实验一:系统响应及系统稳定性
华南农业大学自动控制实验三典型三阶系统动态性能和稳定性分析
题 目实验三 典型三阶系统动态性能和稳定性分析年级专业班级组别姓名(学号)日期实验三 典型三阶系统动态性能和稳定性分析一、实验目的1.学习和掌握三阶系统动态性能指标的测试方法。
2.观察不同参数下典型三阶系统的阶跃响应曲线。
3. 研究典型系统参数对系统动态性能和稳定性的影响。
二、实验内容观测三阶系统的阶跃响应,测出其超调量和调节时间,并研究其参数变化对动态性能和稳定性的影响。
三、实验原理任何一个给定的线性控制系统,都可以分解为若干个典型环节的组合。
将每个典型环节的模拟电路按系统的方框图连接起来,就得到控制系统的模拟电路图。
典型三阶系统的结构图如图25所示:图25 典型三阶系统的结构图其开环传递函数为23()(1)(1)K G s S T s T s =++,其中1234K K KK T =,三阶系统的模拟电路如图26所示:题目实验三典型三阶系统动态性能和稳定性分析年级专业班级组别姓名(学号)日期图26三阶闭环系统模拟电路图模拟电路的各环节参数代入G(s)中,该电路的开环传递函数为:SSSKSSSKSG++=++=236.005.0)15.0)(11.0()(该电路的闭环传递函数为:KSSSKKSSSKS+++=+++=236.005.0)15.0)(11.0()(φ闭环系统的特征方程为:06.005.0,0)(123=+++⇒=+KSSSSG特征方程标准式:032213=+++aSaSaSa根据特征方程的系数,建立得Routh行列表为:6.005.06.06.0105.012331321131223KSKSKSSaSaaaaaSaaSaaS-⇒-为了保证系统稳定,劳斯表中的第一列的系数的符号都应相同,所以由ROUTH 稳定判据判断,得系统的临界稳定增益K=12。
⎪⎩⎪⎨⎧>>-6.005.06.0KK题目实验三典型三阶系统动态性能和稳定性分析年级专业班级组别姓名(学号)日期即:⎪⎩⎪⎨⎧<⇒>=⇒=Ω>⇒<<系统不稳定系统临界稳定系统稳定41.7KΩR12K41.7KΩR12K7.4112KKR三、实验步骤1、按照实验原理图接线,设计三阶系统的模拟电路2、改变RX的取值,利用上位机软件仿真功能,获取三阶系统各种工况阶跃响应曲线。
实验四三阶系统的瞬态响应及稳定性分析-一剖析
实验四三阶系统的瞬态响应及稳定性分析一、实验目的(1)熟悉三阶系统的模拟电路图。
(2)由实验证明开环增益K对三阶系统的动态性能及稳定性的影响。
(3)研究时间常数T对三阶系统稳定性的影响。
二、实验设备序号1 型号DJK01 电源控制屏备注该控制屏包含“三相电源输出”等几个模块。
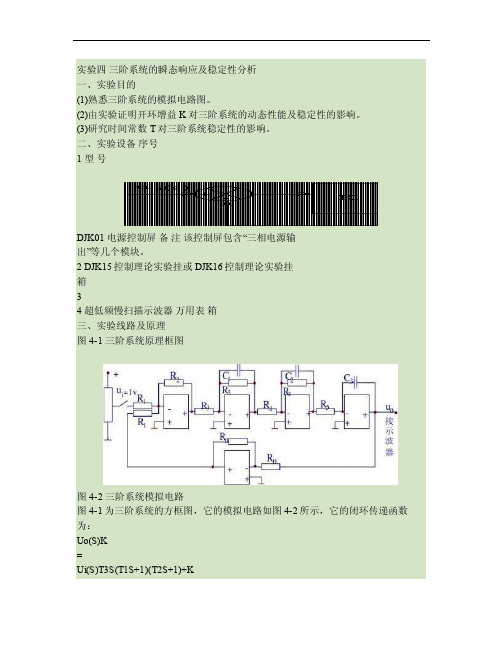
2 DJK15控制理论实验挂或DJK16控制理论实验挂箱34 超低频慢扫描示波器万用表箱三、实验线路及原理图4-1 三阶系统原理框图图4-2 三阶系统模拟电路图4-1为三阶系统的方框图,它的模拟电路如图4-2所示,它的闭环传递函数为:Uo(S)K=Ui(S)T3S(T1S+1)(T2S+1)+K该系统的特征方程为:T1T2T3S³+T3(T1+T2)S²+T3S+K=0其中K=R2/R1,T1=R3C1,T2=R4C2,T3=R5C3。
若令T1=0.2S,T2=0.1S,T3=0.5S,则上式改写为S3+15S2+50S+100K=0用劳斯稳定判据,求得该系统的临界稳定增益K=7.5。
这表示K>7.5时,系统为不稳定;K<7.5时,系统才能稳定运行;K=7.5时,系统作等幅振荡。
除了开环增益K对系统的动态性能和稳定性有影响外,系统中任何一个时间常数的变化对系统的稳定性都有影响,对此说明如下:令系统的剪切频率为ωc,则在该频率时的开环频率特性的相位为:ϕ(ωc)= - 90° - tg-¹T1ωc - tg-¹T2ωc 相位裕量γ=180°+ϕ(ωc)=90°- tg-¹T1ωc- tg-¹T2ωc 由上式可见,时间常数T1和T2的增大都会使γ减小。
四、思考题(1)为使系统能稳定地工作,开环增益应适当取小还是取大?(2)系统中的小惯性环节和大惯性环节哪个对系统稳定性的影响大,为什么?(3)试解释在三阶系统的实验中,输出为什么会出现削顶的等幅振荡?(4)为什么图3-2和图4-1所示的二阶系统与三阶系统对阶跃输入信号的稳态误差都为零?(5)为什么在二阶系统和三阶系统的模拟电路中所用的运算放大器都为奇数?五、实验方法图4-1所示的三阶系统开环传递函数为KT3S(T1S+1)(T2S+1)(1)按K=10,T1=0.2S, T2=0.05S, T3=0.5S的要求,调整图4-2中的相应参数。
仿真实验2:系统的频率响应和稳定性
2系统的频率响应和稳定性研究一.实验目的1. 绘制并观察典型系统的开环幅频曲线。
2. 绘制并观察典型系统的开环对数频率曲线。
3. 运用恩奎斯特准则判断闭环系统的稳定性。
二.实验要求1. 根据所给开环传递函数的机构形式,绘制相应的开环幅频曲线和开环对数频率曲线。
2. 如绘制的开环幅相曲线不封闭,或用文字说明所缺部分曲线的走向,或在图上添加所缺曲线;曲线与(-1,j0)点的几何关系应足够清晰,能够支持判断结论的导出。
3. 对该开环传递函数构成的单位负反馈系统的稳定性做出判断,说明理由;假如闭环不稳定,则应指出不稳定极点的数目。
三.实验内容1. 根据所给开环传递函数的结构形式,首先绘制出相应的开环幅频曲线和开环对数频率曲线。
2. 对于存在积分环节的开环传递来说,因为得到的开环幅相曲线不封闭,所以需在图上添加所缺曲线,以使曲线与(-1,j0)点的几何关系清晰,支持判断结论的准确导出。
3. 最后,利用开环幅频稳定判据(恩奎斯特准则)或开环对数频率稳定判据对开环传递函数构成的单位负反馈系统的稳定性作出判断;假如闭环不稳定,则指出不稳定极点的数目。
(1) 开环传递函数的形式为)1)(1(211++=s T s T KG ,其中K , T 1 , T 2可取大于0的任意数。
举例,如令T 1=1,T 2=2,K=1,则11(1)(21)G s s =++ ,此时的指令如下:零极点形式的传递函数指令:G=zpk([],[-1,-1/2],1);得到开环幅频曲线(恩奎斯特曲线):figure(1);nyquist(G);得到开环对数频率曲线:figure(2);margin(G);可以利用零极点形式的时域指令进行验证结果,也就是看闭环实部根是否都<0, 此时的指令如下:由零极点形式转换为因子式形式:[n1,d1]=zp2tf([],[-1,-1/2],1);G=n1+d1; 时域闭环根:roots(G);-1-0.500.51 1.52Nyquist DiagramReal AxisI m a g i n a r y A x i sM a g n i t u d e (d B )10-210-110101102P h a s e (d e g )Bode DiagramGm = Inf dB (at Inf rad/sec) , P m = 93.3 deg (at 0.666 rad/sec)Frequency (rad/sec)因子式形式的开环频域指令:因子式形式的传递函数指令:G=tf([0,0,1],[2,3,1])得到开环幅频曲线(恩奎斯特曲线):figure(3);nyquist(G) 得到开环对数频率曲线:figure(4);margin(G)可以利用零极点形式的时域指令进行验证结果,也就是看闭环实部根是否都<0, 此时的指令如下:由零极点形式转换为因子式形式: n1=[0,0,1],d1=[2,3,1];G=n1+d1; 时域闭环根:roots(G);-1-0.8-0.6-0.4-0.200.20.40.60.81Nyquist DiagramReal AxisI m a g i n a r y A x i sM a g n i t u d e (d B )10-210-110101102P h a s e (d e g )Bode DiagramGm = Inf dB (at Inf rad/sec) , P m = -180 deg (at 0 rad/sec)Frequency (rad/sec)(2))1)(1)(1(3212+++=s T s T s T KG ,其中K , T 1 , T 2 , T 3 可取大于0的任意数。
自控实验报告二典型系统的时域响应和稳定性分析

自控实验报告二典型系统的时域响应和稳定性分析实验二典型系统的时域响应和稳定性分析一、实验目的1.研究二阶系统的特征参量(ξ、ωn) 对过渡过程的影响。
2.研究二阶对象的三种阻尼比下的响应曲线及系统的稳定性。
3.熟悉 Routh 判据,用 Routh 判据对三阶系统进行稳定性分析。
二、实验设备PC 机一台,TD-ACC+(或 TD-ACS)教学实验系统一套。
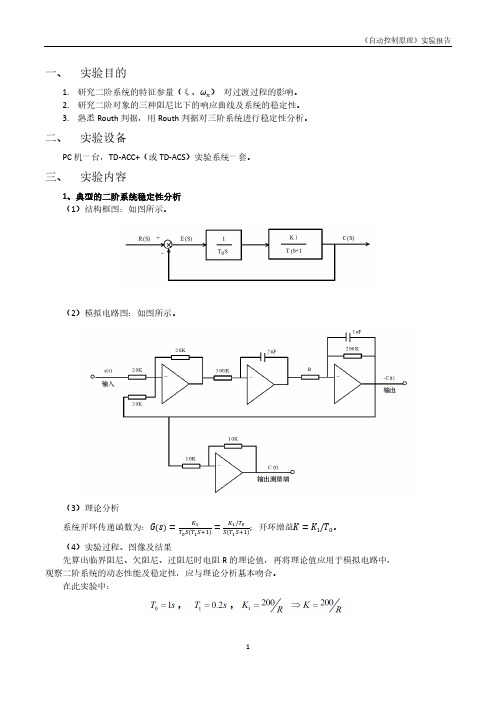
三、实验原理及内容1.典型的二阶系统稳定性分析(1) 结构框图:如图 1.2-1 所示。
(2) 对应的模拟电路图:如图 1.2-2 所示。
(3) 理论分析系统开环传递函数为:G(s)=k1T0S(T1S+1)=K1T0S(T1S+1); 开环增益K=K1T0(4) 实验内容先算出临界阻尼、欠阻尼、过阻尼时电阻 R 的理论值,再将理论值应用于模拟电路中,观察二阶系统的动态性能及稳定性,应与理论分析基本吻合。
在此实验中(图 1.2-2)2.典型的三阶系统稳定性分析(1) 结构框图:如图 1.2-3 所示。
(2) 模拟电路图:如图 1.2-4 所示。
(3) 理论分析系统的开环传函为:G(s)H(s)=500RS(0.1S+1)(0.5S+1)(其中K=500R)系统的特征方程为: 1 +G(s)H(s)=0 S3+12S2+20S+20K=0。
(4) 实验内容实验前由 Routh 判断得 Routh 行列式为:四、实验步骤1.将信号源单元的“ST”端插针与“S”端插针用“短路块”短接。
由于每个运放单元均设臵了锁零场效应管,所以运放具有锁零功能。
将开关设在“方波”档,分别调节调幅和调频电位器,使得“OUT”端输出的方波幅值为 1V,周期为 10s 左右。
2. 典型二阶系统瞬态性能指标的测试(1) 按模拟电路图 1.2-2 接线,将 1 中的方波信号接至输入端,取 R = 10K。
(2) 用示波器观察系统响应曲线 C(t),测量并记录超调 MP、峰值时间 tp 和调节时tS。
实验二 典型系统的时域响应和稳定性分析
一、实验目的
1.研究二阶系统的特征参量(ξ、ωn)对过渡过程的影响。
2.研究二阶对象的三种阻尼比下的响应曲线及系统的稳定性。
3.熟悉Routh判据,用Routh判据对三阶系统进行稳定性分析。
二、实验设备
PC机一台,TD-ACC+(或TD-ACS)实验系统一套。
三、实验内容
1、典型的二阶系统稳定性分析
(1)结构框图:如图所示。
(2)模拟电路图:如图所示。
(3)理论分析
系统开环传递函数为:G(s)=K1
T0S(T1S+1)=K1/T0
S(T1S+1)
;开环增益K=K1/T0。
(4)实验过程、图像及结果
先算出临界阻尼、欠阻尼、过阻尼时电阻R的理论值,再将理论值应用于模拟电路中,观察二阶系统的动态性能及稳定性,应与理论分析基本吻合。
在此实验中:
实物连接图如下:
实测响应曲线如下:
典型二阶系统瞬态性能指标
2、典型的三阶系统稳定性分析(1)结构框图:如图所示。
(2)模拟电路图:如图所示。
(3)理论分析
(4)实验过程、图像及结果
实物连接图如下:
实测响应曲线如下:
典型三阶系统在不同开环增益下的响应情况
四、实验心得及总结。
自动控制原理实验(1)
实验一 典型环节的电路模拟一、实验目的1.熟悉THKKL-5型 控制理论·计算机控制技术实验箱及“THKKL-5”软件的使用; 2.熟悉各典型环节的阶跃响应特性及其电路模拟;3.测量各典型环节的阶跃响应曲线,并了解参数变化对其动态特性的影响。
二、实验设备1.THKKL-5型 控制理论·计算机控制技术实验箱;2.PC 机一台(含“THKKL-5”软件)、USB 数据采集卡、37针通信线1根、16芯数据排线、USB 接口线。
三、实验内容1.设计并组建各典型环节的模拟电路;2.测量各典型环节的阶跃响应,并研究参数变化对其输出响应的影响。
四、实验原理自控系统是由比例、积分、微分、惯性等环节按一定的关系组建而成。
熟悉这些典型环节的结构及其对阶跃输入的响应,将对系统的设计和分析十分有益。
本实验中的典型环节都是以运放为核心元件构成,其原理框图 如图1-1所示。
图中Z 1和Z 2表示由R 、C 构成的复数阻抗。
1.比例(P )环节比例环节的特点是输出不失真、不延迟、成比例地复现输出信号的变化。
图1-1 它的传递函数与方框图分别为:KS U S U S G i O ==)()()(当U i (S)输入端输入一个单位阶跃信号,且比例系数为K 时的响应曲线如图1-2所示。
2.积分(I )环节 图1-2积分环节的输出量与其输入量对时间的积分成正比。
它的传递函数与方框图分别为:设U i (S)为一单位阶跃信号,当积分系数为T 时的响应曲线如图1-3所示。
TsS U S Us G i O1)()()(==图1-33.比例积分(PI)环节比例积分环节的传递函数与方框图分别为:)11(11)()()(21211212CSR R R CSR R R CSR CS R S U S U s G i O +=+=+==其中T=R 2C ,K=R 2/R 1设U i (S)为一单位阶跃信号,图1-4示出了比例系数(K)为1、积分系数为T 时的PI 输出响应曲线。
系统的稳定性常见判据
思路:
①特征方程→根的分布(避免求解) ②开环传递函数→闭环系统的稳定性
(开环极点易知,闭环极点难求)
稳定判据
二、Routh (劳斯)稳定判据
——代数判据(依据根与系数的关系判断根的分布)
1. 系统稳定的必要条件
设系统特征方程为: D(s) ansn an1sn1 a1s a0 0
s3
2 n
(
s
K
)
2
n s 2
2 n
s
K
2 n
特征方程:
D(s)
s3
2
ns2
2 n
s
K
2 n
0
即: D(s)=s3+34.6s2+7500s+7500K=0
由系统稳定的充要条件,有
s3
1
7500 0
s2
34.6
7500K 0
s1 34.6 7500 7500K
0
34.6
s0
7500K
0
(1) 7500K>0,亦即K>0。显然,这就是由必要条件所 34.6 7500 7500K 0
① 确定P
② 作G(j)H(j)的Nyquist图 ③ 运用判据
三、Nyquist 稳定判据
例1
三、Nyquist 稳定判据
例2 G(s)H (s)
(T12 s2
K (Ta s 1)(Tb s 1)
2T1s 1)(T2s 1)(T3s
1)
P=1
开环不稳定, 闭环稳定
三、Nyquist 稳定判据
② LF包围原点的圈数 = LGH包围(-1,j0)点的圈数 N=Z-P
控制系统的稳定性分析与设计
控制系统的稳定性分析与设计控制系统的稳定性是控制工程中最为重要的一个参数之一。
一个稳定的控制系统能够使得系统在经过一定的时间后回到原点,而不会发生不可控的偏差,从而保证控制效果的稳定性和可靠性。
本文将从系统稳定性的原理和方法、设计方法及案例等方面探讨控制系统的稳定性分析与设计。
一、系统稳定性的原理和方法1. 系统稳定性的定义系统稳定性指的是系统在外界干扰或参数变化的作用下,回应输出信号与输入信号之间的关系是否稳定。
即在一定时间内,控制系统确保输出值能够跟随输入值的变化,而不会发生不可控的震荡或失控的情况。
2. 系统稳定性的判据良好的系统稳定性需要满足以下条件:(1)经过一定时间后,系统从任何初始状态转移到平衡状态;(2)平衡状态具有稳定性,即系统在发生一定幅度的干扰时,需要在一定时间内回复到原平衡状态;(3)平衡状态的稳定性受到系统参数变化、外界环境变化等多种因素的影响,但是通过合理的调节和控制,使得系统在变化后仍能保持稳定。
3. 系统稳定性的分析方法(1)指标法:它是利用特定的指标量来描述系统的稳定状态,比如阻尼系数、频率响应等。
(2)相关函数法:它是利用系统的特性函数或者频率响应函数来描述系统的稳定性。
(3)传递函数法:传递函数描述输入信号与输出信号之间的关系,可以通过传递函数的特性分析系统的稳定性。
(4)极点分布法:分析系统的极点分布情况,确定系统的极点位置以及极点位置对系统稳定性的影响。
二、控制系统的稳定性设计方法1. PID控制器的设计方法PID控制器是目前使用最为广泛的控制器,它可以通过调节比例系数、积分系数和微分系数来达到控制系统的稳定性。
在进行PID控制器的设计时,需要进行以下步骤:(1)确定控制系统的传递函数;(2)确定控制系统的目标响应曲线;(3)通过目标响应曲线和传递函数设计出PID控制器;(4)进行仿真或实验验证控制系统的稳定性。
2. 模糊控制器的设计方法模糊控制器是一种基于模糊推理的控制器,它可以通过调节模糊逻辑的输入变量和输出变量来达到不同的控制效果。
信号与系统实验报告
信号与系统实验报告目录1. 内容概要 (2)1.1 研究背景 (3)1.2 研究目的 (4)1.3 研究意义 (4)2. 实验原理 (5)2.1 信号与系统基本概念 (7)2.2 信号的分类与表示 (8)2.3 系统的分类与表示 (9)2.4 信号与系统的运算法则 (11)3. 实验内容及步骤 (12)3.1 实验一 (13)3.1.1 实验目的 (14)3.1.2 实验仪器和设备 (15)3.1.4 实验数据记录与分析 (16)3.2 实验二 (16)3.2.1 实验目的 (17)3.2.2 实验仪器和设备 (18)3.2.3 实验步骤 (19)3.2.4 实验数据记录与分析 (19)3.3 实验三 (20)3.3.1 实验目的 (21)3.3.2 实验仪器和设备 (22)3.3.3 实验步骤 (23)3.3.4 实验数据记录与分析 (24)3.4 实验四 (26)3.4.1 实验目的 (27)3.4.2 实验仪器和设备 (27)3.4.4 实验数据记录与分析 (29)4. 结果与讨论 (29)4.1 实验结果汇总 (31)4.2 结果分析与讨论 (32)4.3 结果与理论知识的对比与验证 (33)1. 内容概要本实验报告旨在总结和回顾在信号与系统课程中所进行的实验内容,通过实践操作加深对理论知识的理解和应用能力。
实验涵盖了信号分析、信号处理方法以及系统响应等多个方面。
实验一:信号的基本特性与运算。
学生掌握了信号的表示方法,包括连续时间信号和离散时间信号,以及信号的基本运算规则,如加法、减法、乘法和除法。
实验二:信号的时间域分析。
在本实验中,学生学习了信号的波形变换、信号的卷积以及信号的频谱分析等基本概念和方法,利用MATLAB工具进行了实际的信号处理。
实验三:系统的时域分析。
学生了解了线性时不变系统的动态响应特性,包括零状态响应、阶跃响应以及脉冲响应,并学会了利用MATLAB进行系统响应的计算和分析。
[工学]控制工程基础第五章系统的稳定性
基本要求 1.了解系统稳定性的定义、系统稳定的条件。 2.掌握系统稳定性代数判据的必要条件和充要条件,学会应用代数判 据判定系统是否稳定。 3.掌握Nyquist判据。 4.掌握Bode判据。 5.理解系统相对稳定性概念,能够在Nyquist图和Bode图上加以应用。 本章重点 1.代数判剧、Nyquist判剧和Bode判剧的应用。 2.系统相对稳定性;相位裕度和幅值裕度在 Nyquist图和Bode图上的表 示法。 本章难点 Nyquist判剧及其应用。
劳斯阵列的计算顺序是由上两行组成新的一行。每行计算 到出现零元素为止。一般情况下可以得到一个n+1行的劳 斯阵列。而最后两行每行只有一个元素。
sn s n-1 s n-2 s n -3 s1 s0
an an -1 b1 c1 d1 e1
an - 2 a n -3 b2 c2
an - 4 a n -5 b3
Ck k nk Bk
dk
e k nkt sin dk t
从式可以看出,如果所有闭环极点都在s平面的左半面内, 即系统的特征方程式根的实部都为负,那么随着时间t的增 大,式中的指数项和阻尼指数项将趋近于零。即系统是稳 定的。
y (t ) A j e
j 1
q
p jt
Bk e k nkt cos dk t
k 1
r
k 1
r
Ck k nk Bk
dk
e k nkt sin dk t
系统稳定的充要条件:是特征方程的根均具有负的实 部。或者说闭环系统特征方程式的根全部位于[s]平面 的左半平面内。一旦特征方程出现右根时,系统就不 稳定。
2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验一:系统响应及系统稳定性 通信三班 甘钢生 201241302341 1. 实验目的 (1) 掌握求系统响应的方法。 (2) 掌握时域离散系统的时域特性。 (3) 分析,观察及检验系统的稳定性。 2. 实验原理与方法 在时域中,描写系统特性的方法是差分方程和单位脉冲响应,在频域可以用系统函数描述系统特性。已知输入信号,可以由差分方程,单位脉冲响应或系统函数求出系统对于该输入信号的响应,本实验仅在时域求解。在计算机上适合用递推法求差分方程的解,最简单的方法是采用MATLAB语言的工具箱函数filter函数。也可以用MATLAB语言的工具箱函数conv函数计算输入信号和系统的单位脉冲响应的线性卷积,求出系统的响应。 系统的时域特性指的是系统的线性时不变性质,因果性和稳定性。重点分析系统的稳定性,包括观察系统的暂态响应和稳态响应。 系统的稳定性是指对任意有界的输入信号,系统都能得到有界的系统响应。或者系统的单位脉冲应满足绝对可和的条件。系统的稳定性由其差分方程的系数决定。 实际中检查系统是否稳定,不可能检查系统对于所有有界的输入信号,输出是否都是有界输出,或者检查系统的单位脉冲响应应满足绝对可和的条件。可行的方法是在系统的输入端加入单位阶跃序列,如果系统的输出趋近一个常数,就可以断定系统是否稳定的。系统的稳定输出是指当n→∞时,系统的输出。如果系统稳定,信号加入系统后,系统输出的开始一段称为暂态效应,随n的加大,幅度趋于稳定,达到稳定输出。 注意在以下实验中均假设系统的初始状态为零。 3. 实验内容及步骤 (1) 编制程序,包括产生输入信号,单位脉冲响应序列的子程序,用filter函数或conv函数求解系统输出响应的主程序,程序中要有绘制信号波形的功能。 (2) 给定一个低通滤波器的差分方程为 y(n)=0.05x(n)+0.05x(n-1)+0.9y(n-1) 输入信号 x1(n)=R8(n) x2(n)=u(n) ① 分别求出x1(n)=R8(n)和x2(n)=u(n)的系统响应,并画出其波形。 解: B=[0.05,0.05]; A=[1,-0.9]; x1=[ones(1,8),zeros(1,22)]; x2=ones(1,30); yn1=filter(B,A,x1); yn2=filter(B,A,x2); n=0:length(yn1)-1 subplot(1,2,1); stem(n,yn1,'.') title('(a)');xlabel('n');ylabel('yn1') n=0:length(yn2)-1 subplot(1,2,2); stem(n,yn2,'.') title('(b)');xlabel('n');ylabel('yn2')
n = Columns 1 through 11 0 1 2 3 4 5 6 7 8 9 10 Columns 12 through 22 11 12 13 14 15 16 17 18 19 20 21 Columns 23 through 30 22 23 24 25 26 27 28 29 n = Columns 1 through 11 0 1 2 3 4 5 6 7 8 9 10 Columns 12 through 22 11 12 13 14 15 16 17 18 19 20 21 Columns 23 through 30 22 23 24 25 26 27 28 29
010203000.10.20.30.40.50.60.7(a)nyn1010203000.10.20.30.40.50.60.70.80.91(b)
nyn2
② 求出给定的单位脉冲响应,画出其波形。 x3=[1,zeros(1,29)]; yn3=filter(B,A,x3); n=0:length(yn3)-1 subplot(1,1,1); stem(n,yn3,'.') title('(c)');xlabel('n');ylabel('yn3')
n = Columns 1 through 11 0 1 2 3 4 5 6 7 8 9 10 Columns 12 through 22 11 12 13 14 15 16 17 18 19 20 21 Columns 23 through 30 22 23 24 25 26 27 28 29 05101520253000.010.020.030.040.050.060.070.080.090.1(c)nyn3
(3)给定系统的单位脉冲响应为 h1(n)=R10(n) h2(n)=δ(n)+2.5δ(n-1)+2.5δ(n-2)+δ(n-3) 用线性卷积法求x1(n)=R8(n)分别对系统h1(n)和h2(n)的输出响应,并画出波形
xn=[ones(1,8),zeros(1,22)]; h1n=[ones(1,10),zeros(1,20)]; h2n=[1,2.5,2.5,1,zeros(1,26)]; yn1=conv(xn,h1n); yn2=conv(xn,h2n); n=0:length(yn1)-1 subplot(1,2,1); stem(n,yn1,'.') title('(a)');xlabel('n');ylabel('yn1') n=0:length(yn2)-1 subplot(1,2,2); stem(n,yn2,'.') title('(b)');xlabel('n');ylabel('yn2')
n = Columns 1 through 11 0 1 2 3 4 5 6 7 8 9 10 Columns 12 through 22 11 12 13 14 15 16 17 18 19 20 21 Columns 23 through 33 22 23 24 25 26 27 28 29 30 31 32 Columns 34 through 44 33 34 35 36 37 38 39 40 41 42 43 Columns 45 through 55 44 45 46 47 48 49 50 51 52 53 54 Columns 56 through 59 55 56 57 58 n = Columns 1 through 11 0 1 2 3 4 5 6 7 8 9 10 Columns 12 through 22 11 12 13 14 15 16 17 18 19 20 21 Columns 23 through 33 22 23 24 25 26 27 28 29 30 31 32 Columns 34 through 44 33 34 35 36 37 38 39 40 41 42 43 Columns 45 through 55 44 45 46 47 48 49 50 51 52 53 54 Columns 56 through 59 55 56 57 58
0204060012345678(a)nyn1020406001234567(b)
nyn2
(4)给定一谐振器的差分方程为 y(n)=1.8237y(n-1)-0.9801y(n-2)+bx(n)-bx(n-2) 令b=1/100.49,谐振器的谐振频率为0.4rad 1、 用实验方法检查系统是否稳定。输入信号为u(n)时,画出系统输出波形。 B=[1/100.49,0,-1/100.49]; A=[1,-1.8237,0.9801]; x1=ones(1,256); yn1=filter(B,A,x1); n=0:length(yn1)-1 stem(n,yn1,'.') xlabel('n');ylabel('yn1')
n = Columns 1 through 13 0 1 2 3 4 5 6 7 8 9 10 11 12 Columns 14 through 26 13 14 15 16 17 18 19 20 21 22 23 24 25 Columns 27 through 39 26 27 28 29 30 31 32 33 34 35 36 37 38 Columns 40 through 52 39 40 41 42 43 44 45 46 47 48 49 50 51 Columns 53 through 65 52 53 54 55 56 57 58 59 60 61 62 63 64 Columns 66 through 78 65 66 67 68 69 70 71 72 73 74 75 76 77 Columns 79 through 91 78 79 80 81 82 83 84 85 86 87 88 89 90 Columns 92 through 104 91 92 93 94 95 96 97 98 99 100 101 102 103 Columns 105 through 117 104 105 106 107 108 109 110 111 112 113 114 115 116 Columns 118 through 130 117 118 119 120 121 122 123 124 125 126 127 128 129 Columns 131 through 143 130 131 132 133 134 135 136 137 138 139 140 141 142 Columns 144 through 156 143 144 145 146 147 148 149 150 151 152 153 154 155 Columns 157 through 169 156 157 158 159 160 161 162 163 164 165 166 167 168 Columns 170 through 182 169 170 171 172 173 174 175 176 177 178 179 180 181 Columns 183 through 195 182 183 184 185 186 187 188 189 190 191 192 193 194 Columns 196 through 208 195 196 197 198 199 200 201 202 203 204 205 206 207 Columns 209 through 221 208 209 210 211 212 213 214 215 216 217 218 219 220 Columns 222 through 234 221 222 223 224 225 226 227 228 229 230 231 232 233 Columns 235 through 247 234 235 236 237 238 239 240 241 242 243 244 245 246 Columns 248 through 256 247 248 249 250 251 252 253 254 255