9 IO端口
芯片io口测电流原理

芯片io口测电流原理
芯片IO口测电流原理涉及到芯片的输入输出端口以及电流测量
原理。
在数字电路中,IO口通常用于与外部设备进行通信,例如传
感器、执行器或其他芯片。
测量IO口的电流可以帮助我们了解芯片
与外部设备之间的电信号交互情况,以及确保电路的正常工作。
首先,让我们来了解一下芯片的IO口。
IO口通常由输入端口
和输出端口组成。
输入端口用于接收外部电信号,输出端口用于向
外部发送电信号。
在芯片内部,IO口通常由晶体管或其他电子元件
构成,这些元件可以控制电流的流动。
测量IO口的电流可以通过多种方式实现,其中一种常见的方法
是使用电流传感器。
电流传感器可以将电流转换为电压信号,然后
通过模数转换器将其转换为数字信号,从而实现对电流的测量。
另一种常见的方法是使用示波器。
通过将示波器的探头连接到
IO口,可以观察到电流的波形和幅度,从而对电流进行测量和分析。
此外,还可以利用欧姆定律来计算IO口的电流。
欧姆定律表明
电流与电压和电阻之间的关系,通过测量IO口的电压和接入电阻,
可以计算出电流的数值。
总之,测量芯片IO口的电流可以通过使用电流传感器、示波器或欧姆定律来实现。
这些方法可以帮助工程师深入了解芯片与外部设备之间的电信号交互情况,从而确保电路的正常工作。
[工作范文]HK2000-A4使用说明书印刷版
![[工作范文]HK2000-A4使用说明书印刷版](https://img.taocdn.com/s3/m/7476891b524de518974b7da3.png)
HK2000-A4系列使用说明书20##6月暂订版如有更改恕不通知序言■感谢您使用HK2000系列电梯控制系统HK2000-A4系由##汉京科技研发团队所开发的电梯控制器之一。
为了满足市场的需求专门开发的一款简单实惠、专用于货梯上的控制系统。
HK2000-A4系列电梯控制器采用了许多先进的技术项目,如高级微处理机DSP芯片、高集成逻辑电路、智能人机接口。
使得该控制系统体积小,操作简单,使用方便。
以下是其主要特点:➢由于采用单PCB板设计,并、串兼容〔四芯串行呼梯〕。
接线极为简单清楚。
在正常状况下,熟练的技术人员均可在一个工作天〔8小时〕内,完成一部变频控制的改造工程。
➢具有抗干扰、高可靠度的串行传输呼梯技术,大大降低安装、维护、检修、备料的成本。
➢液晶微处理机显示面板,使调试电梯简单容易。
➢采用高级双微处理机主副控制,彼此分工协调、互相监督,当任一个微处理机发现通信中断或状况异常时,都会立即切断安全回路,中止运转,以保安全。
➢提供完整的技术转移与技术人员培训服务,是我们责无旁贷的义务。
需要授课与其它服务,请与销售人员接洽。
※读者对象用户电梯控制设计人员电梯调试人员工程维护人员用户技术支援人员使用前注意事项■在使用该产品前请用户确认以下内容◆本产品覆盖范围:1、电梯运行速度:0.5m/s~1m/s2、变频调速或交流双速3、服务层数:串行通讯2~16层站,并行通讯2~8层站4、适用梯种:变频货梯、交流双速货梯、液压电梯◆安全规范:由于有三相380V电压参与的工作,所以在安全操作上应引起高度警觉和重视;在电源接通之前,必须先认真反思所做的准备工作是否充分。
本控制系统是由高灵敏度的16位微机控制器和大功率的变频器共同协作完成控制功能的,所以对它们的安全工作必须绝对重视。
必须小心检查输出运行方向和实际运行方向是否一致,以免调试运行时引起不必要的失误。
以上几点必须严格执行,如有违反,后果自负。
■在使用该产品前请用户注意以下安全注意事项安全注意事项不仅适用于主控电脑板,还适用于与主控电脑板配套的其它各种电子与电气设备。
Zigbee无线单片机CC2530介绍

第三章 ZigBee无线单片机TI 公司的CC2530是真正的系统级SoC芯片,适用于2.4GHz IEEE 802.15.4,ZigBee和RF4CE应用。
CC2530包括了极好性能的一流的RF收发器,工业标准增强型8051 MCU,系统中可编程的闪存,8KB RAM,具有不同的运行模式,使得它尤其适应超低功耗要求的系统,以及许多其它功能强大的特性,结合德州仪器的业界领先的黄金单元ZigBee 协议栈(Z-Stack™),提供了一个强大和完整的ZigBee 解决方案。
CC2530可广泛应用在2.4-GHz IEEE 802.15.4系统, RF4CE遥控控制系统,ZigBee系统,家庭/建筑物自动化,照明系统,工业控制和监视,低功耗无线传感器网络,消费类电子和卫生保健等领域。
3.1 CC2530芯片的特点CC2530是一个真正的用于2.4-GHz IEEE 802.15.4与Zigbee应用的SOC解决方案。
这种解决方案能够提高性能并满足以ZigBee为基础的2.4 GHz ISM波段应用对低成本、低功耗的要求。
它结合了一个高性能2.4 GHz DSSS(直接序列扩频)射频收发器核心和一颗工业级小巧、高效的8051控制器。
CC2530芯片方框图如图3.1所示。
内含模块大致可以分为三类:CPU 和内存相关的模块;外设、时钟和电源管理相关的模块,以及射频率相关的模块。
CC2530在单个芯片上整合了8051兼容微控制器、ZigBee 射频(RF)前端、内存和FLASH存储器等,还包含串行接口(UART)、模/数转换器(ADC)、多个定时器(Timer)、AESl28安全协处理器、看门狗定时器(WatchDog Timer)、32 kHz晶振的休眠模式定时器、上电复位电路(Power 0n Reset)、掉电检测电路(Brown Out Detection)以及21个可编程IO口等外设接口单元。
CC2530芯片采用O.18um CMOS工艺生产,工作时的电流损耗为20 mA;在接收和发射模式下,电流损耗分别低于30 mA或40 mA。
纳博特20.06控制系统操作手册说明书

2020控制系统操作手册20.06纳博特目录第2章安全注意事项 (15)注意事项 (15)第3章产品组装 (16)3.1示教盒安装 (16)3.2控制柜安装 (16)3.2.1线缆要求 (17)3.2.2布线要求 (18)3.2.3接地要求 (18)3.2.4接线注意事项 (19)第4章新机器人配置步骤 (20)第5章机器人的坐标系与轴操作 (26)5.1控制组与坐标系 (26)5.1.1坐标系 (26)坐标系与轴操作 (27)5.1.2关节坐标系 (27)5.1.3直角坐标系 (28)5.1.4工具坐标系 (29)5.1.5用户坐标系 (30)5.2外部轴 (33)第6章示教器按键与界面简介 (34)6.1T20示教器物理按键 (34)6.2T30示教器物理按键 (35)6.3操作系统简介 (37)6.3.1基本说明 (37)6.3.2状态介绍 (37)6.4界面介绍 (38)6.4.1主页 (38)6.4.2用户 (39)6.4.3设置 (41)6.4.4用户坐标标定 (43)6.4.5系统设置 (44)6.4.6远程程序设置 (48)6.4.11Modbus设置 (69)6.4.12后台任务 (71)6.4.13网络设置 (72)6.4.14数据上传 (73)6.4.15程序自启动 (73)6.4.16操作参数 (74)6.4.17工艺 (75)6.4.18变量 (103)6.4.19状态 (105)6.4.20工程 (107)6.4.21程序 (108)6.4.22日志 (109)6.4.23监控 (110)第7章机器人示教与运行 (111)7.1机器人准备 (111)7.1.1开机与安全确认 (111)7.1.2示教器准备 (111)7.2点动操作 (111)7.2.1示教速度调节 (112)7.2.2坐标系说明与切换 (112)7.2.3点动操作 (113)7.3程序编写 (113)7.3.1程序新建/打开/删除/重命名/复制 (113)7.3.2指令操作 (118)7.3.3指令说明(指令规范) (122)7.4程序运行 (142)7.4.1示教模式 (143)7.4.2运行模式 (143)7.4.3远程模式 (143)7.4.4从当前行运行 (145)7.5.4远程IO速度修改方式 (147)第8章工具手与用户坐标 (149)8.1工具手标定 (149)8.1.1工具坐标系 (149)8.1.2TCP:TOOL CENTER POINT,即工具中心点 (149)8.1.3工具坐标系特点 (150)8.1.4工具手参数设置 (151)8.1.57点标定 (152)8.1.612/15点标定 (156)8.1.720点标定 (161)8.1.82点标定 (162)8.2用户坐标系 (163)8.2.1用户坐标系作用 (164)8.2.2用户坐标参数设置 (165)8.2.3用户坐标系标定 (165)第9章数值变量 (167)9.1变量的名称 (167)9.2全局数值变量 (167)9.3全局数值变量使用 (169)9.3.1定义全局数值变量 (169)9.3.2通过计算指令为全局数值变量赋值 (169)9.3.3直接变量赋值 (171)9.3.4使用全局数值变量来计数 (172)9.4局部数值变量 (172)9.5局部变量使用 (173)9.5.1定义局部数值变量 (173)9.5.2使用计算指令为局部变量赋值 (174)9.5.3直接为变量赋值 (174)第10章位置变量 (175)10.1全局位置变量 (175)10.3.4READPOS 指令 (179)10.3.5USERFRAME_SET 指令 (180)10.3.6TOOLFRAME_SET 指令 (180)10.3.7COPYPOS 指令 (180)10.44轴SCARA机器人左右手 (180)10.4.1全局变量设置左右手 (181)第11章条件判断类指令的使用 (183)11.1指令说明 (183)11.1.1CALL (183)11.1.2IF (183)11.1.3ELSE (184)11.1.4ELSEIF (185)11.1.5WHILE (187)11.1.6WAIT (188)11.1.7LABEL (189)11.1.8JUMP (190)11.1.9UNTIL (191)11.1.10CRAFTLINE (192)11.1.11CMDNOTE (192)11.1.12POS_REACHABLE (192)11.1.13CLKSTART (193)11.1.14CLKSTOP (193)11.1.15CLKRESET (193)第12章后台任务 (194)12.1限制 (194)12.2注:运行模式按暂停按钮、远程模式IO暂停只暂停主程序,不暂停后台任务 (194)12.3后台任务编程 (195)12.3.1注意 (195)12.4主程序编程 (195)12.4.1PTHREAD_START(开启线程) (195)12.4.4CONTINUERUN(继续线程) (197)12.4.5STOPRUN (停止运行) (197)12.4.6RESTARTRUN(重新运行) (198)第13章IO、Modbus与远程程序 (199)13.1IO (199)13.1.1输入输出指令 (199)13.1.2I/O功能选择设置 (200)13.1.3IO状态提示设置 (201)13.1.4IO安全设置 (202)13.1.5IO复位 (202)13.1.6IO配置 (203)13.1.7使能IO (204)13.1.8报警消息 (205)13.1.9端口名称 (205)13.1.10远程模式IO预约简要说明 (206)13.2远程程序设置 (208)13.3复位点设置 (208)13.4远程功能的使用(IO) (209)13.4.1远程功能概述 (209)13.4.2远程功能使用步骤 (209)13.4.3编写程序 (209)13.4.4设置远程程序 (209)13.4.5设置IO (210)13.4.6切换到远程模式 (210)13.4.7预约排序 (210)13.4.8运行 (211)13.5Modbus修改地址码 (211)13.6Modbus的使用 (214)13.6.1ModBus功能概述 (214)13.6.2Modbus触摸屏使用流程 (214)第14章多机模式与双机协作 (218)14.1设置机器人 (218)14.2切换机器人 (219)第15章视觉工艺 (222)15.1视觉参数设置 (222)15.2视觉范围设置 (224)15.3 (225)15.4视觉位置参数 (225)15.5位置调试 (226)15.6视觉运作方式 (226)15.7视觉指令 (226)15.7.1VISION_RUN (226)15.7.2VISION_TRG (227)15.7.3VISION_POSNUM (227)15.7.4VISION_POS (227)15.7.5VISION_CLEAR (227)15.7.6VISION_END (227)15.8使用示例 (228)15.8.1抓取应用 (228)第16章传送带跟踪 (229)16.1参数设置 (229)16.1.1基本信息 (229)16.1.2识别参数 (230)16.1.3传送带标定 (230)16.1.4传感器标定 (233)16.1.5位置设置 (235)16.2编写程序 (236)16.2.1CONVEYOR_ON指令 (236)16.2.2CONVEYOR_OFF指令 (237)16.2.3CONVEYOR_CHECKPOS指令 (237)16.2.4CONVEYOR_CHECKEND指令 (237)16.3示例 (237)16.3.1使用传感器、MOVJ走轨迹 (237)16.3.2使用传感器、外部发点功能走轨迹 (238)16.3.3视觉传送带跟踪 (238)第17章外部传输点 (240)17.2通讯方式 (241)17.2.1点位存放的数据 (241)17.2.2示例 (242)17.2.3指令 (242)第18章外部通讯 (243)18.1TCP协议 (243)18.1.1参数设置 (243)18.1.2指令 (243)18.1.3READCOMM (244)18.1.4OPENMSG (245)18.1.5CLOSEMSG (245)18.1.6PRINT (245)18.1.7MSG_CONN_ST (245)第19章数据上传 (246)19.1基本设置 (246)19.2数据格式 (246)19.2.1生成csv文件示例 (247)第20章机器人日志 (249)20.1示教器日志查看 (249)日志说明 (249)操作日志:此类型日志保存用户的基本操作,例如新建程序、重命名程序插入指令等。
MACH_CNC接口板说明

采取正确的隔离措施可以增强设备的抗干扰。尽管外部信号电缆的正确铺设及接地可以在很大程度上减弱外部干扰的影响,但干扰不会就此得以根治,在信号进入计算机采集系统时加入一定的隔离是非常有效的,它不仅可以隔离掉外部的干扰信号,同时还可以对主机形成一定的保护,使主机不会由于外部强干扰而造成损坏,目前采用最多的则是光电隔离法,如图所示:
c、开关式接近传感器
这类传感器一般是四根线,其中的两根线是电源下与电源地,另外的两根线是开关的线,当物体远离传感器时,两线之间开路,当物体接近传感器时,两线闭合。
(三)电源端口
没有标出的两位是隔离电源端,这里没有使用。
GND VIN 12V 5V
电源口VIN输入13-24V直流电压,电流2A以上,可用12V的开关电源。这时12V 5V为稳压输出,也可不用VIN,直接在12V的端口输入12V的电源。
1、其中3个5V为输出电压
2、AGND为模拟地,GND为地,该板AGND与GND是相通的,没有区分
3、P2 P3 P4 P5 P6 P7 P8 P9 P14 P1 P16 P17为并口的12个输出脚的,一般在MACH中P2\P3\P4\P5\P6 \P7六个IO口用作X Y Z三个轴的脉冲与方向控制。
一、主要特点
1、提供十二路OC(集电集开路方式)输出,输出端口可直接驱动固态继电器。
2、十二路光电隔离共地信号输入。
3、全部输入输出信号指示。
4、单电压13 - 24VDC(其它电压需定制)。
5、电脑并口所有输出信号经施密特触发器整形,提高数字信号传输的抗干扰。
最全的STM32八种IO口模式讲解(已经标注,新手必备)
以及上拉输入、下拉输入、浮空输入、模拟输入的区别最近在看数据手册的时候,发现在Cortex-M3里,对于GPIO的配置种类有8种之多:(1)GPIO_Mode_AIN 模拟输入(2)GPIO_Mode_IN_FLOATING 浮空输入(3)GPIO_Mode_IPD 下拉输入(4)GPIO_Mode_IPU 上拉输入(5)GPIO_Mode_Out_OD 开漏输出(6)GPIO_Mode_Out_PP 推挽输出(7)GPIO_Mode_AF_OD 复用开漏输出(8)GPIO_Mode_AF_PP 复用推挽输出对于刚入门的新手,我想这几个概念是必须得搞清楚的,平时接触的最多的也就是推挽输出、开漏输出、上拉输入这三种,但一直未曾对这些做过归纳。
因此,在这里做一个总结:推挽输出:可以输出高,低电平,连接数字器件; 推挽结构一般是指两个三极管分别受两互补信号的控制,总是在一个三极管导通的时候另一个截止。
高低电平由IC的电源低定。
推挽电路是两个参数相同的三极管或MOSFET,以推挽方式存在于电路中,各负责正负半周的波形放大任务,电路工作时,两只对称的功率开关管每次只有一个导通,所以导通损耗小、效率高。
输出既可以向负载灌电流,也可以从负载抽取电流。
推拉式输出级既提高电路的负载能力,又提高开关速度。
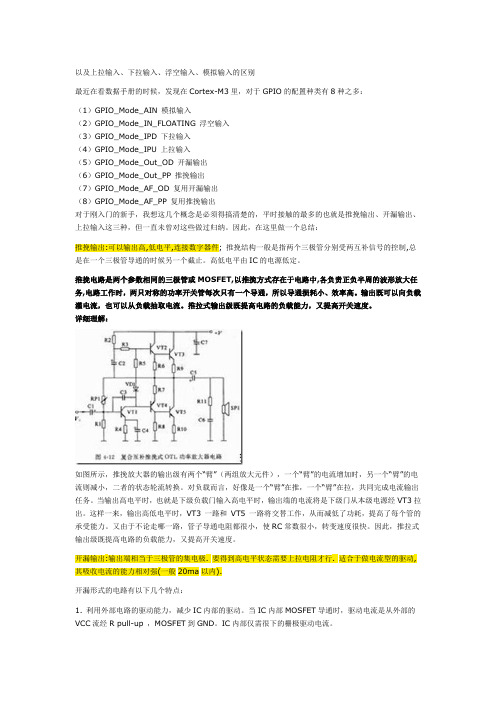
详细理解:如图所示,推挽放大器的输出级有两个“臂”(两组放大元件),一个“臂”的电流增加时,另一个“臂”的电流则减小,二者的状态轮流转换。
对负载而言,好像是一个“臂”在推,一个“臂”在拉,共同完成电流输出任务。
当输出高电平时,也就是下级负载门输入高电平时,输出端的电流将是下级门从本级电源经VT3拉出。
这样一来,输出高低电平时,VT3 一路和VT5 一路将交替工作,从而减低了功耗,提高了每个管的承受能力。
又由于不论走哪一路,管子导通电阻都很小,使RC常数很小,转变速度很快。
因此,推拉式输出级既提高电路的负载能力,又提高开关速度。
单片机io口上拉电阻 -回复
单片机io口上拉电阻-回复单片机是现代电子领域中的重要组成部分,它在各种设备和系统中起着至关重要的作用。
其中,IO口又称为输入输出端口,是单片机与外部设备进行数据交互的关键接口。
在使用IO口时,我们经常会遇到上拉电阻的概念。
本文将详细介绍单片机IO口上拉电阻的原理、作用以及在实际应用中的步骤。
首先,我们需要了解什么是上拉电阻。
上拉电阻是一种电阻器,它通过连接到电源电压的引脚,将引脚的电位拉高。
在单片机中,上拉电阻通常与输入引脚相连,其作用是使输入引脚保持一个确定的电平状态,防止其浮动或干扰。
单片机中的IO口通常具有三种状态:输入状态、输出状态和上拉输入状态。
其中,上拉输入状态指的是当IO口不连接外部设备时,IO口被配置为输入状态,并通过上拉电阻将引脚电平拉高。
这样可以有效避免线路存在悬空状态或电磁干扰导致的误操作。
接下来,我们将详细介绍如何在单片机中实现IO口上拉输入。
在大多数单片机中,上拉输入状态是通过软件配置来实现的。
我们可以通过上拉寄存器或引脚配置寄存器来设置IO口的工作状态。
以STM32系列单片机为例,我们可以通过设置GPIO的控制寄存器来控制IO口的属性和工作方式。
具体步骤如下:1. 确定选择哪个IO口进行上拉输入,比如选择PA0口。
2. 找到PA0对应的GPIO控制寄存器,通常为GPIOA->CRH 或者GPIOA->CRL,根据引脚所在的引脚组进行选择。
3. 在对应的寄存器中,找到对应的位数,即PA0在控制寄存器中所占的位数,通常为0位或者1位。
4. 将对应的位设置为1,以使引脚工作在上拉输入状态。
接下来,我们来看一个具体的实例。
假设我们需要将PA0设置为上拉输入状态,实现按键检测功能。
1. 首先,我们需要在程序中包含相应的头文件,比如#include"stm32f10x_gpio.h"。
2. 然后,我们需要初始化引脚,使用GPIO_Init函数进行配置。
io板工作原理
io板工作原理io板是一种常见的电子元件,它在许多电子设备中发挥着重要的作用。
io板的工作原理是什么呢?在本文中,我们将详细介绍io板的工作原理及其应用。
让我们来了解io板的基本结构。
io板通常由多个输入和输出端口组成,每个端口都可以与其他电子设备连接。
这些端口可以接收来自外部设备的输入信号,并向外部设备发送输出信号。
例如,io板可以连接到传感器,接收传感器采集到的数据,并将数据发送给处理器进行处理。
io板的工作原理可以简单地概括为输入和输出。
当外部设备发送输入信号到io板的某个端口时,io板会将该信号转换为适合处理器处理的形式,并将其发送给处理器。
处理器会根据接收到的信号进行相应的处理,并将结果发送给io板。
io板再将处理器的输出信号转换为适合外部设备接收的形式,并将其发送给外部设备。
io板的工作原理可以进一步分为几个步骤。
首先,io板需要接收来自外部设备的输入信号。
这些输入信号可以是来自传感器的数据、按键的状态等。
io板通过端口接收到输入信号后,将其转换为数字信号或模拟信号,以便处理器可以进行处理。
接下来,io板将处理器处理后的输出信号转换为适合外部设备接收的形式。
这些输出信号可以是控制信号、显示信号等。
io板通过端口将输出信号发送给外部设备,并确保信号的稳定性和准确性。
在实际应用中,io板可以应用于各种电子设备中。
例如,在智能家居系统中,io板可以接收来自传感器的数据,并控制家电设备的工作状态。
在工业自动化系统中,io板可以接收来自各种传感器的数据,并根据数据进行相应的控制和调节。
io板还可以与其他设备进行通信。
例如,io板可以与处理器、存储器等设备进行通信,以实现数据的传输和处理。
它还可以与网络设备进行通信,实现远程控制和监控。
io板是一种重要的电子元件,它通过接收和发送信号的方式与其他设备进行通信。
io板的工作原理可以简单地概括为输入和输出,它通过端口接收输入信号,并将其转换为适合处理器处理的形式,然后将处理器的输出信号转换为适合外部设备接收的形式。
第六章IO接口与总线
三种数据传送方式: 程序控制方式:无条件程序控制和程序查询 中断控制方式 直接存储器存取方式,DMA方式
第六章 I/O接口 和 总线
6.1 I/O接口概述ຫໍສະໝຸດ 一、 I/O接口的功能 二、简单的输入输出接口芯片 三、I/O端口及其寻址方式 四、CPU与外设间的数据传送方式
6.2 总线
回顾:
CPU
控 制 器
运算器 寄存器
DB AB
CB
存储器 00000H
~ FFFFFH
I/O接口 0000H
~ FFFFH
I/O外设
接口电路的结构
实现对CPU数据总线速度 和驱动能力的匹配
DB 总线驱动
主 AB 地址译码
机 CB 控制逻辑
数据 缓冲器
状态 寄存器
控制 寄存器
数据信息
外 状态信息 设
控制信息
接CPU一侧 接外设一侧
接口
端口
实现各寄存器端口
实现接口电路中的各寄存器端口的
寻址操作
读/写操作和时序控制
I/O端口
传送这三种信息的接口电路中的寄存器称为数据 端口、状态端口和控制(命令)端口
存储器映像方式 I/O独立编址方式
两种编址方式比较(一)
内 存 空 间
分别是分离 编址?还统
一编址?
I/O 空 间
内
存
I/O
空
空
间
间
(1)存储器映像编址
指I/O端口与存储器共享一个寻址空间,又称为统一编 址。在这种系统中,CPU可以用同样的指令对I/O端口 和存储器单元的进行访问。
引脚K的IO端口资源列表
1. 硬件最小系统引脚K60N512VM100芯片电源类引脚,BGA封装22个,LQFP封装27个,其中BGA封装的芯片有五个引脚未使用(A10、B10、C10、M5和L5)。
芯片使用多组电源引脚分别为内部电压调节器、I/O引脚驱动、A/D转换电路等电路供电,内部电压调节器为内核和振荡器等供电。
为了电源稳定,MCU内部包含多组电源电路,同时给出多处电源引出脚,便于外接滤波电容。
为了电源平衡,MCU提供了内部相连的地的多处引出脚,供电路设计使用。
复位引脚RESET是一个专用引脚,内部含有上拉电阻。
空闲状态为高电平,低电平迫使芯片复位。
在写入器电路中,该引脚被连接到标准的10芯JTAG接口,以便写入器可以使MCU复位。
2.I/O端口资源类引脚除去需要服务的引脚外,其它引脚可以为实际系统提供I/O服务。
芯片提供服务的引脚也可称为I/O端口资源类引脚。
MK60N512VMD100(144引脚BGA和LQFP封装)100个I/O引脚名、引脚号及功能描述。
许多引脚具有复用功能。
这些引脚在复位后,立即被配置为高阻状态,且为通用输入引脚,没有内部上拉电阻。
需要注意的是,为了避免来自浮空输入引脚额外的漏电流,应用程序中的复位初始化例程需尽快使能上拉或下拉,也可改变不常用引脚的方向为输出,以使该引脚不再浮空。
ADC、DAC和USB引脚,以下引脚是MK60N512VMD100单独列出来的。
除去需要服务的引脚外,其它引脚可以为实际系统提供I/O服务。
芯片提供服务的引脚也可称为I/O端口资源类引脚。
MK60N512VMD100(144引脚LQFP封装)的有多达100个I/O引脚。
其中A口26个,B口20个,C口20个,D口16个,E口18个,每个引脚均具有多个功能,详细情况请参见表2-表5。
表1 PTA口的26个引脚功能详述表2 PTB口的20个引脚功能详述表3 PTC口的20个引脚功能详述表4 PTD口的16个引脚功能详述表5 PTE口的18个引脚功能详述。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第九章I/O端口
概述
S3C2410有117个多功能的输入输出引脚,这些端口是:
—端口A(GPA):23个输出口
—端口B(GPB):11个输入输出口
—端口C(GPC):16个输入输出口
—端口D(GPD):16个输入输出口
—端口E(GPE):16个输入输出口
—端口F(GPF):8个输入输出口
—端口G(GPG):16个输入输出口
—端口H(GPH):11个输入输出口
每个端口可以根据系统配置和设计需求通过软件配置成相应的功能。
在启动主程序之前,必须定义好每个引脚的功能。
如果某个引脚不用作复用功能,则可以将它配置成IO脚。
初始的引脚状态被无缝配置好的以避免产生问题。
表1 端口配置见英文版Table 9-1. S3C2410A Port Configuration
端口控制描述
端口控制寄存器(GPACON-BGHCON)
在S3C2410中,大部分端口都是复用的,因此需要决定每个引脚使用哪个功能。
端口控制寄存器PnCON决定每个引脚的功能。
如果GPF0 – GPF7 and GPG0 – GPG7用于掉电模式的唤醒信号,这些端口必须被配置成中断模式。
端口数据寄存器(GPADAT-GPHDAT)
如果端口被配置成输出端口,可以向PnDAT中的相关位写入数据;如果端口被配置成输入端口,可以从PnDAT中的相关位读入数据。
端口上拉电阻寄存器(GPBUP-GPHUP)
端口上拉电阻寄存器控制每个端口组的上拉电阻的使能和禁止。
当相关位为0,上拉电阻使能;当相关位为1,上拉电阻禁止;
当端口上拉电阻寄存器使能时,不管引脚选择什么功能(输入、输出、数据、外部中断等),上拉电阻都工作。
外部中断控制寄存器(EXTINTN)
24个外部中断可响应各种信号请求方式。
EXTINTn寄存器可以配置如下信号请求方式:低电平触发、高电平触发、上升沿触发、下降沿触发、双边沿触发。
这8个外部中断引脚具有数字滤波器。
(见EINTFLTn相关)
只有16个外部中断引脚(EINT [15:0])被用于唤醒源。
掉电模式和IO口
所有的GPIO寄存器的值在掉电模式下被保存。
这在时钟功率管理模块中的掉电模式下提到。
EINTMASK不能禁止从掉电模式唤醒,但是如果EINTMASK屏蔽了EINT[15:4]中的1位,系统可以被唤醒,但是SRCPND中的EINT4_7 bit and EINT8_23 bit不会在唤醒后被置1。
IO口控制寄存器
端口A控制寄存器(GPACON/GPADAT)
注意:ADDR[15:1]并没有端口寄存器,但是有对应的引脚,它们仅用作地址总线,而且A端口默认为ADDR功能,没有内部上拉电阻。
端口B控制寄存器(GPBCON, GPBDAT, and GPBUP)
端口C-H与B类似,具体参加英文版。
MISCELLANEOUS CONTROL REGISTER (MISCCR) USB相关端口由USB主机或者设备寄存器控制。
DCLK CONTROL REGISTERS (DCLKCON)
此寄存器定义DCLKn信号,作为外部资源的时钟。
如何设置DCLKn信号见下表。
只有当CLKOUT[1:0]设置为发生DCLKn信号时DCLKCON寄存器才会生效。
外部中断控制寄存器(EXTINTn)
24个外部中断可响应各种信号请求方式。
EXTINTn寄存器可以配置如下信号请求方式:低电平触发、高电平触发、上升沿触发、下降沿触发、双边沿触发。
由于EINT[15:0]具有滤波功能,EXTINTn引脚上的逻辑电平必须保持至少40ns,才能正确识别中断。
注意:EINT16-23可以被设置为快速中断模式,通过EXTINT2的3、7、11……位设置,
(EINTFLTn)寄存器控制EINT[23:16]这8个外部中断的过滤器时间。
EINTMASK控制EINT[23:4]这20个外部中断的屏蔽与否。
注:复位后,这些中断默认都是被屏蔽掉的。
只有EINT[23:4]这20个外部中断受EINTPENDn寄存器控制,可以通过向寄存器的相应位写入“1”来清零这一位。
通用状态寄存器(GSTATUSn) 你。