一类非线性网络化控制系统的绝对稳定性(zxh)
非线性控制系统的稳定性分析
非线性控制系统的稳定性分析1. 引言非线性控制系统在工程领域中广泛应用,具有复杂性和不确定性。
稳定性是评估非线性控制系统性能的关键指标。
因此,稳定性分析是设计和评估非线性控制系统的重要环节。
2. 线性稳定性分析方法在介绍非线性稳定性分析之前,我们首先回顾线性稳定性分析的方法。
线性稳定性分析是基于系统的线性近似模型进行的。
常用方法包括传递函数法、状态空间法和频域法。
这些方法通常基于线性假设,因此在非线性系统中的适用性有限。
3. 动态稳定分析方法为了从动态的角度描述非线性系统的稳定性,研究人员引入了基于动态系统理论的非线性稳定性分析方法。
其中一个重要的方法是利用Lyapunov稳定性理论。
3.1 Lyapunov稳定性理论Lyapunov稳定性理论是非线性稳定性分析中常用的工具。
该理论基于Lyapunov函数,用于判断系统在平衡点附近的稳定性。
根据Lyapunov稳定性理论,系统在平衡点附近是稳定的,如果存在一个连续可微的Lyapunov函数,满足两个条件:首先,该函数在平衡点处为零;其次,该函数在平衡点的邻域内严格单调递减。
根据Lyapunov函数的特性,可以判断系统的稳定性。
3.2 构建Lyapunov函数对于非线性系统,构建合适的Lyapunov函数是关键。
常用的方法是基于系统的能量、输入输出信号或者状态空间方程。
通过选择合适的Lyapunov函数形式,可以简化稳定性分析的过程。
4. 永续激励法 (ISS)除了Lyapunov稳定性理论外,ISS也是非线性系统稳定性分析中常用的方法。
永续激励法是基于输入输出稳定性的概念,通过分析系统输入输出间的关系来评估系统的稳定性。
5. 李亚普诺夫指数在某些情况下,Lyapunov稳定性理论和ISS方法无法提供准确的稳定性分析结果。
这时,可以通过计算系统的Liapunov指数来评估系统的稳定性。
李亚普诺夫指数可以被视为非线性系统中线性稳定性的推广。
6. 非线性反馈控制为了提高非线性系统的稳定性,非线性反馈控制方法被广泛应用。
一类基于神经网络的非线性时延系统的稳定性分析和控制
J1 06 u .2 0
一
类 基 于神 经 网络 的 非 线 性 时 延 系统 的稳 定 性 分 析 和 控 制
肖前 贵 杜 贞斌 胡 寿 松
( 京 航 空 航 天 大 学 自动 化 学 院 , 京 , 10 6 南 南 201) 摘 要 : 对 一 类有 参 数 摄 动 和 时 延 的 非 线 性 不 确 定 性 系统 , 出 了一 种 稳 定性 分 析 方 法 。 制 方 案将 鲁棒 控制 和 针 提 控
ma rx ie u l y IM I .An h n,t emo eig u c ran n ni e rp r sc mp n a e y t en u a ti n q ai ( ) t dt e h d l n e t i o l a a ti o n n e s td b h e r l
Xio Qi n u ,Du Zh n i a a g i e bn,H uSh u o g o sn
( olg f t main E gn ei g C l eo o t n ie r ,Na j gUnv ri fA r n uis Asr n u i , ni g 1 0 6 C i ) e Au o n ni ie s y o e o a t & n t c t a t s Na j ,2 0 1 . h n o c n a
n t r . Th t b l y a a y i s n h sz s t e p r me e e t r a i n,t e t e d l y a d t e n u a e wo k e s a i t n l s s y t e ie h a a t r p r u b t i o h i ea n h e r l m n t r i h .Th t b l y o h r o l s d l o y t m s p o e y c o s n a i n l y p n v e wo k weg t e s a i t ft e e r r co e o p s s e i r v d b h o i g a r to a a u o i l
一类不确定网络控制系统的有界输入保性能控制
状态反馈控制 ; M LI
文章 编号 :10 — 8 X2 1)2 o 1- 5 07 94 (0 00 一 o 0 0
文献标识码 :A
网络控制系统是通过计算机网络形成的实时闭环反馈系统 ,具有可实现资源共享 ,远程操作与控制 , 较高的诊断能力 , 安装与维护方便 , 能有效地减少系统的质量和体积 , 增加系统的柔韧性和可靠性等优点 , 尽管有这些优点 ,网络控制系统也存在着一系列问题 ,包括 :网络诱导时延 、数据包丢失 、数据包乱序、 单包传输或者多包传输 、网络调度 以及网络节点的驱动方式等 ,这些不确定因素影响到控制系统的建模、 分析和设计 ,更有甚者使系统性能下降或失稳。
刘建刚
( 福建工程学院 数理系, 福州 3 0 0 5 18)
摘要 :针对一类不确定的网络控制系统 ,在满 足系统一定性能指标 的基础上考虑 系统 中存在 的问题及影响系统稳
定 的各种不确定因素 , 应用李亚普诺 夫稳定性理论 , 借助线性矩阵不等式 , 推导出了闭环系统渐 近稳定充分条件 , 提 出了针对性 的控制策略 , 并给 出了有界输入保性能反馈控制率 ,优化了系统 的性能 。 关键词 :网络控制系统 ; 保性能控制 ;
() xI 七 =c () c
( 2 )
系统的性能指标
∞ 一 一
J=∑【 kQ () .() uk】 X () xk +1 kR () 4
k O =
宰 木 枣 木 木 枣 木
() 3
定理 1对于系统式 ( ) 2 和相应的性能指标 ( ) 3 ,如果存在一个标量 占,矩阵 W ∈ ,对称正定矩 R 阵 ∈ 和 N∈ 使得 L 不等式 ( ) R R MI 4 成立 , 若式 ( ) 4 有一个可行解 , , 则 uk = W, N, () xk ()
一类时滞网络控制系统的稳定性和无源性分析开题报告

一类时滞网络控制系统的稳定性和无源性分析开题报告一、选题背景及意义时滞网络控制系统是一种典型的复杂非线性动态系统,在过去的几十年里得到了广泛的研究和应用。
时滞是指系统输入或输出与系统状态之间存在一定的时间延迟,这种时间延迟会对系统的稳定性产生重要影响。
另外,网络结构的存在也使得系统的稳定性分析变得更加困难。
随着信息技术的飞速发展,网络控制系统在智能制造和智慧城市等领域得到了广泛的应用。
在这些应用场景中,时滞网络控制系统被广泛使用,例如工厂自动化、交通灯控制、智能交通、电力系统等。
因此,对时滞网络控制系统进行稳定性和无源性分析具有重要的理论意义和实际应用价值。
本文旨在研究一类时滞网络控制系统的稳定性和无源性问题。
二、论文内容1. 研究对象本文研究一类时滞网络控制系统,系统包含多个节点,每个节点都受到外部输入和其它节点的影响。
节点之间通过网络相互连接,边的权重表示网络连接的强度。
2. 稳定性分析针对该时滞网络控制系统的稳定性问题,本文将采用控制理论中的平衡点和稳定性概念进行分析。
首先确定系统平衡点,然后通过构造Lyapunov函数来判断系统是否稳定。
3. 无源性分析针对该时滞网络控制系统的无源性问题,本文将采用能量函数和耗散函数的概念进行分析。
通过构造耗散函数、研究耗散函数的性质,得到系统的无源性条件。
三、研究方法和技术路线1. 研究方法本文采用数学分析方法研究时滞网络控制系统的稳定性和无源性问题。
通过构造Lyapunov函数和耗散函数,建立系统的稳定性和无源性分析模型。
2. 技术路线(1)对时滞网络控制系统进行建模,确定控制系统的数学表达式。
(2)分析时滞网络控制系统的平衡点,建立稳定性判据。
(3)构造Lyapunov函数,分析函数的性质,判断控制系统的稳定性。
(4)构造耗散函数,分析函数的性质,判断控制系统的无源性。
(5)通过数学分析和仿真实验验证分析模型的正确性和有效性。
四、预期成果1. 提出一种有效的时滞网络控制系统的稳定性判据。
一类非线性系统的全局渐近稳定和有限时间镇定

引用格式 周映江, 王莉, 孙长银. 一类非线性系统的全局渐近稳定和有 限时间镇定. 自动化学报, 2013, 39(5): 664−672
DOI 10.3724/SP.J.1004.2013.00664
Global Asymptotic and Finite-time Stability for Nonlinear Systems
在已有的关于非线性控制系统的研究中, 许多研究是 针对下三角形式的非线性系统 (常常是系统 (1) 中, pi = 1, di = 1, fi(x) 满足下三角形式), 考虑其各种稳定性, 解决这 种问题的最经典方法是反步法[1−3]. 后来, 反步法被扩展到 pi ≥ 1 的情况下, 由此产生了加幂积分方法[4]. 其后, 在许 多学者的不懈努力下, 加幂积分方法的限制条件不断被突破, 并且对于 pi 的要求也在不断的降低[5−7].
ZHOU Ying-Jiang1 WANG Li1, 2 SUN Chang-Yin1
Abstract In this paper, the problems of global asymptotic and finite-time stability of a class of nonlinear systems are considered. The control law is designed in the following three steps: First, the full matrix form nonlinear system is divided into a lower-triangular form plus a upper-triangular form. And for the lower-triangular systems, the generalized adding a power integrator technique is used to design the global stabilization controller from top to bottom. Next, we proof that the whole system is locally asymptotically stabile in a given region under the above controller. Finally, a series of nested saturations are imposed on the above controller. And by adjusting the saturation level, the global asymptotic stability of the closed-loop systems is ensured. In addition, we can also obtain the global finite-time stability of the whole nonlinear system under appropriate conditions.
一类Lipschitz非线性随机网络化控制系统稳定与控制的开题报告
一类Lipschitz非线性随机网络化控制系统稳定与控制的开题报告1. 研究背景随着科技和工业的发展,越来越多的控制系统变得更加复杂,传统的线性控制理论逐渐不能满足需求。
因此,非线性控制理论得到了广泛的研究和应用。
随着计算机技术的迅猛发展,网络化控制系统在实际应用中也变得越来越普遍。
然而,在非线性随机网络化控制系统中,由于存在非线性项和随机项,系统的稳定性和控制问题变得更加困难。
因此,研究非线性随机网络化控制系统的稳定性和控制问题具有重要的理论和应用价值。
2. 研究目的本研究旨在探索一类Lipschitz非线性随机网络化控制系统的稳定性和控制问题,并提出有效的控制方法,为实际应用提供理论支持。
3. 研究内容本研究的主要内容包括:(1)对Lipschitz非线性随机网络化控制系统进行建模和分析,探索系统的稳定性和控制问题。
(2)研究非线性随机网络化控制系统中的控制问题,提出有效的控制方法,包括反馈控制、自适应控制、鲁棒控制等。
(3)验证所提出的控制方法的有效性,通过数值仿真和实验分析等途径进行验证。
4. 研究意义本研究将为非线性随机网络化控制系统的稳定性和控制问题提供新的研究思路和新的解决方法,具有重要的理论和应用价值。
同时,本研究还将为实际应用中的非线性随机网络化控制问题提供有效的解决方案,具有重要的社会和经济价值。
5. 研究方法本研究将采用理论分析和实验验证相结合的方法进行研究,具体包括:(1)对Lipschitz非线性随机网络化控制系统进行建模和分析,利用非线性分析和随机分析等方法探索系统的稳定性和控制问题。
(2)提出有效的控制方法,包括反馈控制、自适应控制、鲁棒控制等,针对具体的系统进行设计和分析。
(3)利用数值仿真和实验分析等途径对所提出的控制方法进行验证,确定其有效性和适用性。
6. 预期成果本研究的预期成果包括:(1)具有一定理论创新性和实际应用价值的非线性随机网络化控制系统稳定性和控制问题的研究结果。
一类含分布时滞的Lurie控制系统的绝对稳定性
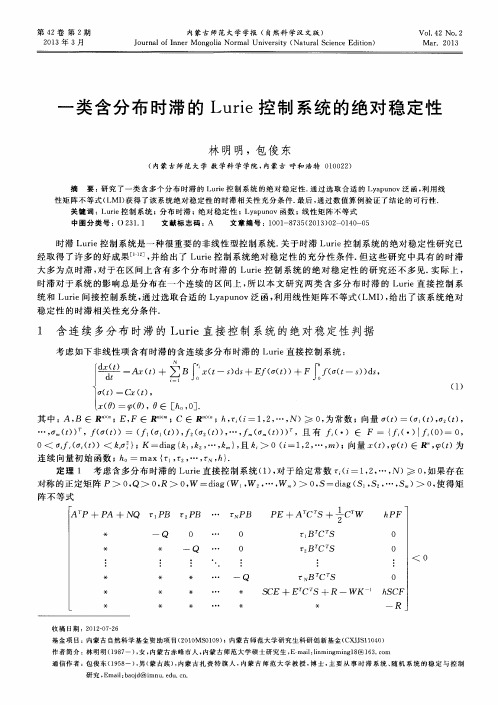
P+ P A + NQ t 1 P B r 2 PB … r N PB
P E + A c s + ÷ c w h P F
1
B C S
0
2
B C S
0
i
* *
;
0
< 0
rN B C S
*
*
SCE + E C S + R — W K
性 矩阵不等式( L MI ) 获得 了该 系统 绝 对 稳 定 性 的 时滞 相 关 性 充 分 条 件 . 最后 , 通 过 数 值 算 例 验 证 了结 论 的 可 行 性 . 关键词 : L u r i e 控 制 系统 ;分 布 时 滞 ; 绝 对 稳 定 性 ;L y a p u n o v函 数 ; 线 性 矩 阵 不 等 式
…
,
( f ) ) , 厂 ( ( £ ) )一 ( - 厂 1 ( 1 ( ) ) , f 2 ( 2 ( ) ) , …, 厂 ( ( £ ) ) ) , 且有 f ( ・ )E F一 { f ( ・ ) 1 f ( o ) 一0 ,
0< , ( ( ) )< k i d } ; K=d i a g{ 志 l , 最 2 , …, k } , 且是 > 0( i 一1 , 2 , …, ) ;向量 ( ) , ( ) E , ( £ ) 为 连 续 向量初 始 函数 ; h o — ma x{ r 1 , r 2 , …, r N , h } .
作 者 简 介 :林 明 明 ( 1 9 8 7 一) , 女, 内蒙 古 赤 峰 市 人 , 内 蒙 古 师 范 大 学硕 士研 究 生 , E ma i l : l i n mi n g mi n g l 8 @1 6 3 . c o n r
非线性控制系统的稳定性研究
非线性控制系统的稳定性研究近年来,非线性控制系统的稳定性研究引起了学界的广泛关注。
非线性系统具有很多特殊的性质,常规的稳定性分析方法不一定适用。
因此,非线性控制系统的稳定性研究对于科学技术的发展具有非常重要的意义。
1. 非线性控制系统简介非线性控制系统是指系统变量之间存在一定的非线性关系的控制系统。
与线性控制系统相比,非线性控制系统具有更强的实际应用性。
在工程实践中,许多控制系统都是非线性的,例如飞行器、机器人、化工过程等。
因此,非线性控制系统的研究具有非常重要的应用价值。
2. 非线性控制系统的稳定性问题对于非线性控制系统的稳定性问题,一直是研究者十分关注的问题。
由于非线性系统的性质比较特殊,所以分析其稳定性需要采用不同的方法。
传统的线性控制系统稳定性分析方法并不能完全适用于非线性系统。
因此,需要研究不同的非线性控制系统稳定性分析方法。
3. Lyapunov函数法Lyapunov函数法是非线性控制系统稳定性分析的一种常用方法。
该方法以Lyapunov函数为基础,对非线性控制系统进行稳定性分析。
Lyapunov函数是一个实数函数,能够描述控制系统的稳定性。
通过求解Lyapunov函数能够证明非线性控制系统的稳定性。
4. 基于稳定边界的稳定性分析稳定边界法是另一种用于分析非线性控制系统稳定性的方法。
该方法基于Lyapunov函数法,使用稳定边界理论来研究非线性系统。
稳定边界法可以应用于各种非线性控制系统,并且在控制力学、机器人、航空航天等领域中得到了广泛应用。
5. 非线性控制系统的adiabatic稳定性adiabatic稳定性是另一种用于分析非线性控制系统稳定性的方法。
该方法考虑到非线性系统的特殊性质,对系统的非线性特征进行分析。
通过adiabatic稳定性分析,可以对非线性控制系统进行更加准确的稳定性评价。
6. 非线性控制系统的后果非线性控制系统的稳定性研究对于科学技术的发展具有重要的意义。
如果非线性控制系统不稳定,将会对控制系统的正常运行产生负面影响,造成严重的经济损失。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
问题描述
则闭环系统(4) 变为: 令 τ ( t ) = t − kh ,则闭环系统 变为:
& x ( t ) = Ax ( t ) + BKx ( t − τ ( t ) ) + Dw ( t ) t ∈ [t0 , ∞ )
(5)
显然, ( t ) ∈ [τ k , h + τ k +1 ) ,故有 0 ≤ τ ( t ) < h + τ M , ( t ) = 1,我们定义 η h + τ M 。 显然, τ τ& 的定义知,此时延不仅包括了传感器到控制器的时延, 注2 由 τ k 的定义知,此时延不仅包括了传感器到控制器的时延,还有控制器到 执行器的时延;既有传输时延,也有等待时延和处理时延;可能是时变的, 执行器的时延;既有传输时延,也有等待时延和处理时延;可能是时变的,大 于一个采样周期的,也可能是任意随机的时延。 于一个采样周期的,也可能是任意随机的时延。
控制器设计
第二种方法: 第二种方法:
引入新的矩阵变量S, 引入新的矩阵变量 ,使得
%% % PR −1 P > S
补引理知, 由Schur补引理知,(13)等价于 补引理知 等价于
(13)
% − R −1 % −1 P
这样我们便可得到如下结果: 这样我们便可得到如下结果:
% P −1 <0 −1 −S
% % % min trace RR + PP + SS
s.t. (16 ) , (17 )
R I I ≥0 % R P I I ≥0 % P
{
(
)}
S I I ≥0 S
(19)
下面根据文献[14]给出如下算法: 给出如下算法: 下面根据文献 给出如下算法
控制器设计
P,R
控制器设计
% % 定理2 对于满足扇区条件(2)的Lurie网络化控制系统,如果存在正定矩阵 P,R 定理 对于满足扇区条件 的 网络化控制系统, 网络化控制系统
% 和矩阵 X ,使得下式成立
% PAT
% % % % + AP − R BX + R ∗ ∗ ∗ % −R ∗ ∗
% 和矩阵 X ,使得下式成立
% PAT
% % % % + AP − R BX + R ∗ ∗ ∗ % −R ∗ ∗
% D − PC T ΘT 0 −2 I ∗
% η BX <0 T ηD % % R − 2P
% η PAT
( )
T
% % −1 可使系统(5)绝对稳定 绝对稳定。 则控制器 K = XP 可使系统 绝对稳定。
系统(3)变为: 系统 变为: 变为
(3)
& x ( t ) = Ax ( t ) + BKx ( kh ) + Dw ( t ) x ( t ) =φ ( t ) t ∈ [ t 0 − τ M , t0 ]
t ∈ kh + τ k , ( k + 1) h + τ k +1 )
(4)
τ kca
算法 1:
% % 使得(16)、(17)、(19)成立;设 k=0; 成立; 、 、 成立 步骤1: 步骤 :寻找一组可行解 {R0 , R0 , P0 , P0 , S0 , S0 } ,使得 % % 的优化问题: 步骤2: 步骤 :求解关于 {R, R , P, P , S , S } 的优化问题:
控制器设计
% P % 定理4 对于满足扇区条件(2)的 网络化控制系统, 定理 对于满足扇区条件 的Lurie网络化控制系统,如果存在正定矩阵 R ,,S 网络化控制系统
% 和矩阵 ,使得下面的条件成立 X
% PAT
% % % % + AP − R BX + R ∗ ∗ ∗ % −R ∗ ∗
第一种方法: 第一种方法:
% 必有: 注意到 R > 0 ,必有:
(
% % % % % R − P R −1 R − P ≥ 0 %% % % % − PR −1 P ≤ R − 2 P
) (
)
等价于
这样我们便可得到如下结果: 这样我们便可得到如下结果:
控制器设计
% % 定理3 对于满足扇区条件(2)的 网络化控制系统, 定理 对于满足扇区条件 的Lurie网络化控制系统,如果存在正定矩阵 P,R 网络化控制系统
以通过求解以下的优化问题得到: 以通过求解以下的优化问题得到:
max η
s.t. P > 0, R > 0, ( 6 ) .
上述问题可以转化为线性矩阵不等式中的广义特征值问题,利用 上述问题可以转化为线性矩阵不等式中的广义特征值问题,利用LMI工具箱中 工具箱中 求解器得到该问题的全局最优解。 的gevp求解器得到该问题的全局最优解。 求解器得到该问题的全局最优解
则系统(5)在 是绝对稳定的。 则系统 在 [t 0 , ∞ ) 是绝对稳定的。
η ( BK ) R <0 T ηD R −R
T
η AT R
(6)
稳定性分析
η 利用定理1,可以求出使系统(5)保持绝对稳定的最大允许时延界 注4 利用定理 ,可以求出使系统 保持绝对稳定的最大允许时延界 η 。 可
满足如下的扇区条件: ϕ (t, y ) 满足如下的扇区条件:
(1)
ϕ T ( t , y ) ϕ ( t , y ) − Θy ( t ) ≤ 0
(2)
τ kca
问题描述
做如下假设: 做如下假设:
系统状态是完全可测量的; 系统状态是完全可测量的; 传感器采用时间驱动,控制器和执行器采用事件驱动; 传感器采用时间驱动,控制器和执行器采用事件驱动; 数据采用单包传输,不考虑数据丢包和错序; 数据采用单包传输,不考虑数据丢包和错序; u(t) 通过零阶保持器实现,真实的控制输入为分段连续函数,第一个控制 通过零阶保持器实现,真实的控制输入为分段连续函数, 信号到达对象前 u(t)=0; ;
Lurie系统是一类非常重要的非线性控制系统,多数非线性物理系统可表示 系统是一类非常重要的非线性控制系统, 系统是一类非常重要的非线性控制系统 系统的结构形式, 成Lurie系统的结构形式,即一个线性系统和非线性单元的反馈连接,非线 系统的结构形式 即一个线性系统和非线性单元的反馈连接, 性部分满足一个扇区条件。 性部分满足一个扇区条件。
本文研究了Lurie网络化控制系统的绝对稳定性问题。 网络化控制系统的绝对稳定性问题。 本文研究了 网络化控制系统的绝对稳定性问题
问题背景
Lurie网络化控制系统结构图 网络化控制系统结构图
问题描述
考虑如下的Lurie系统: 系统: 考虑如下的 系统
x ( t ) = Ax ( t ) + Bu ( t ) + Dw ( t ) & y ( t ) = Cx ( t ) w ( t ) = −ϕ ( t , y ( t ) )
稳定性分析
定理1 对于满足扇区条件(2)的闭环系统 的闭环系统(5), 定理 对于满足扇区条件 的闭环系统 ,如果存在正定矩阵 P 和 R,满足下 , 述线性矩阵不等式
AT P + PA − R PBK + R PD − C T ΘT ∗ −R 0 ∗ ∗ −2 I ∗ ∗ ∗
一类非线性网络化控制系统的 绝对稳定性
问题背景
Halevi和Ray[3]考虑了连续时间线性对象和离散时间控制器的情况 和 考虑了连续时间线性对象和离散时间控制器的情况 象的状态方程离散化,利用状态增广的方法分析了 的稳定性。 象的状态方程离散化,利用状态增广的方法分析了NCSs的稳定性。 的稳定性 Nilsson[4] 给出了网络时滞为定常、独立随机和随机但服从马尔可夫链时的NCSs 给出了网络时滞为定常、独立随机和随机但服从马尔可夫链时的 模型,解决了不同模型下的LQG(Linear Quadratic Gaussian)优化控制问题。 优化控制问题。 模型,解决了不同模型下的 优化控制问题 Walsh[5]等利用摄动的方法考虑了以连续时间系统作为被控对象,采用连续 等利用摄动的方法考虑了以连续时间系统作为被控对象, 等利用摄动的方法考虑了以连续时间系统作为被控对象 的动态反馈控制器的NCSs的稳定性,给出了保证系统性能的最大允许传输间 的稳定性, 的动态反馈控制器的 的稳定性 隔(Maximum Allowable Transfer Interval,MATI)。 , 。 W. Zhang[6]将NCSs建模为异步动态系统 建模为异步动态系统(Asynchronous Dynamic Systems, 将 建模为异步动态系统 , ADS),利用 关于ADS的结果分析了 的结果分析了NCSs存在数据丢包时系统的稳定 ,利用Hassibi[7]关于 关于 的结果分析了 存在数据丢包时系统的稳定 性。
% D − PC T ΘT 0 −2 I ∗
% η PAT % η BX −S
( )
T
η DT
<0
(16)
− R P <0 P −S % % SS = I RR = I PP = I
% % −1 可使系统(5)绝对稳定 绝对稳定。 则控制器 K = XP 可使系统 绝对稳定。
(17)
(18)
控制器设计
注意到定理4中含有等式约束 注意到定理 中含有等式约束(16),定理 给出的条件不是一个凸优化问 中含有等式约束 ,定理4给出的条件不是一个凸优化问 题,无法直接使用数值软件求解。我们利用文献[14]中提出的锥补线性化 无法直接使用数值软件求解。我们利用文献 中提出的锥补线性化 (Cone Complementary Linear, CCL)的方法来求解,即定理 中的条件可以 的方法来求解, 的方法来求解 即定理4中的条件可以 转化为如下的优化问题: 转化为如下的优化问题: