月球探测器软着陆机构展开动力学仿真分析
月球探测器软着陆冲击力学环境研究
月球着陆器软着陆机构着陆稳定性仿真分析
第30卷第5期2009年9月宇 航 学 报Journal o fA stronauticsV o.l 30Septe mberN o .52009月球着陆器软着陆机构着陆稳定性仿真分析朱 汪,杨建中(中国空间技术研究院总体部,北京100094)摘 要:介绍了软着陆机构仿真模型,提出了着陆稳定性判据和稳定性边界的离散化搜寻策略,并以实际算例给出了由着陆器着陆瞬时的竖直速度、水平速度、偏航角和月面倾角等主要影响因素确定的着陆稳定性边界。
分析结果表明:对称着陆比非对称着陆更稳定;横向速度较大时支柱联接点容易发生强度破坏;当着陆面存在坡度时,横向速度沿下坡方向相对于沿上坡方向而言,着陆器更容易翻倒。
关键词:着陆稳定性;着陆冲击;软着陆机构;月球着陆器中图分类号:V 47;TB36 文献标识码:A 文章编号:1000-1328(2009)05-1792-05DO I :10.3873/.j issn .1000-1328.2009.05.008收稿日期:2008-11-27; 修回日期:2009-01-100 引言成功着陆是任何着陆探测任务的先决条件。
月球着陆器进入下降轨道后,先由反推发动机减速,同时通过姿态控制系统调整姿态,到达一定高度后关闭发动机自由下落。
月球探测器的着陆质量从数百千克到数千千克,着陆瞬时速度从几米每秒到几十米每秒。
对于采用软着陆机构进行缓冲的着陆器而言,主/辅缓冲器是吸收并耗散着陆冲击能量的核心组件。
月球着陆器的着陆稳定性是指在着陆过程中,通过软着陆机构的主/辅缓冲器吸收冲击能量,保证着陆器不翻倒的可靠性。
着陆稳定性分析不仅要明确各个影响因素,而且由于着陆器机动性能的局限性和月面地理环境的复杂性,分析过程中必须考虑各影响因素的具体参数在较宽范围内变化时着陆器的响应情况,保证着陆器的稳定着陆。
着陆稳定性的影响因素包括着陆器相关参数、月壤力学特性及月貌分布、发动机关机时延特性及尾喷管撞击月面和燃料储箱的晃液动力学效应等[1]。
航空航天技术中的结构动力学分析与仿真

航空航天技术中的结构动力学分析与仿真航空航天技术的发展离不开结构动力学分析与仿真。
在航空航天领域,结构动力学分析与仿真是评估和改进载荷、振动与静态应力以及结构疲劳寿命等关键参数的重要手段。
本文将讨论航空航天技术中的结构动力学分析与仿真的意义、方法以及应用。
一、结构动力学分析的意义结构动力学分析是通过模拟载荷情况下结构的振动和应力响应,来评估结构的可靠性和安全性。
在航空航天工程中,结构动力学分析有以下几个重要意义:1. 评估结构可靠性:结构动力学分析能够通过模拟不同的载荷情况,分析结构的振动和应力响应,从而评估结构的可靠性和安全性,为设计和改进结构提供依据。
2. 优化结构设计:结构动力学分析可以帮助工程师发现结构中的问题和瓶颈,从而优化结构的设计。
通过分析振动模态以及应力分布等参数,可以针对性地提出结构改进的方案,提高结构的性能和可靠性。
3. 降低结构疲劳寿命:结构动力学分析可以通过模拟结构的振动和应力响应,评估结构的疲劳寿命。
通过合理设计和调整结构的刚度和减振装置,可以降低结构的疲劳损伤,延长结构的使用寿命。
二、结构动力学分析的方法结构动力学分析主要涉及模态分析、应力分析和疲劳寿命评估等方法。
下面分别介绍这些方法:1. 模态分析:模态分析是分析结构的振动特性和模态形态的方法。
通过利用有限元分析软件,可以计算和分析出结构中的振动特征模态,包括自由振动模态和强迫振动响应模态。
模态分析结果可以帮助确定结构的固有频率、振动模态和模态质量等信息。
2. 应力分析:应力分析是研究结构在不同载荷下的应力分布和应力集中的方法。
通过建立结构的有限元模型,在给定的载荷条件下,可以计算结构中各点的应力响应。
应力分析可以帮助发现结构中的应力集中区域和高应力区域,从而进行优化设计和改进。
3. 疲劳寿命评估:疲劳寿命评估是通过模拟结构在不同工况下的应力响应,计算并评估结构的疲劳寿命。
疲劳寿命评估是航空航天技术中非常重要的一部分,可以帮助确定结构的使用寿命和维修周期,保证结构的可靠性和安全性。
月球探测器软着陆精确建模及最优轨道设计
Fig. 1 C oordinate systems
→
→
→
→
→
→
→
→
(4)
对式 ( 4) 进行求导 ,可以得到探测器相对于惯性空间 的加速度为 dVI dt
→
按右手坐标系确定 。oxL yL zL 为月固坐标系 , 参考平 面是月球赤道面 , oxL 沿月球赤道面与起始子午面 的交线方向 , oyL 沿月球自转轴方向 , 该坐标系是右 手坐标系。 Ax 1 y1 z1 为原点在探测器的轨道坐标系 ,
0 引言 月球是距离地球最近的天体 , 对月球资源和环 境进行科学研究和考察 ,是人类走出地球 , 探索未知 世界所必需 经历的 重要步骤 。从 1959 年 至今 , 美 国、 前苏联和日本三个国家已成功地实现了对月球 的探测 。随着航天科技的不断发展 , 我国的月球探 测计划 “嫦娥工程” 也已经顺利展开 。 由于月球没有大气 ,探测器着陆时无法利用大气 制动 ,只能利用制动发动机来减速 , 在很大程度上限 制了探测器所能携带有效载荷的质量 。探测器在月 面着陆可以分为硬着陆和软着陆 。硬着陆对月速度 不受限制 ,探测器撞上月球后设备将损坏 , 只能在接 近月球的过程中传回月面信息 ;软着陆对月速度比较 小 ,探测器着陆后可继续在月面进行考察 , 因此相比 于硬着陆 ,软着陆更具有实用意义。目前已发表的文 献中探测器的动力学模型大多都是采用二维模型 , 即 假设月球探测器在一个固定的铅锤面内运动 , 没有考 虑侧向运动 ,而且所采用的模型都是在忽略月球自转 的基础上得到的 。但由于发动机安装偏差、 姿控 系统误差和月球自转等因素的存在 ,探测器难以保证 始终在固定的铅锤面内运动。文献 [9] 虽然考虑了探 测器在三维空间的运动 ,但所用模型经过了较高程度 的简化 , 将月球引力场假设为平行定常引力场 , 并且 没有考虑月球自转对系统的影响。 对于两点边值问题 ,除了某些特殊系统外 ,通常 难以求得最优控制规律的解析表达式 。因此 , 必须
未来月球及深空探测中的动力学环境问题

未来月球及深空探测中的动力学环境问题
杨艳静,樊世超,张俊刚,杨 江,张文兵,王辰星
(北京卫星环境工程研究所,北京 100094)
摘要:近年来,越来越多的空间机构将月球和深空探测作为未来空间探测的重点。未来随着深空探 测任务复杂度的增加,其面临的动力学环境也更加复杂。文章分析了月球和深空探测过程中所面临的动 力学问题,介绍了现有月球和深空探测中主要动力学环境试验的情况,最后提出了未来月球和深空探测 所面临的动力学环境模拟挑战和建议。
Abstract: The lunar and deep space explorations have become a focus according to the plans of many space organizations. As the complexity of the mission increases, the induced dynamic environment becomes more severe. The dynamic environment during lunar and deep space explorations is analyzed in this paper, with an introduction of the related dynamic tests performed on ground. Finally, the challenges of the dynamic environmental modeling in the future lunar and deep space explorations are highlighted and some suggestions are made.
3)未来长期载人任务给人机工程匹配、人工重 力环境营造等提出了新的要求。
月球软着陆飞行动力学和制导控制建模与仿真
⎧tan−1 (Y X ),
X > 0,Y > 0,
αL
=
⎪⎪ ⎨
tan
−1
(Y
X ) + π,
X < 0,
⎪ ⎪⎩
tan
−1
(Y
X ) + 2π,
X > 0,Y < 0,
βL = cos−1 (Z r).
(7)
由(7)式即可求得赤经和赤纬的变化量: ΔαL = αLf −αL0, ΔβL=βLfБайду номын сангаас−βL0. 于是, 由下式即得软着陆初始下 降点的经纬度λL0 和ϕL0, 如下
收稿日期: 2008-08-01; 接受日期: 2008-11-01
摘要 着重对月球软着陆制动段、接近段和着陆段的飞行动力学模型进行了研究, 同时基 于动力学模型对各阶段制导律进行了优化设计. 制动段飞行时间和距离较长, 拟采用均匀球 体模型, 该模型也是软着陆全过程下降轨迹分析和动力学仿真的基础; 制导律设计中考虑到 该段燃料消耗很大, 主要以燃料最优为设计指标. 接近段距离月面较近, 且经姿态调整后接 近垂直下降, 拟采用平面月球模型; 制导律设计采用基于重力转弯技术的最优开关制导律. 着陆段几乎垂直下降, 动力学模型可在平面月球模型的基础上简化为一维垂直下降模型, 制 导律设计拟在垂直方向采用简单的程序制导方式. 最后, 在考虑测量、推力误差以及环境干 扰等影响下对着陆精度进行了初步仿真分析, 结果表明, 给出的软着陆三阶段动力学模型和 制导律是可行的.
首先需要获得软着陆过程赤经赤纬的变化. 这 里需要利用软着陆下降轨迹设计的一个结论: 软着 陆下降轨迹平面在环月停泊轨道平面内.
月球软着陆控制系统综合仿真及分析(课程设计)
月球软着陆控制系统综合仿真及分析(课程设计)在月球探测带来巨大利益的驱使下,世界各国纷纷出台了自己的探月计划,再一次掀起了新一轮探月高潮。
在月球上着陆分为两种,一种称为硬着陆,顾名思义,就是探测器在接近月球时不利用制动发动机减速而直接撞击月球。
另一种称为软着陆,这种着陆方式要求探测器在距月面一定高度时开启制动系统,把探测器的速度抵消至零,然后利用小推力发动机把探测器对月速度控制在很小的范围内,从而使其在着陆时的速度具有几米每秒的数量级。
显然,对于科学研究,对探测器实施月球软着陆的科学价值要大于硬着陆。
1月球软着陆过程分析目前月球软着陆方式主要有以下两种方式:第一种就是直接着陆的方式。
探测器沿着击中轨道飞向月球,然后在适当的月面高度实施制动减速,最终使探测器软着陆于月球表面。
采用该方案时,探测器需要在距离目标点很远时就选定着陆点,并进行轨道修正。
不难发现,该方法所选的着陆点只限于月球表面上接近轨道能够击中的区域,所以能够选择的月面着陆点的区域是相当有限的。
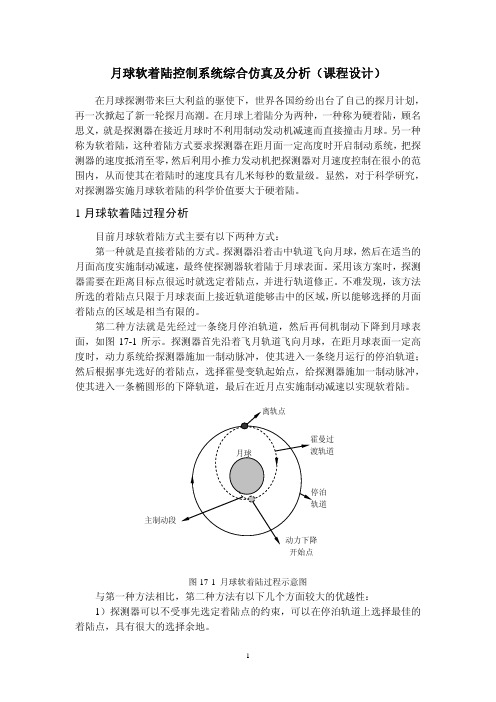
第二种方法就是先经过一条绕月停泊轨道,然后再伺机制动下降到月球表面,如图17-1所示。
探测器首先沿着飞月轨道飞向月球,在距月球表面一定高度时,动力系统给探测器施加一制动脉冲,使其进入一条绕月运行的停泊轨道;然后根据事先选好的着陆点,选择霍曼变轨起始点,给探测器施加一制动脉冲,使其进入一条椭圆形的下降轨道,最后在近月点实施制动减速以实现软着陆。
主制动段开始点图17-1 月球软着陆过程示意图与第一种方法相比,第二种方法有以下几个方面较大的优越性:1)探测器可以不受事先选定着陆点的约束,可以在停泊轨道上选择最佳的着陆点,具有很大的选择余地。
2)在停泊轨道上,可以对探测器上的设备进行全面的检查、修正,为下一步的霍曼变轨段做好准备。
如果是载人登月,停泊轨道还可以给航天员以充足的准备时间,做好心理等方面的准备。
3)由于可以把轨道舱停留在停泊轨道上,而只控制着陆舱(包括下降发动机、推进剂、GNC 系统和在月面上作业的有效载荷等)降到月球表面,故可以减少探测器着陆部分的质量,从而减少着陆过程推进剂的消耗。
月球探测器软着陆机构发展综述

4
展开机构 展开并锁定着陆腿 ,起辅助支撑作用
3 1 向上收 拢的 三腿 式软着 陆机 构 .
向上收 拢 的三腿 式软 着陆 机构 主要应 用 在质量 较 轻 的探测器 上 。美 国勘 察者 系列 探测 器采 用 了
向上 收拢 的三腿 式软 着陆 机构【 。 3 ]
探测器 发射 前 ,着陆 腿呈 向上 收拢状 ,能较好 地 满足 运载 火箭 整流 罩 的尺寸 要求 。当探测 器进 入奔 月轨道 后 ,地 面站发送 指令 ,展开 机构 的火 工装 置 点 火解 锁 ,推动 着 陆 腿运 动 到 工 作 位 置后 ,
图 2 向上收拢的三腿式软着陆机构 的收拢 和展开状态
注 : 图 中虚 线 为 收 拢 状 态 。实 线 为展 开 状 态
/J
此相 同 。该 着陆 机构 的着 陆腿是 桁 架式 的 ,质
量较大 ,但 能抵 抗较 大 的横 向冲击 。相 对 四腿
式软着 陆机 构而 言 ,三腿 式软着来自陆 机构 系统 冗 月
余小 ,可靠 性略 低 。
3 2 向下收 拢 的四 腿式软 着 陆机构 . 随着 探 测 器 质 量 越 来 越 大 ,诸 如 月球 一7 1
再次 被锁定 ] 。工作原 理见 图 2 。 探测器 着陆 面积 大 ,则稳定 性好 。若 底 部
离月球 表 面 距 离 较 小 ,则 缓 冲器 的 工 作 行 程
短 ,冲击加 速度 较 大 ( 1g ) 约 5 。这 里 ,g 为 地球 重力加 速 度 ,下 文 出现 的 g 的 含 义 也 与
摘要 综述 了月球探 测 器软 着 陆机构 的发展 概 况 ;分析 了国 际上 月球 探 测 器软 着 陆机
构 的结构 组成 、工作 原理及 特 点 。对 不 同展 开机构 和缓 冲 器特 点进 行 了分析 ,预 测 了月球
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
DOI 1 3 7 /. s .0 0 1 2 2 0 0 0 6 :0.8 3 ii n 10 —3 8.01 .2.0 s
0 阶 段 的 运 动 特 性 , 别 是 缓 冲 特 特
性 “ 是 研究 较 为集 中 的部 分 , 测 器 在 发 射 阶段 探 运 载器 内 的振 动 特 性 也 有 研 究 。但 对 于软 着 陆 机 构展 开 动力学 过 程 , 究较 少 , 研 主要 是对 机构 展开
原理 的介绍 。文 献 [2 在所 设计 的展 开/ 定 机 构 1] 锁
软着 陆机 构是 登 月探 测器 的重 要组 成部 分 。从 结构 上看 , 冲支 撑 杆组 ( 括 构 型 , 对 舱 体 的 布 缓 包 相 置 ) 缓 冲器 及 展 开/ , 锁定 机 构 是 设 计 中三 个 主 要 部
型采 用 四 支 撑 悬 臂 式 软 着 陆 机 构 的月 球 探 测 器 在 A A S中 建 立 了 虚 拟 样 机 模 型 , 别 就 主 着 陆 腿 系 统 结 构 柔 DM 分
性 , 着 陆 腿 与 基 体 连 接 问 隙 , 开 驱 动 力 及 探 测 器 自旋 等 因 素 对 软 着 陆 机 构 展 开 过 程 的 影 响 进 行 了 仿 真 分 析 。 主 展 结 果 表 明 , 机 构 展 开锁 定 瞬 间 由 于 结 构 柔 性 会 产 生 难 以 衰 减 的 振 动 , 问 隙 在 一 定 程 度 上 有 利 于 该 振 动 衰 减 。 在 而 展 开驱 动力 越 大 , 开 越 快 , 定 激 振 振 幅越 大 , 由展 开 进 入 稳 定 状 态所 需 总 时 间 可 更 短 。探 测 器 自旋 则 有 助 于 展 锁 但
图开 发新 型 的具有 更优 越性 能 的缓 冲器 ’ 。而 受 ” ” 运载 器空 间的 限制 , 着 陆机 构 须 具 有 可 收 拢 展 开 软
有效 , 定 的软着 陆机 构 展开 方案 提供 依据 。 稳
悬臂梁式结构具 有横 向缓 冲功 能 , 主支柱 与地 面
夹角较大 , 冲可靠性 高 , 缓 环境 适应 性 强 , 并且 更适 合 着陆质量较大的情 况¨ 。因此本文将建立一型采用 四
机 构 的展 开 , 自旋 速 度 较 高 时对 结 构 振 动 有 明 显 影 响 。该 结 果 可 为 软 着 陆 机 构 展 开 方 案 的 设 汁提 供 帮助 。 但
关 键 词 :月球 探 测 器 ;软 着 陆 机 构 ;展 开 ;动 力 学 ;仿 真 中 图分 类 号 :V 7 .;P9 . 46 3T 3 9 1 文 献 标 识 码 :A 文 章 编 号 :10 — 2 (0 00 —350 001 82 1 )20 3—7 3
是应 当考虑 的问题 。
种 展开/ 锁定 机构 的方 案 , 文献 [ 2 亦提 出 了一 1]
( .哈 尔 滨 工 业 大 学 航 天 学 院 ,哈 尔 滨 10 0 ; 哈 尔 滨 工 业 大 学 机 电 工 程 学 院 ,哈 尔 滨 10 0 ) 1 50 1 2 50 1
摘
一
要 :可 展 开 的软 着 陆 机 构 是 月 球 探 测 器 的 重 要 组 成 部 分 。 以带 间 隙 的 多 体 系统 动 力 学 理 论 为 基 础 , 对 针
取绕舱 体 纵 轴 旋 转 周 向对 称 分 布 的 配 置形 式¨ 。 该构 型与 配置 为 比较公 认 可行 的方 案 。支撑 杆组 结 构 的较 大 改 型 目前 较 少 见 。 。在 缓 冲 器 的 研 究 方
面 , 方 面是对 以蜂 窝材 料 为主 的缓 冲材料 的性能 , 一
存 在部 件 的大范 围运 动 , 又存 在振 动 , 其动 力学 特性
不 可忽 视 , 必 要对 其进 行进 一步 分 析 , 有 获得 与 软着 陆 机构 展开 过程 密切 相关 的影 响 因素 , 为设 汁快 速 ,
合理选 择 和配 置进行 进 一步研 究 ’ 另一 方面 则试 ,
腿悬臂式软 着 陆机 构 的月 球探 测 器样 机¨ 的仿 真模 。
型 , 行 机 构 展 开 过程 的 动力 学 分 析 。 进
的功 能 。在 随运 载 器 发 射 过 程 中 , 着 陆 机 构 处 于 软
收拢位 置并 锁 定 。在 轨 道 飞 行 中的某 一 时刻 , 机构 解锁 , 在驱 动力 作 用 下 展 开 至着 陆工 作 位 置 并 重新
分 。从 国内外 的研 究 现 状 看 , 冲支 撑 杆 组 的结 构 缓 形式 主要有 倒 三角 架 式 和 悬 臂 梁 式 两 大 类 ; 杆组 在 数 目及配 置上 , 主要 有 三支 撑式 和 四支撑 式 , 多采 并
的基础 上 , 一 步 对采 用 该 机 构 的一 型 四支撑 软 着 进 陆机 构 的运 动学 特 性 进 行 了 分 析 , 得 了 主支 撑 杆 获 运 动参 数 的变化 规律 。而软着 陆 机构 与其他 桁 架式 空 间展 开结构 或 机 械 臂类 似 , 展 开 及锁 定 过 程 既 其
锁定 。直 至着 陆缓 冲器 工 作 前 , 构 保 持 为 一 类桁 结
架结 构 。针 对 悬 臂 式 杆 组 形 式 , pl A o o系 列 提 供 了 l
一
软 着 陆 机 构 的 主 体 由轻 质 细 长 圆 筒 状 部 件 构 成 。在展 开过 程 的动 力 学 分 析 中 , 构部 件 的柔 性 机
第 3 卷 第 2期 I
21 0 0年 2月
宇 航 学 报
J u n lo to a tc o r a fAsrn u is
Vo . 1 31
No 2
.
Fe r a y 2 O b u r Ol
月球 探 测 器 软 着 陆机 构 展 开 动 力 学仿 真 分 析
孙 毅 胡 亚 冰 , 刘 荣 强 , ,邓 宗全