新型回转机构,回转驱动装置产品
IMT 系列智能型多回转阀门电动装置 使用说明书
(使用产品前请详细阅读本说明书)SM-22IMT系列智能型多回转阀门电动装置IMTEx系列隔爆智能型多回转阀门电动装置使 用 说 明 书TET通二天天津百利二通机械有限公司(原天津市第二通用机械厂)目 录第一部分 机械构造与安装部分 (1)1.概述2.基本技术参数3.主要结构4.与阀门的连接5.润滑6.电气接线7.注意事项第二部分 设定与调试部分 (4)1.电动装置的操作方法2.显示状态说明3.电动装置的调试4.电动装置功能、参数设置5.控制接线方式第三部分 IMT-04~4Ex 隔爆智能型产品附加说明 (15)1.概述2.使用及维护注意事项3.接线盒的出线部位4.装置的接线程序5.其它天二通T ET第一部分 机械构造与安装部分1.概述IMT 系列非侵入式智能型多回转阀门电动装置(以下简称电动装置)用于驱动控制闸阀、截止阀、隔膜阀等阀瓣工作中直线运动的多回转阀门或类似机构。
IMT 系列电动装置也可与减速器组合,形成组合式多回转电动装置或部分回转电动装置。
本《使用说明书》适用IMT 系列普通型电动装置和IMTEx 防爆型电动装置,如有其它特殊功能时将提供相应的附加说明。
2.基本技术参数2.1动力电源:380V、50Hz 三相三线制正弦交流电(特殊电源订货时提出) 2.2外壳防护等级:IMT-04~2、IMT-04~2Ex : IP68 IMT-3~4、IMT-3~4Ex :IP67 2.3使用环境温度:-20℃~+70℃(隔爆型-20℃~+60℃) 2.4环境相对湿度:≤90%(25℃时) 2.5海拔高度:≤1000m2.6短时工作:时间定额为 10、15、30min(根据电动机实际负载) 2.7无强烈振动工况2.8工作环境不含强腐蚀性介质和爆炸性混合物气体2.9设定方式:现场磁旋钮开关、遥控器(需要遥控器订货时提出)3.主要结构电动装置由以下主要部件构成:3.1阀门专用电动机:鼠笼式三相异步电动机,适合阀门的载荷特性和使用工况,启动转矩大,转动惯量小,短时工作制。
新型焊接变位机的研制
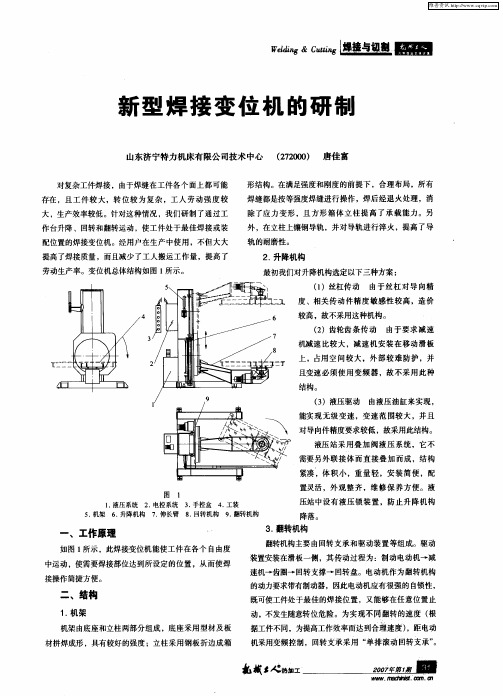
对复杂工件焊接 ,由于焊缝 在工件各个面上 都可能 存在 ,且 工 件较 大 ,转 位较 为复 杂 ,工 人 劳动 强度 较
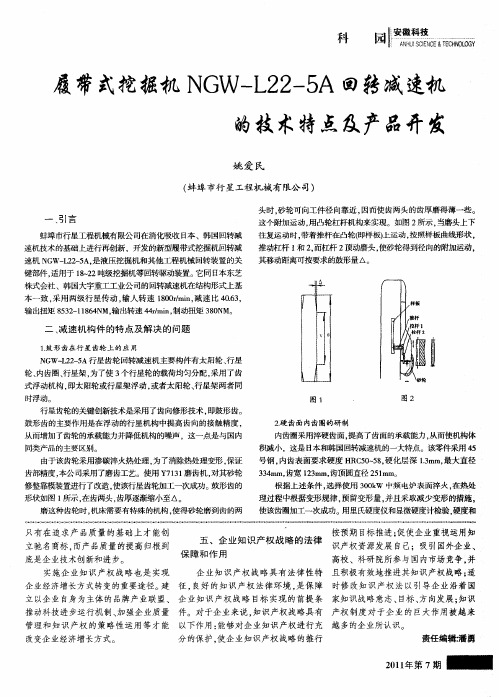
大, 生产效率较低。针对这 种情况 ,我们研制 了通过工 作台升降 、回转和翻转运动 ,使工件处于最佳 焊接或装 配位置的焊接变位机 。经用户在生产 中使用 ,不但大 大 提高了焊接 质量 , 而且减少 了工人搬运 工作量 ,提高 了 劳动生产率。变位机 总体结构如图 1 所示。
恒转矩 、调速平稳 、无转矩 脉动等特性 ;控制信 号采用
5 升降安全机构 .
升降机构 由液压驱动 ,为防止 升降油缸 内泄 、 漏油 及油管的破裂等一 系列 因素而造成 升降机构突然下 降的 安全 隐患 ,我们另增加 了安全锁机构 ,如图 2 示。 所
1 2 3 4 5
据工件不同 , 为提高工作效率而达到合理速度 ) 电动 ,距 机采用变频控制 ,回转支承采用 “ 单排 滚动 回转支 承” 。
缸 l 加 板 热工
wH . w 甚dl_ a . n . c
z 丝 一
维普资讯
& c
r
该回转支承具有结构合理 、 刚性好、寿命长等优点。
9 控制箱 .
控制箱与主机安装在一起 ,手控盒与 电控 箱之间采 用 电缆相关联 ,以使操作空间较大 。电控箱 面板上设有 电源提示灯 、正反转开关按钮及各个单 独调试按钮 , 既 能单独操作 ,又能实现半 自动和 自动动作 ,操作相对较
灵活 。主要技术参数如下 表所示 。
主要技 术参数表
簧力 的驱动下 ,活 塞驱动滑块 使塑 性材 料与齿 条压 紧 ,
lo Oo l 0 —l 3 N×30 6 O.5~2 5 2 . 15 . lo 0 1 0—2 0
双蜗杆回转驱动

双蜗杆回转驱动双蜗杆回转驱动定义双蜗杆回转驱动是一种全新的回转驱动产品,由外壳体、蜗轮套圈、蜗杆、马达等部件组成。
与单蜗杆回转驱动相比,双蜗杆回转驱动仍然具有模块化、安全性和简化主机设计的特点,与单蜗杆不同的是,在相同的外形尺寸前提下,双蜗杆回转驱动的结构更紧凑、载荷能力更佳、输出扭矩也远远超过了单蜗杆回转驱动。
双蜗杆回转驱动在设计方面舍弃了核心部件回转支承,通过外壳体与包含其之内的蜗轮在理论上形成双排空间交叉滚柱式的回转支承,壳体内通过两根蜗杆与蜗轮啮合以实现转动,以保证在实现较高承载能力的同时,也可产生较大的输出扭矩。
由于此种回转驱动的生产制造工艺极为复杂,行业内能生产此种特殊回转驱动的生厂商为数不多,国内仅有辽宁鞍山有此类特殊回转驱动的生产商。
双蜗杆回转驱动应用领域1.重型平板运输车与单蜗杆回转驱动相比,双蜗杆回转驱动更适用于较大吨位的重型平板运输车的转向装置,实践证明,当单蜗杆回转驱动使用于较大吨位的重型设备时,会产生抖动、噪音、壳体扭曲甚至于蜗杆断裂等现象,因此,此种特殊的回转驱动成为广大重型装备设计者所亲睐的配套产品。
2.重型吊装及高空作业领域在对载荷和扭矩极要求极高的应用领域中,单蜗杆回转驱动的优势正逐渐的丧失,双蜗杆回转驱动迎合了广大用户的需求,对恶劣工况及使用条件的适应性极其强大,尤其以重型吊装领域及重载高空作业领域,双蜗杆回转驱动与传统的回转支承配套使用,更使回转机构如虎添翼,在得到较大减速比的同时,也提供了高于传统设计几倍的输出扭矩。
3.重型门式起重设备传统的门式起重机多为轨道移动式,只能在有限的钢轨上做直线平行移动。
目前,一些对技术革新较为重视的企业,已经逐渐意识到打破传统的门式起重设备设计理念势在必行。
选用双蜗杆回转驱动作为转向系统的门式起设备,与以往的设计相比,在单位作业面积内,所需的起重设备比以往减少了75%,在降低作业成本与维护成本的同时,作业效率也大大的提高了。
回转机构
3)倾斜阻力矩 Mp:坡道倾斜引起
Mp = G×l×Sinγ×Sinφ+ Q×Rmax×Sinγ×Sinφ
= Mpmax×Sinφ
Mp 变化,当φ= 90°→ Mpmax
疲劳计算:
2020/9/17
M px
0
M
2 p
d
0.7M pmax
12
(2)电动机的选择及校验
1)计算回转静功率:
Nj
M eq nh
Rmax、无风,仅起升机构工作
2020/9/17 试验载荷:动载—1.10 PQ 、静载—1.25 PQ
7
3)载荷组合
水平载荷: H
H
2 X
HY2
垂直载荷:V Vi
倾复力矩: M
Mi
M
2 X
M
2 Y
考虑:臂架摆动平面、垂直臂架摆动平面
(3)配重的作用及确定原则
1)作用:
① 减少回转支承所受的倾覆力矩
港口起重机多采用 ②驱动部分在非回转部分上,最后一级大齿圈在回转部分上 2020/9/17 装卸船机、斗轮堆取料机、定柱式起重机、塔式起重机 9
(3)回转驱动装置的传动型式 1)卧式电机驱动
圆柱圆锥齿轮传动
蜗轮减速器传动
2)立式电机驱动
液压驱动
行星齿轮减速器传动 立式圆柱齿轮减速器传动
3.回转驱动装置计算
装卸类型起重机:变幅与回转同时起(制)动惯性力
安装类型起重机:运行与回转同时起(制)动惯性力
Rmax、αⅡ、PQ、PG回、PfⅡ、P齿Ⅰ
3)非工作状态最大载荷——静强度、静刚度和稳定性计算
按以下两种工况分别计算,取较大值:
① 最大风载荷工况
回转驱动在高空作业车回转机构中的应用
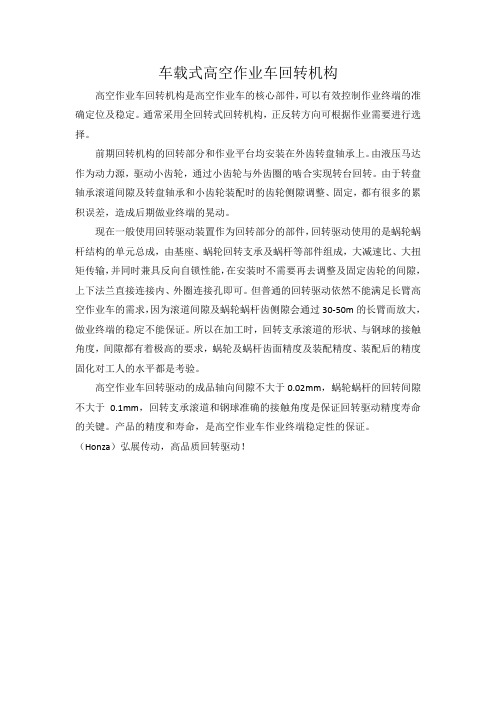
车载式高空作业车回转机构
高空作业车回转机构是高空作业车的核心部件,可以有效控制作业终端的准确定位及稳定。
通常采用全回转式回转机构,正反转方向可根据作业需要进行选择。
前期回转机构的回转部分和作业平台均安装在外齿转盘轴承上。
由液压马达作为动力源,驱动小齿轮,通过小齿轮与外齿圈的啮合实现转台回转。
由于转盘轴承滚道间隙及转盘轴承和小齿轮装配时的齿轮侧隙调整、固定,都有很多的累积误差,造成后期做业终端的晃动。
现在一般使用回转驱动装置作为回转部分的部件,回转驱动使用的是蜗轮蜗杆结构的单元总成,由基座、蜗轮回转支承及蜗杆等部件组成,大减速比、大扭矩传输,并同时兼具反向自锁性能,在安装时不需要再去调整及固定齿轮的间隙,上下法兰直接连接内、外圈连接孔即可。
但普通的回转驱动依然不能满足长臂高空作业车的需求,因为滚道间隙及蜗轮蜗杆齿侧隙会通过30-50m的长臂而放大,做业终端的稳定不能保证。
所以在加工时,回转支承滚道的形状、与钢球的接触角度,间隙都有着极高的要求,蜗轮及蜗杆齿面精度及装配精度、装配后的精度固化对工人的水平都是考验。
高空作业车回转驱动的成品轴向间隙不大于0.02mm,蜗轮蜗杆的回转间隙不大于0.1mm,回转支承滚道和钢球准确的接触角度是保证回转驱动精度寿命的关键。
产品的精度和寿命,是高空作业车作业终端稳定性的保证。
(Honza)弘展传动,高品质回转驱动!。
履带式挖掘机NGW-L22-5A回转减速机的技术特点及产品开发
本一致 , 采用两级行 星传动 , 输人转 速 10r i, 比 4. , 80/ n减速 m 03 6
同类产 品 的主要 区别 。
2 齿 面 内齿 圈的研 制 硬
内齿 圈采用淬硬齿面 , 提高了齿面的承载能力 。 从而使机构体 积减小,这是 日本和韩国回转减速机的一大特点。该零件采用 4 5 号钢 , 内齿表 面要求硬度 HR 5 ~ 8硬化层深 1 m 最大直径 C05 , . m, 3
立以企业 自身为主体 的品牌产 业联盟、 企业知识产权 战略 目标 实现 的前提条 家知识战略意志、 目标、 向发展 : 方 知识
推动科技进 步运行机制、 加强企业质量 件。对于企业来说 , 知识产权战略具有 产权制度对 于企 业的 巨大作用被越来 管理和知识产权 的策略性运用 等才能 以下 作 用 : 够对 企 业 知 识产 权 进 行充 越 多的企业所认识。 能 改变企业经济增长方式。
达到 日本东芝或韩国大宇的水平 。 其中, 有部分参数已经超过 日 本
责任编 辑 : 李丹 丹
_I ll
0年 7 2 1第 期 l
34 m, 3 m 齿宽 1 3 m, 2 m 齿顶圆直径 2 1 。 5mm
根 据 上述 条 件 , 择 使 用 30 W 中频 电炉 表面 淬 火 , 热处 选 0k 在
由于该齿轮采用渗碳淬火热处理 , 了消除热处理变形 , 为 保证 齿部精度, 本公司采用了磨齿工艺。使用 Y 1 1 7 3 磨齿机 , 对其砂轮 修整靠模装置进行了改造 。 使该行星齿轮加工一次成功。 鼓形齿的 形状如图 1 所示 , 在齿两头 , 齿厚逐渐缩小至 △。
回转式夹钳式取料手四种驱动方案
回转式夹钳式取料手四种驱动方案回转式夹钳式取料手是一种常见的自动化取料装置,用于工业生产中的物料搬运和加工过程。
它能够完成对物料的夹取、转动和放置等动作,实现高效、精确的取料操作。
回转式夹钳式取料手的驱动方案有四种:气动驱动、液压驱动、电动驱动和机械驱动。
一、气动驱动气动驱动是回转式夹钳式取料手常用的驱动方案之一。
它通过气动元件(如气缸、气源等)提供压缩空气驱动夹钳的开合和转动动作。
气动驱动具有结构简单、响应速度快、承载能力强的特点,适用于大部分工作环境。
然而,气动驱动也存在一些不足,如噪音大、能耗较高等问题。
二、液压驱动液压驱动是回转式夹钳式取料手的另一种常见驱动方案。
它通过液压元件(如液压缸、液压泵等)提供液体压力驱动夹钳的开合和转动动作。
液压驱动具有承载能力大、动作平稳、可控性好的特点,适用于对力和速度要求较高的场合。
但液压驱动也存在一些问题,如系统复杂、维护困难等。
三、电动驱动电动驱动是回转式夹钳式取料手的另一种常见驱动方案。
它通过电动机驱动夹钳的开合和转动动作。
电动驱动具有结构简单、启动方便、精度高的特点,适用于对精度要求较高的场合。
但电动驱动也存在一些问题,如占用空间大、噪音较大等。
四、机械驱动机械驱动是回转式夹钳式取料手的另一种驱动方案。
它通过机械传动机构(如曲柄连杆机构、齿轮传动等)实现夹钳的开合和转动动作。
机械驱动具有结构简单、可靠性高的特点,适用于对驱动精度要求不高的场合。
但机械驱动也存在一些问题,如传动效率低、响应速度慢等。
回转式夹钳式取料手的驱动方案有气动驱动、液压驱动、电动驱动和机械驱动四种。
不同的驱动方案适用于不同的工作环境和要求,工程师在选择时需根据实际情况进行合理选择。
同时,随着科技的不断进步,新型的驱动方案也在不断涌现,为回转式夹钳式取料手的发展带来了新的可能性。
我们期待未来的自动化取料装置能够更加高效、智能地为工业生产提供支持。
产品名称回转电动执行机构

产品名称回转电动执行机构1. 简介回转电动执行机构是一种电动执行机构,用于控制或驱动设备在水平或垂直方向上的旋转运动。
该机构具有高效、可靠、精确控制等特点,广泛应用于各个工业领域。
2. 结构和工作原理回转电动执行机构主要由电动机、减速器、转轴和控制系统等部分组成。
•电动机:回转电动执行机构使用电动机作为驱动源,常见的电动机有直流电动机和交流电动机。
•减速器:电动机的输出轴通过减速器连接到转轴上,减速器的作用是降低电动机的转速并增加输出扭矩。
•转轴:转轴是回转电动执行机构的核心部件,它与需要进行旋转运动的设备相连。
•控制系统:回转电动执行机构通常配备有控制系统,可以实现对转速、方向和位置的精确控制。
回转电动执行机构的工作原理如下:1.当电机运转时,通过减速器将电机的高速旋转转换为低速高扭矩的转轴运动。
2.控制系统接收操作者的指令,并将指令传递给电动机。
3.电动机依据控制系统的指令,以特定的速度和方向转动转轴。
4.转轴和设备相连,将旋转运动传递给设备。
3. 应用领域回转电动执行机构被广泛应用于各个工业领域,包括但不限于以下几个方面:3.1 自动化生产线回转电动执行机构常常用于自动化生产线上,用于控制工件在生产过程中的旋转运动。
它可以实现对工件的精确定位和角度调整,提高生产线的生产效率和质量。
3.2 机械设备回转电动执行机构可以应用于各种机械设备中,如机械臂、旋转平台等。
它可以控制设备在水平或垂直方向上的旋转运动,实现设备的多方向操作和精确定位。
3.3 包装与装配在包装与装配行业中,回转电动执行机构能够实现产品的旋转、翻转和定位等操作,提高包装和装配的效率和精度。
3.4 雷达和天线雷达和天线需要进行360度的旋转扫描,回转电动执行机构可以实现对雷达和天线的平稳旋转,并实时调整角度和方向。
4. 优势回转电动执行机构相比传统机械执行机构具有以下几个优势:•精确控制:回转电动执行机构可以通过调整电机的转速和方向来实现对旋转角度的精确控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
For more information, please contact with us as follows
如 有 任 何 疑 问,请 联 系 我 们Ph:+86-510-86366201 86366206 86366117 86366260
Fx:+86-510-86366200
Http://
E-mail: sales@ CUSTOMIZED ACCORDING TO REQUESTS
输入端允许在“A”向视图
可根据顾客的要求进行非标设计“A” VIEW AS INPUT IS AVAILABLE
UNITS:
mm
1 inch =25.4 mm
单 位:NOTICE 注意本 公 司 保 留 改 进 产 品 的 权 利 而 不 再 另 行 通 知
以 上 图 纸 仅 供 参 考▲ This drawing is just for your reference 选型时请确保实际载荷在曲线范围内▲ PLEASE BE SURE TO REMAIN UNDER THIS CURVE ▲ The drawing is subject to change due to new design without prior notice Ø40
NORMAL SLEWING DRIVE HSE21-2回转式减速器206kg VIEW A OPTION
A 向 选 项
VIEW B OPTION
B 向 选 项
HSE21-2
Slewing Drive Performance Parameters 回转式减速器性能参数表43.6 kN.m 32264 lbf.ft 52.3 kN.m 38702 lbf.ft 167 kN.m 125×103 lbf.ft 1058 kN 238×103 lbf.ft 421 kN 95×103 lbf.ft 265 kN 60×103 lbf.ft 216 kN 49×103 lbf.ft 82 : 1≤ 0.15°206kg
Output Torque 输出转矩Static Axial Rating 轴向静载荷Static Radial Rating 径向静载荷Dynamic Axial Rating 轴向动载荷Dynamic Radial Rating 径向动载荷Gear Ratio 减速比Tracking Precision 精度等级Weight 重量Data
参数
Model
类型
Max Output Torque 最大转矩Tilting Moment Torque 倾覆力矩HSE21-2
MOMENT LOAD CHART 承 载 力 矩 表 Axial Load & Tilting Moment 轴 向 载 荷 & 倾 覆 力 矩
倾 覆 力 矩3k N .m (×10 l b f .f t )T i l t i n g M o m e n t T o r q u e 轴 向 载 荷Axial Load kN (×10 lbf)3
10005007501250
250(56.2)(112.4)(168.6)(224.8)(281)110.2(40)
(60)
81.3(80)
108.4(100)135.5(120)162.70189.70(140)。