浮基起重系统在规则波中的运动响应试验及分析
7500t浮吊海浪激励下的谐响应分析
2上 海振 华 港 口机 械 股份 有 限公 司 , 海 2 0 2 ) . 上 0 1 5 摘 要 : 用 有 限元 软 件 A YS建 立 5 0t 吊 三 维 计 算 模 型 , 规则 海 浪 载 荷 作 用 下 船 舶 摇 荡 运 动 加 应 NS 0 浮 以
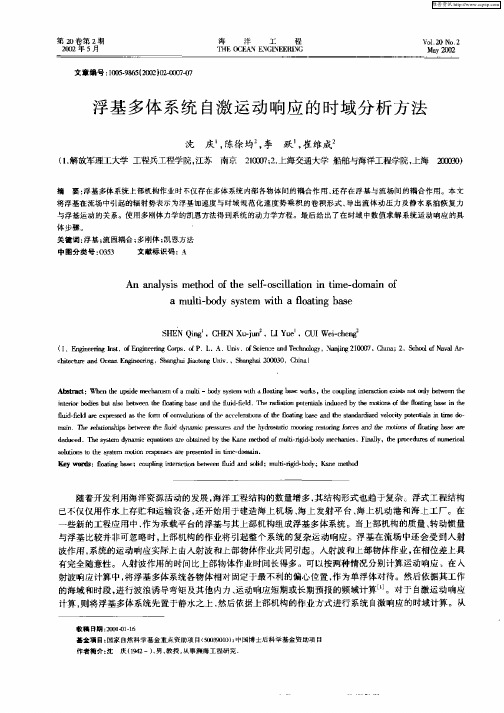
角, 见图 2 பைடு நூலகம்。
l 基 础 运 动 激 励 下 结 构 的 动 力 响 应
船舶 在海 浪作 用下 的摇荡运 动 对安装 在船 上 的起 重机 结构 形 成 基 础激 励 , 构 的位 移 响 应 南 结
刚体 位移 和变 形位 移两 部分 组成 。刚体位 移是 结 构 随基础 运动 的位 移 , 即牵 连运 动 的位移 ; 变形 位
第3卷 9
第 3期
船 海 工 程
S P8 HI OCEAN ENGI NEERI NG
Vo . 9 No 3 13 .
21 0 0年 6月
J n 2 1 u.00
75 t 吊海 浪 激 励 下 的谐 响应 分 析 浮 0 0
丁振 东 吴天行 严 , , 兵 李 义明 ,
动对 起 重机结 构 的动力 响 应 。
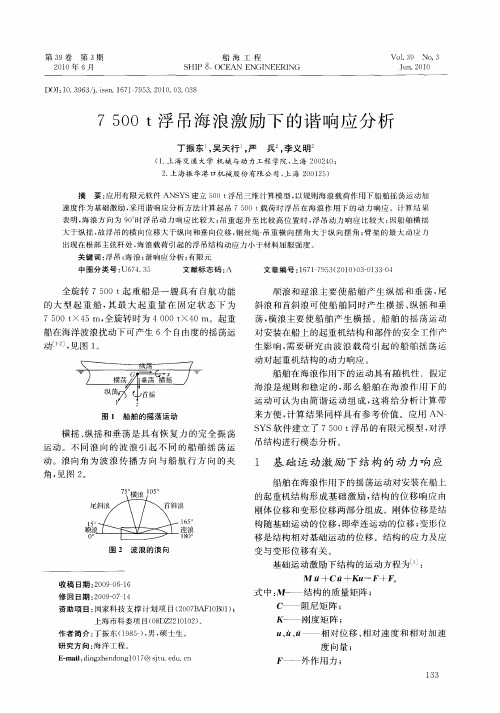
的大 型 起 重 船 , 最 大 起 重 量 在 固定 状 态 下 为 其 75 0t 5m, 0 ×4 全旋 转 时为 40 0t 0m。起 重 0 ×4 船在 海洋 波浪 扰 动下可 产生 6 自由度 的摇荡 运 个
动 , 图 1 见 。
S S软件 建立 了 75 0t 吊的有 限元模 型 , Y 0 浮 对浮 吊结 构进 行模 态分 析 。
横摇 、 纵摇 和 垂荡 是 具 有 恢 复 力 的 完全 振 荡
大型起重船复杂系泊情况下运动响应数值模拟与试验对比研究

大型起重船复杂系泊情况下运动响应数值模拟与试验对比研究工程船舶在海上进行施工作业时需要对作业船舶进行系泊定位。
对于船舶系泊系统定位,由于受到复杂海洋环境的影响,船舶会产生6个自由度的运动。
模拟系泊状态下船舶运动响应,可以预报船舶在复杂海洋环境下的运动,避免船舶运动响应幅值超过作业的允许值,预防危险情况发生,这对于理论研究和工程实际都具有重要的意义。
由于系泊浮体的纵荡、横荡和艏摇运动的回复刚度由系泊系统提供,这三个自由度运动的固有周期与波浪二阶差频力的周期相近,浮体运动易因波浪二阶力作用发生共振使得系泊浮体运动更为剧烈。
因此对于波浪二阶差频力的分析计算对于系泊浮体十分重要。
本文首先介绍了进行系泊船舶运动响应时域模拟所依据的理论基础,包括三维频域势流理论及数值计算方法、悬链线理论、低频阻尼理论以及系泊系统与船舶耦合运动时域模拟基本理论。
同时结合这些理论基础介绍了分析软件SESAM软件的基本情况。
其次,本文研究了波浪二阶力的计算。
包括平均漂移力和波浪二阶差频力的计算,通过对相关模型试验的模拟,分析了不同的二阶力计算方法之间的差异,为后面进行系泊船舶的运动响应计算奠定基础。
之后本文进行了系泊下船舶运动响应的时域模拟。
介绍了相关模型试验的基本情况。
模拟工况包括了规则波和不规则波的海况。
分析了系泊下起重船在规则波中的运动响应特性,比较了在不同的规则波条件下起重船运动响应特性的不同。
通过对低频运动结果的讨论,重点分析了低频阻尼情况。
在不规则波工况的模拟计算中比较了Newman近似法和全QTF矩阵法计算二阶差频力得到的运动响应结果。
讨论了系泊下起重船运动中缆绳张力的情况。
本文对于系泊系统与船舶耦合运动响应数值模拟的结果,为今后的相关理论研究以及相关的工程实际问题提供了技术支持。
浮基多体系统自激运动响应的时域分析方法
将浮基在流场 中引起的辐射 势表示为浮基加速度与时域 规范化速 度势乘 积的卷 积形式 , 出流体动压力 及静水 系泊恢 复力 导 与浮基运动 的关 系。使用 多刚体力学 的凯思方法得 到系统的动力学方程。最后 给出 了在时域 中数值求解 系统运动 响应 的具
体 步骤 。 美键词 : 浮基 ; 流固耦合 ; 多刚体 ; 恩方 法 凯 中国分 类号 : 33 0 5 文献标识码 : A
_7 0
浮 基 多体 系统 自激 运动 响应 的 时域 分 析 方 法
沈 庆 ‘陈徐 均 , , 李
(. 1解放军理工大学 工程兵工程学 院, 江苏 南京
跃’崔维成 ,
2 00 1 3)  ̄
200 ;. 交通大学 ห้องสมุดไป่ตู้舶与海洋工程学院, 13 2上海 17 上海
摘
要: 浮基多体系统 上部机构作 业时不仅存 在多体 系统内部各物体 间的耦合作 用 , 还存在 浮基与流 场间的耦合作 用。本文
An a ayi to ft e s l ocl t n i i — o i n lssmeh d o ef s i ai n t h - l o me d man o f
amut b d y tm i o t g b s li o y s s — e w t af ai a e h l n
维普资讯
第 2 卷 第 2期 0
2 2年 5 1 D 月
海
洋
工
程
TH 队 N E GI E 砌 N E OC N E G
V0 2 N l 0 o2 Ma 0 v2 陀
文章编号 :0596 ( 10.85 砌
) 0
.
bs i t ae n h e
规则波作用下四锚浮标系统动力分析
dF = 0 5Cd wD b( - x ) | - x |
( 2)
式中: dF 为单位长度上的力; Cd 为拖曳力系数; w 为海水密度; D b 为浮标柱体直径; 为水质点速度; x 为 浮体速度。
垂荡方向粘性阻尼力可参考 Hans Cozijn 等[ 3] 的方法进行计算, 不同的是此处应用的是浮标和水质点的
( 1)
0
式中: M 为浮标的广义质量阵; Ma( ) 为浮标的附加质量阵; K ( t - ) 为系统的延迟函数阵; C 为浮标的静
水恢复力系数阵; x
为浮体位移; F d 为拖曳力;
F
( 1) w
和
F
( 2) w
为一阶和二阶波浪力,
Fline为系泊缆索作用力。
1. 2 粘性阻尼力
纵荡和横荡方向阻尼力可应用式( 2) 进行计算:
基于势流理论, 应用边界元方法在频域内计算浮标的附加质量和阻尼、一阶波浪力和二阶平均漂移力, 同时利用浮标的对称性减少了计算量, 节省了计算时间, 采用扩展的边界积分方程法消除了频域计算中的不 规则频率问题, 通过快速傅里叶变换, 将频域计算结果变换到时域; 应用莫里森公式计算浮标及其 skirt 的粘 性作用力。对于系泊缆索, 基于全量的拉格朗日表述和两节点的等参索单元, 应用几何非线性有限元方法和 Newmark 方法计算了系泊缆索张力[ 14] 。最后应用四阶 Runge- Kutta 法计算浮标及其系泊缆索的时域耦合运 动方程, 从而得到浮标的运动响应和系泊缆索的张力。比较分析了两种水深条件下, 不同 skirt 直径和缆索 长度情况下浮标的水动力特性、运动响应和系泊缆索张力。
响, 而垂荡方向的附加质量增加, 辐射阻尼减小, 且能够 减小二阶平均波浪力的峰值。
浮体在波浪中的运动响应

2.3 浮体在波浪中的运动响应2.3.1 浮体动力学方程单自由度刚体自由振动时其动力学方程为:(M+∆M)X+BX+KX=0(2-48)式中:M为刚体对应自由度的质量或惯性质量;∆M为刚体对应自由度的附加质量或附加质量惯性质量;B为阻尼;K为刚体对应自由度的恢复刚度。
式(2-48)每一项都除以(M+∆M),则式子变为:X+2ζλX+λ2X= 0(2-49)式中:ζ=B/[2(M+∆M)λ]为无量纲阻尼比;λ=√KM+∆M为刚体对应自由度的运动固有周期。
当浮体受到简谐载荷作用时,其运动方程为:X+2ζλX+λ2X=F0M+∆Msinωt (2-50)浮体运动稳态解为:X(t)=Asin(ωt−β)(2-51)其中:A=0K√(1−γ2)+(2ζλ)2为运动幅值;γ=ωλ为简谐载荷频率与结构固有频率的比;β=arctan2ζλ1−γ2为运动滞后于简谐载荷的相位。
运动幅值与静位移的比称为动力放大系数DAF(图2.9),即:DAF=AF0/K =√(1−γ2)2+(2ζλ)2(2-52)图2.9 动力放大系数与无量纲阻尼及频率比的关系无量纲阻尼比ζ=0时,DAF=,当激励频率与固有频率接近时,√(1−γ2)2DAF趋近于∞;;当无量纲阻尼比ζ≠0时,DAF极值为DAF max=2ζ√1−ζ2当无量纲阻尼比ζ较小时,DAF极值近似为DAF max≈1。
2ζ由此可以看出,系统阻尼越大,动力放大系数DAF越小,阻尼的存在对于抑制共振幅值起着关键作用。
对于相位:当阻尼比较小,且频率比γ远小于1时,相位角β趋近于0;当频率比γ远大于1时,相位角β趋近于π;当频率比γ=1时,无论阻尼比为何值,响应相位β=π/2。
如图2.10所示为相位角与无量纲阻尼比及频率比的关系。
图2.10 相位角与无量纲阻尼比及频率比的关系在多种环境载荷作用下,浮体动力方程可以表达为:[M+∆M]X+[B rad+B vis]X+[K stillwater+K mooring]X=F1+F2Low+F2Higℎ+F wind+F current+F otℎers(2-53)其中:M为浮体质量矩阵;∆M 为浮体附加质量矩阵;B rad 为辐射阻尼矩阵;B vis 为黏性阻尼矩阵;K stillwater 为静水刚度;K mooring 为系泊系统刚度;F 1为一阶波频载荷;F 2Low 为二阶低频载荷;F 2Higℎ为二阶高频载荷;F wind 为风载荷;F current 为流载荷;F otℎers 为其他载荷。
大型起重船波浪中的运动响应

大型起重船波浪中的运动响应陈亮;张城;张小雅【摘要】The motion amplitude response of the Large Crane Ship during operating is discussed.The effects of damping coefficient on the response are considered.The radius of inertia of the crane ship is calculated using fluid dynamics method and compared with that of conventional vessels.The analysis result shows that the Large Crane Ship operating in waves is safe and reliable.%探讨了起重船在作业时的运动幅值响应。
针对起重船这一特殊船型,考虑了阻尼系数对起重船作业时运动响应的影响;采用流体力学的方法计算出起重船惯性半径,并与常规船惯性半径进行了比较。
结果表明,起重船在波浪中作业是安全可靠的。
【期刊名称】《上海船舶运输科学研究所学报》【年(卷),期】2011(034)002【总页数】5页(P99-102,145)【关键词】运动幅值;横摇;阻尼系数;惯性半径【作者】陈亮;张城;张小雅【作者单位】沪东中华造船集团有限公司,上海200135;沪东中华造船集团有限公司,上海200135;上海船舶运输科学研究所,上海200135【正文语种】中文【中图分类】U661.320 引言起重船作业过程是一个极其复杂的过程,在短时间内吊数千吨重物,按中国船级社规范,吊重的重心要算在吊钩以上的滑轮轴上,该点距水面上百米,使全船的重心瞬间提高。
全船的横摇惯性半径及浮态都会发生变化。
以1 600 t起重船作业工况为例(艉吊1 600 t、吊钩幅度28 m),研究其运动规律。
海上浮式结构物的模糊运动响应分析初探
海上浮式结构物的模糊运动响应分析初探
陈宝锋;聂柱中;沈昌礼;戴秋萍
【期刊名称】《国防交通工程与技术》
【年(卷),期】2008(006)004
【摘要】为进一步客观反映海上浮式结构在波浪中的运动响应,对其进行不确定性分析特别是模糊运动响应分析是十分必要的.运用模糊统计方法,并结合试验分析了波浪载荷及系泊约束的模糊性,对系泊结构的系统模糊性进行了初步描述,推导了相应的模糊运动方程.研究表明,模糊性因素的存在,按传统的确定性算法难以准确反映结构的真实受力及运动情况,先将波浪载荷等输入模糊化后再求解方程并结合试验数据综合确定系统的受力和运动,这是目前较有效的改进方法.
【总页数】5页(P24-28)
【作者】陈宝锋;聂柱中;沈昌礼;戴秋萍
【作者单位】驻江苏省航务军事代表办事处,江苏,南京,210004;驻江苏省航务军事代表办事处,江苏,南京,210004;军事交通学院军事交通系,天津,300161;河海大学水利水电工程学院,江苏,南京,210098
【正文语种】中文
【中图分类】U661.3
【相关文献】
1.海上浮式风机运动对风机结构载荷影响研究 [J], 李嘉文;唐友刚;曲晓奇
2.基于CFD流固耦合理论的海上浮式结构物水动力性能分析 [J], 马哲;程勇;翟钢
军
3.超大型海上浮式结构物连接器基座强度分析 [J], 李良碧;李嘉宾;董佳欢;贾倩倩;顾海英;汤明刚;罗广恩
4.大型围圈型浮式结构物的波浪运动响应分析 [J], 李维;周利兰;吴卫国
5.大型海上浮式结构物环境影响分析及生态保护建议 [J], 杜尊峰;刘治余;赵羿羽;侯思微;于涛
因版权原因,仅展示原文概要,查看原文内容请购买。
规则波作用下起重船吊重动力学仿真
规则波作用下起重船吊重动力学仿真
王学林;尤心一;胡于进
【期刊名称】《中国机械工程》
【年(卷),期】2010(021)009
【摘要】在考虑吊重空间摆动和船体运动的耦合以及流体动力学效应、波浪力、锚索的非线性恢复力等条件下,建立了锚泊起重船动力学模型.分析了起重船在规则渡作用下吊重的摆动特征,当外部波浪频率趋近于吊重特征频率时,吊重会发生大的晃动.比较了船舶在理想简谐运动条件下与在规则波条件下吊重的摆动特征.分析结果表明:作用在船体上的非线性载荷对船舶和吊重的运动影响比较明显.
【总页数】6页(P1077-1082)
【作者】王学林;尤心一;胡于进
【作者单位】华中科技大学,武汉,430074;华中科技大学,武汉,430074;华中科技大学,武汉,430074
【正文语种】中文
【中图分类】TH113.1
【相关文献】
1.起重船重吊系固系统结构设计 [J], 雷夕勇
2.桥式起重机吊重偏摆系统的动力学仿真 [J], 薛伟;万雷
3.不同吊重下大型回转式起重船的系泊计算 [J], 孙华峰; 董振强
4.规则波作用下海上无人艇防摆吊艇回收系统仿真 [J], 冯振威;魏绍亮
5.吊重吊高能力第一综合作业能力第一 1500t深潜坐底起重船建造合同签约迎来八方宾客 [J], 秦尧
因版权原因,仅展示原文概要,查看原文内容请购买。
浮基两刚体模型强迫振动动力响应分析
浮基两刚体模型强迫振动动力响应分析王丙;江召兵;陈徐均;黄亚新【摘要】为分析浮基在外力作用下产生的强迫振动对浮基多体系统动力响应影响,将浮基多体系统简化为光滑铰接的两刚体模型,用多体动力学离散时间传递矩阵理论,并编写程序对浮基多体系统动力响应求解。
分别计算浮基在周期横摇角强迫振动与波浪作用下浮基两刚体动力响应,获得浮基两刚体系统运动响应曲线。
数值模拟结果表明,当横摇角强迫振动幅值、频率增加时,起吊重物的摆动更剧烈,绳索长度变化对重物摆动影响不大。
在横向规则波作用下,浮基与重物的摆动幅值随绳索长度、吊臂仰角的增加而增大,随起吊重物质量变化先增大后减小。
%In order to analyze the influence of forced vibration on dynamic responses of a multi-body system with floating base,the system was simplified into a two rigid-body model connected by smooth joint.The dynamic responses ofthe system were solved by using the transfer matrix theory of multi-body dynamics.The time histories of motion of the system were obtained under the condition of the floating base acted by forced periodic rolling motionor waves.The results of numerical simulation show that the swing of the lifted weight becomes severe with the increase of amplitude and frequency of the forced vibration,but is not influenced by the length variation of the rope.The oscillation amplitudes of the floating base and the lifted weight under the action of transverse regular wave increase with the increase of the rope length and arm elevation.【期刊名称】《振动与冲击》【年(卷),期】2014(000)002【总页数】6页(P168-172,177)【关键词】浮基两刚体系统;传递矩阵;强迫振动;动力响应【作者】王丙;江召兵;陈徐均;黄亚新【作者单位】解放军理工大学野战工程学院,南京 210007;解放军理工大学野战工程学院,南京 210007; 上海交通大学船舶海洋与建筑工程学院,上海 200240;解放军理工大学野战工程学院,南京 210007;解放军理工大学野战工程学院,南京 210007【正文语种】中文【中图分类】U661.3浮基两刚体系统为最简单的浮基多体系统。
波浪下“蓝鲸”号起重船系泊吊装组块耦合运动响应
波浪下“蓝鲸”号起重船系泊吊装组块耦合运动响应朱绍华;于文太;李广帅;季红叶;谢芃;骆寒冰【摘要】采用水池模型试验和数值模拟方法,对“蓝鲸”号大型起重船吊装海洋平台上部组块的过程开展运动响应研究,对比分析无吊物和吊物施工时的运动结果,两者吻合较好,讨论在顶浪规则波工况下该复杂耦合系统的运动响应特性.研究结果揭示在波浪中系泊起重吊装组块耦合运动机理,为海洋平台吊装施工作业提供技术支持.【期刊名称】《中国海洋平台》【年(卷),期】2019(034)001【总页数】5页(P53-57)【关键词】起重船;吊装作业;耦合运动响应;模型试验;数值模拟【作者】朱绍华;于文太;李广帅;季红叶;谢芃;骆寒冰【作者单位】海洋石油工程股份有限公司,天津300461;海洋石油工程股份有限公司,天津300461;海洋石油工程股份有限公司,天津300461;天津大学建筑工程学院,天津300350;天津大学建筑工程学院,天津300350;天津大学建筑工程学院,天津300350【正文语种】中文【中图分类】U664.40 引言在系泊起重船吊装海洋平台大型上部组块时,现场风、浪、流等海洋环境条件复杂。
如果上部组块运动幅度较大,其将不能被正常安装到导管架上,影响现场施工进度。
在严重情况下,剧烈的组块运动会威胁海洋平台结构物和现场施工人员的安全。
随着需吊装的上部组块质量的逐渐提高,合理分析预报施工时吊物的运动响应,可有效指导现场安装作业,提高作业效率及安全性。
开展波浪下系泊起重船与吊物的耦合运动研究具有重大的理论意义和工程应用价值。
近年来国内专家学者对起重船-吊物系统的耦合运动做了一定的研究工作。
董艳秋等[1]研究起重船在波浪中作业时吊物系统的动力响应,建立在起吊过程中重物运动的非线性微分方程,采用新切片理论在频域内得到船体的运动,用Runge-Kutta方法在时域内求得重物在空间的动力响应和吊索的动张力。
汪娟娟等[2]利用 MOSES 计算软件,分析船舶-吊物耦合系统的运动特性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
a n g l e , t h e w a v e — l e n th g ,t h e wa v e - h e i g h t a n d t h e w e i g h t a l l h a v e a n i lu f n e n c e o n t h e r o l l o f c r a n e - s y s t e m
第 1 8卷 第 1 - 2期 2 0 1 4年 2月
文 章 编 号 :1 0 0 7 — 7 2 9 4 ( 2 0 1 4 ) 0 1 — 0 0 6 8 — 0 7
船 舶力
J o u r n a l o f S h i p Me c h a n i c s
Vo 1 . 1 8 No . 1 — 2 F e b . 2 0 1 4
W ANG B i n g , C HE N Xu - j , J  ̄ A NG Z h a o - b i n g , HU AN G Y a - x i n
( 1 C o l l e g e o f F i e l d E n g i n e e i r n g , P I J A U n i v . o f S c i . &T e c h . , N a n j i n g 2 1 0 0 0 7 , C h i n a ; 2 S c h o o l o f N a v a l A r c h i t e c t u r e ,
~
o f r o l l a n d p i t c h we r e o b t a i n e d t h r o u g h r e l e v a n t t e s t s o n t h e mo d e l s y s t e m. T h e r e s u l t s s h o w t h a t t h e b o o m
浮基起重 系统在规则 波 中的运动 响应 试验及分 析
王 丙 ,陈徐均 ,江召兵 , 一 , 黄亚新
( 1解 放 军 理 工 大学 野 战工 程 学 院 , 江苏 南京 2 1 0 0 0 7 ; 2上 海 交 通 大学 船 舶 海 洋 与 建 筑 工程 学 院 , 上海 2 0 0 2 4 0 ) 摘要: 为 了检 验 吊臂 夹 角 、 波长、 波 高 及 重 物 对 浮 基 起 重 系统 运 动 响 应 的 影 响 , 设 计 了浮 基 起 重 系 统 模 型 , 并 开 展 了相 关 试 验 研 究 , 得 到 了浮 基起 重 系统 在 各 种 工 况 下 横 摇 和 纵 摇 的 时 间历 程 曲线 。 结果表 明, 吊臂 夹 角 、 波长、 波 高及 重 物 对 浮 基 起 重 系统 的横 摇 均 有 不 同程 度 的 影 响 。总 的来 说 , 当 吊臂 与 重 物 在 浮 基 中纵 剖 面 内且 同 波 向 平行 时( 即 吊臂 夹角 为 9 0 。 ) , 波 浪及 重 物 对 系 统 纵 摇 影 响 最 大 , 对 横 摇 影 响最 小 , 系 统 比较 平 稳 ; 当 吊臂 与重 物 在 浮 基 中 横 剖 面 内且 同 波 向 平 行 时 ( 即 吊臂 夹 角 为 0 。 或 1 8 0 。 ) , 波浪及重物对 系统纵摇影 响最小 , 对 横 摇 影 响 最 大, 系统横摇剧烈。 因此 , 当浮 基 起 重 系 统 进 行作 业 时 , 应 当控 制 吊臂 夹 角 与 波 向角 对 系统 运 动 的合 成 影 响 , 以提 高 浮基 起 重 系统 作 业 的 稳定 性 和安 全 性 。 关键词 : 浮 基 起重 系统 ;运 动 响应 ; 横 摇 中 图分 类号 : U 6 6 1 . 7 1 文献标识码 : A d o i : 1 0 . 3 9 6 9  ̄ . i s s n . 1 0 0 7 — 7 2 9 4 . 2 0 1 4 . h i . 0 0 9
O c e a n&C i v i l E n g i n e e i r n g , S h a n g h a i J i a o T o n g U n i v e r s i t y , S h a n g h a i 2 0 0 2 4 0 , C h i n a )
Te s t a n d a n a l y s i s o n mo t i o n r e s p o n s e s o f c r a n e - s y s t e m wi t h a lo f a t i n g b a s e i n r e g u l a r wa v e s