔着每一环的距离形成齿轮的节点。
步进电机的正向或反向转动,就是将这一环索引和圆盘一起发动转动。
步进电机的转动,是靠每一步索引圆盘来完成的,每一步都有一个控制信号来告诉电机从哪一环节点开始转动,当接收到控制信号时,电机开始转动,并且每转一圈循环转动几个索引。
1、正向、反向控制
要实现步进电机的正向反向控制,就要在PLC程序中控制信号形式来实现,一般可以使用两个控制信号,一个是正反控制信号,一个是步进电机转动的速度,要求PLC程序根据正反控制信号来实现正向和反向控制。
正反控制信号就是设置一个开关量变量,当这个开关量为ON时,电机运行正转,当开关量为OFF时,电机运行反转,具体可以采用T函数来实现,T11=1,电机正转,T12=0,电机反转。
由于步进电机的转动是一布一射的过程,所以需要用一个电位器来控制步进电机的转动速度,当电位器的旋钮调整到一定位置时,就会给出一定频率的步进信号,PLC程序可以根据此步进信号,来控制步进电机的转动速度。
PLC第五章资料
输入端子
00000 00001 00002 00003 00004
输出电器
接触器KM 电磁阀YV1 电磁阀YV2 电磁阀YV3
输出端子
10000 10001 10002 10003
10
启动按钮 SB1 停止按钮 SB2
00000 00001 θ 00002 θ 00003 θ 00004 00005 COM + 24V —
7
【例1】设计某液体混合装置的PLC控制程序
⑴ 分析工艺过程,明确控制要求 按启动按钮,电磁阀YV1接通 当液位高度到达 I 时, YV1 断 电关闭,而电磁阀YV2接通 当液位高度到达 H 时, YV2 断 电关闭,起动电动机M进行搅拌 1min 后电动 机 M 停止 , YV3 接 通,放出混合液去下道工序 当液位下降到 L 时,延时 2s 后 使YV3断电,并开始下一循环 按下停机按钮后,不立即停, 而是待一个工作循环完成时才 停止。
YV1
液体A YV2 液体B H I L M
YV3
8
⑵ 统计输入/输出点数并选择PLC型号
共有5个输入点
按钮2个 液位传感器3 个 共有4个输出点 电磁阀3个 电动机接触器1个 可选用OMRON的CP1H系列PLC
9
⑶ 分配PLC输入/输出点
输入电器
启动按钮SB1 停止按钮SB2 液位传感器H 液位传感器I 液位传感器L
5
梯形图的常用基本电路
启保停电路--电机的启动、保持、停止控制
说明:这种电路具有自锁或自保持作用。 按一下停止按钮,0.02常闭触点断开,使 100.00线圈断电,接触器KM也断电,电 机停转。 6
双向控制电路--电机的正反转控制
互锁
互锁
步进电机PLC控制设计
步进电机PLC控制设计PLC控制系统课程设计第⼀章控制⼯艺流程分析1.1步进电机的控制过程描述⽬前1.2 PLC控制步进电机的控制⼯艺分析时⾄今⽇,软件以及电⼦设备等相关技术都有了长⾜发展。
虽然软件的发展速度⽐不上硬件的发展速度那么迅速,但已能满⾜现在的⼯业需求。
对步进电机的传统控制通常完全由硬件电路搭接⽽成。
随着PLC的普及,现在已普遍采⽤硬件与软件相结合的⽅式对其进⾏控制,这种控制⽅法有很多优点,⽐如:可以实现⾼精度的控制,降低成本,降低控制难度,简化控制电路等。
今后步进电机的总体发展趋势是向着低功耗、⾼频率精度、多功能、⾼度⾃动化和智能化的⽅向发展。
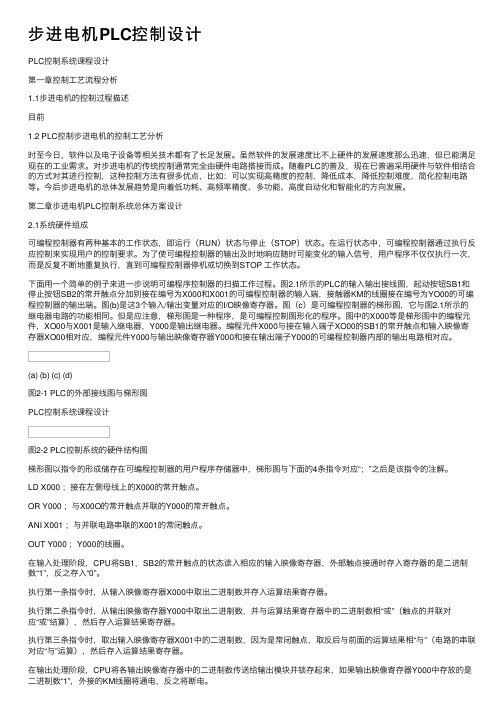
第⼆章步进电机PLC控制系统总体⽅案设计2.1系统硬件组成可编程控制器有两种基本的⼯作状态,即运⾏(RUN)状态与停⽌(STOP)状态。
在运⾏状态中,可编程控制器通过执⾏反应控制来实现⽤户的控制要求。
为了使可编程控制器的输出及时地响应随时可能变化的输⼊信号,⽤户程序不仅仅执⾏⼀次,⽽是反复不断地重复执⾏,直到可编程控制器停机或切换到STOP ⼯作状态。
下⾯⽤⼀个简单的例⼦来进⼀步说明可编程序控制器的扫描⼯作过程。
图2.1所⽰的PLC的输⼊输出接线图,起动按钮SB1和停⽌按钮SB2的常开触点分加别接在编号为X000和X001的可编程控制器的输⼊端,接触器KM的线圈接在编号为YO00的可编程控制器的输出端。
图(b)是这3个输⼊/输出变量对应的I/O映像寄存器。
图(c)是可编程控制器的梯形图,它与图2.1所⽰的继电器电路的功能相同。
但是应注意,梯形图是⼀种程序,是可编程控制图形化的程序。
图中的X000等是梯形图中的编程元件,XO00与X001是输⼊继电器,Y000是输出继电器。
编程元件X000与接在输⼊端⼦XO00的SB1的常开触点和输⼊映像寄存器XO00相对应,编程元件Y000与输出映像寄存器Y000和接在输出端⼦Y000的可编程控制器内部的输出电路相对应。
plc的步进电机控制系统设计
基于PLC的步进电机控制系统设计发布日期:2012-08-24 来源:数字技术与应用作者:田若秋核心提示:文章根据传统步进电机控制中的不足和缺点,将PLC直接控制技术运用于步进电机的控制。
该系统解决了传统控制技术中的各部分硬件的设计、选型、接口匹配往往要花费设计者一很大的精力和劳动,接口信号的匹配以及各器件的质量等对整个系统的可靠性影响很大等缺点。
根据PLC控制步进电机的控制特点及其原理,把软件控制和硬件电路互相结合起来,形成整体的控制,有效的克服了它们的缺点而发挥了它们的优势。
本文详细阐述了该系统中PLC(西门子)直接控制步进电机的实现方法、系统的各部件的组成、各部件的连接情况。
引言步进电动机是将控制脉冲信号变换成角位移或直线位移的一种特殊电动机,因其控制灵活、性能好、运行可靠、误差不会长期累积,适用于数字加工设备、自动生产线、自动控制仪表、计算机及办公自动化设备甚至家用电器中。
为了实现步进电机的简易运动控制,一般采用PLC控制驱动器驱动步进电机,实现步进电机的速度和位置定位控制。
1 系统要求此实验控制系统由常州市巨力精密电机公司生产的PM25S-024-11型永磁式步进电机、西门子S7-200系列CPU226CN型PLC、控制按钮、开关等组成。
系统要求:正转/反转开关可以控制步进电机的正反转;分别选定速度档位N1、N2和N3,将启动/停止开关置为“启动”时,电机以不同速度运行;选定S档,进入手动单步方式,将启动/停止开关置为“启动”时,每按一下单步按钮,电机进一步。
2 系统硬件本系统采用软件驱动,大量工作由软件完成。
硬件电路较为简单。
步进电机是一种将电脉冲转化为角位移的执行机构。
当PLC发送一个脉冲信号到驱动器,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行。
可以通过控制PLC发送脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制PLC发送脉冲的频率来控制电机转动的速度和加速度,从而达到有效控制的目的,此系统采用开环控制。
PLC第五章解读
【例2】运料小车自动往返运动控制
⑴ 分析工艺过程,明确控制要求
装料(停20s) SQ1
左行
右行
卸料(停10s) SQ2
运料小车在左端(由行程开关SQ1限位)装料,右 端(由行程开关SQ2限位)卸料,控制要求:
运料小车起动后先向左行,到左端停下装料
20s后装料结束,开始右行,到右端停下卸料 10s后卸料完毕,又开始左行
10000 00001 00002 00002 00003 00001 00003
32
黄灯闪烁的状态表和逻辑表达式
A B C F2
1
0
0
1
0
0
1
1
0
0
1
1
F 2 ABC ABC ABC
10001 00001 00002 00003 00001 00002 00003 00001 00002 00003
程序输入到PLC后即可进行模拟调试,在各 指定输入端输入信号,观察输出指示灯的状态, 并借助编程工具联机调试
24
§3 逻辑设计法
工业控制中常用的继电器、接触器的触点只 有两种逻辑状态,吸合或断开,因此,可用逻 辑代数设计电器控制线路 PLC的早期应用就是替代继电器控制系统,因 此用逻辑设计方法同样也适用于PLC应用程序的 设计 当一个逻辑函数用逻辑变量的基本运算式表 达出来后,实现这个逻辑函数的梯形图也就确 定了
25
函数和运算式
梯形图 X1 X2 X1
指令助记符 LD AND OUT LD OR OUT X1 X2 M1 X1 X2 M2
基本逻辑 函数和运 算式与梯 形图、指 令助记符 的对应关 系
逻辑“与” fM1=X1·X2 逻辑“或” fM2=X1+X2 逻辑“非” fM3=X1 “或/与”运算式 fY1=(X1+X2)·X3·X4
plc控制步进电机工作原理
plc控制步进电机工作原理PLC(Programmable Logic Controller)是一种特殊的计算机控制设备,用于自动化系统中对机械或生产设备进行控制。
步进电机是一种常用的电动执行器,其工作取决于外部控制信号和内部的步进电机驱动器。
PLC控制步进电机的工作原理可以分为以下几个步骤:1.PLC输入信号:PLC通过输入模块接收来自传感器或开关的信号,如按钮的状态、光电传感器的输出等。
这些输入信号将被用作步进电机的控制信号。
2.PLC程序:PLC程序是预先编写的软件代码,用于处理输入信号并生成相应的输出信号。
在PLC程序中,可以使用逻辑运算、计数器、定时器等功能块来处理输入信号和生成输出信号。
3.步进电机驱动器:PLC输出信号将通过步进电机驱动器来控制步进电机的运动。
步进电机驱动器是一种专门设计用于驱动步进电机的电子设备,它接收PLC输出信号并将其转换为适合步进电机的控制信号。
4.步进电机运动控制:步进电机驱动器将PLC输出信号转换为适合步进电机的控制信号后,将其发送给步进电机。
步进电机根据接收到的控制信号执行相应的步进运动。
5.输出信号反馈:在步进电机运动期间,PLC可以通过输出模块接收来自步进电机的反馈信号,如位置信息、传感器状态等。
这些反馈信号可以用于进一步的控制决策或监测步进电机运动的状态。
总体而言,PLC控制步进电机的工作原理是将输入信号经过PLC程序处理后生成输出信号,输出信号经过步进电机驱动器转换为步进电机的控制信号,步进电机根据接收到的控制信号执行相应的步进运动,从而实现对步进电机的精确控制。
PLC控制步进电机的工作原理可以更加具体地描述如下:1.从PLC输入模块接收信号:PLC通过输入模块接收来自传感器或开关的信号,如按钮的状态、光电传感器的输出等。
这些输入信号将作为步进电机的控制信号。
2.PLC程序处理输入信号:PLC程序中的逻辑运算、计数器、定时器等功能块将处理输入信号,并根据处理结果生成相应的输出信号,用于步进电机的控制。
PLC实现步进电机正反转和调速控制
PLC实现步进电机正反转和调速控制PLC(可编程逻辑控制器)是一种专门用于工业自动化控制系统的计算机控制设备。
它可以实现对多种设备和机器的控制,包括步进电机。
步进电机是一种通过步进角度来控制转动的电机,其转动可以精确地控制在每个步进角度停留一段时间。
步进电机的正反转和调速控制是实现工业自动化过程中常用的功能,PLC可以很好地实现这些控制。
一、步进电机的正反转控制步进电机的正反转控制是通过控制步进电机的相序来实现的。
步进电机有多种相序方式,常见的包括正向旋转、逆向旋转、双向旋转等。
PLC 可以通过控制步进电机的相序开关来实现步进电机的正反转。
在PLC中,可以使用PLC的输出口来控制步进电机的相序开关。
通过将输出口与步进电机的控制线路连接,可以控制相序开关的状态,从而控制步进电机的正反转。
例如,将PLC的一个输出口连接到步进电机的CW (Clockwise)输入线路,另一个输出口连接到步进电机的CCW(Counter Clockwise)输入线路,可以通过控制这两个输出口的状态来实现步进电机的正反转。
二、步进电机的调速控制步进电机的调速控制是通过控制步进电机的脉冲频率来实现的。
步进电机的转速与脉冲频率成正比,脉冲频率越高,步进电机的转速越快。
因此,通过控制PLC输出口给步进电机发送的脉冲频率,可以实现步进电机的调速控制。
在PLC中,可以使用定时器模块来控制步进电机的脉冲频率。
定时器模块可以通过设定计时器的定时时间和周期,来控制输出口的脉冲频率。
通过控制定时器的定时时间,可以控制步进电机每个步进角度的停留时间,从而控制步进电机的转速。
除了定时器模块,PLC还可以使用计数器模块来实现步进电机的调速控制。
计数器模块可以通过设定计数器的初始值和计数步长,来控制输出口的脉冲频率。
通过控制计数器的初始值和计数步长,可以控制步进电机每个步进角度的停留时间,从而实现步进电机的转速控制。
三、步进电机正反转和调速控制实例以下是一个使用PLC实现步进电机正反转和调速控制的实例。
基于PLC的步进电机运动控制系统设计
机电工程系基于PLC的步进电机运动控制系统设计专业:测控技术与仪器指导教师:xxx姓名: xxx _______________(2011年5月9日)目录一、步进电机工作原理 (1)1。
步进电机简介 (1)2。
步进电机的运转原理及结构 (1)3。
旋转 (1)4。
步进电动机的特征 (2)1)运转需要的三要素:控制器、驱动器、步进电动机 (2)2)运转量与脉冲数的比例关系 (2)3)运转速度与脉冲速度的比例关系 (2)二、西门子S7-200 CPU 224 XP CN (2)三、三相异步电动机DF3A驱动器 (3)1。
产品特点 (3)2。
主要技术参数 (3)四、PLC与步进电机驱动器接口原理图 (5)五、PLC控制实例的流程图及梯形图 (5)1.控制要求 (5)2。
流程图 (5)3.梯形图 (6)六、参考文献 (6)七、控制系统设计总结 (6)基于PLC的步进电机运动控制系统设计一、步进电机工作原理1.步进电机简介步进电机是一种将电脉冲转化为角位移的执行机构。
通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;也可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单2.步进电机的运转原理及结构电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。
0、1/3て、2/3て,即A与齿1相对齐,B与齿2向右错开1/3て,C与齿3向右错开2/3て,A’与齿5相对齐,(A'就是A,齿5就是齿1)3.旋转如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力,以下均同)。