动力吸振器的基础知识
动力吸振器研究发展历史
动力吸振器的研究历史主要分为黎明期、发展期、扩展期和应用期4个阶段。
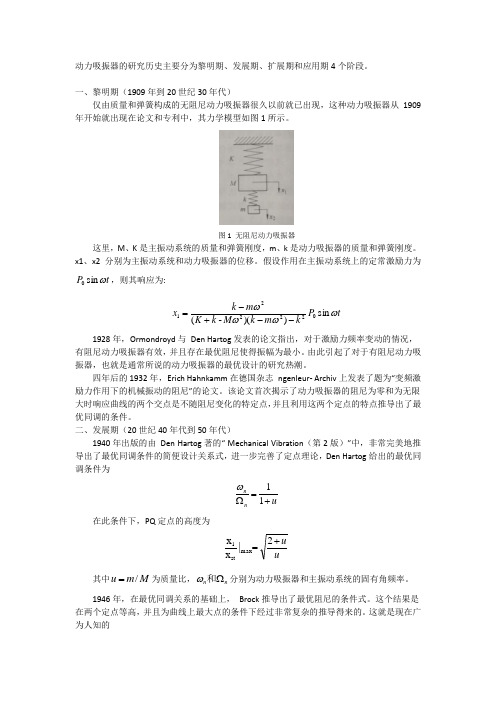
一、黎明期(1909年到20世纪30年代)仅由质量和弹簧构成的无阻尼动力吸振器很久以前就已出现,这种动力吸振器从1909年开始就出现在论文和专利中,其力学模型如图1所示。
图1 无阻尼动力吸振器这里,M 、K 是主振动系统的质量和弹簧刚度,m 、k 是动力吸振器的质量和弹簧刚度。
x1、x2分别为主振动系统和动力吸振器的位移。
假设作用在主振动系统上的定常激励力为t P ωsin 0,则其响应为:t P k m k M k K m k x ωωωωsin ))(-(022221--+-= 1928年,Ormondroyd 与 Den Hartog 发表的论文指出,对于激励力频率变动的情况,有阻尼动力吸振器有效,并且存在最优阻尼使得振幅为最小。
由此引起了对于有阻尼动力吸振器,也就是通常所说的动力吸振器的最优设计的研究热潮。
四年后的1932年, Erich Hahnkamm 在德国杂志 ngenleur - Archiv 上发表了题为“变频激励力作用下的机械振动的阻尼”的论文。
该论文首次揭示了动力吸振器的阻尼为零和为无限大时响应曲线的两个交点是不随阻尼变化的特定点,并且利用这两个定点的特点推导出了最优同调的条件。
二、发展期(20世纪40年代到50年代)1940年出版的由 Den Hartog 著的“ Mechanical Vibration (第2版)”中,非常完美地推导出了最优同调条件的简便设计关系式,进一步完善了定点理论,Den Hartog 给出的最优同调条件为unn+=Ω11ω 在此条件下,PQ 定点的高度为 uu +=2|x x max st 1 其中M m u /=为质量比,n n Ω和ω分别为动力吸振器和主振动系统的固有角频率。
1946年,在最优同调关系的基础上, Brock 推导出了最优阻尼的条件式。
这个结果是在两个定点等高,并且为曲线上最大点的条件下经过非常复杂的推导得来的。
动力吸振器PQ定点理论研究
动力吸振器PQ定点理论研究张多【摘要】传统的被动式动力吸振器对窄频激励的减振有很好的效果,但是对于宽频激励的减振并不理想.针对这种情况,人们对主系统无阻尼时动力吸振器进行研究,得出了PQ定点理论.前人的研究中并没有讨论动力吸振器质量和固有频率对P、Q 振幅倍率的影响.文章中推导了吸振器的质量比、固有频率比对定点PQ两点振幅倍率的影响.【期刊名称】《汽车实用技术》【年(卷),期】2018(044)009【总页数】3页(P72-74)【关键词】动力吸振器;PQ定点理论;振幅倍率【作者】张多【作者单位】陕西航空职业技术学院,陕西汉中 723000【正文语种】中文【中图分类】U461.2前言动力吸振器是工程实际中一种常用的振动控制技术。
动力吸振器从发明到现在已历经一个多世纪[1]。
因其结构相对简单,并且能够有效的减小频率变化不大的机构和设备的振动,所以已经成为工程领域中对振动进行控制的重要手段。
当主系统无阻尼时具有PQ定点现象,通过该现象可对吸振器参数进行优化[2]。
传统的PQ定点理论是在动力吸振器的质量比和固有频率一定的情况下进行讨论。
在本文中推导了动力吸振器的质量比和固有频率比对P、Q两点振幅倍率的影响。
文中分析的结论,对动力吸振器的设计和半主动控制具有一定的应用价值。
1 动力吸振器的基本原理动力吸振器作为一种减振装置,其减振原理不是靠耗损能量进行减振,而是通过吸振器质量的动力作用,使吸振器在主系统上产生一个与强迫振动力相抵消的反作用力,以此来达到减振的目的[3]。
图1为主系统无阻尼时动力吸振器模型,m1、k1为主系统的质量、刚度;m2、k2、c2为吸振器的质量、刚度、阻尼;主系统的位移x1,动力吸振器的位移为x2;坐标原点都选择在各自的静平衡位置。
图1 动力吸振器模型应用牛顿第二定律,可以建立以下数学模型:当F为简谐激励时,,系统的响应可以表示为:式中,动力吸振器固有频率由Hahnkamm的PQ定点理论可知[4],当主系统参数和动力吸振器的质量和固有频率一定后,无论吸振器阻尼比如何变化,主系统的振幅倍率曲线总有两个共同的交点P、Q,即两点的振幅倍率不受阻尼比的影响,当主系统质量m1=1,刚度为k1=1时,做出主系统在不同吸振器阻尼比下的振幅倍率曲线,如图2所示。
直升机动力学基础(直升机振动控制-2010-11)

南京航空航天大学直升机技术研究所 振动响应(气弹响应),以NΩ为主,随谐波次数降低。
南京航空航天大学直升机技术研究所 振动水平随飞行状态而变。激振力在小速度、大速度时较
大,小速度有峰值,振动水平亦然。
南京航空航天大学直升机技术研究所 机体不同部位上,模态特性不同,不同方向、不同频率、振动水 平也不同。
南京航空航天大学直升机技术研究所
1.静止在平衡位置上的单自由度系统,已知参数m、
k、c,求其受简谐激振力 f (t ) F sin( k t ) 作用时的 0 m 响应。 2.一直升机主减速器与机身之间隔振弹簧垂直方向 的刚度为k1,起落架在地面滑跑时垂直方向的刚度 为k2。已知旋翼和主减速器的质量为m1,机身质量 为m2,桨叶片数为n,不计阻尼。 (1)当直升机滑跑时,桨毂上作用有垂直方向的 激振力 F1 sin(nt ) ,求机身的稳态响应。 (2)当直升机飞行时,桨毂上作用有垂直方向的 激振力 F2 sin(nt ) ,求机身的稳态响应。
主动减振系统有频率调谐跟踪式动力吸振器、 高阶谐波控制(HHC)系统、主动控制襟翼 (ACF)——包括机械式或智能结构、结构响应 主动控制(ACSR)系统等,而后在当前受到广泛 关注。 ACSR的基本思想是叠加原理:机体的振动是 由旋翼激振力所引起的振动与ACSR系统产生的激 振响应线性叠加而成,而ACSR的功能就是使其和 为最小。其做法是在直升机机体主要模态的非节 点位置用作动力筒施加激振,从而减小机体关键 部位的振动水平。
分析机体动力学特性的目的: 1)为了准确预估直升机振动水平; 2)在机体结构设计时,能得到满意的 动力学特性,从而降低直升机振动水平。 现代直升机设计一般都采用有限元法来 分析机体动力学特性,但由于机体结构十 分复杂,分析难度大,预估的准确度还不 能令人满意。但有限元分析在解决直升机 振动问题上还是发挥着重要作用。
动力吸振器PQ定点理论研究

作者简介:张多,就职于陕西航空职业技术学院,助教。
1 动力吸振器的基本原理
动力吸振器作为一种减振装置,其减振原理不是靠耗损 能量进行减振,而是通过吸振器质量的动力作用,使吸振器 在主系统上产生一个与强迫振动力相抵消的反作用力,以此 来达到减振的目的[3]。图 1 为主系统无阻尼时动力吸振器模 型,m1、k1 为主系统的质量、刚度;m2、k2、c2 为吸振器的 质量、刚度、阻尼;主系统的位移 x1,动力吸振器的位移为 x2;坐标原点都选择在各自的静平衡位置。
(7) (8)
固有频率比
。
由 Hahnkamm 的 PQ 定点理论可知[4],当主系统参数和
动力吸振器的质量和固有频率一定后,无论吸振器阻尼比如
何变化,主系统的振幅倍率曲线总有两个共同的交点 P、Q,
即两点的振幅倍率不受阻尼比的影响,当主系统质量 m1=1, 刚度为 k1=1 时,做出主系统在不同吸振器阻尼比下的振幅倍 率曲线,如图 2 所示。
3 为不同质量比 μ 对主系统减振效果的影响。由图可知,当 质量比 μ 越大时,在减振频带内吸振器对主系统的减振效果 越好,此时动力吸振器的有效减振频带也越宽。但是当质量 比 μ 不断变大时,在一阶共振频率对应的峰值振幅倍率会不 断变大,二阶共振频率对应的峰值振幅倍率不断减小。还因 为在实际应用中,既要考虑安装空间位置还要考虑吸振器质 量对结构的整体影响,所以选取吸振器质量时只能在合适的 范围内进行考虑。
10.16638/ki.1671-7988.2018.09.021
动力吸振器 PQ 定点理论研究
机械动力学(振动学)理论知识总结
机械动力学理论知识点总结机械振动:指物体在其稳定的平衡位置所做的往复运动;固有振动:无激励时,系统所有可能的运动的集合;自由振动:没有外部激励,或者外部激励出去后,系统自身的振动;自激振动:系统有其本身运动所诱发和控制的激励下发生的振动;参数振动:激励源为系统本身含随时间变化的参数,这种激励所引起的振动;简谐振动:物体与位移成正比的恢复力作用下,在其平衡位置附近,按照正弦规律做往复的运动;阻尼:系统中存在的各种阻力:干摩擦力,润滑表面阻力,液体或者气体等介质的阻力、材料内部的阻力。
瑞利法:利用能量法,将弹簧的分布质量的动能计入系统的总动能,仍按单自由度系统求固有频率的近似方法;耦联:两个质点的运动不是独立的、他们彼此受另一个质点的影响。
弹性耦联:表示振动位移的两个以上坐标出现在同一个运动方程式中,就称这些坐标之间存在弹性耦联;惯性耦联:当一个微分方程式中出现两个以上的加速度项时,称为在坐标之间存在惯性耦联;解耦:就是用数学方法将两种运动分离开来处理题赏用解帮方法就是忽略或简化对所研究问题影响较小的种运动,只分析主要的运动。
拍振:同一方向两简谐振动合成时,出现拍振的条件是两个简谐分量的顿率相差很小。
对于两自由度无阻尼的自由振动,即它们的主振动是简谐振动,所以当两个固有频率相差很小的时候可能出现拍振。
响应谱:系统在给定激励下的最大响应值与系统或激励的某一参数之间的关系曲线图。
耦合是指两个或两个以上的体系或两种运动形式间通过相互作用而彼此影响以至联合起来的现象。
瑞利能量法:适用于求系统的基频,他的出发点是假设振型和利用能量守恒条件;里兹法:里兹法对近似振型给出更合理的假设,从而算出的基频值进一步下降,并且可得到系统较低的前几阶固有频率,及相应的主振型。
邓克来法:是求多圆盘的横向振动基频近似值的一种方法,当其他各阶的固有频率远远高于基频时,利用此法估计基频较方便。
基频为实际值的下限。
邓克来法和瑞利能量法可以确定基频的范围。
东北大学计算机仿真作业:动力吸振器原理仿真

东北大学动力吸振器原理仿真——计算机仿真第五次作业X X X2015XXXX-机械XXXX班目录I动力吸振器概述 (2)1.1吸振器 (2)1.2仿真需求 (2)II系统建模 (3)2.1模型分析 (3)2.2模型假设 (3)2.3模型符号 (3)2.4微分方程 (4)III方程求解 (4)3.1将高阶方程组化为一阶方程组 (4)3.2离散化 (5)3.3 迭代计算 (5)3.4程序代码 (5)3.5运行结果 (7)IV系统分析 (8)4.1动力吸振器原理分析 (8)4.2 动力吸振器各参数分析 (10)4.2.1阻尼 (11)4.2.2吸振器M、K (12)V系统仿真 (14)5.1 数值仿真 (14)5.1.1阻尼C仿真 (14)5.1.2质量与刚度仿真 (15)5.1.3激振频率ω仿真 (16)5.2软件仿真 (17)5.2.1未添加质量块系统 (17)5.2.2加入吸振器 (18)V结论 (20)I 动力吸振器概述1.1吸振器受控对象在受到振源的影响下产生振动,振源可以由自身产生(如内部质量不均),也可以由外部激振力产生。
根据作用位置不同,减振方式可以分为图示5中方式。
图1 五种减振方式其中,动力吸振器是通过弹性元件把辅助质量连接到振动系统上的一种减振装置,如图2.图2 动力吸振器动力学模型1.2仿真需求以两自由度质量—弹簧—阻尼系统分析,主系统1m 为受控对象,要求当质量块1m 受到激振力或者自激力时,在质量块2m 的反作用力下减小或者消除振动。
先分析质量块1m 随时间的振动状态,其次再分析系统参数如k 、C 、2m 对主系统振动的影响,最后通过仿真平台Simulink 数值仿真和仿真动画Adams 进行动态仿真。
II系统建模2.1模型分析构建两自由度系统振动动力学模型,如图3,设定1m受激振力tF11sinω作用,2m受激振力tF22sinω作用,在系统静止时1m、2m的平衡位置为运动原点,向上为正,主系统和吸振器的位移分别为1x、2x。
动力吸振器对车辆垂向振动能量及悬架性能的影响

振动与冲击JOURNALOFVI/RATIONANDSHOCK第39卷第22期Vol.39No.222020动力吸振器对车辆垂向振动能量及悬架性能的影响白世鹏,侯之超(清华大学汽车安全与节能国家重点实验室,北京100084)摘要:研究了布置在不同位置处动力吸振器对车辆垂向振动耗散功率及悬架性能的影响。
以考虑轮胎阻尼的1/4车辆垂向动力学模型为基础,分别对簧上质量和簧下质量匹配动力吸振器,构建了两种带吸振器的车辆模型。
针对简谐路面激励和随机路面激励,定义了指标参数,分别用于评价悬架性能和系统的耗散功率。
据此开展仿真计算,从幅频特性和响应均方根两方面分析了吸振器的影响。
结果表明:对于两种路面激励,簧上吸振器侧重于提升车辆的悬架性能,而簧下吸振器可以吸收更多的振动耗散能量;另一方面,对于随机激励,两处吸振器均不改变车辆的总体耗散功率。
关键词:动力吸振器"DVA);振动能量;车辆垂向动力学;轮胎阻尼中图分类号:TH113.1文献标志码:A D0I:10.13465/j.oki.jvs.2020.22.023Impact of dynamic vibration absorbers on vehicle vertical vibration energy andsuspension performances[AD Shipeng,)0M Zhichao(State Key Laboratoc of Automotive Siety and Energy,Tsinghua University,Beijing100084,China) Abstract:The variation of vehicle vemicot vibration enercy and suspension pemomnancas was addressed when a dynamic vibration absorber(DVA)was adopted at di-yyt positions.Based on a qudrtyBor model with tire damping taken into account,two vehicle models were constructed when the DVA was matched to the sprung mass or the unsprung mass.Rysding the road excitation as siepta harmonic or random,indexes were respectivvly defined to evaluata suspension peirmancas and dissipated power during vehicle vibration.Numyicot sieulations were then conducted so as to reveal the iepact of the DVAs in teens of system amplitude-Bequency characteCsticr and the root mean square vs I uvs of the dynamic response.The results with both road excitations show that the sprung-DVA is more efiicient in improving suspension pyformneas,white the unspcmg-DVA absorbs more dissipied viVration enercy.For the random excitation on the other hand,either of the introduced DVAs wilt not change the overall dissipated enercy.Key woirt:dynamic vibration absorber"DVA);viVration enercy;vehicle verticol dynamicr;tire damping动力吸振器在车辆系统及其部件的减振中有较为广泛的应用[1"3]&对于传统的内燃发动机汽车,吸振器常用来改善车辆平顺性与轮胎接地性能[4-5]&近年来,对于轮毂驱动电动汽车,有学者从仿真角度探索应用吸振器克服较大簧下质量带来的不利影响[6"7]&这些研究分别对车身或底盘部件设置吸振器&不过迄今尚未见到文献从车辆整体的振动耗散功率的角度探讨吸振器布置位置带来的影响。
主动式动力吸振器的振动控制研究

[ 键词 ]主动式动力吸振 器;主动控制力 ;控制频带 ;能量转移 关
[ 中图分 类号]0 2 [ 38 文献标志码] A [ 文章编号 ]17 4 3 (0 2 3 0 7— 4 6 3— 4 2 2 1 )o —06 0
动 力吸振 器 的研 究 经历 了从被 动 式 到 主动 式 的演 化 过程 . 12 9 8年 D nH r g率 先建 立 了 动力 调 e at o
表达式.通过算例 ,分别绘 出了主动控制 力 系数 、主 动控 制 力、结构振 幅与外激励 频 率之 间的关 系曲线. 研 究表 明,主动式动力吸振器的控制频带范 围较宽 ,主动控制 的能量转移对控 制结构振动效 果较 明显 ,且
系统 转 移 的 能 量 随主 动 控 制 力 的 增 大而 增 大 .
于其 有效 减振频 带 窄 ,被 动减振 技术 已经 不 能满足 工程发 展 的需要 ,从 2 纪 5 0世 O年代 开始 主动减 振
技术 逐渐 兴起 I .许 多学者研 究 了一些 新 型的动 力 吸振 器 ,孙 志卓等 进 行 了一种 主动 电磁 式 动力 4
吸振器 的研 究 与设计 ,并 通过仿 真分 析 验 证 了这 种 方 案 的 可行 性 和 有 效性 .李 剑 锋 等 研 制 了一 种
使得外 激 励 的频 率或 幅值 变化 时动力 吸振 器 能够迅 速调节 自身 参数 ,达 到期望 的减振 效果 .本文 从能 量角度 分 析主动 式动力 吸振 器 的工作 原理 ,研究 主动 控制对 结 构振动 控制 的有效 性 .
1 动 力学 方 程 的建 立 及 求解
主 动式 动力 吸振器 是 在 动 力 吸振 器 基 础 上增 加 一 个 主 动 作 动
第2 0卷
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二自由度系统的应用场景之一是为动力吸振器设计提供理论支撑,动力吸振器作为一种减振装置,其减振原理不是依靠耗损能力进行减振,而是通过吸振器质量的动力作用,使吸振器在主系统上产生一个与强迫振动力相抵消的反作用力,依次来达到减振目的。
一、无阻尼主系统的二自由度模型及幅频特性
图1 无阻尼主系统的二自由度模型
图1为无阻尼主系统的二自由度模型,m1,k1为主系统的质量、刚度;m2,k2,c2为吸振器的质量、刚度、阻尼;主系统的位移为x1,动力吸振器的位移为x2;
应用牛顿第二定律,可得该系统的振动微分方程:
m1ẍ1+c2(ẋ1−ẋ2)+k2(x1−x2)+k1x1=F
m2ẍ2+c2(ẋ2−ẋ1)+k2(x2−x1)=0
当F为简谐激励时,F(t)=F0e jωt,系统的响应可以表示为:
x1=X1e jωt,x2=X2e jωt
将响应表达式代入振动微分方程,可得主系统的幅频特性曲线
|X1
X st
|=√
(γ2−λ2)2+(2γλξ2)2
[(1−λ2)(γ2−λ2)−μγ2λ2]2+[1−(1+μ)λ2]2(2γλξ2)2
式中,
质量比μ=m2
m1
;
主系统固有频率ωn1=√k1
m1
,单位rad/s;
动力吸振器固有频率ωn2=√k2
m2
,单位rad/s;
吸振器阻尼比ξ2=2
2m2k2
=c2
2m2ωn2
;
主系统静变形为X st=F0
k1
;强迫振动比λ=ω
ωn1
;固有频率比γ=ωn2
ωn1。
二、有阻尼主系统的二自由度模型及幅频特性
当主系统存在阻尼时,二自由度系统的模型如图2所示
图2带阻尼主系统的二自由度模型
其中m1,k1,c1为主系统的质量、刚度;m2,k2,c2为吸振器的质量、刚度、阻尼;主系统的位移为x1,动力吸振器的位移为x2;
应用牛顿第二定律,可得该系统的振动微分方程:
m1ẍ1+c2(ẋ1−ẋ2)+k2(x1−x2)+c1ẋ1+k1x1=F
m 2ẍ2+c 2(ẋ2−ẋ1)+k 2(x 2−x 1)=0
将振动微分方程改写成矩阵方程为:
[m 100
m 2]{ẍ1
ẍ2}+[c 1+c 2−c 2−c 2
c 2]{ẋ1ẋ2}+[k 1+k 2
−k 2−k 2
k 2]{x 1x 2
}={F
0} 简写为
[M ][X ]+[C ][X ]+[K ][X ]=[F]
其中[M ],[C ],[K ]分别代表质量矩阵,阻尼矩阵和刚度矩阵,[X ],[X ],[X ],[F]分别代表加速度矩阵、速度矩阵、位移矩阵和激励力矩阵。
当F 为简谐激励时,F (t )=F 0e jωt ,系统的响应可以表示为:
x 1=X 1e jωt ,x 2=X 2e jωt
将响应表达式代入振动微分方程,可得主系统的振幅倍率
|X 1X st |=√(γ2−λ2)2+(2γλξ2)2
(γ2−[1+4γξ1ξ2+(1+μ)γ2]λ2+λ4)2+(2λ{(γ2−λ2)ξ1+γ[1−(1+μ)λ2]ξ2})
2 式中:
{
A =γ2−λ2
B =2γλξ2
C =γ2−[1+4γξ1ξ2+(1+μ)γ2]λ2+λ4
D =2λ{(γ2−λ2)ξ1+γ[1−(1+μ)λ2]ξ2}
则幅频特性曲线表达式可简化为
|X 1X st |=√A 2+B 2
C 2
+D
2 当主系统的参数一定是,主系统幅频特性曲线与动力吸振器固有频率比、质量比、阻尼比都有关。
通过讨论吸振器各参数对振幅倍率的影响,就可以通过科学的方法来设计动力吸振器的参数来减小主系统的振动。