第4章 过程系统的动态模拟
化工系统工程(1)幻灯片

4、间歇过程的设计与操作优化:
80年代天津大学开始开发单产品间歇过程最优设计 和多产品间歇操作的时间表进行了研究,提出数学模型 和计算方法,用于结晶操作过程。
◆ (3)分离序列的综合:给定一进料流股,已知它的状 态,系统化的设计出能从进料中分离出所要求产品的过程, 并使总费用最小。 所需求解问题是:一是要找出最优的分离序列和每一分离 器性能;二是对每一分离器找出其最优的设计变量值。 ◆ (4)反应器网络的综合:为了制造所要求的产品,对 于给定的化学反应路径以及主副反应速率数据进行分析, 确定一个反应器最优结构和操作条件,以使在给定产率下 总生产成本为最小。
化工原理(传递过程与单元操 ) 作 化学工程学化 化学 工反 热应 力工 学程
化工分离工程 化工过程系统工程
▲系统工程的理论基础:是运筹学、系统理论及现 代控制论; 技术手段:是计算机和现代数学; 当把系统工程方法应用于各种不同科学领域,就逐 步形成具有各种不同特点的系统工程学,如化工系 统工程、环境系统工程等。
二、化工过程系统工程的任务及其主要内容:
1、化工过程系统的特点:
归纳起来就是单元过程的特点与系统结构上的特 点这两部分。
a)单元过程的特点:如在设备中发生的过程无外乎是 化学反应、质量传递、热量传递和动量传递—— “三传一反”;这样的单元过程可分为:反应过程、 传质过程、传热过程和输送过程,其相应的特点是: 反应过程是以原子为处理对象;传质过程以是分子 为处理对象;传热过程和输送过程是以热流和物流 为处理对象。明确这些特点然后建立这些单元过程 的数学模型。
第3章_过程系统模拟的基本方法

1
2
3
0 1 1 0 1 1 c11 c12 2 A 0 0 1 0 0 1 c 21 c 22 1 0 0 1 0 0 c31 c32
c13 1 0 1 c 23 1 0 0 c33 0 1 1
– 弧相邻矩阵
节点相邻矩阵
• 相邻矩阵定义为:
S [ sij ]mm
(i 1,, m;
j 1,, m)
• 式中,m为节点数目; • sij为矩阵元素,定义为
1 sij 0
从节点i到节点j有单向弧 否则
x1
u1
x2
u2 u4
x3
u3 u5 u7
x5 0 0 0 0 0 1 0
A B C D A E F G H I
3
A B 1 1 1 1 1 1
C 1 1 1
D 1 1 1
E 1 1 1 1 1 1 1
F 1 1 1
G
H
I * A A1 1 1
A B C D E F G H I
r个化学反应g个结构变量常见过程单元自由度单元名称自由度数常规指定变量混合器分流器s1流量分配比闪蒸器闪蒸温度压力泵节流阀出口压力压缩机膨胀机绝热多变效率出口压力换热器某一物流出口温度反应器反应程度绝热压降常规精馏塔操作压力平衡级侧线抽出比压力换热量过程系统自由度确定系统状态的独立变量数目系统自由度单元自由度进料自由度反应器放空产品精馏进料反应器加热器混合器进料压缩机调节阀精馏塔分割器产品产品第2节过程系统结构的计算机识别主要内容过程系统结构有向图反应器放空产品精馏进料反应器加热器混合器进料压缩机调节阀精馏塔分割器产品产品弧相邻矩阵节点相邻矩阵ij为矩阵元素定义为否则有单向弧到节点从节点可及矩阵法索引矩阵法图解法steward通路法方程系统识别himmelblau算法
第四章 可编程序控制器(PLC)原理与应用)
分类 低档机 主要功能 具有逻辑运算、定时、计数、移位及自诊断、监控 等基本功能。有些还有少量模拟量I/O功能和算术运 算等功能 应用场合 开关量控制、定时、计数控制、顺序控制等场合, 有模拟量I/O功能的低档PLC应用更广 适用于既有开关量又有模拟量的较为复杂的控制 系统,如过程控制、位置控制等
年份 第一代1969~1972 第二代1973~1975 功能特点 逻辑运算、定时、计数、中小规模集成电路CPU,磁芯 存储器 增加算术运算、数据处理功能,初步行程系列,可靠性 进一步提高 增加复杂数值运算和数据处理,远程I/O和通信功能, 采用大规模集成电路,微处理器,加强自诊断、容错技 术 高速大容量多功能,采用32位微处理器,编程语言多样 化,通信能力进一步完善,智能化功能模块齐全 取代继电器控制 能同时完成逻辑控制,模拟量控制 适应大型复杂控制系统控制需要并用于联网、通信、 监控等场合 构成分级网络控制系统,实现图像动态过程监控, 模拟网络资源共享 应用范围
输 入 继 电 器
05 06 1000~1715 07 08 09 10 11 12 13 14
15
主机
15
15
扩Ⅰ
15
15
扩Ⅱ
15
15
扩Ⅲ
15
表4-7 输出继电器区域(共128点)
名称 范围 20CH 00 01 02 03 04 21CH 00 01 02 03 04 05 06 07 (08) (09) (10) (11) (12) (13) (14) 22CH 00 01 02 03 04 05 06 07 08 09 10 11 12 13 14 继电器地址通道 23CH 00 01 02 03 04 05 06 07 (08) (09) (10) (11) (12) (13) (14) 24CH 00 01 02 03 04 05 06 07 08 09 10 11 12 13 14 25CH 00 01 02 03 04 05 06 07 (08) (09) (10) (11) (12) (13) (14) 26CH 00 01 02 03 04 05 06 07 08 09 10 11 12 13 14 27CH 00 01 02 03 04 05 06 07 (08) (09) (10) (11) (12) (13) (14)
第四章闭环伺服系统
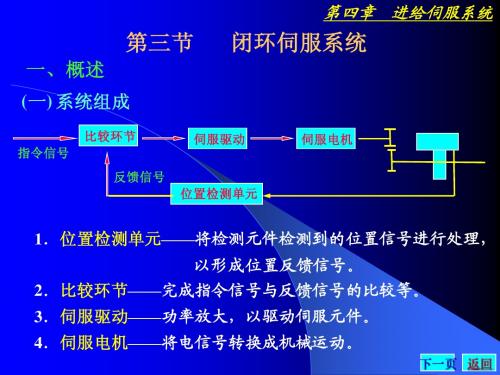
U = U 0 sin (ω t+ 2 π x /λ )
上一页 下一页 返回
第四章 进给伺服系统
脉冲编码器
脉冲编码器是一种旋转式角位移检测装置,能 将机械转角变换成电脉冲,是数空机床上使用 最光的检测装置。
光电式
脉 冲 编 码 器 的 分 类 增量式脉冲编码器 接触式
磁
磁
检测 电路
伺服系统 数字显示
尺
磁尺位置检测装置
上一页 下一页 返回
第四章 进给伺服系统
磁尺位置检测装置
表面录有相等节距(一般为0.05,0.1, 磁性标尺:
0.2,1mm)周期变化的磁信号。
磁 尺 按 基 N 本 形 状 分 为 平面实体形 磁尺 一般长度为600mm
磁尺
带 状 磁 尺 基体厚0.2mm,宽70mm
① 20mm
② 10mm
③ 0.35mm
④ 2.85mm
答: ① 设有一光栅的条纹密度是10条/mm,要利用它测 出1的位移,应采用___套光电转换装置。 ①1 答: ② ②2 ③3 ④4
上一页 下一页 返回
第四章 进给伺服系统
磁尺位置检测装置 磁尺: 是一种精度较高的位置检测装置。它 由磁性标尺、磁头、和检测电路组成。
W、ω、θ之间的关系
ω
ω
θ
BC=ABsin(θ/2) 其中
ω
光栅 节距
标尺光栅 θ
BC=ω/2 , AB=W/2 ,
指示光栅 B
因此
W=ω/sin(θ/2)
C θ /2 W /2
由于θ很小,θ单位为rad时, Sin(θ/2) ≈ θ 故 W ≈ ω/ θ
[能源化工]aspen讲义
![[能源化工]aspen讲义](https://img.taocdn.com/s3/m/36f0f7140640be1e650e52ea551810a6f424c859.png)
第一章前言第一节化工过程流程摸拟的基本概念一、化工过程流程模拟化工过程流程模拟就是借助计算机求解整个化工生产过程的数学模型,得到有关该化工过程的性能的信息。
二、稳态模拟和动态模拟化工流程模拟可分为稳态模拟和动态模拟。
稳态模拟是模拟一个稳态的化工生产操作过程。
一头是稳定地连续进料,中间经过一系列稳定连续的加工操作,最后从另一头稳定连续的提供出化工产品的工厂或装置都属于稳定操作过程。
我厂绝大多数生产装置都是稳态生产过程,例如,乙烯裂解装置、原油加工装置等。
动态模拟系统是模拟不稳定的生产过程,例如间歇操作反应釜的生产过程、装置的开停工过程都属于不稳定的生产过程。
目前,由于化工流程稳态模拟系统与动态模拟系统相比,较为成熟,且应用范围较广。
所以化工流程模拟一般是指化工流程稳态模拟。
三、化工过程流程模拟的应用范围化工过程流程模拟主要用于新装置的设计和指导现有装置操作。
化工过程流程模拟能够对化工过程进行稳态的热量和物料衡算、尺寸计算和费用计算、过程的技术经济评价及过程优化。
四、化工流程模拟系统化工流程模拟系统是能够用来实现化工流程模拟的一整套计算机程序,或软件系统。
五、通用和专用化工模拟系统从应用范围方面来看,化工流程模拟系统还可以分为专用的和通用的化工流程模拟系统。
专用化工流程模拟系统是针对特定流程专门开发的模拟系统,只能用于对该流程进行模拟的目的,不具有通用性。
例如,荷兰KTI公司的SPYRO软件便是一个只用于乙烯裂解炉的、稳态的、专用模拟软件。
通用化工流程模拟系统是指并非针对特定流程开发的、对不同流程均可适用的、带有通用性的化工流程模拟系统。
本课程所要讲的ASPEN PLUS 便是一个稳态的、通用化工流程模拟系统。
六、模拟系统的“三要素”系统模型、物性数据和解算方法是模拟的三个核心环节,缺一不可,亦称“模拟三要素”。
系统模型即描述化工系统性能的数学模型。
一个完整的系统模型,不仅必须包括组成此系统的各个单元模型,而且还包括能对系统结构给予明确表述的部分。
第四章,轨迹规划
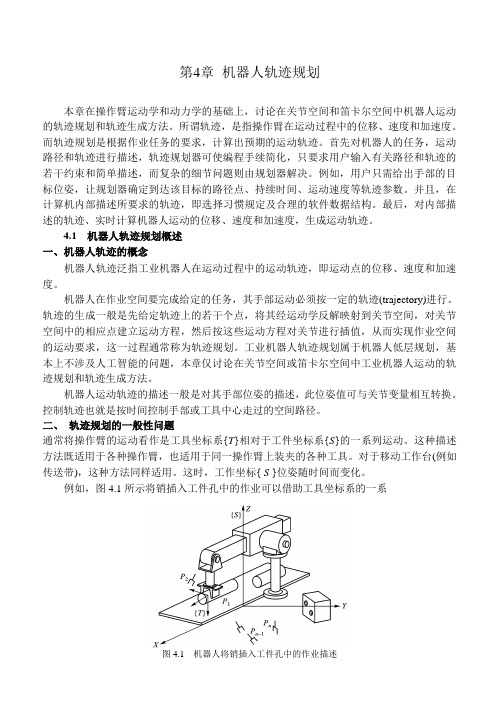
第4章机器人轨迹规划本章在操作臂运动学和动力学的基础上,讨论在关节空间和笛卡尔空间中机器人运动的轨迹规划和轨迹生成方法。
所谓轨迹,是指操作臂在运动过程中的位移、速度和加速度。
而轨迹规划是根据作业任务的要求,计算出预期的运动轨迹。
首先对机器人的任务,运动路径和轨迹进行描述,轨迹规划器可使编程手续简化,只要求用户输入有关路径和轨迹的若干约束和简单描述,而复杂的细节问题则由规划器解决。
例如,用户只需给出手部的目标位姿,让规划器确定到达该目标的路径点、持续时间、运动速度等轨迹参数。
并且,在计算机内部描述所要求的轨迹,即选择习惯规定及合理的软件数据结构。
最后,对内部描述的轨迹、实时计算机器人运动的位移、速度和加速度,生成运动轨迹。
4.1 机器人轨迹规划概述一、机器人轨迹的概念机器人轨迹泛指工业机器人在运动过程中的运动轨迹,即运动点的位移、速度和加速度。
机器人在作业空间要完成给定的任务,其手部运动必须按一定的轨迹(trajectory)进行。
轨迹的生成一般是先给定轨迹上的若干个点,将其经运动学反解映射到关节空间,对关节空间中的相应点建立运动方程,然后按这些运动方程对关节进行插值,从而实现作业空间的运动要求,这一过程通常称为轨迹规划。
工业机器人轨迹规划属于机器人低层规划,基本上不涉及人工智能的问题,本章仅讨论在关节空间或笛卡尔空间中工业机器人运动的轨迹规划和轨迹生成方法。
机器人运动轨迹的描述一般是对其手部位姿的描述,此位姿值可与关节变量相互转换。
控制轨迹也就是按时间控制手部或工具中心走过的空间路径。
二、轨迹规划的一般性问题通常将操作臂的运动看作是工具坐标系{T}相对于工件坐标系{S}的一系列运动。
这种描述方法既适用于各种操作臂,也适用于同一操作臂上装夹的各种工具。
对于移动工作台(例如传送带),这种方法同样适用。
这时,工作坐标{ S }位姿随时间而变化。
例如,图4.1所示将销插入工件孔中的作业可以借助工具坐标系的一系图4.1 机器人将销插入工件孔中的作业描述列位姿P i(i=1,2,…,n)来描述。
液压系统动态性能仿真研究

液压系统动态性能仿真研究液压系统是一种非常重要的动力传输装置,其广泛应用于工业、航空、军事、汽车等领域。
为了使液压系统具有更好的工作效率和性能表现,需要进行动态性能仿真研究。
本篇文章将介绍液压系统动态性能仿真的基本原理及其在实际应用中的优点和实践操作。
第一章:液压系统动态性能仿真的基本原理液压系统是一种能量传递系统,能够将液体作为介质传递能量,并实现机械工作的过程。
液压系统的动态性能表现是指系统在工作过程中所表现出的动态特性,包括各种参数的变化规律、动态响应性能、运动稳定性以及控制特性等等。
液压系统动态性能仿真技术是应用计算机数值模拟、数学建模和仿真技术,对液压系统的工作过程进行模拟和再现,以便在实际应用中解决液压系统的动态性能问题。
其中,数值模拟就是指通过计算机软件对液压系统的建模和仿真,以便更精确地模拟液压系统的动态特性。
液压系统动态性能仿真的基本原理包括如下两个方面:1.数值模拟:利用计算机仿真软件,结合液压系统的实际情况,建立数学模型,并进行数值模拟计算,获得系统在不同工作条件下的动态特性。
2.动态特性分析:通过仿真计算获得系统在不同工作条件下的动态特性,在此基础上进行分析其动态特性,找出问题,并提出改善或优化方案。
第二章:液压系统动态性能仿真的优点液压系统动态性能仿真技术的应用,有以下几个优点:1.提高系统设计思路:通过系统仿真,可以得出不同工况下系统参数之间的关系,以及对系统性能的影响。
这些分析结果可以引导液压系统的设计方向,并帮助设计师更快速、准确地完成系统设计。
2.优化设计方案:通过仿真得到的系统性能数据,可以对系统进行优化设计,以实现更好的性能和效益。
在模拟分析的过程中,可以建立多种方案,通过对比不同方案的性能数据,确定最优的方案。
3.缩短研发周期:液压系统动态性能仿真技术可以帮助在设计和研发阶段确定更好的系统方案,避免在试验中浪费时间和资源,从而加速研发进度,缩短研发周期。
4.降低生产成本:通过仿真分析,可以较早地找出系统设计中的问题和缺陷,从而更快速地进行改进。
全球变化第四章

第一节过去全球变化的重建
重建过去全球变化的四点意义: 第一、重建全球变化历史, 了解包括演变过 程、时空分布格局,变化的区域差异等方面 的规律。 第二、通过过去发生的全球变化现象,探讨 和认识全球变化的成因机制。 第三、利用重建的结果验证模式的可靠性或 为模式的建立提供参数。 第四、由历史演变规律推测未来环境或为预 测未来环境提供历史相似型。
第二节全球变化的观测与监测
一、空基和地面观测 二、对地观测系统与全球变化卫星 三、全球观测系统
第二节全球变化的观测与监测
一、空基和地面观测 什么是空基监测 ❖地面监测的两种类型 遥感数据的5个特点
第二节全球变化的观测与监测
二、对地观测系统与全球变化卫星 1、对地观测系统(EOS)
第二节全球变化的观测与监测
第二节全球变化的观测与监测
观测与监测的主要变量涉及六个方面: 地球系统的外部能量:太阳辐射、紫外线通量 ❖重要大气微量成分:CO2、O3、N2O、CH4、 CFCs、H2O、CO气溶胶。 天气变量:温度、地面气压、降水、风、水汽、 云。
第二节全球变化的观测与监测
观测与监测的主要变量涉及六个方面: 陆地表面性质:植被指数、土壤湿度、生物范 围、生物量、营养物质循环、土地利用变化、地 表特征、雪盖、水体、地表辐射温度。 海洋变量:海面温度、海面气压、大洋环流、 海洋叶绿素、海冰、海面高度、 CO2。 地球物理变量:重力、大地水准面、地震、地 磁、板块运动。
第一节过去全球变化的重建
三、过去全球变化信息的空间和时间属性 4、释光测年 原理:利用被测样本所接受的电离辐射剂量。
第一节过去全球变化的重建
三、过去全球变化信息的空间和时间属性 5、古地磁测年
第一节过去全球变化的重建