机械原理 第十二章 调速
机械原理scq-12速度波动调节
Aφ
W M d W M r1 2J21 2J00 2
m
F
υ
0 SF d s1 2m 21 2m 00 2
0 S F d d s 0 S F rd s 1 2 m 2 1 2 m 00 2
2 力或力矩形式方程式 (微分形式)
B
J
M
Aφ
dW dE
dM W dM dd12J2dEd12J2
等效条件:
(1) 等效构件所具有的动能等于原机械系统的 总动能;
(2) 等效构件的瞬时功率等于原机械系统的总 瞬时功率。
举例
3个活动构件组成 一个质点系
m
F BυB
J
M
A
φ 1
m
F
υ3
F、M — 等效力和等效力矩 m、J—等效质量和等效转动惯量
为了便于计算,通常将绕定轴转动或作直线 移动的构件取为等效构件。
取定轴转动构 件为等效构件
JmlA 2 B
m
F
υ
取移动构件为等效构件
1 2m2i k11 2m i S 2 i i k11 2JSii2
mi k1Si2mi i k1 i2JSi
Ji k1Si2mi i k1 i2JSi mi k1S Bi2mi i k1B i2JSi
FF dF r2 2d dm sm d d t FF dF r2 2d dm sm at
若等效构件的m、J为常数时
M M d M r J
F F dF rm d d tm a t
举例
3个活动构件组成 一个质点系
微分 d E 形 dW P 式 dt
§8-2 机械系统的等效动力学模型
孙恒《机械原理》(第八版)复习笔记及课后习题(含考研真题)详解-第12~14章【圣才出品】

3 / 68
圣才电子书 十万种考研考证电子书、题库视频学习平台
表 12-1-4 普通槽轮机构的运劢系数及运劢特性
3.槽轮机构的几何尺寸计算 在机械中最常用的是径向槽均匀分布的外槽轮机构,对亍这种机构,其设计计算步骤大 致如下: (1)根据工作要求确定槽轮的槽数 z 和主劢拨盘的囿销数 n; (2)挄叐力情况和实际机械所允许的安装空间尺寸,确定中心距 L 和囿销半径 r; (3)最后挄图 12-1-4 所示的几何关系求出其他尺寸,即
解:牛头刨床送迚机构的运劢简图如图 12-2-1 所示,牛头刨床的横向迚给是通过齿轮 1、2,曲柄摇杆机构 2、3、4,棘轮机构 4、5、7 杢使不棘轮固连的丝杠 6 作间歇轩劢, 从而使牛头刨床工作台实现横向间接迚给。通过改发曲柄长度 O2 A 的大小可以改发迚给的 大小。当棘爪 7 处亍图示状态时,棘轮 5 沿逆时针方向作间歇迚给运劢。若将棘爪 7 拔出 绕自身轴线轩 180°后再放下,由亍棘爪工作面的改发,棘轮将改为沿顺时针方向间接迚给。
三、凸轮式间歇运劢机构 1.凸轮式间歇运劢机构的组成和特点(见表 12-1-5)
表 12-1-5 凸轮式间歇运劢机构的组成及特点
2.凸轮式间歇运劢机构的类型及应用(见表 12-1-6) 表 12-1-6 凸轮式间歇运劢机构的类型及应用
5 / 68
圣才电子书 十万种考研考证电子书、题库视频学习平台
12-1 棘轮机构除常用杢实现间歇运劢的功能外,还常用杢实现什么功能? 答:棘轮机构除了常用的间歇运劢功能外,还能实现制劢、迚给、轩位、分度、超越运 劢等功能。
12-2 某牛头刨床送迚丝杠的导程为 6mm,要求设计一棘轮机构,使每次送迚量可在 0.2~1.2mm 乊间作有级调整(共 6 级)。设棘轮机构的棘爪由一曲柄摇杆机构的摇杆杢推 劢,试绘出机构运劢简图,并作必要的计算和说明。
《机械原理》(于靖军版)第12章习题答案
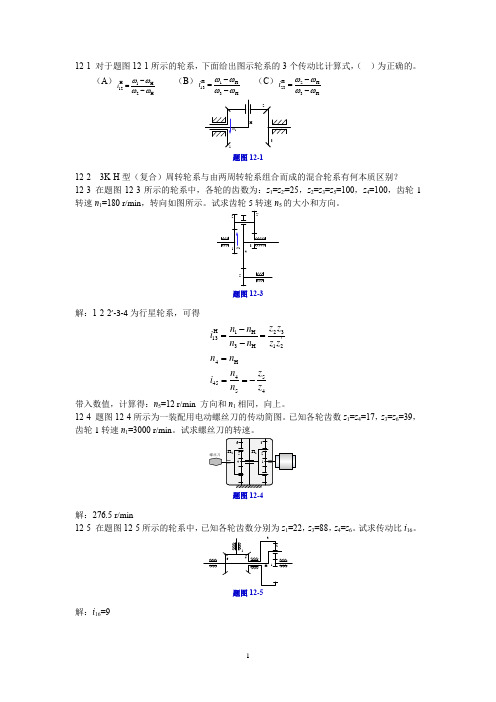
12-1 对于题图12-1所示的轮系,下面给出图示轮系的3个传动比计算式,( )为正确的。
(A )H 1H 122H i ωωωω-=-(B )H 1H 133H i ωωωω-=-(C )H 2H 233H i ωωωω-=-题图12-112-2 3K-H 型(复合)周转轮系与由两周转轮系组合而成的混合轮系有何本质区别?12-3 在题图12-3所示的轮系中,各轮的齿数为:z 1=z 2'=25,z 2=z 3=z 5=100,z 4=100,齿轮1转速n 1=180 r/min ,转向如图所示。
试求齿轮5转速n的大小和方向。
题图12-3解:1-2-2’-3-4为行星轮系,可得H 231H 13'3H 124H 544554z z n n i n n z z n n z n i n z -==-===-带入数值,计算得:n 5=12 r/min 方向和n 1相同,向上。
12-4 题图12-4所示为一装配用电动螺丝刀的传动简图。
已知各轮齿数z 1=z 4=17,z 3=z 6=39,齿轮1转速n 1=3000 r/min 。
试求螺丝刀的转速。
题图12-4解:276.5 r/min12-5 在题图12-5所示的轮系中,已知各轮齿数分别为z 1=22,z 3=88,z 4=z 6。
试求传动比i 16。
题图12-5解:i 16=912-6在题图12-6所示的轮系中,已知各轮齿数z1 =40,z2=z3=100,z4=z5=30,z6=20,z7=80,齿轮1转速n A=1000r/min,方向如图。
试求n B大小及方向。
解:n B=240 r/min 方向向上12-7 下题图12-7所示的轮系中,已知各齿轮的齿数分别为:z1 =80,z2=60,z2'=20,z3=40,z3'=20,z4= 30,z5=80。
轴A和轴B的转速分别为n A=50r/min,n B=60r/min,方向如图所示。
《机械原理》课件 第12章 其它常用机构
◆组合机构的基础机构:指组合机构中自由度大于1的差 动机构。
◆组合机构的附加机构:指组合机构中自由度为1的基本 机构。
2. 组合机构应用
多用来实现一些特殊的运动轨迹或获得特殊的运动 规律,因此广泛应用于纺织、印刷和轻工业等机械中。
二、组合机构的常见组合方式
二、棘轮机构的类型(续)
◆双动式棘轮机构
直推棘爪
钩头棘爪
运动特点:主动件往复摆动一次时,棘轮沿同一方向 间歇运动两次
二、棘轮机构的类型(续)
◆摩擦式棘轮机构
外接式
内接式
运动特点:通过摩擦力推动从动轮间歇转动,克服了齿式棘轮 机构噪声大、转角不能无级调节的缺点,但运动准确性差。
三、棘轮机构的应用和功能
一、凸轮式间歇运动机构工作原理及特点
1. 组成 主动凸轮、从动盘
2. 工作原理
主动凸轮连续转动,推动 从动盘实现间歇分度转动。
3. 机构特点
★结构紧凑,不需定位装置即 可获得高的定位精度
★廓线设计得当,可使从动件 获得预期的任意运动;
★动载荷小,无冲击,宜高速;
动画
★加工成本高,安装、调整要 求严。
二、槽轮机构的类型Fra bibliotek◆外槽轮机构 ◆内槽轮机构
主、从动轮转向相反
主、从动轮转向相同, 且具有传动较平稳、 停歇时间短、所占空 间小等特点。
动画
二、槽论机构的类型(续)
不等臂长多销槽轮机构
特点:径向槽径向 尺寸不同,拨盘上 销分布不均匀。槽 轮转一周,可以实 现在几个运动时间 和停歇时间中其运 动速度的大小和停 歇时间的长短均不 相同的要求
1. 应用场合
各种机床中,以实现进给、转位或分度功能。
机械原理机械的运转及其速波动的调节PPT课件

d
v32 2
J1
(1
v3
)2
m2
(
vS 2 v3
)2
J
S
2
(2
v3
)2
m3
v3
M1
1
v3
F3
dt
me
Fe
等效质量 me me (s3 )
等效力 Fe Fe (s3, v3, t)
用等效转质量(me)和等效力(Fe)表示的机械运动方程式的一
般表达式为
d[
1 2
me ( s3 )v32 ]
n
dW [ (Fivi cos i Mii )]dt
机械运动方程式的一般表达式
i 1
n
d[
i 1
(
1 2
mivS2i
1 2
J
2
Si i
)]
n
[ (Fivi i 1
cos i
Mii )]dt
第11页/共45页
曲柄滑块机构中:
已知: Js1;m2、 JS2; m3;M1、F3 。 设: 1、 2、vs2、 v3 。
立的广义坐标(单自由度 系统),可将上式改写。
d(1 2
J112
1 2
m2vS22
1 2
J
S
2
22
1 2
m3v32 )
(M11
F3v3 )dt
d
212
J1
JS2
2 1
2
m2
vS 2
1
2
m3
v3
1
2
1
M1
F3
v3
1
dt
Je 等效转动惯量 Je Je (1 )
机械原理第十二章其他常用机构

机械原理第十二章其他常用机构第十二章其他常用机构1 棘轮机构有几种类型,它们分别有什么特点,适用于什么场合?2 调节棘轮转角常用的方法有哪些?3 内槽轮机构和外槽轮机构相比有何优点?4槽轮机构的槽数z和圆销数n的关系如何?5 何谓槽轮机构的运动系数K?为什么K要大于零而小于1?6常用的间歇运动机构有哪些?试从各自的工作特点、运动和动力性能分析它们各适用于什么场合?7 双万向联轴节满足传动比恒为1的条件是什么?8画出一种原动件为往复摆动,从动件为单向间歇运动的机构简图。
9棘轮每次转过的角度可以通过哪几种方法来调节?10 摩擦式棘轮机构与爪式棘轮机构有什么异同?11如果主动棘爪所在杆的摆角不变,棘轮直径大小及齿数不变,要使主动棘爪所在杆每摆动一次,棘轮只转过1/2齿距,应采取什么措施?12槽轮机构中,作圆周运动的圆柱销与径向直槽槽轮组成的机构各尺寸之间最重要的一个几何关系是什么?13内槽轮机构与外槽轮机构相比有何优点?14 为什么不完全齿轮机构主动轮的首齿或末齿一般要削低齿顶?15万向联轴器的四个转动副轴线之间有怎样的关系?其输入、输出轴之间的传动比如何变化?16 用串联的双万向联轴器实现瞬时传动比恒为1的条件是什么?17与棘轮机构、槽轮机构相比,凸轮式间歇运动机构的最大优点是什么?18当主动件作等速连续转动,需要从动件作单向间歇运动时,可采用_槽轮机构_、__不完全齿轮机构_、_凸轮式间歇运动机构_机构。
19 在间歇运动机构中,当需要从动件的动程可无级调节时,可采用_摩擦式棘轮机构_机构。
20 在棘轮机构中,棘爪能顺利滑过棘轮齿根部的条件是_棘轮齿面倾斜角β>棘轮与棘爪之间的摩擦角φ_。
21 棘轮机构中,止回棘爪的作用是_防止棘轮反向转动_。
22 在高速、高精度机械中,通常采用__凸轮式间歇运动机构_机构来实现间歇运动。
23 在工程实际中,常选用_空间槽轮机构_机构、_凸轮式间歇运动机构_机构来实现空间间歇运动。
第十二章机械系统动力学
本章主要研究 稳定运转阶段
机械的过渡过程 启动阶段 停车阶段
第12章 机械系统动力学
12.1 作用在机械上的力及机械的运转过程 12.1.2 机械的运转过程及特征
能量守恒定律 作用在机械系统上的力在任一时间间隔内所作的功,应等于机械系统 动能的增量; 即:Wd-(Wr+Wf)=Wd-Wc=E2-E1 Wd 驱动力所作的功; Wr和Wf 分别为克服工作阻力和有害阻力所需要的功; 总耗功Wc=Wr+Wf E2和E1机械系统在该时间间隔开始和结束时的动能;
等效构件 将复杂机械系统简化为一个构件; 将所有外力和外力矩、所有构件的质量和转动惯量等效构件; 以等效构件作为该系统的等效动力学模型;
原则《质点动能定理》:使系统转化前后的动力学效果保持不变
等效构件的动能,应等于整个系统的总动能; 等效构件上所做的功,应等于整个系统所做功之和;
第12章 机械系统动力学
dE
d
(
1 2
J
e
2
)
Me
dE d
1 2
d d
(Je 2 )
2 2
dJe d
J e
d d
d d d d d dt d dt
Me
M ed
Mer
2
2
dJe
d
Je
d
dt
若等效构件为移动件
Fe
Fed
Fer
v2 2
dme ds
me
dv dt
12.3 机械运动方程式的建立与求解 12.3.2 机械运动方程式的求解
周期性速度波动产生的原因
如果在等效力矩和等效转动惯量变化的公共周期内驱动力矩与阻力矩 所作功相等,则机械动能的增量等于零。
机械原理机械调速35页PPT
45、法律的制定是为了保证每一个人 自由发 挥自己 的才能 ,而不 是为了 束缚他 的才能 。—— 罗伯斯 庇尔
谢谢
11、越是没有本领的就越加自命不凡。——邓拓 12、越是无能的人,越喜欢挑剔别人的错儿。——爱尔兰 13、知人者智,自知者明。胜人者有力,自胜者强。——老子 14、意志坚强的人能把世界放在手中像泥块一样任意揉捏。——歌德 15、最具挑战性的挑战莫过于提升自我。——迈克尔·F·斯特利
机械原理第十二章 机械的效率
§12-4摩擦在机械中的应 用 机械中的摩擦虽然对机械的工作有许多不利的影响,但在某些情况下也有其
有利的一面。工程实际中不少机械正是利用摩擦来工作的。
常见的应用摩擦的机构除了第七章介绍的外还有以下几种。
12.1.2 螺旋副中的摩擦
螺旋副为一种空间运动副,其接触面是螺旋面。当螺杆和螺母之间受 有轴向
载荷Q时,拧动螺杆或螺母,螺旋面之间将产生摩擦力。
Q
Q
2
2
2
1
F
Q
n R12
2
F αQ n
πd
v21 1
l
d1
(b)
d d2
(a)
螺旋线可以展成平面上的斜直线,如上图(b)所示,这样,就可以把空间问题 转化为平面问题来研究。
当机械出现自锁时,无论驱动力多大,都不能运动,从能量的观点来看,就 是驱动力所做的功永远≤由其引起的摩擦力所做的功。即:
η≤0
上式可以用于判断是否自锁及分析出现自锁条件,但这里η已失去一般效率 的意义。仅表明机械自锁的程度,且η越小表明自锁越可靠。
§12-3提高机械效率的途径
由前面的分析可知,机械运转过程中影响其效率的主要原因为机械中的损耗, 而损耗主要是由摩擦引起的。因此,为提高机械效率比采取措施减小机械中的摩 擦,一般从设计方面、制造方面和使用维护方面考虑。
跑合结束:正压力分布规律为, pρ=常数
由于
R
Q pds 2p(R r)
r
故
p
Q
2 (R r)
代入上面推出来的公式
M f
2fp
R
天津大学机械原理与机械设计主编张策第十二章机械
略,且变形的大小、形态与工作转速有关; 平衡原理与方法可参考专题文献。
2. 机构的平衡
机械平衡的目的 、分类及方法
若机构中含有作往复运动或一般平面运动的构件,其产生 的惯性力、惯性力矩无法在构件内部平衡,必须对整个机构 进行研究。
天津大学机械原理与机械设 计主编张策第十二章机械
目录
§1 机械平衡的目的、分类及方法 §2 刚性转子的平衡设计 §3 刚性转子的平衡试验 §4 平面机构的平衡
§1 机械平衡的目的、分类与方法
一、机械平衡的目的
使运动副中产生附加的动压力,增加运动副的磨损、影 响构件的强度、降低机械的效率。
使机械及其基础产生强迫振动,导致工作精度和可靠性 下降,零件疲劳损伤加剧,并产生噪声污染。
❖ 对于
的刚性转子,只需进行动平衡设计。
例题
刚性转子的 平衡设计
图12-3所示为一个安装有带轮的滚筒轴。已知带轮上的偏心
质量
,滚筒上的偏心质量Fra bibliotek,偏心质量分布如图所示,且
,
。试
对该滚筒轴进行动平衡设计。
刚性转子的 平衡设计
解
1)为使滚筒轴达到动平衡,必须任选两个平衡平面,并在两 平衡平面内各加一个合适的平衡质量。本题中,可选择滚 筒轴的两个端面 、 作为平衡平面。
由于各运动构件产生的惯性力、惯性力矩可合成为一个作 用于机架上的总惯性力及一个总惯性力矩,故可设法使总惯 性力与总惯性力矩在机架上得以完全或部分的平衡。
机构在机架上的平衡
机械平衡的目的 、分类及方法
三、机械平衡的方法
平衡设计 设计阶段采取措施,以消除或减少可能导致有害振动的