图象分割简述及动态阈值分割法
动态差分阈值法
动态差分阈值法动态差分阈值法是一种广泛应用于图像处理和计算机视觉领域的算法。
该算法通过调整阈值来实现对图像中物体的分割,以消除背景噪声和平滑轮廓。
下面将分步骤介绍该算法的实现过程。
第一步:灰度化灰度化是将图像从RGB颜色空间转换到灰度颜色空间的过程。
该过程使得算法处理的图像数据量更小,并且在保留有用信息的同时,可以减少数据维度。
在该算法的实现中,使用的是加权平均法,即将RGB三个通道的像素值加权平均,得到图像的灰度值。
第二步:滤波处理滤波处理是为了去除图像中的噪声和过度平滑的像素。
在动态差分阈值法中,使用的是高斯滤波器,它通过叠加多个高斯函数来平滑图像,并在保留边缘信息的同时,消除高频噪声。
对于一般情况,高斯滤波器的大小视图像的分辨率而定。
第三步:求取差分差分操作是该算法的关键步骤之一。
该步骤通过计算像素与相邻像素的差异值来确定图像中的边缘位置。
在动态差分阈值法中,使用的是一阶差分算子,在计算差分过程中,需要保证差分结果的有效性,即排除噪声的干扰。
第四步:动态阈值处理动态阈值处理是根据图像的差分值来进行分割处理的过程,该过程的目的是去除噪声和保留有限的边缘信息。
在动态差分阈值法中,采用的是一种自适应线性阈值化算法,通过设置参数来调整阈值的大小,从而实现对图像的自适应分割。
第五步:二值化最后一步是将阈值化后的图像进行二值化,即将阈值化后的像素按照设定的阈值进行二进制划分。
该过程通常涉及到的计算能力较小,因此算法的速度会比较快。
综上所述,动态差分阈值法在图像分割中发挥了重要的作用。
该算法的实现过程相对简单,通过灰度化、滤波处理、差分计算、动态阈值处理和二值化处理五个步骤,就能够得到一幅满足分割要求的二值化图像。
该算法在很多场合下都得到了广泛的应用,包括检测人脸、检测车辆等。
MedicalImage8医学图像分割(阈值分割)
目标
背景
Z T T+△T
5
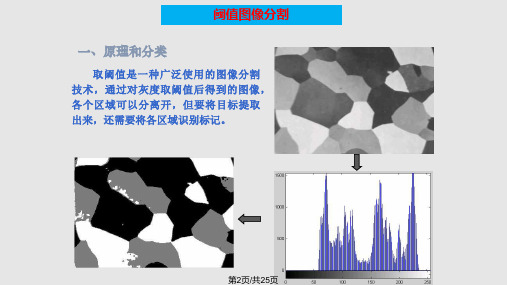
4.4.1 阈值分割法原理
最简单的利用取阈值方法来分割灰度图像的步 骤如下。首先对1幅灰度取值在gmin和gmax之间的 图像确定一个灰度阈值T(gmin < T < gmax),然 后将图像中每个象素的灰度值与阈值T相比较, 并将对应的象素根据比较结果(分割)划为2类: 象素的灰度值大于阈值的为1类,象素的灰度值 小于阈值的为另1类。这2类象素一般对应图像 中的2类区域。
28
灰度值和梯度值散射图(2-D直方图)见下图。1个轴是 灰度值轴,1个轴是梯度值轴。散射图中一般会有2个接 近灰度值轴(低梯度值)但沿灰度值轴又互相分开一些 的大聚类,它们分别对应目标和背景内部的象素。散射 图中还会有较少的对应目标和背景边界上象素的点。这 些点的位置沿灰度值轴处于前2个聚类中间,但由于有较 大的梯度值而与灰度值轴有一定的距离。
f '(x)
边界象素 背景象素 0 目标象素 f (x)
29
作业
1、一幅图像背景部分的均值为25,方差为 625,在背景上分布着一些互不重叠的均值 为150,方差为400的小目标。设所有目标合 起来约占图像总面积的20%,提出1个基于 取阈值的分割算法将这些目标分割出来。
返回
30
2、Suppose that an image has the gray-level probability density function shown as following. Here P1(z) corresponds to objects and P2(z) corresponds to the background. Assume that P1=P2 and find the optimal threshold between object and background pixel.
阈值分割学习.pptx
o )
P
P1(Z)
E1(Zt)
P2(Z) E2(Zt)
Zt
Z
从前面可以看出,假如:
① 图像的目标物和背景象素灰度级概率呈正态分布,
② 且偏差相等(σ12 = σ22), ③ 背景和目标物象素总数也相等(θ=1/2),
则这个图像的最佳分割阈值就是目标物和背景象素灰度级
两个均值的平均。
第16页/共25页
Otsu法是一种使类间方差最大的自动确定阈值的方法,该方法具有 简单、处理速度快的特点。
Otsu法阈值分割的基本思想是:
设图像像素为N,灰度范围为[0,L-1],对应灰度级i的像
素为ni,概率为: pi ni / N
选定阈值T把图像中的像素分成两个灰度级C0和C1,C0由灰度值在
[0,T]之间的像素组成,C1由灰度值在[T+1,L-1]之间的像素组成,由
T
第9页/共25页
2.迭代阈值选择
迭代阈值选择方法的基本思想是:
开始时选择一个阈值作为初始估计值,然后按照某种策略不断的改进 这一估计值,直到满足给定的准则为止。 迭代阈值选择方法的步骤:
1. 选择一个初始估计值T(建议初始估计值为图像中最大亮度值和最 小亮度值的中间值)。
2. 使用T分割图像。这会产生两组像素:亮度值≥T的所有像素组成 的G1,亮度值<T的所有像素组成的G2。
灰度分布概率,整个图像的均值为:T
L 1
i pi
i0
C0和C1的均值为:0
T i0
ipi
0
1Байду номын сангаас
L1 ipi
iT 1
1
其中:
T
0 pi i0
L1
图像分割方法

图像分割方法图像分割是计算机视觉领域中的一个重要问题,它旨在将图像分成具有语义信息的区域。
图像分割在许多应用中都扮演着重要的角色,比如医学图像分析、自动驾驶、图像检索等。
针对不同的应用场景,有多种图像分割方法被提出并应用于实际问题中。
本文将介绍几种常见的图像分割方法,并对它们的原理和特点进行简要的分析。
1. 阈值分割。
阈值分割是一种简单而有效的图像分割方法。
其基本思想是将图像的灰度值按照设定的阈值进行划分,从而将图像分成不同的区域。
对于灰度图像,可以根据像素的灰度值与设定的阈值进行比较,将像素分为目标和背景两类。
阈值分割方法简单易行,但对光照变化和噪声敏感,对于复杂背景和多目标分割效果有限。
2. 边缘检测分割。
边缘检测分割是一种基于图像边缘信息的分割方法。
其基本思想是利用图像中目标与背景之间的边缘信息进行分割。
常用的边缘检测算子有Sobel、Prewitt、Canny等。
通过检测图像中的边缘信息,可以将图像分成具有明显边界的区域。
边缘检测分割方法对光照变化和噪声具有一定的鲁棒性,但在边缘连接处容易出现断裂和断点。
3. 区域生长分割。
区域生长分割是一种基于像素生长的分割方法。
其基本思想是从种子点开始,根据一定的生长准则逐步将与种子点相邻且满足条件的像素加入到同一区域中,直到满足停止准则为止。
区域生长分割方法适用于具有明显区域特征的图像,对于光照变化和噪声具有一定的鲁棒性,但对于种子点的选择和生长准则的确定比较敏感。
4. 基于深度学习的分割方法。
随着深度学习技术的发展,基于深度学习的图像分割方法逐渐成为研究热点。
深度学习模型如FCN、U-Net等在图像分割领域取得了显著的成果。
这些方法利用卷积神经网络对图像进行端到端的学习,能够有效地提取图像的语义信息,对于复杂背景和多目标分割效果较好。
总结。
图像分割是计算机视觉领域中的重要问题,有许多方法可以用来实现图像分割。
不同的方法适用于不同的应用场景,具有各自的特点和局限性。
图像分割的常用方法

图像分割的常用方法
1. 阈值分割:根据像素灰度值与预设阈值之间的大小关系将图片分成黑白两个部分,常用于二值化处理。
2. 区域生长:利用像素之间的空间连通关系,从种子像素开始,将与其相邻的像素逐步合并成同一个区域。
3. 全局图像分割:将图像分成多个颜色或灰度级别,然后根据图像亮度、颜色、纹理、空间信息等特征进行分类,常用于分类、检测、识别等任务。
4. 模型分割:使用先前训练好的模型对图像分类和分割。
例如,利用卷积神经网络(CNN) 对图像进行分类和分割。
5. 基于图的分割:将图像转换成图形结构,建立节点之间的连接关系,通过图形算法对图形进行分割。
6. 边缘检测:检测图像中的边缘线条并将其分割出来,常用于目标检测和识别。
7. 水平集分割:该方法使用曲线(水平集) 对图像进行分割,可以在不同曲线之间自由地移动,因此在较复杂的图像中可以得到更好的分割效果。
阈值分割算法

阈值分割算法
阈值分割算法,指的是一种实现图像分割的算法。
其基本思想是将图
像中的像素按照其灰度值进行分类,利用不同的阈值进行分割,从而
实现对图像的分割。
阈值分割算法常用于图像处理中的目标检测、图
像增强、图像分割等领域。
阈值分割算法具体操作流程如下:
1. 首先将图像灰度化,即将图像中的每个像素转换为对应的灰度值。
2. 对于二值图像,阈值一般取128;对于灰度图像,可使用大津法等方法得到最佳阈值。
3. 对于RGB图像,需要先将其转换为灰度图像后再进行阈值分割。
4. 根据设定的阈值,将灰度图像中的像素分为两类,一类是大于或等
于阈值的像素点,另一类是小于阈值的像素点。
这就实现了图像的分割。
5. 分割后的图像,可以根据需要进行后续处理,如二值化、图像去噪、形态学处理等。
阈值分割算法在实际应用中广泛使用,其优点在于简单易懂、计算量小、可高效实现。
同时,该算法在多个领域都有应用,如医学图像分割、海洋遥感图像分割等。
总之,阈值分割算法是一种在图像处理领域应用广泛的算法。
能够实现图像的快速分割,并可根据需求进行后续处理。
图像分割算法的原理与效果评估方法
图像分割算法的原理与效果评估方法图像分割是图像处理中非常重要的一个领域,它指的是将一幅图像分割成多个不同的区域或对象。
图像分割在计算机视觉、目标识别、医学图像处理等领域都有广泛的应用。
本文将介绍图像分割算法的原理以及评估方法。
一、图像分割算法原理图像分割算法可以分为基于阈值、基于边缘、基于区域和基于图论等方法。
以下为其中几种常用的图像分割算法原理:1. 基于阈值的图像分割算法基于阈值的图像分割算法是一种简单而高效的分割方法。
它将图像的像素值进行阈值化处理,将像素值低于阈值的部分归为一个区域,高于阈值的部分归为另一个区域。
该算法的优势在于计算速度快,但对于复杂的图像分割任务效果可能不理想。
2. 基于边缘的图像分割算法基于边缘的图像分割算法通过检测图像中的边缘来实现分割。
常用的边缘检测算法包括Sobel算子、Canny算子等。
该算法对边缘进行检测并连接,然后根据连接后的边缘进行分割。
优点是对于边缘信息敏感,适用于复杂场景的分割任务。
3. 基于区域的图像分割算法基于区域的图像分割算法将图像分割成多个区域,使得每个区域内的像素具有相似的属性。
常用的方法包括区域生长、分裂合并等。
该算法将相邻的像素进行聚类,根据像素之间的相似度和差异度进行分割。
优点是在复杂背景下有较好的分割效果。
4. 基于图论的图像分割算法基于图论的图像分割算法将图像看作是一个图结构,通过图的最小割分割图像。
常用的方法包括图割算法和分割树算法等。
该算法通过将图像的像素连接成边,将图像分割成多个不相交的区域。
该算法在保持区域内部一致性和区域间差异度的同时能够有效地分割图像。
二、图像分割算法的效果评估方法在进行图像分割算法比较和评估时,需要采用合适的评估指标。
以下为常用的图像分割算法的效果评估方法:1. 兰德指数(Rand Index)兰德指数是一种常用的用于评估图像分割算法效果的指标。
它通过比较分割结果和真实分割结果之间的一致性来评估算法的性能。
图像分割中的阈值算法
图像分割中的阈值算法随着计算机技术的不断发展和普及,图像处理技术已经成为现代科学研究和生产活动中必不可少的一项重要内容。
而图像分割是图像处理中的一个重要领域,它是指将一幅图像分成若干个离散的区域,每个区域内具有相似的属性。
而阈值算法是实现图像分割的一种基本方法,下面我们就来仔细探究一下阈值算法在图像分割中的应用。
一、阈值算法的原理在进行阈值分割时,需要确定一个阈值t,把图像分成两个部分:小于t的部分和大于等于t的部分。
在分割后的图像中,小于t的部分被归为一类,大于等于t的部分被归为另一类。
阈值算法根据图像的灰度值来确定阈值t,主要通过区分图像的背景和前景,将原始图像进行简单的二元操作。
而对于彩色图像,需要将其转化成灰度图像,再进行阈值处理。
二、阈值算法的实现过程阈值算法通常可以分为两类:全局阈值方法和局部阈值方法。
全局阈值方法指在整幅图像上进行统一的阈值处理,而局部阈值方法则是根据图像中相邻像素之间的关系设置不同的阈值。
(一)全局阈值方法在全局阈值方法中,首先需要确定阈值t,常见的方法有以下两种:1. 直方图法:通过统计像素点灰度值的分布情况来确定阈值t。
一般情况下,图像中的背景和前景值具有比较大的差异,因此,阈值t一般是两者之间的一个最小值。
2. Otsu法:是一种非常流行的用于确定全局阈值的方法。
Otsu法从整幅图像的直方图中查找分布最大的极值点,通过寻找这个极值点,将图像分成前景和背景两个部分。
确定了阈值t之后,可以进行如下的二元操作:1. 当像素的值小于阈值t时,该像素被划分为背景,用0表示。
2. 当像素的值大于等于阈值t时,该像素被划分为前景,用1表示。
(二)局部阈值方法局部阈值方法通过考虑图像中相邻像素之间的关系,来确定像素的阈值。
主要有以下两种方法:1. 局部固定阈值法:在该方法中,将一定大小的像素块作为整体,针对每个像素块进行阈值处理。
这种方法的优点是能够适应光线不均匀以及图像噪声的情况。
医疗影像处理中的图像分割算法使用方法
医疗影像处理中的图像分割算法使用方法在医疗影像处理领域,图像分割是一种非常重要的技术,它可以将医学图像中的目标或感兴趣区域从背景中分离出来,为医生提供更准确的诊断和治疗信息。
本文将介绍医疗影像处理中常用的图像分割算法及其使用方法。
1. 阈值分割算法阈值分割是最简单直观的图像分割方法之一。
它基于图像中像素灰度值的分布特性,通过设定一个或多个阈值,将像素分为不同的区域。
常见的阈值分割方法有固定阈值法、自适应阈值法和多阈值法等。
固定阈值法是指通过设定一个固定的阈值来将像素分为两个区域,一般选择灰度值在阈值以上的像素为目标区域,阈值以下的像素为背景区域。
自适应阈值法则是基于图像局部灰度分布的统计特性,根据不同区域的灰度分布情况,将局部的阈值设定为不同阈值,从而实现更准确的分割。
多阈值法则是将图像分为多个区域,每个区域对应一个阈值。
通过设置多个阈值,可以分割出更多的目标区域。
2. 基于边缘的分割算法边缘是图像中目标和背景之间的边界,通过检测图像中的边缘信息,可以有效地分割出目标区域。
常用的边缘检测算法有Sobel、Canny、拉普拉斯等。
Sobel算子是一种基于梯度的边缘检测算法。
它通过计算像素点一阶导数的幅值来检测边缘。
Sobel算子在水平和垂直两个方向上计算梯度,并将两个方向上的梯度合并得到最终的边缘图像。
Canny算子是一种综合性能比较优秀的边缘检测算法。
它结合了高斯滤波、梯度计算、非极大值抑制和双阈值等步骤,可以更准确地提取出边缘。
拉普拉斯算子是一种基于二阶导数的边缘检测算法。
它通过计算像素点的二阶导数的值来检测边缘。
拉普拉斯算子对图像中的高频部分比较敏感,能够提取出边缘的细节信息。
3. 基于区域的分割算法基于区域的分割算法是将图像分为多个区域,每个区域具有相似的特性。
常用的基于区域的分割算法有区域生长、分水岭等。
区域生长算法是一种按照像素灰度值相似性进行分割的方法。
从一个种子像素开始,逐渐将与种子像素相邻的像素加入到目标区域中,直到无法再添加相邻像素为止。
医学图像分割技术的算法原理与优化方法
医学图像分割技术的算法原理与优化方法医学图像分割技术是医学影像处理领域中的一项重要研究内容,它可以将医学图像中的不同组织和结构进行有效的分割,为医生提供准确的诊断和治疗方案。
本文将介绍医学图像分割技术的算法原理和优化方法。
一、算法原理医学图像分割技术的算法原理主要包括基于阈值的分割方法、基于边缘的分割方法和基于区域的分割方法。
1. 基于阈值的分割方法:该方法通过设定一个或多个阈值来将图像中的像素分为不同的类别。
常见的阈值分割方法有全局阈值法、自适应阈值法和多阈值法。
全局阈值法适用于图像中目标和背景的灰度分布明显不同的情况,而自适应阈值法则可以处理灰度分布不均匀的图像。
多阈值法可以将图像分割为多个类别,适用于复杂的图像分割任务。
2. 基于边缘的分割方法:该方法通过检测图像中的边缘信息进行分割。
常见的边缘检测算法有Sobel算子、Canny算子和拉普拉斯算子。
这些算子可以提取图像中的边缘信息,并将其转化为二值图像。
然后可以使用形态学操作对二值图像进行进一步处理,得到最终的分割结果。
3. 基于区域的分割方法:该方法通过将图像分割为不同的区域来实现分割。
常见的基于区域的分割方法有区域生长法、分水岭算法和聚类算法。
区域生长法通过选择种子点,将与种子点相邻的像素进行合并,直到满足预设的停止准则。
分水岭算法基于图像的梯度信息将图像分割为不同的区域。
聚类算法通过将像素聚类到不同的类别,将图像分割为不同的区域。
二、优化方法医学图像分割技术的优化方法主要包括特征选择、图像预处理和模型优化。
1. 特征选择:在医学图像分割任务中,选择合适的特征对于算法的准确性和鲁棒性至关重要。
常见的特征包括灰度特征、纹理特征和形状特征。
通过选择合适的特征,可以提高分割算法的性能。
2. 图像预处理:医学图像通常受到噪声、伪影和低对比度等问题的影响,因此在进行分割之前,需要对图像进行预处理。
常见的预处理方法包括滤波、增强和标准化。
滤波可以降低图像中的噪声,增强可以提高图像的对比度,标准化可以使图像的灰度分布均匀。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
全局阈值法 局部(自适应)阈值法
返回
最优阈值法
模型假设——双峰模型
经典方法:错误率最低 (实质上是等错误率最 低)
拓展:
最小FAR准测 最小FRR准则
返回
局部阈值法
分成两类:
子图像阈值法; 动态阈值法(与坐标相关的阈值)
返回
活动轮廓分割模型
优缺点:
抗噪声性,对图像的局部模糊不敏感等;
图像分割简述
钱晓华
目录
图像分割简述 图像算法简介 图像阈值法 分割方法应用指导思想 图像分割评价
图像分割简述
什么是图像分割?
把图像分成各具特性区域的技术和过程。
图像分割的重要性 图像分割的研究层次 图像分割的依据
返回
图像理解 图像分析 图像处理
图像分割是图像处理进 行到图像分析的关键步 骤,也是进一步图像理 解的基础。
返回
图像分割评价
客观评价分割效果,指导改进和提高算法性能。
分类:
性能刻划(characterization): 在不同分割中的表现;
性能比较(comparison): 比较不同算法分割给定图 像时的性能比较。
准则:
计算费用(computation cost)
区域间对比度:
GC= f1 f2 f1 f2
分割结果依赖与初始化值
目前工作状态:
基于Wasserstein距离的局部能量分割模型,能够克服灰度不均带来的分割 困难,对无序纹理图像进行成功分割。(电子学报录用)
Fast global minimization model of region-scalable fitting energy, 克服变分 模型的局部最小性,能够快速的分割灰度不均匀的图像。(已投 Electronics Letters )
图像分析
返回
图像分割研究的三个层次: 1. 研究分割技术; 2. 对分割技术进行性能刻划和比较; 3. 对分割评价方法和评价准测进行系统的 研究
返回
图像分割的依据:
1. 基于相邻像素在像素值方面的两个性质— —相似性和不连续性。 2. 按分割依据,算法可以分为基于边缘检测 和基于区域提取两种。
指静脉图像分割对比
(a)
(b)
(c)
(d)
图(a)是指静脉原图像,图(b)是最大类间方差法的分割结果,图(c)是 阈值图像法的分割结果,图(d)是局部能量CV模型的分割结果。
返回
分割方法应用指导思想
没有通用分割理论,针对实际应用问题提出或 选择分割方法;
在方法中融入先验知识; 人机交互; 多方法的综合运用。
A multiphase segmentation model via block processing,提出了多相分割 模型和基于全局属性的分块处理思想。(实验成功,成稿阶段)
基于Wasserstein距离的局部能量快速分割模型,(数学模型建立,编程调 试阶段)
返回
图像阈值法
出处:
控制理论与应用,王科俊等,自动化技术与应用,2005,24(8),19-22. A Study of Hand Vein Recognition Method, Yuhang Ding, Dayan Zh率
, R : 0 , : = Sin
S
分割有效性
: = Sin
SC
其中,S为人工分割真实目标面积;是轮廓C在目标中所围面积;SC是C所围区域 内面积;为无效分割门限参数
返回
并行边界分割技术 串行边界分割技术 串行区域分割技术 并行区域分割技术
返回
并行边界分割技术
并行的进行边缘检测 两个步骤:
1. 检测目标的边界——微分算子 2. 组成目标边界——连接算法 典型边缘检测算子: Sobel, Robert, Canny等。
返回
串行边界分割技术
采用串行的方法对目标边界检测。 步骤
Wang, Proceedings of the IEEE International Conference on Mechatronics & Automation, Canada, July 2005, 2106-2110.
基本原理:
求模板内像素均值,并将它作为模板中心处像素灰度,并将该值存入阈值图像 对应位置。
1. 确定起始点 2. 选择搜索策略,确定先前的结果对选择下一个检测像素和下一
个结果的影响,并根据一定机理依次检测新的边界点 3. 设定终止条件 优缺点: 不会出现伪边界和断边现象,但时间成本高。 典型方法: 边界跟踪、动态规划和曲线拟合等。
返回
并行区域分割技术
阈值化步骤:
确定阈值; 将分割阈值与像素值比较以划分像素。
将模板遍历整个原图像,获得阈值图像所有值。 将原图像与阈值图像逐点比较
边界处理:
认为扩大; 边界区域所含信息量少,忽略。
本质:自适应阈值法。
合成图像实验
第二列是以区域均值为阈值的分割结果,第三列是中值滤波后 的结果;第四列是以区域中值为阈值的分割结果,第五列是其 相应的中值滤波效果。
返回
图像算法简介
1. 经典分割方法 2. 基于变形模型的分割方法 3. 基于模糊集的分割方法 4. 基于统计特性的分割方法 5. 基于形态学的分割方法 6. 基于神经网络的分割方法 7. 基于小波的分割方法 8. 基于遗传算法的分割方法 9. 基于信息论的分割方法
返回
经典分割方法