基于PLC的水泵试验台电动阀门PI控制的实现
基于PLC的水泵测试控制系统设计
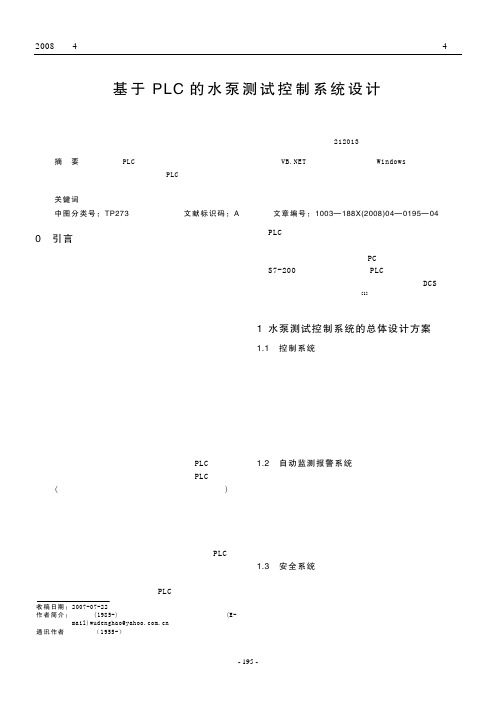
( 如 电 压 、电 流 、功 率 、频 率 和 进 出 口 压 力 等 )。因 此,其性能的好坏直接影响信号测量的精度和可靠 性。图 5 是该系统的测量电路原理图。
V V3
V V1
V V2
11ZJ 11ZJ
L1
22ZJ 22ZJ V* I *
1HL
11ZJ
L1 2HL
11ZJ 11ZJ
L1
2 2ZJ
水泵测试实验台系统plc电源键盘输入声音报警通信通道模拟执行部件传感器非电信号模拟电信号弹开关量输入天关量输出电网压力传感器电机plccpu电压电流频率绕组温度相位差启动停机转速调节进口压力出口压力电压电流频率功率软启动装置160kva800kvammc1c2c3c4k1k2k3kl1l2l3图4水泵测试过程控制系统主控制电路原理图2008年4月农机化研究第4期197232测量电路设计测量电路是水泵测试系统关键部分其功能是负责测量水泵与电机的各种信号通过各种测量仪器和传感器采集水泵与电机运行的各种关键信号量如电压电流功率频率和进出口压力等
安全系统的任务主要是针对水泵在测试运行过 程中发生的严重漏电现象,以及由于某些异常或是 人为因素而引起的电机反转,致使水泵出现倒吸的 严重故障,能适时地产生保护性动作,避免整个测 试系统的崩溃。
- 195 -
2008 年 4 月
农机化研究
第4期
水泵测试控制系统的结构如图 1 所示。它包含 了自动控制系统应具备的各项功能,由总体控制逻 辑把它们有机组织在一起,各项功能相互独立又相 互联系,共同完成水泵测试的自动控制。
监控模块就是对系统各个部分的状态进行监 控。当系统发生异常或出错时,及时报警并采取相
过程控制模块 D/A
监控模块
基于PLC的水泵试验台电动阀门PI控制的实现

第 2 卷 第 4期 5
20 07年 7月
排
灌
机
械
Vo . 5 No. 12 4
D an g a d ria in Ma h n r r ia e n Ir t c ie y g o
J l 0 7 u y2 0
基 于 P C的水 泵试 验 台 电动 阀 门 P 控 制 的实 现 L I
js e t fh I aa tr i w ihteotu f I eua rspo o inlotei p ro edva ut n eP rme ,n hc up t glt rpro a t h o t ei m ot p e h oP r oi t m t fh —
泵试验 的控 制 、 数据 采集 和处 理 。试验 表 明 ,I 制 方 法 对 水 泵试 验 中流 量 的调 节具 有 较好 的稳 P控
定 性 和 动 态特台 ; I 制 ; 数 自整 定 ; 量调 节 L P控 参 流
中图分类 号 : P 7 .4 T 23 2 文 献标 识码 :A 文章 编 号 :10 6 5 ( 0 7 0 0 5 0 0 5— 2 4 2 0 )4— 0 0— 4
t n,a d i lo p o o in lt h e i t n tme t h n e r 1 Th o to t o lmi ae h i o n s a s r p r o a o t e d vai i o t e i tg a . t o e PIc n rlmeh d ei n t s te
析并向 P C发 出指令 ,L L P C采用 P 控制方法, I 通过 P 控制 的参数设定及 自整定。根据 P 调节的 I I 输 出与 输入 的偏 差成 正 比 , 与偏 差对 时 间的积 分成 正 比 , 除 了控 制 过程 中产 生 的静 差 , 还 消 实现 了
基于PLC和变频器的阀门水压试验机自动控制系统设计

基于PLC和变频器的阀门水压试验机自动控制系统设计付德永;陈军;李杰【摘要】针对常规阀门水压试验机控制精度差、对系统冲击大的缺点,基于PLC和变频器设计了阀门水压自动控制系统.重点介绍了控制系统的组成、设备连接和控制流程.通过使用,该系统控制精度高,升压平稳,能满足不同用户的需求.【期刊名称】《承德石油高等专科学校学报》【年(卷),期】2015(017)001【总页数】4页(P30-33)【关键词】PLC;变频器;水压试验;自动控制系统【作者】付德永;陈军;李杰【作者单位】承德石油高等专科学校热能工程系,河北承德067000;承德石油高等专科学校热能工程系,河北承德067000;承德石油高等专科学校热能工程系,河北承德067000【正文语种】中文【中图分类】TH87阀门水压试验机是阀门专业水压耐压、密封性检测设备,用于新生产阀门和维修后阀门的性能测试。
传统的阀门水压试验机通常采用手动控制升压方式,增压过程曲线呈线性,冲击性较大,试验压力不易达到控制精度的要求,易出现欠压或过压现象,使试验准确度降低,甚至试验失败[1]。
对阀门水压试验机采用PLC和变频器进行升压和保压过程控制,可以提高响应速度,提高控制精度,减小系统的冲击性,达到满意的控制效果[2]。
1 阀门水压试验机工作原理阀门水压试验机系统组成如图1所示。
系统采用一台交流液压泵作为升压动力源,当试验阀门安装就位后,启动增压泵;当压力达到试验压力时,停泵保压;达到试验时间后,打开电磁阀泄压,试验结束。
该系统增压速度快,适用于多型号、大口径阀门水压试验,但手动控制时试验效果不够理想。
2 控制系统的组成为了保证增压过程的平稳性和准确性,可以采用基于PLC和变频器控制增压泵的控制方案。
控制系统的组成如图2所示,其控制思路是:通过压力传感器测量试验台待测试阀门的实时水压,将压力信号转换为4~20 mA的电流信号输入PLC;PLC依据设定水压值与实时水压值的大小,计算出增压速度信号输出给变频器,通过变频器改变输出频率,进而改变增压泵转速实现平缓增压;当压力达到设定压力时,自动停机保压;保压时间到,自动打开泄压电磁阀泄压,试验结束。
基于PLC的抽水泵控制

毕业设计(论文)(成教)题目:基于PLC的抽水泵控制系统设计院(系):机电工程学院专业:机械制造与自动化姓名:学号:72指导教师:二〇一四年一月二十日毕业设计(论文)任务书毕业设计(论文)进度计划表日期工作内容执行情况指导教师签字2013.11.28-2013.12.20查找资料,选题2013.12.22-2014.1.31完成论文的初稿2014.2.1-2014.3.15完成论文二稿的写作2014.3.16-2014.4.5完成论文的终稿及格式修改2014.4.6-2014.4.20定稿,打印论文,做好评阅的准备2014.4.21-2014.4.25论文评阅教师对进度计划实施情况总评签名年月日本表作评定学生平时成绩的依据之一。
毕业设计(论文)中期检查记录表学生填写毕业设计(论文)题目:基于PLC的抽水泵控制系统设计学生姓名:学号:08专业:机械制造与自动化指导教师姓名:职称:检查教师填写毕业设计(论文)题目工作量饱满一般不够毕业设计(论文)题目难度大适中不够毕业设计(论文)题目涉及知识点丰富比较丰富较少毕业设计(论文)题目价值很有价值一般价值不大学生是否按计划进度独立完成工作任务学生毕业设计(论文)工作进度填写情况指导次数学生工作态度认真一般较差其他检查内容:存在问题及采取措施:检查教师签字:年月日院(系)意见(加盖公章):年月日摘要基于PLC的矿井排水监控系统现场控制部分是为了煤矿安全和正常生产而进行的各种有关参数或状态的集中监测,并对有关环节加以控制,是保护、采掘、运输、通风、排水等主要生产环节安全运行的重要设施。
本文主要介绍了一种基于西门子S7-300PLC的矿井下排水泵自动控制系统的设计方法和思路。
西门子S7-300型PLC 给出了矿井下排水系统的传感器及执行机构的配置方案、通信网络结构和系统功能设计,实现了对水泵进行自动控制,水位监测、自动启停水泵、故障自诊断等功能;同时也实现了水泵运行的合理调度,提高了设备利用率,达到了节能增效的效果,并能与上位机通讯,实现远程控制和在线监测,提高了煤矿自动化水平和安全性。
plc控制阀门程序实例

plc控制阀门程序实例PLC(Programmable Logic Controller,可编程逻辑控制器)是一种数字电子设备,可用于自动控制各种机器和工业过程。
PLC控制阀门程序是指使用PLC来控制阀门的开关动作,以实现特定的工业过程或系统的自动化控制。
本文将介绍一个PLC控制阀门的程序实例,用于清晰地演示PLC在工业控制中的应用。
PLC控制阀门程序的基本原理是:通过PLC输入信号感知要控制的过程参数,然后通过PLC的逻辑程序判断并产生输出信号,控制气动执行机构(例如气动阀门)的开关动作,最终实现对阀门的控制。
首先,我们需要准备以下设备和材料:1. PLC主机:PLC主机是整个控制系统的核心部分,负责控制程序的运行和信号的输入输出。
2.输入模块:用于接收来自传感器等输入设备的信号。
3.输出模块:用于输出控制信号给执行机构(如气动阀门)。
4.感应器:用于检测阀门位置、流量等过程参数。
5.执行机构:如气动阀门,负责控制介质的流动。
接下来,我们可以开始编写程序。
第一步是确定输入和输出信号的引脚分配。
例如,我们可以将阀门状态的输入信号连接到X0.0引脚,将控制信号的输出连接到Y0.0引脚。
第二步是编写PLC程序。
PLC程序可以通过各种编程语言(如Ladder Diagram,结构化文本等)来实现。
这里我们以Ladder Diagram为例。
程序的主要逻辑如下:1.开始:首先,我们需要在程序开始处设置PLC的初始状态和初始化参数。
2.读取输入信号:接下来,我们需要通过输入模块读取来自感应器的阀门状态信号,例如,读取X0.0引脚的值并将其保存到一个变量中。
3.执行控制逻辑:根据输入信号的值,我们可以编写控制逻辑来判断阀门的状态。
例如,如果阀门关闭,则设置输出信号Y0.0为1,表示打开阀门;如果阀门打开,则设置输出信号Y0.0为0,表示关闭阀门。
4.输出控制信号:根据控制逻辑的结果,通过输出模块发送相应的控制信号给执行机构,例如,将Y0.0引脚设置为1,表示打开气动阀门。
基于PLC的闭环控制系统PID控制器的实现[1]
![基于PLC的闭环控制系统PID控制器的实现[1]](https://img.taocdn.com/s3/m/545845370b4c2e3f5727634c.png)
【20】第31卷第4期2009-04基于PLC 的闭环控制系统PID 控制器的实现The realization of PID controller in closed-loop control system based on PLC 任俊杰,李永霞,李 媛,李红星REN Jun-jie , LI Yong-xia, LI Yuan, LI Hong-xing(北京联合大学 自动化学院,北京100101)摘 要:介绍了PLC实现PID控制的几种方法。
以S7-300PLC为例,说明PID控制器的组成原理、PID控制功能块的算法原理、PID控制功能块的结构和主要参数及控制功能的实现方法。
给出了水箱水位PID控制的应用实例。
应用PID程序块来进行PLC的PID控制,方法简单实用。
不足之处为所采用的PID算法是固定的。
如果希望采用其他改进型PID算法,还需要用户自己编程实现。
关键词:PLC;闭环控制;PID中图分类号:TM571 文献标识码:B 文章编号:1009-0134(2009)04-0020-03收稿日期:2008-11-17基金项目:北京教委科技发展计划项目(km200611417007); 国家自然科学基金项目(60773157 )作者简介:任俊杰(1972-),女,河北省石家庄市人,讲师,工学硕士,主要从事自动控制、控制工程的教学与研究。
0 引言在工业生产过程控制中,常需要用闭环控制方式来实现温度、液位、压力、流量等模拟量控制。
因为PID(比例、积分、微分)调节不需要精确的控制系统数学模型而且易于实现,所以模拟量的PID调节是常见的一种闭环控制方式,工程上易于实现。
积分作用可以消除系统的静差,微分作用有助于减小超调,克服震荡。
比例、积分、微分三者有效地结合可以满足不同的控制要求。
PLC作为一种新型的工业控制装置,在工业控制、生产生活的诸多领域得到了越来越广泛的应用。
利用PLC实现对模拟量PID的闭环控制,具有用户使用方便、可靠性高、抗干扰能力强等优点。
基于PLC和触摸屏的自动阀门测试控制系统设计

自动 阀 门 的 阀 体 部 分 灌 人 工 艺 介 质 , 两 端 封
闭, 浸在测 试 容器 中的 导热 油 里 , 控 制 系统 在测 试
容 器 中模 拟 实际工 况 , 控 制导 热油 温度 和 自动 阀门 开 闭设 定次 数 , 开 闭 时间 间隔和 开闭次 数要 结合 实
Yu Me n g ,Z o u Zh i y u n,Z h a o Da n d a n,De n g De r u,Ch e n L i g u a n g
( Re s e a r c h I n s t i t u t e o f C h e mi c a l De f e n s e ,Be i i i n g ,1 0 2 2 0 5 ,Ch i n a )
作, 显示并改变 P I C内部状态 , 完 成 阀 门 开 关 控 制、 工作 状态 的监 视及测 试装 置 温度 的控 制 。测试 装 置 的架 构 如 图 1所示 。
( 如 电动球 阀和 电磁 阀) 已经 广泛 替代 了手 动 阀门 ,
设 计一 套 针对 自动 阀 门的测 试 控 制 系 统来 验 证 阀 门 的使用 性能 十分 必要 。
际 操作 经验 设定 。测试 完成 后 , 进 行球 阀金 属表 层
腐 蚀 电镜检 测 和 阀门 密 封性 能 检 测 _ 2 ] 。密 封 性 能
检 测在 测试 容器 中进 行 , 将 压缩 空气通 过 管路通 入 自动 阀 门的一 端 , 控 制 自动 阀 门的 开 闭 , 检测 导 热 油液 体在 阀 门开闭动 作 时是否 有气 泡 出现 , 进 而验
Ke y wo r d s :a u t o ma t i c v a l v e ;s y s t e m d e s i g n ;PI C;t o u c h s c r e e n
基于PLC的抽水泵站自动控制系统设计教程

兰州理工大学毕业设计
பைடு நூலகம்目录
第一章 绪 论 ........................................................................................................................ 1 1.1 课题背景及意义 ...................................................................................................... 1 1.2 课题内容及任务 ...................................................................................................... 1 1.3 国内外研究的现状 .................................................................................................. 2 1.3.1 国外研究的现状 ............................................. 2 1.3.2 国内研究的现状 ............................................. 2
第四章 PLC 控制系统设计................................................................................................... 22 4.1 PLC 控制系统的设计原则、内容和步骤............................................................. 22 4.1.1 PLC 控制系统的设计原则 .................................... 22 4.1.2 PLC 控制系统的基本内容 .................................... 22 4.1.3 PLC 控制系统的设计步骤 .................................... 22 4.2 PLC 硬件配置及模块选择..................................................................................... 23 4.2.1 PLC 简介 .................................................. 23 4.2.2 PLC 的选型 ................................................ 26 4.2.3 PLC 的硬件配置选型 ........................................ 29 4.2.4 PLC 的 I/O 接线图 .......................................... 31
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图 08 联机工作方式
$" 电动阀门控制方法
图 !8 $%& 与 $& 机的通讯
电动阀门的自动控制不仅需要有较多的开关量 控制, 还需要实现闭环控制。考虑到控制量是流量,
[ < " 6] 。 $’ 控制的最大优点是减小 这里采用 $’ 控制
!# !# $" 电动阀门装置 本水泵实验台选用的是 9:(!; " !<& 型电动闸 阀。它的阀门闸板采用楔式结构, 可 #<1= 任意位置 上安装, 不受安装现场条件限制, 可远距离操作。 $%& 对电动闸阀的控制, 是对电动闸阀的电动 执行机构进行控制。 9:(!; " !<& 型电动闸阀选用 的是 9>9 型电动执行机构, 它由可逆电动机、 减速 器、 推力机构、 机械限位组件、 手轮、 弹性连轴器、 反 馈螺旋电位器、 行程限位开关、 电流信号变换器等组 成。$%& 通过控制可逆电动机的正反转来控制电动 闸阀开度的大小。 !# !# %" 工控计算机 万方数据 工控计算机是试验台测量分析系统的中心, 负
收稿日期: !$$% D $" D $W 基金项目:江苏省自然科学基金资助项目 ( XY!$$##$E ) 作者简介:尤亚峰 ( ?ZW? D ) , 男, 江苏常州人, 硕士研究生, 主要从事水泵自动测控方面的研究。 万方数据 马新华 ( ?Z"E D ) , 男, 江苏金坛人, 副研究员, 主要从事流体机械的理论、 设计方法和试验研究。
图 ;" 继电反馈系统框图
继电反馈系统的框图 ; 中 , ( -) 是过程的传递 $ 是偏差, %是 函数, . 是控制器输出, . @MI 是设定值, 操作的输入。 因为相位延时是 & !, 所以产生了一个周期是 + J 的极限振荡。因此, 从继电反馈测试得到的极限 频率是
[
$
*
]
近似地认为是
!J &
摘& 要:阀门控制是水泵试验台自动控制系统的一个关键。采用工业控制计算机, 根据专家系统 确定最优工况的各试验流量, 通过泵参数测量仪接收传感器的数据, 对采集的相应数据进行处理分 析并向 <=> 发出指令, <=> 采用 </ 控制方法, 通过 </ 控制的参数设定及自整定。根据 </ 调节的 输出与输入的偏差成正比, 还与偏差对时间的积分成正比, 消除了控制过程中产生的静差, 实现了 阀门闭环调节的精确控制。设计了监控软件、 <=> 软件、 <=> 与工控计算机的通信软件, 实现了水 泵试验的控制、 数据采集和处理。试验表明, </ 控制方法对水泵试验中流量的调节具有较好的稳 定性和动态特性。 关键词:<=> ;水泵试验台;</ 控制;参数自整定;流量调节 & & 中图分类号:A<!%@ B 8 !#& & 文献标识码:C& & 文章编号: ?$$" D E!"# ( !$$% ) $# D $$"$ D $#
,! +J
式中 ’ # 为比例增益;) $ 为积分时间常数。 !" !$ %& 控制回路的参数设定及自整定 本系统采用的 *+ & ,(( #-. 带有专门的 #$/ 指 令, 并具有 #$/ 参数自整定功能, 可以对 #$ 控制回 路的参数设定及自整定。通过 *01#+ & 23456 7 8$9 :;< ( 编程软件及调用其中的 #$/ 整定控制面板来 实现。
:60’-#,’:A4- 31+0(17 1H -7-30(*3 L)7L- *G *OP1(0)+0 01 04- );01Q31+0(17 G5G0-O 1H 04- P;OP 0-G0QR-.8 A431+0(17 G5G0-O 1H -7-30(*3 L)7L- ).1P0G *+.;G0(*)7 31OP;0-( ,S4*34 .-0-(O*+-G 04- 1P0*O)7 1P-()0*+, 31+.*Q 0*1+G 1H 04- 0-G0 H7;T )331(.*+, 01 -TP-(0 G5G0-O8 U*04 G-+G1( .)0) (-3-*L-. H(1O 04- P;OP P)()O-0-( O-)G;(*+, *+G0(;O-+0 ,04- *+.;G0(*)7 31OP;0-( )+)75G-G )3V;*G*0*1+ 1H 04- 31((-GP1+.*+, .)0) )+. G-+.G *+G0(;30*1+G 01 04- <=>8 /+ 04- <=> ,04- </ 31+0(17 O-041. *G ).1P0-.,S*04 04- -+)30O-+0 )+. G-7HQ).Q N;G0O-+0 1H 04- </ P)()O-0-(, *+ S4*34 04- 1;0P;0 1H </ (-,;7)01( *G P(1P1(0*1+)7 01 04- *OP1(0 1H 04- .-L*)Q 0*1+,)+. *G )7G1 P(1P1(0*1+)7 01 04- .-L*)0*1+ 0*O- 01 04- *+0-,()78 A4- </ 31+0(17 O-041. -7*O*+)0-G 04G0)0*3 -((1( 1H 04- 31+0(17 P(13-GG )+. )34*-L-G ) 371G-.Q711P ).N;G0O-+0 1H 04- P(-3*G- L)7L- 31+0(178 A4O1+*01(*+, G1H0S)(- ,<=> G1H0S)(-,04- 31OO;+*3)0*1+ G1H0S)(- 1H <=> )+. *+.;G0(*)7 31OP;0-( )(- .-Q G*,+-.8 C+. 04- 31+0(17,.)0) )3V;*G*0*1+ )+. P(13-GG*+, 1H P;OP 0-G0 )(- )34*-L-.8 A4- -TP-(*O-+0 *+.*Q 3)0-G 04)0 04- </ 31+0(17 O-041. 4)G H)*(75 ,11. G0)R*7*05 )+. .5+)O*3 R-4)L*1( 01 04- H7;T ).N;G0O-+0 *+ S)0-( P;OP 0-G0*+,8 ;"< =(-70:<=> ;P;OP 0-G0QR-.;</ 31+0(17;P)()O-0-( G-7HQ).N;G0O-+0;H7;T ).N;G0O-+0 & & 进行水泵负载试验和汽蚀试验时需要对试验流 量进行调节, 而水泵试验中流量调节, 是通过对电动 阀门的开度大小调节来实现的。现有的试验台中阀 门控制大多采用手动调节, 这不仅影响了试验的准
!"#$%&#’%() (* ’+" "$",’-%, .#$."/0 12 ,()’-($ %) 3453 ’"0’ D 6"7 6#0"7 () 189
!"# !$%&’() ,*+ ,-(%./$ , 01 2-$3%4/(, ,-$3 5$-%./$
( A-34+*3)7 )+. F-G-)(34 >-+0-( 1H I7;*. 2)34*+-(5 J+,*+--(*+,, :*)+,G; K+*L-(G*05, M4-+N*)+,,:*)+,G; !?!$?@ , >4*+))
第 !" 卷 第 # 期 !$$% 年 % 月
& & &
&
排& 灌& 机& 械 ’()*+),- )+. /((*,)0*1+ 2)34*+-(5
& & &
&
6178 !" 918 # :;75 !$$%
基于 <=> 的水泵试验台电动阀门 </ 控制的实现
尤亚峰,马新华,李乔军,肖开华
( 江苏大学 流体机械工程技术研究中心, 江苏 镇江 !?!$?@ )
第 ( 期8 8 8 8 8 8 8 8 8 8 8 尤亚峰等:基于 $%& 的水泵试验台电动阀门 $’ 控制的实现
2!
确性, 而且在快速响应方面也无法满足测试的高精 度要求。现采用电动阀门, 通过计算机进行闭环控 制
[ ! " #]
责接收、 处理、 保存和显示泵参数测量仪传来的数 据, 并通过流量值与设定值的比较, 向 $%& 发出相 应的指令。工控计算机测量系统开发平台为: &? ? @A*BC+D <E 1 , 使用平台: F*-CGH. 0111 。
系统的稳态误差, 但在一定程度上增加了调节时间。 根据本试验台控制需要, 减少流量调节的稳态误差 是至关重要的, 对调节时间的要求有一定的宽裕。 所以 $’ 控制可很好地满足对电动阀门的控制要求。 在选择反馈信号时, 考虑采用阀门开度或流量 信号, 这两个信号都是系统需要采集的。阀门开度 信号虽然在快速响应上更有优势, 但不能确定相应 的流量值, 无法实现模糊控制, 在这里采用流量信 号。其中 $’ 控制器是通过 )/ " 011 $%& 调用程序 模块实现的, 其控制原理图如图 # 所示。 阀门通过控制台上的开关控制, 有手动和自动