MATLAB/Simulink在汽车防抱死系统仿真分析中的应用
汽车防抱死制动系统控制方法分析与仿真研究

结论
本次演示对汽车防抱死制动系统的控制策略进行了深入研究和仿真实验,并 进行了实验验证。结果表明,优化后的汽车防抱死制动系统控制策略能够有效提 高车辆的制动性能和安全性。本次演示也探讨了汽车防抱死制动系统的未来发展 方向和应用前景,认为随着智能驾驶技术的不断发展,汽车防抱死制动系统将会 向着更加智能化、个性化的方向发展。
在实现过程中,我们采用了单片机作为控制核心,并利用软件编程实现控制 算法。通过搭建硬件实验平台进行实验测试,我们发现所设计的ABS控制系统在 各种工况下均具有较好的控制效果和鲁棒性。
结论
本次演示通过对汽车防抱死制动系统控制方法的研究和仿真,提出了一种基 于自适应模糊逻辑的ABS控制系统设计方案。通过实验测试,该方案在各种工况 下均具有较好的控制效果和鲁棒性。然而,尽管该方案具有一定的优点,但仍存 在一些局限性。例如,该方案仍无法完全克服制动力调节过程中的滞后问题。因 此,未来研究可以进一步探索更加快速和智能的ABS控制方法。
结果与讨论
通过对ABS系统的控制策略和算法的综述,我们发现现有的控制方法大多只 于单个控制目标(如车轮滑移率或制动减速度),而忽略了其他因素的影响(如 路面附着系数、轮胎气压等)。此外,不同控制策略和算法之间缺乏对比与评估, 因此难以判断其优劣。
在仿真实验中,我们分别采用了逻辑门限值控制、最优控制和滑模控制三种 策略,并对它们进行了对比与评估。结果表明,在低附着系数路面条件下,逻辑 门限值控制的性能较差,而最优控制和滑模控制的性能较好。但在高附着系数路 面条件下,逻辑门限值控制的性能却表现出了较好的稳定性和鲁棒性。此外,我 们还发现不同控制策略在不同制动工况下的动态性能和鲁棒性也存在差异。
结论
本次演示对汽车防抱死制动系统的控制方法进行了分析与仿真研究。结果表 明,现有的ABS系统控制方法仍存在一定的问题和不足之处,如缺乏对整体控制 系统的综合分析、难以应对复杂道路工况等。因此,未来研究方向应包括:1) 综合考虑多种影响因素(如路面附着系数、轮胎气压等),优化ABS系统的控制 策略;2)
基于MATLAB的汽车ABS制动系统仿真研究

Internal Combustion Engine & Parts基于MATLAB的汽车ABS制动系统仿真研究周宁®;周辉于(①安徽三联学院机械工程学院,合肥230601;②洛阳理工学院,洛阳471023)摘要:汽车防抱死制动系统是现代汽车的关健部件,本文在基于Matlab软件中Simulink的基础上,以比亚迪F6的具体数据进 行PID控制的A B S防抱死制动系统的建模,并针对高低不同附着系数的路面条件进行仿真性能的研究。
关键词院Matlab;防抱死系统;仿真研究0引言汽车防抱死制动系统是现代汽车普遍采用的一种主 动安全装置,A B S装置的使用能够大大降低汽车在紧急制 动时的事故率,提高驾乘人员的乘坐安全性。
汽车A B S系统一般由车轮速度传感器、制动压力调节装置、电子控制 单元A B S EC:U等几部分组成,通过A B S E C U中的程序控 制,能够有效地提高车辆在紧急制动时的安全性。
M atlab软件具有大量的工具包,功能强大。
Simulink 是实现动态系统建模和仿真的一个软件包,体现了 Matlab 软件的扩展与特色。
由于M atlab语言环境中Sim u link软 件具有用户界面友好,操作方便等优点,所以它成为了目 前工程界常用的仿真工具。
1基本原理目前,A B S系统在汽车上得到了广泛的使用,此系统 是在普通制动系统的基础上增加了轮速传感器、压力调节 器和电子控制单元E C U等装置,A B S系统的控制目标是 将车轮滑移率控制在20%附近。
其工作原理主要依靠车速 传感器收集的车速信号对车轮是否已经抱死进行判断,及基金项目:安徽三联学院校级一般自然科学科研项目《基于 M atlab的汽车A B S制动系统仿真研究》(编号:KJYB2017005 )。
作者简介:周宁(1988-)女,河北衡水人,硕士研究生,助教,现工 作单位安徽三联学院机械工程学院,研究方向为车辆安全技术。
汽车防抱死制动系统仿真研究
A B / S MATL 系统 采用 P I D控制 算法进行研 究, 采用 i mu l i n k软件进行仿具 硼 ’ 侵 社删开
关键 词 : 防抱死制动 系统 ; M
B / s i I n u h n k ; 仿真分析
防抱死制动系统 是现代汽 车提高 主动安 全性 的主要技 术
了模拟效益 , 同时模拟过程 采用数 值计算 的方式 进行 , 模 拟的
技术 研发
T E C H N 0 L 0 GY A N D MA RK E T
Vo 1 . 2 0, No . 1 1, 2 0 1 3
本文采用两种输 出方式 , 一 是 Wo r k s p a c e输 出方 式 , 另一 种是 阶跃输出 。Wo r k s p a c e 输 出可 以定义一个 系列输 出, 可 以 给定一个时间和输出序列 , 第 一个值 为时间 , 第二个 值为输 出 的幅度 , 如油门踏板 的输 出可 以[ 0 5 0 ; 1 0 4 0 ; 1 5 8 0 ; 1 0 0 0 ; 3 0 0 0 ] 。根据模拟需要 可以 自主选择采用哪个数值模块进行 , 但 是 驾驶 员控制要点 中只有输 出模块没有输入模块 ; 阶跃输 出是在 特定的时间产生一阶跃输 出并 一直维持 在这种 阶跃输 出到仿
公司 、 宝马 、 本次、 丰 田等知名汽车生产企业 。
A B S系统开发的关 键技 术是 控制 逻辑算 法 的开发 , MA r _ L A B / s i m li u n k是一种 建模 和模拟 的计算机工具 , 程序可实现可 视化 , 避免代码 编制 的繁琐 工作 , 本文基 于 M A I L A B / s i m 1 i n k
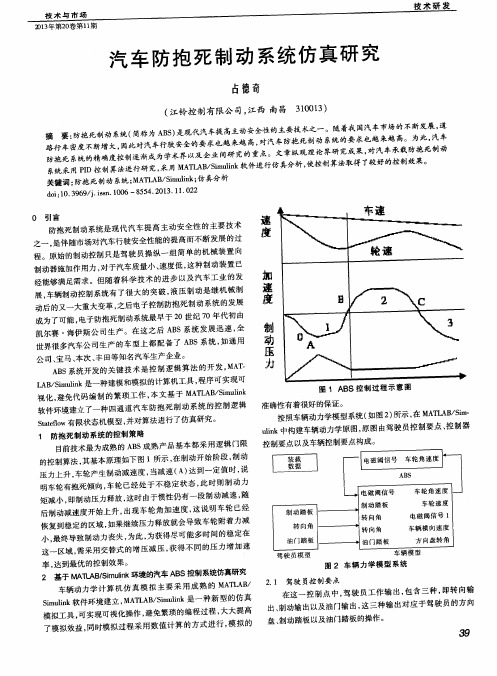
的控制算法 , 其基本原理如下图 1所示 , 在制动开始阶段 , 制动
基于MATLAB的汽车防抱死制动系统仿真研究

基于MATLAB的汽车防抱死制动系统仿真研究
潘开广
【期刊名称】《农业装备与车辆工程》
【年(卷),期】2008(000)008
【摘要】汽车防抱死制动系统(ASS)是一种很重要的汽车主动安全技术,而寻找理想的控制逻辑规律是车辆防抱制动系统研究与开发的重点.在MATLAB/Simulink 仿真环境下利用Stateflow建立了有限状态机模型,实现了带防抱制动系统(ABS)的车辆动力学模型的计算机仿真.仿真结果表明,该系统能比较真实地反映汽车ABS系统的实际工作过程,达到了满意的控制效果.
【总页数】4页(P51-54)
【作者】潘开广
【作者单位】江西交通职业技术学院汽车工程系,江西,南昌,310013
【正文语种】中文
【中图分类】U463.52;TP391.9
【相关文献】
1.基于Matlab/Simulink的汽车防抱死制动系统的仿真研究 [J], 付百学;胡胜海
2.基于模糊理论的汽车防抱死制动系统仿真分析 [J], 吴义虎;凌志强;罗珊
3.基于MATLAB及VB的汽车防抱死制动系统联合仿真设计研究 [J], 乔斌
4.基于simulink的汽车防抱死制动系统的仿真研究 [J], 李少廷;徐家川
5.基于Matlab/Simulink的半挂汽车列车防抱死制动系统仿真研究 [J], 王立平;李守成;刘英杰
因版权原因,仅展示原文概要,查看原文内容请购买。
第18章基于VC++和MATLAB的汽车ABS系统仿真PPT课件
18.1 汽车ABS系统工作原理
汽车制动性能是汽车的主要性能指标之一,汽车的制动性能 好坏直接关系到汽车的安全行驶。为了提高汽车的制动性 能,目前大多数轿车都安装了ABS(Anti-lock Braking System,防抱死制动系统)系统。采用该系统可以使得 汽车在制动过程中自动调节车轮制动力,防止车轮抱死以 取得最佳制动效果。汽车的前后轮抱死都可能出现危险情 况
18.2 MATLAB中建立仿真模型
在MATLAB中建立仿真模型通常会用到SIMULINK。使用 SIMULINK建立系统仿真模型的具体过程可以参考 MATLAB入门图书或者MATLAB帮助文件,本节只就建 模和建模环境配置等问题进行简单介绍。
18.2.1 SIMULINK建立模型
在Simulink中建立仿真模型的操作过程很简单,打开 Simulink模块库浏览器(Simulink Library Browser)后 ,将仿真模型所用到的模块从模块库浏览器中拖动至模型 窗口并组合起来,就可以完成创建模型的过程。然后通过 设置仿真参数,或采用其他的一些方法可以修改仿真模型 。
有了上节系统模型的理论基础,就可以使用Simulink构建系 统模型。对于已经构建好的模型,可以使用Simulink打开 模型,使用Simulink打开已经建立的 sldemo_absbrake.mdl模型如图18.4所示。
课件下载后可自由编辑,如有不理解
之处可根据本节内容进行提问
Thank you for coming and listening,you can ask questions according to this section and this courseware can be downloaded
在对汽车进行刹车操作进行制动前,车轮以车速相对应的初 始角速度转动,我们使用单独的积分器计算车轮转速和车 速。这里使用两种速度来计算车轮的滑动,由下面的公式 (18.1)确定。需要注意的是,车辆速度采用角速度表示 。 v Vv / Rr (18.1)
ABS-Simulink仿真实战
N
dotmao
1
s
Pm
mao
part5
Terminator3
Integrator
Terminator
T_load part2
T_eng N
T_load
part7
N
edge180
valve timing
ma T_eng
N
part6 30/pi
Gain
mass(k)
mass(k+1)
trigger
compression
29
作业
1、复习各类基本模块; 2、对离合器接合/分离模型进行建模仿真。
30
实战3:防抱死制动系统(ABS)
单轮制动数学模型:
v Vv /Rr
slip1w/v
I
dw
dt
Ff Rr
Tb
mdVv dt
Ff
Ff Fz
f(sli)p
v
Tb
Vv Rr
Ff
Fz
1 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1
12
作业
完成各个子系统的建模。下节课将这些子系统 组装成一个完整的发动机模型。
13
实战1:一个发动机模型
Simulink throttle
模型:
part1
theta
dotmai
Pm
mai
part3
Terminator1
dotmai dotPm
dotmao
Pm
part4
Terminator2
N
dotmao
车轮角速度曲线 紫色:车轮前进速度折算角速度 黄色:车轮实际角速度
基于MATLAB的汽车ABS安全仿真研究
10.16638/ki.1671-7988.2021.05.038基于MATLAB的汽车ABS安全仿真研究田敏,刘革,董兆晨(长安大学汽车学院,陕西西安710064)摘要:文章利用MATLAB软件对汽车制动防抱死系统进行安全仿真研究,选取合适的分析对象,把ABS系统拆成整车模型、轮胎模型以及制动器模型,分别对各模型进行受力以及运动分析,建立数学模型。
最终在Simulink 环境中建立仿真模型,结合整车数据,验证分析了汽车有无ABS系统时的制动效果。
结果显示,装有ABS制动防抱死的汽车制动效果更好。
关键词:汽车防抱死制动系统;数学模型;MATLAB仿真中图分类号:U463.5 文献标识码:A 文章编号:1671-7988(2021)05-134-03Research on Safety Simulation of automobile ABS based on MATLABTian Min, Liu Ge, Dong Zhaochen(School of Automobile, Chang’an University, Shaanxi Xi’an 710064)Abstract: Based on MATLAB, the anti -lock braking system is simulated. The ABS system is divided into vehicle model, tire model and brake model by selecting appropriate analysis object. The force and motion of each model are analyzed respectively, and the mathematical model is established. Finally, the simulation model is established in the Simulink environment, combined with the vehicle data to verify and analyze the braking effect of the vehicle with or without ABS system. The results show that the vehicle equipped with ABS has better braking effect.Keywords: Anti -lock braking system; Mathematical model; Matlab simulationCLC NO.: U463.5 Document Code: A Article ID: 1671-7988(2021)05-134-03前言汽车防抱死制动系统,简称为ABS(Anti-Lock Brake System),在其控制下制动时车轮不抱死拖滑,并且处于最佳的制动状态,使制动距离缩短,制动时的方向稳定性提高,汽车制动时的安全得以保证,交通事故率大大减小[1]。
基于MatlabSimulink的电动汽车仿真模型设计与应用
基于MatlabSimulink的电动汽车仿真模型设计与应用一、本文概述随着全球能源危机和环境污染问题的日益严重,电动汽车作为一种清洁、高效的交通工具,受到了越来越多的关注和推广。
在电动汽车的研发过程中,仿真模型的建立与应用发挥着至关重要的作用。
本文旨在探讨基于Matlab/Simulink的电动汽车仿真模型设计与应用,旨在为电动汽车的设计、优化和控制提供理论支持和实践指导。
本文将对电动汽车仿真模型的重要性进行阐述,指出其在电动汽车研发过程中的地位和作用。
接着,将详细介绍Matlab/Simulink在电动汽车仿真模型设计中的应用,包括其强大的建模功能、灵活的仿真能力以及高效的算法处理能力等。
在此基础上,本文将重点讨论电动汽车仿真模型的设计方法。
包括电动汽车动力系统的建模、控制系统的建模以及整车模型的集成等。
将结合具体案例,对电动汽车仿真模型在实际应用中的效果进行展示和分析,以验证其有效性和可靠性。
本文还将对电动汽车仿真模型的发展趋势进行展望,探讨其在未来电动汽车研发中的潜在应用前景。
通过本文的研究,希望能够为电动汽车仿真模型的设计与应用提供有益的参考和启示,推动电动汽车技术的不断发展和进步。
二、电动汽车仿真模型设计基础电动汽车(EV)仿真模型的设计是一个涉及多个学科领域的复杂过程,其中包括电力电子、控制理论、车辆动力学以及计算机建模等。
在Matlab/Simulink环境中,电动汽车仿真模型的设计基础主要包括对车辆各子系统的理解和建模,以及如何利用Simulink提供的各种模块和工具箱进行模型的构建和仿真。
电动汽车的主要子系统包括电池管理系统(BMS)、电机控制系统(MCS)、车辆控制系统(VCS)以及车辆动力学模型。
这些子系统都需要根据实际的电动汽车设计和性能参数进行精确的建模。
电池管理系统(BMS)建模:电池是电动汽车的能源来源,因此,BMS建模对于电动汽车的整体性能至关重要。
BMS模型需要包括电池的荷电状态(SOC)估计、电池健康状况(SOH)监测、电池热管理以及电池能量管理等功能。
汽车防抱死制动系统设计
摘要防抱死制动控制系统(ABS)是在传统制动系统的基础上采用智能控制技术,在制动时自动调节制动力防止车轮抱死,充分利用道路附着力,提高制动方向稳定性和操纵稳定性,从而获得最大制动力且缩短制动距离,尽可能地避免交通事故发生的机电一体化安全装置。
本文根据防抱死制动控制系统的工作原理,应用汽车单轮运动的力学模型,分析了制动过程中的运动情况。
采用基于车轮滑移率的防抱控制理论,根据车速、轮速来计算车轮滑移率。
以MSP430F149单片机为核心,完成了输入电路、输出驱动电路及故障诊断等电路设计,阐述了ABS系统软件各功能模块的设计思想和实现方法,完成了ABS检测软件、控制软件的设计。
课题所完成的汽车防抱死制动控制系统己通过模拟试验台的基本性能试验,结果表明:汽车防抱死制动控制系统的硬件电路设计合理可行,软件所采用的控制策略正确、有效,系统运行稳定可靠,改善了汽车制动系统性能,基本能够满足汽车安全制动的需要。
本文对汽车防抱死制动系统进行了数学建模,并在Matlab/Simulink 的环境下,对汽车常规制动系统和基于 PID 控制器的防抱死制动系统的制动过程进行了仿真,通过对比分析,验证了基于PID 控制器的汽车防抱死制动系统具有良好的制动性能和方向操纵性。
关键词:防抱死制动系统(ABS);滑移率;控制策略;单片机;建模;仿真;一、电控防抱死系统分类电控防抱死制动系统(ABS)的分类1)按控制方式分可分为单参数控制和双参数控制(ABS)(1)单参数控制(ABS)它以控制车轮的角减速度为对象,控制车轮的制动力,实现防抱死制动,其结构主要由轮速传感器、控制器(电脑)及电磁阀组成。
(2)双参数控制(ABS)双参数控制的ABS,由车速传感器(测速雷达)、轮速传感器、控制装置(电脑)和执行机构组成。
其工作原理是车速传感器和轮速传感器,分别将车速和轮速信号输入电脑,由电脑计算出实际滑移率,并与理想滑移率15%—20%作比较,再通过电磁阀增减制动器的制动力。
基于Simulink的汽车ABS建模与仿真研究
基于Simulink的汽车ABS建模与仿真研究【摘要】本文采用Simulink建模,对ABS模型中的连续系统和离散系统进行仿真,以此来初步确定ABS的参数,并通过仿真结果验证和分析控制逻辑。
仿真模型有效模拟了汽车ABS作用过程,真实地反映汽车ABS系统的实际工作情况,表明ABS在缩短汽车距离上的显著功能。
【关键词】ABS;仿真模型;Simulink随着汽车保有量的不断增长,道路交通事故己成为世界性的社会问题。
众所周知,很多交通事故都是由于车辆制动性能不良所引起的,所以对车辆制动工况的制动性能和稳定性能进行分析和研究很有必要。
制动过程是很复杂的汽车动力学问题,所以在实际路测中会受到很多因素的影响,即使在完全相同条件下测得的结果也可能有较大差异,所以可利用利用计算机进行仿真研究,能够获得更加接近实际的结果,可以对汽车制动工况的各项性能做出宏观上的正确评价。
在现代电子技术的迅速发展的今天,作为汽车主动安全技术的重要体现,车辆制动防抱死系统(ABS),已经普遍安装在各种轿车和载重车上。
它从防止制动过程中车轮抱死的角度出发,避免车辆后轮侧滑和前轮丧失转向能力,提高车辆对地面附着能力的利用率,从而达到改善车辆制动稳定性、操纵性和缩短制动距离等目的。
采用Simulink建模,对ABS模型中的连续系统和离散系统进行仿真。
仿真结果表明,该仿真系统可以比较真实反映出汽车ABS系统的工作过程,显著地缩小了制动距离,提高了安全性。
通过对ABS建立理论模型,并且进行计算机仿真,可初步来确定ABS的参数,还可以通过仿真结果验证和分析控制逻辑。
所以对ABS的仿真分析既减少开发成本,也有效地缩短了开发周期,同时实际ABS性能分析及控制逻辑的模型也可通过少量的试验来验证。
1.汽车防抱死制动系统的组成和工作原理汽车防抱死制动系统由3部分组成:传感器、电控单元( ECU) 和执行器(压力调节器),三部分通过线路连接成一个有机体,形成一个自动控制系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MA S L B uik T A / i 在汽 车 防抱 死 系统 m l n
仿 真 分 析 中 的应 用
口 奇瑞汽车股份有限公司乘用车工程研究三院 黄 巨成 陈志鹏
一
、
引言
力开 始随 滑移 率 的增加 而迅 速增 加 ;
其基 本原 理就 是利 用车 轮 滑移率 的 门
汽车防抱死系统 ( 以下 简 称 A S) B
当 滑 移 率 增 至 某 值 Sp时 ,制 动 力 则 限值 及参 考滑 移 率设计 控 制逻辑 ,使 ot
对 于缩短 汽 车的 制动距 离 、增 加汽 车 随滑移率 的增加而迅 速减少 。公式1 说 得 车 轮 的 滑 移 率 保 持 在 峰 值 附 着 系 数 制动时 的方 向稳定 性 、减少 汽车 制 动 明 了车速 与轮 速 的关 系 :当滑移 率 为 附 近 ,从 而 获 得 最 大 的 地 面 制 动 力 和 过 程 中的侧 滑 以及 提高 汽 车制 动时 的 1 , 车 速 与 轮 速 相 等 ;当 滑 移 率 为 0 最 小的 制动距 离 。 同时获 得较 大的侧 时 安全 性具 有 非常 重要 的意义 。开 发汽 时 ,车轮 已经 处于 抱死 状 态。车 轮抱 向 力 ,保 证制 动 时的侧 向稳 定性 ,汽 车 的A S B 需要通过大量的实车试验来确 B 的基 本工作原理如图2 所示 。 死滑 移时 ,不 仅 制动 力减 少 ,制动强 车A S 定汽车A S 8 系统的结构与工作参数 ,也 度 降 低 , 而 且 车 轮 侧 向 附 着 力 也 大 大 可 以通 过 对 汽 车 A S 统 的 仿 真 研 究 初 B系 减 少 。 因此 ,当前轮 抱 死滑 移 时 ,车 步 确 定 A S 统 的 参 数 ,再 确 定 实 际 汽 8系 、 辆 丧 失 转 向 能 力 ; 而 后 轮 抱 死 滑 移 则 车A 系统 的结构。通过少量的试验验 S B -一 证 发 现 ,后 一 种 方 法 需 要 付 出 小 的 代 属 于不 稳定 工况 ,易引起 车辆 急速 甩
高
-
i
-
皇 t闻
I
的性 能影 响进行 仿真 ,并 对仿 真结 果 移 率 ,以在 获得 良好 侧 向力 的同 时获
进 行 分 析 来 证 明方 法 的可 行 性 。 得较 高 的制动 强度 。 由于路 面 条件 、
/一 , 1
膏 压 蠢
匿 曩 压
时 间
弄 口
钡I 向
力
系 曲线 。 由于路 面 附着 系数 与车 轮滑
移 率 之 间 存 在 非 线 性 关 系 ( 图3 ,图 4 如 )
为在S m 1n 里搭建 的A S u1k B 模型。可以
采 用分 段 线 性 化 在 Sm ln 中 的 lo u i ui k okp
C / M 与制造 业信 息 化 ・ 0 8 第1 期 6 ADCA 2 0年 0 7
=
的滑移率 为02 .,意味着在 未制 动情况 下 车轮 的转 速和车速 的 比值 为08 .。汽 车 的A S B 常采 用逻辑 门限值 控制方法
三 、 建 立模 型
S m 1n 是M T A 的一个附加组 1 u1k A LB 件 ,为 用户 提供 建模 和仿 真 的平 台。 它是 种用 来实 现计 算机 仿真 的软件
价 ,研 究 开 发 周 期 短 ,是 一 般 A S 统 尾 的危 险 。 8系 防 抱 死 制 动 系 统 可 以 通 过 调 节 车 研 究 经 常 采 用 的方 法 。本 文 在 M T A / A L B Sm ln 中搭 建 A S 型 ,j A S 整 车 轮 制动压 力未保证 制 动过 程 的最佳 滑 iu ik B模  ̄ B对 ,
数 字 化 设计
D ii l sg gt a De i n
t ] 建 立 一 个 二 维 表 , 即 为 模 型 中 的 b e a
U S 1 函数。在 附着 系数 u - ] p 和轮胎载 荷W 已 知时 ,可 以得 到车 轮摩擦 力F 。模 型中将 f
液压 控制模型 采用传递 函数加一个控 制器 来代 替 ,模型 的原理 以门限值控制 算法 ,
轮胎 结构 和轮 胎侧 偏 角都 显著 影 响可
/Байду номын сангаас
! —广 一
一
时 间
二 、工 作 原 理
获 得 的 轮 胎 力 , 因此 A S 具 有 自调节 B应 由轮胎 纵 向力特 性 可 知 ,车 轮 的滑 的 能 力 , 以 适 应 各 种 不 同 条 件 。 理 想
移率 决定了制动力和侧向力的大小。 公式l 出了车轮滑移率 的定义。 给
/ R
( 1)
:
1 一 吼
式中,
为车速 ,对应线速度 ,
工具 。S mu n 是 采用模块组合 的方 ] k
制 动 力
廿
法来 创建 动 态系统 的计 算模 型 ,其特 点是快速 准确。u 代表轮胎和 路面之 间
的 附 着 系 数 ,它 与 滑 移 率 之 间 的 关 系 就 是 通 常所 说 的 附 着 系 数 和 滑 移 率 关
为汽 车线 速 度 ,
为车轮线速度 。
为 车轮 半径 ,
如图l 示为车辆在制动行使 时 , 所 地 面作 用于车轮 的制动 力 和侧 向力 随车轮制动 滑移 率 的变 化关系 。 可 以看 出,侧 向力随滑移 率 的增加 而 下 降 ,当滑 移率从 l 降为 0 ,制动 时
Di i l sg gt a De i r
数 字 化 设 计
本文在分析汽车制动 防抱死 系统 ( B A S】 工作原理的基础上 ,利用MA L B Smu 软件作为仿真工具 , T A / i №k
建立 了某 车 的A S 真模 型 ,并 对 仿 真 结 果 进 行 分 析 ,从 而证 明 建 立 的 A S 真 系统 能 较 好 地 模 拟 其 对 汽 车 制 B 仿 B 仿