第2章 时域离散信号和系统的频域分析
合集下载
信号与系统教案第2章
如何求解?
bm f
( m)
(t ) bm1 f
( m1)
ai 、 bj为常数。
2.1 LTI连续系统的响应
经典时域分析方法 y(t ) yh (t ) yp (t ) 卷积法
y(t) = yzi (t) + yzs (t)
一、经典时域分析方法(微分方程经典解)
微分方程的全解即系统的完全响应, 由齐次解 yh(t)和特解yp(t)组成
信号与系统 电子教案
2.2 冲激响应和阶跃响应
2.2
冲激响应和阶跃响应
一、冲激响应
由单位冲激函数δ(t)所引起的零状态响应称为 单位冲激响应,简称冲激响应,记为h(t)。 h(t)=T[{0},δ(t)]
t
h t T 0 , t
def
h t
t
信号与系统 电子教案
第二章 连续系统的时域分析
《信号与系统》
授课教师:吕晓丽
第2-1页
■
长春工程学院电子信息教研室
信号与系统 电子教案
第二节总结
总
结
1、LTI系统的判定方法 线性性质 时不变性质 2、 LTI系统的分类 因果系统 稳定系统 3、系统的描述 系统框图与系统方程
第2-2页
■
长春工程学院电子信息教研室
[例] 已知某二阶线性时不变连续时间系统的动态方程
y" (t ) 6 y' (t ) 8 y(t ) f (t ), t 0
初始条件y(0)=1, y '(0)=2, 输入信号f (t)=et ε(t),求 系统的完全响应y(t)。
解:
(3) 求方程的全解
y (t ) yh (t ) yp (t ) C1e
bm f
( m)
(t ) bm1 f
( m1)
ai 、 bj为常数。
2.1 LTI连续系统的响应
经典时域分析方法 y(t ) yh (t ) yp (t ) 卷积法
y(t) = yzi (t) + yzs (t)
一、经典时域分析方法(微分方程经典解)
微分方程的全解即系统的完全响应, 由齐次解 yh(t)和特解yp(t)组成
信号与系统 电子教案
2.2 冲激响应和阶跃响应
2.2
冲激响应和阶跃响应
一、冲激响应
由单位冲激函数δ(t)所引起的零状态响应称为 单位冲激响应,简称冲激响应,记为h(t)。 h(t)=T[{0},δ(t)]
t
h t T 0 , t
def
h t
t
信号与系统 电子教案
第二章 连续系统的时域分析
《信号与系统》
授课教师:吕晓丽
第2-1页
■
长春工程学院电子信息教研室
信号与系统 电子教案
第二节总结
总
结
1、LTI系统的判定方法 线性性质 时不变性质 2、 LTI系统的分类 因果系统 稳定系统 3、系统的描述 系统框图与系统方程
第2-2页
■
长春工程学院电子信息教研室
[例] 已知某二阶线性时不变连续时间系统的动态方程
y" (t ) 6 y' (t ) 8 y(t ) f (t ), t 0
初始条件y(0)=1, y '(0)=2, 输入信号f (t)=et ε(t),求 系统的完全响应y(t)。
解:
(3) 求方程的全解
y (t ) yh (t ) yp (t ) C1e
数字信号处理西安电子高西全丁美玉第三版课后习题答案全1-7章

=y′(n)
第 1 章 时域离散信号和时域离散系统
故该系统是非时变系统。 因为 y(n)=T[ax1(n)+bx2(n) =ax1(n)+bx2(n)+2[ax1(n-1)+bx2(n-1)] +3[ax1(n-2)+bx2(n-2)] T[ax1(n)]=ax1(n)+2ax1(n-1)+3ax1(n-2) T[bx2(n)]=bx2(n)+2bx2(n-1)+3bx2(n-2)
第 1 章 时域离散信号和时域离散系统
(3) 这是一个延时器, 延时器是线性非时变系统, 下面证明。 令输入为
输出为
x(n-n1)
y′(n)=x(n-n1-n0) y(n-n1)=x(n-n1-n0)=y′(n) 故延时器是非时变系统。 由于
T[ax1(n)+bx2(n)]=ax1(n-n0)+bx2(n-n0) =aT[x1(n)]+bT[x2(n)]
=aT[x1(n)]+mbT0 [x2(n)]
故系统是线性系统。
n
m0
第 1 章 时域离散信号和时域离散系统
(8) y(n)=x(n) sin(ωn)
令输入为
输出为
x(n-n0)
y′(n)=x(n-n0) sin(ωn) y(n-n0)=x(n-n0) sin[ω(n-n0)]≠y′(n) 故系统不是非时变系统。 由于
(5) 画x3(n)时, 先画x(-n)的波形(即将x(n)的波形以纵轴为中心翻转180°), 然后再右移2位, x3(n)波形如题2解图(四)所示。
第 1 章 时域离散信号和时域离散系统
题2解图(一)
第 1 章 时域离散信号和时域离散系统
第 1 章 时域离散信号和时域离散系统
故该系统是非时变系统。 因为 y(n)=T[ax1(n)+bx2(n) =ax1(n)+bx2(n)+2[ax1(n-1)+bx2(n-1)] +3[ax1(n-2)+bx2(n-2)] T[ax1(n)]=ax1(n)+2ax1(n-1)+3ax1(n-2) T[bx2(n)]=bx2(n)+2bx2(n-1)+3bx2(n-2)
第 1 章 时域离散信号和时域离散系统
(3) 这是一个延时器, 延时器是线性非时变系统, 下面证明。 令输入为
输出为
x(n-n1)
y′(n)=x(n-n1-n0) y(n-n1)=x(n-n1-n0)=y′(n) 故延时器是非时变系统。 由于
T[ax1(n)+bx2(n)]=ax1(n-n0)+bx2(n-n0) =aT[x1(n)]+bT[x2(n)]
=aT[x1(n)]+mbT0 [x2(n)]
故系统是线性系统。
n
m0
第 1 章 时域离散信号和时域离散系统
(8) y(n)=x(n) sin(ωn)
令输入为
输出为
x(n-n0)
y′(n)=x(n-n0) sin(ωn) y(n-n0)=x(n-n0) sin[ω(n-n0)]≠y′(n) 故系统不是非时变系统。 由于
(5) 画x3(n)时, 先画x(-n)的波形(即将x(n)的波形以纵轴为中心翻转180°), 然后再右移2位, x3(n)波形如题2解图(四)所示。
第 1 章 时域离散信号和时域离散系统
题2解图(一)
第 1 章 时域离散信号和时域离散系统
系统的频域分析
6 系统的频域分析 p 5
Yzs (jw)= H(jw) F(jw)
Yzs ( jw ) 或 : H ( jw ) H ( jw ) e j (w ) F ( jw )
如果信号不存在傅氏变换时,不可以用频域分析方法。 在本教材中,没有特别提示时,涉及到H(jw) 的求解, 都指满足IR条件的LTI因果系统,即不考虑初始状态的影响, 即满足:
4/RC
w
随着频率的增加,系统的幅度响应|H(jw)|不断减小,说明信号 的频率越高,信号通过该系统的损耗也就越大,即低通。 由于|H(j(1/RC))|=0.707,所以把wc=1/RC称为该系统的3db截频。
6 系统的频域分析 p 13
连续信号通过系统响应的频域分析
在此就是求零状态响应。又称:零状态响应的频域分析法
H ( jw ) FT[h(t )]
1 1 jw 1 jw 2 1 ( jw ) 2 3( jw ) 2
6 系统的频域分析 p 9
例 LTI系统,输入 f(t)=e –t u(t),输出 y(t)= e-tu(t) + e2tu(t) ,求频率响应H(jw)和h(t)。
部分分式展开
1 3( jw ) 3 jw 44 Yzs ( jw ) Fzs ( jw ) H ( jw ) jw ) 22 jw 2 (jw 3 1)((jw )(3 jw 3)
1 -t 5 - 3t - 2t y zs (t ) FT [Yzs ( jw )] [ e 2e - e ]u (t ) 2 2
j wC
由Fourier反变换,得系 统的冲激响应h(t)为:
6 系统的频域分析 p 12
1 -(1 / RC)t h(t ) e u(t ) RC
数字信号处理课后习题答案(全)1-7章
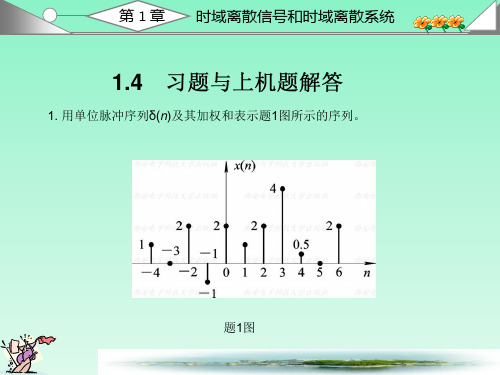
x(n)=-δ(n+2)+δ(n-1)+2δ(n-3)
h(n)=2δ(n)+δ(n-1)+ δ(n-2)
由于
x(n)*δ(n)=x(n)
1
x(n)*Aδ(n-k)=Ax(n-k)
2
故
第 1 章 时域离散信号和时域离散系统
y(n)=x(n)*h(n)
=x(n)*[2δ(n)+δ(n-1)+ δ(n-2) 1 2
(5) 系统是因果系统, 因为系统的输出不取决于x(n)的未来值。 如果
|x(n)|≤M, 则|y(n)|=|ex(n)|≤e|x(n)|≤eM,
7. 设线性时不变系统的单位脉冲响应h(n)和输入序列x(n)如题7图所示,
要求画出y(n)输出的波形。
解: 解法(一)采用列表法。
y(n)=x(n)*h(n)=
0≤m≤3
-4≤m≤n
非零区间如下:
第 1 章 时域离散信号和时域离散系统
根据非零区间, 将n分成四种情况求解: ① n<0时, y(n)=0
② 0≤n≤3时, y(n)= ③ 4≤n≤7时, y(n)= ④ n>7时, y(n)=0
1=n+1
n
1=8-m n0
3
mn4
第 1 章 时域离散信号和时域离散系统
第 1 章 时域离散信号和时域离散系统
(3) 这是一个延时器, 延时器是线性非时变系统, 下面证明。 令输入为
输出为
x(n-n1)
y′(n)=x(n-n1-n0) y(n-n1)=x(n-n1-n0)=y′(n) 故延时器是非时变系统。 由于
T[ax1(n)+bx2(n)]=ax1(n-n0)+bx2(n-n0) =aT[x1(n)]+bT[x2(n)]
信号与系统 第2章(3-5)

X
n = −∞
∑
k
x[n ]
1 k
n = −∞
∑ x[n]
2 1
k
3
单位阶跃序列可 用单位脉冲序列 的求和表示: 的求和表示:
0
k
k
u[ k ] =
n = −∞
∑ δ [n]
2.5 确定信号的时域分解
X
一、信号分解为直流分量与交流分量 二、信号分解为奇分量与偶分量之和 三、信号分解为实部分量与虚部分量 四、连续信号分解为冲激信号的线性组合 五、离散信号分解为脉冲序列的线性组合 六、信号分解为正交信号集
d
u[k ] =
u( t ) =
∫d ∫
t
−∞
δ (τ ) τ
n =−∞
∑ δ [ n] ∑ u [n]
k
k
u( t ) = d r ( t ) t r (t ) =
−∞
u[k ] = r[k + 1] − r[k ]
u(τ ) τ
d
r [ k + 1] =
n = −∞
2.4 离散时间信号的基本运算
一、序列相加与相乘
2. 序列相乘 序列相乘
x1[ k ]
0 1 k
2 1 y[k]=x1[k]× x2[k] 2 1.5
X
将若干序列同序号的数值相乘。 将若干序列同序号的数值相乘。
y[k ] = x1 [k ] × x2 [k ] × … × xn [k ]
x2 [ k ]
0
k
0
k
2.4.2 序列的相加、相乘、差分与求和
x[k] = x D C [k] + x A C [k]
k = N1
《信号、系统与数字信号处理》第二章 连续时间信号与系统的频域分析

0 21
/4
/2
(b)相位图
图2.1-2例2.1-2的频谱图
二、指数形式的傅里叶级数
利用欧拉公式将三角形式的傅里叶级数,表示为 复指数形式的傅氏级数
其中
f t F n1 e jn1t
n
F n1
1 T
t0 T t0
f t e jn1tdt
F n1 是复常数,通常简写为 Fn 。
21t
5
4
2
sin
1t
1 2
sin
31t
解:将 f t 整理为标准形式
f
(t)
1
2cos 1t来自4cos 21t
5
4
1 2
cos
31t
2
1
2
cos
1t
4
cos
21t
4
1 2
cos
31t
2
振幅谱与相位谱如图2-1所示。
cn
2
1
1
1/2
0 1 21 31
(a) 振幅图
n
/4
31
第二章 连续时间信号与系统的频域分析 ——Fourier变换
2. 1 周期信号的傅里叶级数分析 2. 2 非周期信号的频谱--傅里叶变换 2. 3 傅里叶变换的性质及定理 2. 4 系统的频域分析方法 2. 5 无失真传输系统与滤波
LTI系统分析的一个基本任务,是求解系统对任意 激励信号的响应,基本方法是将信号分解为多个基本信 号元。
一、三角形式傅里叶级数
周期信号: f t f t nT
其中
T
是信号的最小重复时间间隔,f1
1 是信号的基波频率。 T
若 f t 满足狄里赫利条件,则 f t 可以展开为三角形
数字信号处理——第2章 离散时间傅里叶变换与Z变换
• 总结:
①序列ZT的收敛域以极点为边界(包含0 和 ②收敛域内不含任何极点,可以包含0 ③相同的零极点可能对应不同的收敛域,即: 不同的序列可能有相同的ZT ④收敛域汇总:右外、左内、双环、有限长z平面
)
常见典型序列z变换
序列 Z变换 收敛域
z a
z b
注意:只有z变换和它的收敛域两者在一起才和序列相对应。 其它序列见P54: 表2-1 几种序列的z变换
2.3
z反变换
Z反变换: 从X(z)中还原出原序列x(n)
X ( z ) ZT [ x ( n)]
n
x (n) z n
实质:求X(z)幂级数展开式
Z反变换的求解方法: 留数定理法
部分分式法
长除法
1. 留数定理法
根据复变函数理论,可以推导出
x ( n)
1 2 j
X ( z ) z n 1dz
1 1 3z 1
n
z 2
2 n u ( n)
z 3
3
n
n
u (n 1)
x n 2 u n 3 u n 1
3. 幂级数法(长除法)
如果序列的ZT能表示成幂级数的形式,则序列x(n) 是幂 级数 说明: ①这种方法只对某些特殊的ZT有效。 ②如果ZT为有理函数,可用长除法将X(z)展开成幂级 数。 若为右边序列(特例:因果序列),将X(z)展开成负幂 级数; 若为左边序列(特例:反因果序列),将X(z)展开成正 幂级数; 中
z z 1 1 X z 1 z 2 z 3 1 2z 1 3 z 1
1 ZT [a u (n)] z a 1 1 az 1 n ZT [a u (n 1)] z a 1 1 az
数字信号处理期末总复习
窗函数
矩形窗 三角窗 汉宁窗 哈明窗
旁瓣峰值(dB)
-13 -25 -31 -41
阻带最小衰减 (dB) -21 -25 -44 -53
过渡带宽度
4pi/N 8pi/N 8pi/N 8pi/N
学习要点
第五章 数字滤波器结构
• 系统结构
▫ 串联(系统函数卷积) ▫ 并联(系统函数相加)
• IIR滤波器结构
矩形窗
-13
三角窗
-25
汉宁窗
-31
哈明窗
-41
根据指标确定窗型及长度 wN n
构造希望的频率响应 Hd e jw
计算脉冲响应 hd n
窗截断
hn hd n wN n
▫ 频率采样不变法
根据αs选择过渡带采样点数 确定过渡带宽度并估计频域采样点数
构造希望的频率响应
频率采样
进行IDFT获取冲击响应
数字信号处理总复习
蒋力 ieljiang@ 2014.12
学习要点
第一章 时域离散信号和时域离散系统
• 信号
▫ 模拟信号、时域离散信号、数字信号三者之间的区别; 离散信号表示方法(单位采样序列);常用的时域离散 信号;信号周期性。
• 系统
▫ 系统的线性、时不变性以及因果性、稳定性;LTI系统 输入输出关系(单位脉冲响应);求解线性卷积的图解 法(列表法)、解析法,MATLAB求解;线性常系数差 分方程求解(递推法)
▫ 直接型 ▫ 级联型 ▫ 并联型
• FIF滤波器结构
▫ 直接型 ▫ 级联型
84 //NN
滤波器结构
• 已知滤波器结构如下图所示写出其系统函数
H (z) 2 0.25 z 1 1 0.25 z 1 3 z 2 8
数字信号处理-样题
6. 设 x(n)的傅里叶变换为 X (e j ) ,如下图所示:
序列 p(n) cos(n) ,(1)请画出序列 w(n) x(n) p(n) 的傅里叶变换W (e j ) 图;(2)若
将
w(n)输入到单位脉冲响应为
h(n)
sin(0.5n) n
的
LTI
系统中,求输出
y(n)。
故当输入为 w(n)时,输入信号的非零频段都位于系统的阻带,所以输出 y(n)=0。
且有
X ( e j )
x ( n ) e j n
n
4.
已知序列的双边
Z
变换为:
X (z)
z2
2 3z
1
,试求其可能对应的序列
x(k)。
48
5. 某因果线性非时变离散时间系统的方框图如下图所示,D 表示单位延迟器。 (1)求系统函数 H(z),并写出系统的差分方程; (2)根据 H(z)求系统的单位脉冲响应 h(n);
的反变换 IDFT,验证结果是否正确。(答案请自己做) 2. 对一个连续时间信号进行采样,已知其最高频率为 1000Hz,抽样持续时间 1S,采用 FFT 对其进行频谱分析,试问抽样点的最大抽样间隔是多少?应作多少点的 FFT?
第五章、时域离散系统的网络结构
它的直接型结构为: 3. 观察下图,回答问题:
, (
n
),
记
x(n)
的
傅里叶
变换
为
X (e j ) ,则 X (e j ) |0
, X (e j ) |0.5
。
1 P0.6 (e j )
3. 已知某序列的离散时间傅里叶变换(DTFT)为:
X (e j )
信号与系统第二章(陈后金)2PPT课件
2 1 0 1 2
x [k]
3
22
1
k
2 1 0 1 2 3
x [ k ] 3 [ k 1 ] [ k ] 2 [ k 1 ] 2 [ k 2 ]
2021/4/8
28
二、基本离散时间序列
5.单位阶跃序列
定义:
u[k] 1
2 1 0 1 2
✓ [k]与u[k]的关系:
[k]u[k]u[k1]
2021/4/8
1 k 0 u[k]0 k 0
k
k
u[k] [n] n 29
二、基本离散时间序列
6.矩形序列
1 0kN1
RN[k]0 otherwise
N 1
R N[k]u[k]u[kN ][km ] m 0 RN[k] 1
k
21 0 1 2
N1
2021/4/8
30
二、基本离散时间序列
7.斜坡序列
即0N = m2p , m = 正整数时,信号是周期信号。
如果0 /2p m/N , N、m是不可约的整数, 则信号的周期为N。
2021/4/8
23
[例]判断下列离散序列是否为周期信号.
1) x1[k] = cos(kp/6)
0 /2p 1/12, 由于1/12是不可约的有理数,
故离散序列的周期N=12。
-1 0 1 2 3
k
➢ 序列的列表表示
表示k=0的位置
x[k]=[0, 2, 0, 1, 3, 1, 0]
2021/4/8
18
二、基本离散时间序列
1.实指数序列
r >1
x[k]Akr, kZ
0< r <1
r <1
x [k]
3
22
1
k
2 1 0 1 2 3
x [ k ] 3 [ k 1 ] [ k ] 2 [ k 1 ] 2 [ k 2 ]
2021/4/8
28
二、基本离散时间序列
5.单位阶跃序列
定义:
u[k] 1
2 1 0 1 2
✓ [k]与u[k]的关系:
[k]u[k]u[k1]
2021/4/8
1 k 0 u[k]0 k 0
k
k
u[k] [n] n 29
二、基本离散时间序列
6.矩形序列
1 0kN1
RN[k]0 otherwise
N 1
R N[k]u[k]u[kN ][km ] m 0 RN[k] 1
k
21 0 1 2
N1
2021/4/8
30
二、基本离散时间序列
7.斜坡序列
即0N = m2p , m = 正整数时,信号是周期信号。
如果0 /2p m/N , N、m是不可约的整数, 则信号的周期为N。
2021/4/8
23
[例]判断下列离散序列是否为周期信号.
1) x1[k] = cos(kp/6)
0 /2p 1/12, 由于1/12是不可约的有理数,
故离散序列的周期N=12。
-1 0 1 2 3
k
➢ 序列的列表表示
表示k=0的位置
x[k]=[0, 2, 0, 1, 3, 1, 0]
2021/4/8
18
二、基本离散时间序列
1.实指数序列
r >1
x[k]Akr, kZ
0< r <1
r <1