CCD尺寸测量光学系统设计原理
CCD的基本工作原理
CCD的基本工作原理CCD的基本工作原理CCD(Charged Coupled Device,电荷耦合器件)是由一系列排得很紧密的MOS电容器组成。
它的突出特点是以电荷作为信号,实现电荷的存储和电荷的转移。
因此,CCD工作过程的主要问题是信号电荷的产生、存储、传输和检测[1]。
以下将分别从这几个方面讨论CCD器件的基本工作原理。
1.1 MOS电容器CCD是一种固态检测器,由多个光敏像元组成,其中每一个光敏像元就是一个MOS(金属—氧化物—半导体)电容器。
但工作原理与MOS晶体管不同。
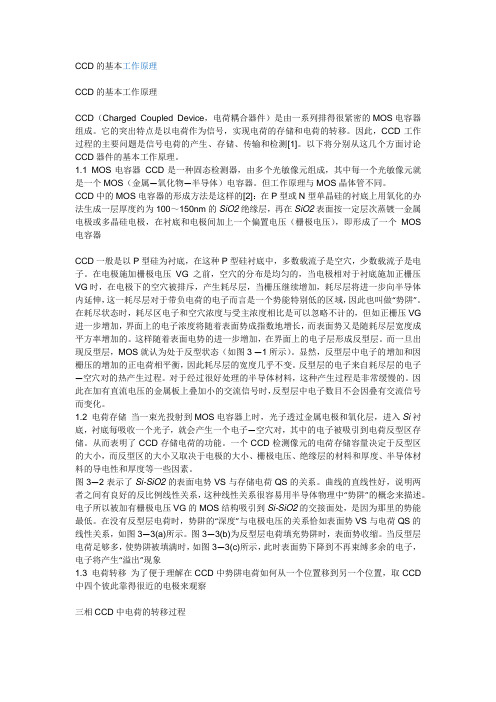
CCD中的MOS电容器的形成方法是这样的[2]:在P型或N型单晶硅的衬底上用氧化的办法生成一层厚度约为100~150nm的SiO2绝缘层,再在SiO2表面按一定层次蒸镀一金属电极或多晶硅电极,在衬底和电极间加上一个偏置电压(栅极电压),即形成了一个MOS 电容器CCD一般是以P型硅为衬底,在这种P型硅衬底中,多数载流子是空穴,少数载流子是电子。
在电极施加栅极电压VG之前,空穴的分布是均匀的,当电极相对于衬底施加正栅压VG时,在电极下的空穴被排斥,产生耗尽层,当栅压继续增加,耗尽层将进一步向半导体内延伸,这一耗尽层对于带负电荷的电子而言是一个势能特别低的区域,因此也叫做“势阱”。
在耗尽状态时,耗尽区电子和空穴浓度与受主浓度相比是可以忽略不计的,但如正栅压VG 进一步增加,界面上的电子浓度将随着表面势成指数地增长,而表面势又是随耗尽层宽度成平方率增加的。
这样随着表面电势的进一步增加,在界面上的电子层形成反型层。
而一旦出现反型层,MOS就认为处于反型状态(如图3 —1所示)。
显然,反型层中电子的增加和因栅压的增加的正电荷相平衡,因此耗尽层的宽度几乎不变。
反型层的电子来自耗尽层的电子—空穴对的热产生过程。
对于经过很好处理的半导体材料,这种产生过程是非常缓慢的。
因此在加有直流电压的金属板上叠加小的交流信号时,反型层中电子数目不会因叠有交流信号而变化。
CCD基本原理解析

Si O2
N+
1
2
62
63
64
P型衬底
CCD芯片的构造
每个光敏元(像 素)对应有三个相 邻的转移栅电极1、 2、3,所有电极彼 此间离得足够近,以 保证使硅表面的耗 尽区和电荷的势阱 耦合及电荷转移。 所有的1电极相连 并施加时钟脉冲 φ1,所有的2、3也 是如此,并施加时钟 脉冲φ2、φ3。这 三个时钟脉冲在时 序上相互交迭。
水平读出寄存器(遮光) 帧转移面阵CCD结构图
帧转移面阵CCD工作过程
优点:电极结构简单,感光区面积可以很小。 缺点:需要面积较大大暂存区。
光敏区
隔列转移面阵CCD结构图
隔列转移面阵CCD工作过程
优:转移效率大大提高。 缺:结构较为复杂。
面阵CCD同时曝光整个图 像
常用面阵CCD尺寸系列
光学系统
CCD
图像处理
一、CCD传感器的基本原理
CCD的最基本单元
MOS电容器是构成CCD 的最基本单元是,它是 金属—氧化物—半导体 (MOS)器件中结构最 为简单的。
金属电极 氧化物
半导体
MOS电容器
1、信号电荷的产生
CCD 工 作 过 程 的 第 一 步 是 电 荷 的 产 生 。 CCD可以将入射光信号转换为电荷输出,依据 的是半导体的内光电效应(也就是光生伏特效 应)。
当向SiO2表面的电极加正偏压时,P型硅 衬底中形成耗尽区(势阱),耗尽区的深度随
正偏压升高而加大。其中的少数载流子(电子)
被吸收到最高正偏压电极下的区域内(如图中
Ф1极下),形成电荷包(势阱)。对于N型硅 衬底的CCD器件,电极加正偏压时,少数载流 子为空穴。
Gi 输入
N+
利用线阵 CCD 进行物体外形尺寸的测量

实验十二利用线阵C CD 进行物体外形尺寸的测量一、实验目的通过本实验掌握利用线阵C CD 进行非接触测量物体尺寸的基本原理和方法,用实例探讨影响测量范围、测量精度的主要因素,为今后设计提供重要依据。
二、实验准备内容1. 利用线阵C CD 进行非接触测量物体尺寸的基本原理线阵C CD 的输出信号包含了C CD 各个像元所接收光强度的分布和像元位置的信息,使它在物体尺寸和位置检测中显示出十分重要的应用价值。
CCD 输出信号的二值化处理常用于物体外形尺寸、物体位置、物体震动(振动)等的测量。
如图3-1 所示为测量物体外形尺寸(例如棒材的直径D)的原理图。
将被测物体 A 置于成像物镜的物方视场中,将线阵C CD 像敏面恰好安装在成像物镜的最佳像面位置上。
当被均匀照明的被测物体A通过成像物镜成像到C CD 的像敏面上时,被测物体像黑白分明的光强分布使得相应像敏单元上存储载荷了被测物尺寸信息的电荷包,通过C CD 及其驱动器将载有尺寸信息的电荷包转换为如图3 -1右侧所示的时序电D = D' / β显然,只要求出D' ,就不难测出物体A的实际尺寸D。
(3-1)线阵CCD 的输出信号U O 随光强的变化关系为线形的,因此,可用U O 模拟光强分布。
采用二值化处理方法将物体边界信息(图3-1 中的N1 与N2)检测出来是简单快捷的方法。
有了物体边界信息便可以进行上述测量工作。
2. 二值化处理方法图3-2 所示为典型CCD 输出信号与二值化处理的时序图。
图中F C 信号为行同步脉冲,FC 的上升沿对应于C CD 的第一个有效像元输出信号,其下降沿为整个输出周期的结束。
U G 为绿色组分光的输出信号,它为经过反相放大后的输出电压信号。
为了提取图3-2 所示U G 的信号所表征的边缘信息,采用如图3-3 所示的固定阈值二值化处理电路。
该电路中,电压比较器 L M393 的正输入端接 C CD 的输出信号 U G ,而反相输入端接到由 电位器 R 2 的动端,产生的可调的阈值电平,可以通过调节电位器对阈值电平进行设置, 构成固定阈值二值化电路。
线阵CCD测量玻璃管内外径原理(NUC)

目录绪论---------------------------------------------------------------------1页1.课程设计的目的--------------------------------------------------1页2. 课程设计的意义-------------------------------------------------1页3. 课程设计的任务及要求----------------------------------------1页一、CCD的基本工作原理-------------------------------------------2页二、利用线阵CCD进行玻璃管外径尺寸测量的测量方法---3页三、光学系统的选型说明------------------------------------------4页1、CCD的选择具有采样保持输出电路的线阵TCD1500C----4页2、光源及成像物镜选择--------------------------------------------6页3、线阵CCD的拼接技术--------------------------------------------7页四、石英玻璃管参数测量的设计原理---------------------------9页五、CCD用于玻璃管尺寸测量的原理---------------------------10页六、测量仪的设计原理---------------------------------------------11页总结---------------------------------------------------------------------13页参考资料---------------------------------------------------------------14页绪论1.课程设计的目的CCD自问世以来,以它无与伦比的优越性能和诱人的应用前景,引起的各国科学家的高度重视,许多发达国家不惜重金投资加速研制,加之微细加工技术的进展,使得CCD像素数剧增,分辨率,灵敏度大幅提高,发展速度惊人。
CCD

1、HAD感测器
HAD(HOLE-ACCUMULATION DIODE)传感器是在N型基板,P型,N+2极体的表面上,加上正孔蓄积层,这是 SONY独特的构造。由于设计了这层正孔蓄积层,可以使感测器表面常有的暗电流问题获得解决。另外,在N型基 板上设计电子可通过的垂直型隧道,使得开口率提高,换句话说,也提高了感度。
背景介绍
背景介绍
CCD广泛应用在数码摄影、天文学,尤其是光学遥测技术、光学与频谱望远镜和高速摄影技术,如Lucky imaging。CCD在摄像机、数码相机和扫描仪中应用广泛,只不过摄像机中使用的是点阵CCD,即包括x、y两个方 向用于摄取平面图像,而扫描仪中使用的是线性CCD,它只有x一个方向,y方向扫描由扫描仪的机械装置来完成 。
CCD在摄像机里是一个极其重要的部件,它起到将光线转换成电信号的作用,类似于人的眼睛,因此其性能 的好坏将直接影响到摄像机的性能。
衡量CCD好坏的指标很多,有像素数量,CCD尺寸,灵敏度,信噪比等,其中像素数以及CCD尺寸是重要的指 标。像素数是指CCD上感光元件的数量。摄像机拍摄的画面可以理解为由很多个小的点组成,每个点就是一个像 素。显然,像素数越多,画面就会越清晰,如果CCD没有足够的像素的话,拍摄出来的画面的清晰度就会大受影 响,因此,理论上CCD的像素数量应该越多越好。
主要指标
CCD尺寸,亦即摄像机靶面。原多为1/2英寸,日前1/3英寸的已普及化,1/4英寸和1/5英寸也已商品化。
CCD像素,是CCD的主要性能指标,它决定了显示图像的清晰程度,分辨率越高,图像细节的表现越好。CCD 是由面阵感光元素组成,每一个元素称为像素,像素越多,图像越清晰。日前市场上大多以25万和38万像素为划 界,38万像素以上者为高清晰度摄像机。
ccd尺寸测量原理

ccd尺寸测量原理
CCD(Charge-Coupled Device)尺寸测量原理主要基于CCD
相对于被测物体的像素数量,从而获得物体的尺寸信息。
CCD是一种光敏器件,由一系列的电荷耦合元件组成。
CCD尺寸测量的基本原理如下:
1. 光信号转换:被测物体发出的光线经过透镜组成的光学系统,聚焦于CCD上。
CCD的表面被分成许多像素,每个像素都能
感受到光信号。
2. 光电转换:光线照射到CCD的像素上后,光子会激发出一
定数量的电子,这些电子将被捕获并存储在每个像素中。
其存储结构使得电子的容量直接对应于光照强度。
3. 电荷传输:CCD中的电子由引导栅极依次传输至输出端,
并通过逐行或逐列传输的方式移动,最终被读取出来。
4. 电子读取:读出电路将CCD中存储的电子转换为电压信号,然后进行放大和采样,最终获得数字信号。
基于以上原理,可以通过以下步骤进行CCD尺寸测量:
1. 设置测量参数:确定测量的像素范围、采样频率和曝光时间等参数。
2. 图像采集:将被测物体放置在CCD系统下,经光学系统形
成被测物体的像,通过触发信号启动CCD系统进行图像采集。
3. 图像处理:通过图像处理算法,对采集到的图像进行处理,如灰度化、边缘检测等。
4. 尺寸测量:基于图像处理结果,通过像素数量和已知比例关系,计算出被测物体的尺寸。
5. 结果输出:将测量结果以数字信号或可视化形式输出,用于后续分析和应用。
需要注意的是,在实际应用中,为了提高测量精度和减小误差,通常还会考虑校准、光照条件控制、采集时间同步等因素。
CCD

CCD,英文全称:Charge-coupled Device,中文全称:电荷耦合元件。
可以称为CCD图像传感器。
CCD是一种半导体器件,能够把光学影像转化为数字信号。
CCD 上植入的微小光敏物质称作像素(Pixel)。
一块CCD上包含的像素数越多,其提供的画面分辨率也就越高。
CCD的作用就像胶片一样,但它是把图像像素转换成数字信号。
CCD上有许多排列整齐的电容,能感应光线,并将影像转变成数字信号。
经由外部电路的控制,每个小电容能将其所带的电荷转给它相邻的电容。
CCD发展史CCD是于1969年由美国贝尔实验室(Bell Labs)的维拉〃波义耳(Willard S. Boyle)和乔治〃史密斯(George E. Smith)所发明的。
当时贝尔实验室正在发展影像电话和半导体气泡式内存。
将这两种新技术结合起来后,波义耳和史密斯得出一种装臵,他们命名为‚电荷‘气泡’元件‛(Charge "Bubble" Devices)。
这种装臵的特性就是它能沿着一片半导体的表面传递电荷,便尝试用来做为记忆装臵,当时只能从暂存器用‚注入‛电荷的方式输入记忆。
但随即发现光电效应能使此种元件表面产生电荷,而组成数位影像。
到了70年代,贝尔实验室的研究员已经能用简单的线性装臵捕捉影像,CCD就此诞生。
有几家公司接续此一发明,着手进行进一步的研究,包括快捷半导体(Fairchild Semiconductor)、美国无线电公司(RCA)和德州仪器(Texas Instruments)。
其中快捷半导体的产品率先上市,于1974年发表500单元的线性装臵和100x100像素的平面装臵。
CCD简介CCD广泛应用在数码摄影、天文学,尤其是光学遥测技术、光学与频谱望远镜,和高速摄影技术如Lucky imaging。
CCD在摄像机、数码相机和扫描仪中应用广泛,只不过摄像机中使用的是点阵CCD,即包括x、y两个方向用于摄取平面图像,而扫描仪中使用的是线性CCD,它只有x一个方向,y方向扫描由扫描仪的机械装臵来完成。
基于线阵CCD扫描的测量技术

在基于机器视觉的零件二维尺寸测量通常采用面阵CCDCCD相机作为图像采集设备,由于面阵CCD相机的像素分辨率较低。使得在测量精度要求较高的场合很难完成测量任务。线阵线阵CCD器件具有空间分辨率高的特点,可以实现高精度测量。近年来,利用线阵CCD进行无接触一维测量已经得到广泛应用。本文提出采用线阵CCD相机对零件进行平行扫描扫描采集零件图像,实现零件二维尺寸的高精度测量。1 线阵CCD扫描测量原理线阵CCD扫描测量系统主要由线阵CCD相机、运动工作台、控制电路及线光源等组成,扫描测量原理。被测零件放置于运动工作台上,随工作台一起以速度v向右方行进,零件未进入相机视场AB时,线光源所发射光线直接通过光学成像系统成为一帧灰度值较高的背景图像,当零件进入相机视场时,零件遮挡光线使得采集图像含有零件轮廓信息,将所有输出图像按采集的先后关系进行拼接,即可得到完整的高分辨率零件图像,通过图像处理得到零件的二维几何尺寸。2 扫描同步控制扫描同步控制是线阵CCD扫描测量零件二维几何尺寸的关键技术,也是影响系统测量精度的最主要因素。所谓扫描同步是指:单位时间内线阵CCD相机所采集图像总和对应的物方实际尺寸与零件的行进速度相同。当扫描同步时,获取的零件图像与实际零件相比没有发生变形,,对其进行处理的结果最接近零件尺寸的真实值;当相机采集速度大于零件行进速度时,零件图像被拉长,,对其进行处理的结果将大于零件尺寸的真实值;当相机采集速度小于零件行进速度时,零件图像被压缩,。对其进行处理的结果小于零件尺寸的真实值。为保证对零件尺寸测量的准确性,需要进行同步控制。线阵CCD的像素尺寸S为14μm×14 μm,线扫描速度vx为500帧/秒,镜头焦距f为50 mm,镜头到零件的距离D为150 mm,则CCD像素所对应的物方尺寸L为:则单位时间内线阵CCD相机所采集图像总和对应的物方实际尺寸(即CCD相机扫描图像速度v)为:在这种情况下,要实现零件扫描同步则要求零件的行进速度为21 mm/s。3 图像处理算法通过以上分析,对系统的运动工作台的行进速度进行严格控制,使之与CCD相机的扫描速度达到很好的同步效果,实际采集零件图像。3.1 图像边缘提取由于需布置光源,而光源随时间会有所衰减。所以对图像采用边缘检测的算法,以减小光源亮度变化对图像检测的影响。要得到图像的轮廓尺寸,边缘检测是测量的基础和关键。由于图像往往含有噪声。而边缘和噪声在空间域都表现为灰度有较大的起落,给边缘提取带来困难。通过仿真比较,最终采用了3*3的平滑算子和抗噪能力较强的sobel检测算子,它对灰度渐变和噪声较多的图像处理效果较好,对边缘定位比较准确,能够满足我们对图像测量的需要。由sobel算子提取被测零件的图像边缘,图像边缘是一条细环,由于图像太大,显示图为33%的缩略图,看起来间断的地方很多,其实是连续的,大部分边是单像素宽,左下角部分400%的显示图。