基于滞后校正的转子绕线机控制系统设计--大学毕业设计论文
基于滞后校正的转子绕线机控制系统设计
王政军
武汉轻工大学自动化系湖北武汉 430000
摘要: 在控制技术需求推动下,控制理论本身也取得了显著进步。从线性近似到非线性系统的研究取得了新的成就,借助微分几何的固有非线性框架来研究非线性系统的控制,已成为目前重要研究方向之一。为了实现各种复杂的控制任务首先要将被控制对象和控制装置按照一定的方式连接起来,组成一个有机整体,这就是自动控制系统
关键词: 自动控制技术、系统分析、MATLAB、校正
1设计目的、要求及原理
1.1设计目的
滞后校正网络具有低通滤波器的特性,因而当它与系统的不可变部分串联相连时,会使系统开环频率特性的中频和高频段增益降低和截止频率Wc减小,从而有可能使系统获得足够大的相位裕度,它不影响频率特性的低频段。由此可见,滞后校正在一定的条件下,也能使系统同时满足动态和静态的要求。本设计通过增加一个滞后校正装置,确定其最适合参数来改变系统性能。
1.2 设计要求
(1)系统对斜坡输入响应的稳态误差小于10%,10
K;
v
(2)系统对阶跃输入的超调量在10%左右;
(3) 按2%准则的调节时间
t不超过3s。
s
1.3设计原理
通过分析系统逐步确定其矫正系统参数,具体步骤如下:
1.根据稳态误差要求求出K值;
2.画出未校正系统的波特图,并求;
3.波特图上绘制出曲线;
4.根据稳态误差要求,求出校正系统的截止频率;
5.根据公式和 ,可求出b和t;
6.验证已校正系统的相位裕度和幅值裕度;
2设计分析与计算
2.1最小K 值的系统频域分析
已知转子绕线机控制系统的开环传递函数是:
)
01)(5()(++=
s s s K
s G ,静态速度误差系数110-≥s K v ,
1
1050/)(0
lim -≥=→=
s K s sG s v k
所以最小的K 值为: K=500 故)
01)(5(500
)(++=
s s s s G
1求相角裕度:
因为100
25500
015500)(22++=
+?+?=
ωωωωs s s A 在穿越频率处)(ωA =1, 解得Wc ≈5.96rad/s
穿越频率处的相角为:7.16107.02.090)(11-=---=--c tg tg c c ωωω? 相角裕度为:γ=180+)(c ω?=180-162.73=18.3deg
2求幅值裕度:
先求相角穿越频率:18007.02.090)(11-=---=--g g g tg tg ωωω?
9007.02.011=+--g g tg tg ωω
由三角函数关系得:66.8,107.02.0==?g g g ωωω解得:
5.022525750
)(2
2
=++=
g
g
g g A ωωωω
所以,幅值裕度为:)(02.6)(log 20dB A L g g =-=ω
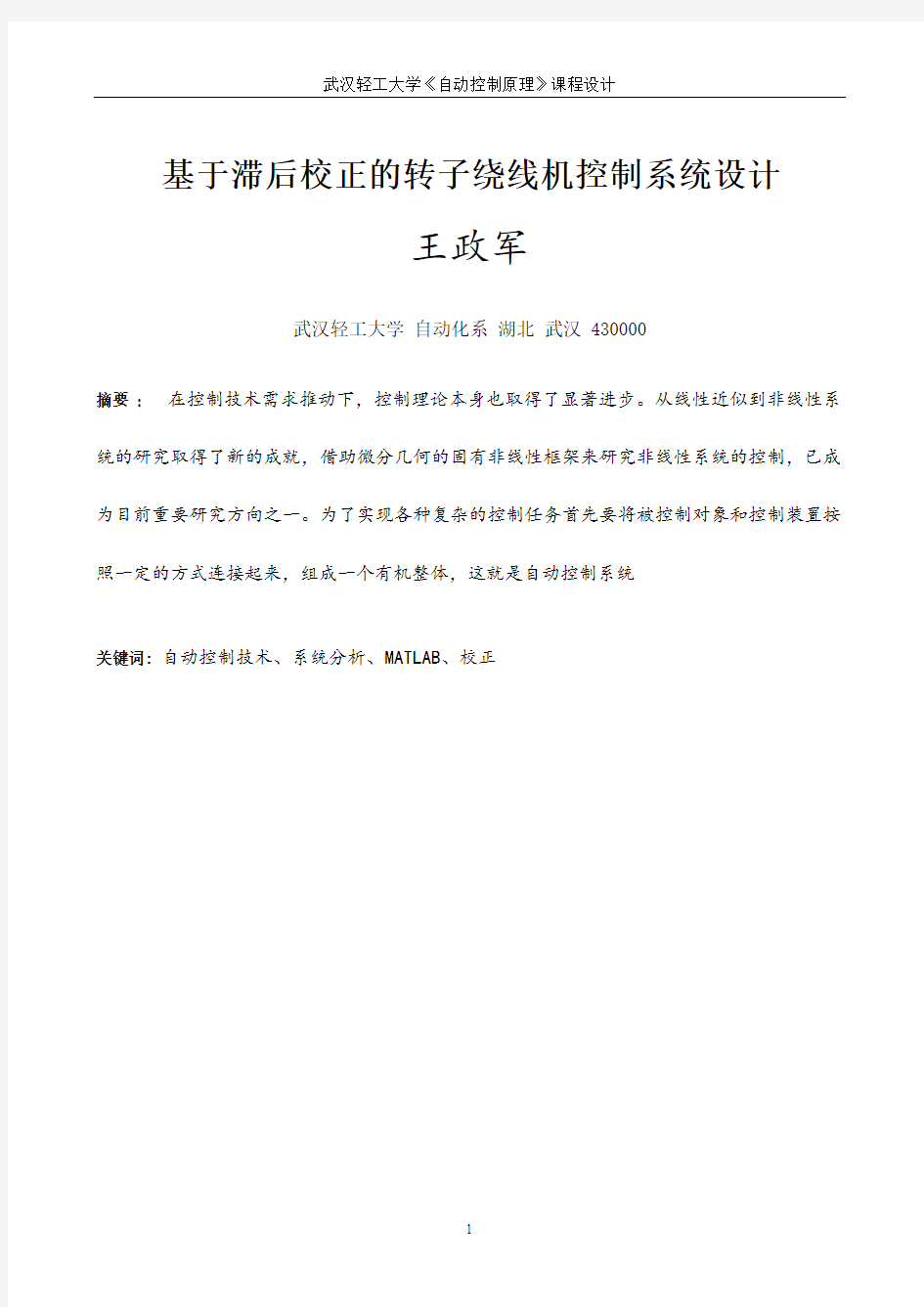
使用MATLAB 软件可直接得到系统的BODE 图和相角,幅值裕度。程序的代码如下:
n=750
d=[1,20,75,0] g1=tf(n,d)
[mag,phase,w]=bode(g1) margin(g1)
图2-1 校正前系统的BODE 图
Matlab 仿真结果为: Gm=6.02dB Pm=18.3deg (与理论计算结果相同)
2.2滞后校正函数计算
求滞后校正的网络函数可以按设计原理所讲述的方法进行求解,但过程比较麻烦,这里介绍使用matlab 进行编程求解的方法。操作简单,可快速得到结果。
由于按设计要求幅值裕度 60≥γ。根据要求令相角裕度γ=60并附加6,即取γ=66。
设滞后校正器的传递函数为: 1
1
)(++=Ts bTs s G c
校正前的开环传递函数为: )
15)(5(750
)(++=
s s s s G
用matlab 编写滞后校正的程序代码如下:
k0=750;
n1=1;d1=conv(conv([1 0],[1 5]),[1 15]); Go=tf(k0*n1,d1); [mag,phase,w]=bode(Go); Mag=20*log10(mag); Pm=60; Pm1=Pm+6; Qm=Pm1*pi/180;
b=(1-sin(Qm))/(1+sin(Qm)); Lcdb=-20*log10(b); wc=spline(Mag,w,Lcdb); T=10/(wc*b); Tz=b*T;
Gc=tf([Tz 1],[T 1])
图2-2 滞后校正求解图
得到结果为:
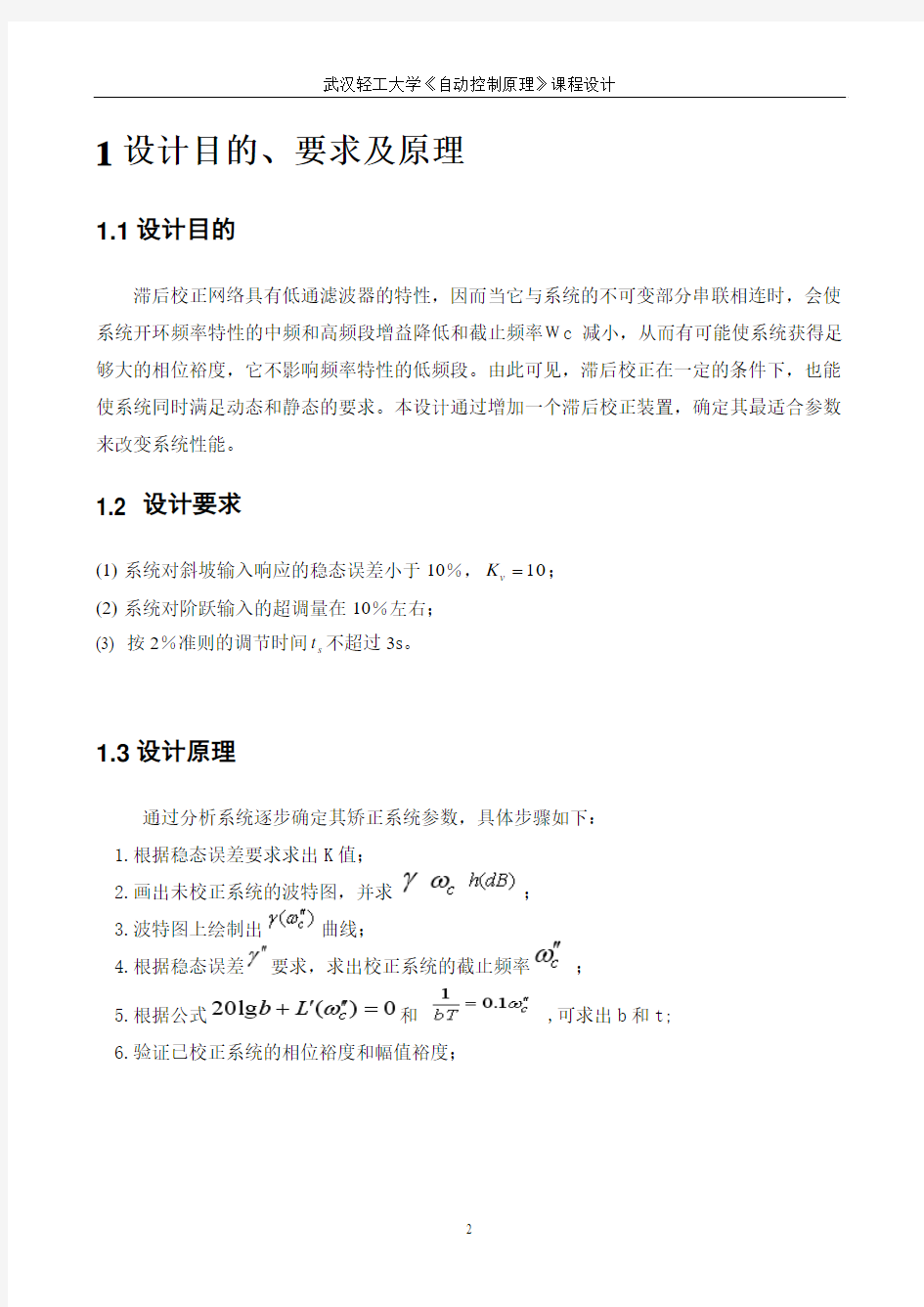
使用matlab 检验是否符合要求,程序代码为: K=750;
n1=1;d1=conv(conv([1 0],[1 5]),[1 15]); s1=tf(K*n1,d1);
n2=[22.23 1];d2=[492.1 1];s2=tf(n2,d2); sys=s1*s2;
[mag,phase,w]=bode(sys); margin(sys)
1
1.492123.22)(++=
s s s G c
图2-3 校正后系统BODE图
Matlab仿真结果为:Gm=32.8dB Pm=77.7deg (符合设计要求)
3用MATLAB 画校正前后的轨迹
3.1校正前的根轨迹
由于系统未校正前的开环传递函数为:
)
15)(5(750
)(++=
s s s s G
使用MATLAB 画根轨迹代码如下: num=750
den=conv(conv([1,0],[1,5]),[1,15]) rlocus(num,den)
title ('控制系统未校正前根轨迹图')
图3-1 校正前系统根轨迹图
3.2校正后的根轨迹
系统校正后的开环传递函数为: )
11.492)(15)(5()
123.22(750)(++++=
s s s s s s G
使用MATLAB 画根轨迹代码如下: num=750*[22.23,1]
den=conv(conv([1,15],[492.1,1]),[1,5,0]) rlocus(num,den)
title('控制系统校正后根轨迹图')
图3-2 校正后的系统根轨迹图
图3-3 右方根轨迹放大图
4用Matlab 对校正前后的系统进行仿真分析
4.1校正前系统
系统未校正前的开环传递函数为:
)15)(5(750
)(++=
s s s s G
单位负反馈闭环传递函数为:
750
7520750
)()()(2
3+++==Φs s s s R s C s
使用MATLAB 求校正前系统单位阶跃响应的性能指标代码如下: num=750
den=[1,20,75,750] t=0:0.01:20 step(num,den,t)
[y,x,t]=step(num,den,t) maxy=max(y) yss=y(length(t)) pos=100*(maxy-yss)/yss for i=1:2001 if y(i)==maxy n=i;end end
tp=(n-1)*0.01 y1=1.05*yss
y2=0.95*yss
i=2001
while i>0
i=i-1
if y(i)>=y1|y(i)<=y2;m=i;break
end
end
ts=(m-1)*0.01
title('step response')
Grid
图4-1 校正前单位阶跃响应曲线图
4.2校正后系统
系统校正后的开环传递函数为: )
11.492)(15)(5()
123.22(750)(++++=
s s s s s s G
单位负反馈闭环传递函数为750
5.167475.3692798431.492)
123.22(750)()()(2
34+++++==
Φs s s s s s R s C s 使用MATLAB 求校正后系统单位阶跃响应的性能指标代,代码如下: num=750*[22.23,1]
den=[492.1,9843,36927.5,16747.5,950] s1=tf(K*n1,d1); Lsys=tf(num,den); [y,t,x]=step(Lsys); plot(t,y)
然后使用matlab 中的LTI Viewer 工具,在MATLAB 提示符后,输入ltiview ,即可启动该图形软件。从File 的下拉菜单中选中→import 选项选择需要仿真的系统。选择窗口中的Lsys 系统,并用鼠标点击OK 。在画面中点击鼠标右键,选择“Characteristics ”选项,再选择“Peak Time ”项可得阶跃响应曲线中的峰值时间。在画面中点击鼠标右键,选择“Characteristics”选项,再选择“Settling Time”、“Rise Time”、“Steady State”选项可得阶跃响应曲线中的调节时间,上升时间,稳态值,单击各个点,图中显示相应的数据,可通过鼠标移动标注的位置。
通过点击“Edit”菜单,在弹出的下拉菜单中选择“Viewer Preferences”项,设定阶跃响应的上升时间范围为最终稳态值的0~90%,调节时间的误差带为2%,即可得到系统校正后的单位阶跃响应曲线。
图4-2 校正后的单位阶跃响应曲线
阶跃响应系能指标: 上升时间t r = 2.52s 峰值时间t p =8s 调节时间t s =50.5s 峰值幅值h (t p )=1.01 稳态值 h(∞)= 0.789 超调量 =28
心得体会
我真正有了自己去设计的感觉,只给一个不完善的系统,通过分析,充分应用matlab 来改善其性能。其中用的最多的就是频域分析和跟轨迹分析,而且通过比较,我能充分感受到
100%
)
h()
h()h(t σ%p ?∞∞-=
matlab软件的强大及便捷。课程设计是培养学生综合运用所学知识,发现,提出,分析和解决实际问题,锻炼实践能力的重要环节,是对学生实际工作能力的具体训练和考察过程。随着科学技术发展的日新日异,自动化控制已经成为当今计算机应用中空前活跃的领域,在生活中可以说是无处不在。因此作为二十一世纪的大学来说掌握单片机的开发技术是十分重要的。
通过这次课程设计,我觉得学习像自动控制这样实用的知识,不仅要掌握书本上的基本内容,还要灵活思考,善于变换,这样才能找到最优设计,达到事半功倍的效果。而这是日后最实用的,真的是受益匪浅。要面对社会的挑战,只有不断的学习、实践,再学习、再实践;才能使自己不断完善,不被社会淘汰。
总之,在这次课程设计过程中,我既学习到了原理的知识,又学到了许多书本之外宝贵的分析动手能力。与其临渊羡鱼,不如退而结网。这次自动控制设计给我的最大的印象就是如果自己有了兴趣,就动手去做,困难在你的勇气和毅力下是抬不了头的。
CNC自动绕线机控制器说明书
CNC自动绕线机控制器说明书 CNC自动绕线机控制器说明书 说明书 CNC210-S (简要版) 控制面板 Key pads 按键[ 0]~[9] 用来输入数字 [步序设定] :打开程序设置界面 [产量设定] : 设置目标产量 [起始步序] : 设置开始步序 [结束步序] : 设置结束步序 [资料选择] : 打开不同程序界面,以做设置 [排线方向] : 设置排线杆排线方向 [绕线方向] : 设置绕线的正反向 [两端停车] : 排线到端面时暂停,方便检查起绕点和幅宽设置的准确性[自动复位] : 绕完当下的步序后,排线杆自动进入下一程序的起绕点 [自动启动] : 灯亮时说明不需按启动键,程序会自动启动 [━] : 调机时,如要改变原有的参数,必须先按下此键。此时被调的参数会闪烁,按下新设定的数字再按输入键,新的参数就被设置 [清除] : 调机时,将参数清除的按键 [复制] : 调机时,复制上一步的参数 [输入] : 将参数输入并记忆 [转速] : 将显示在转速和产量之间轮换 [归零] : 按住2秒钟,产量数变为0 [自动] : 启动功能在自动和手动间转换 [煞车] : 当绕线轴停止时,刹车器即启动将绕线轴刹住 [跳段] : 跳入下一段绕线程序 [退段] : 退入上一段绕线程序 [复归] : 任何时候,按此键将终止当下的程序并回到待机状态 [停车] : 暂停绕线 [启动] : 启动绕线或在绕线中暂停绕线 数字显示 段落显示: 显示现在绕线的段落号
资料显示: 调机时,用来显示程序的内容.绕线或待机时, 显示已绕圈数或排线杆的位置 产量显示: 显示产量或转速 其他面板上的LED灯,点亮时显示该功能正在起效,否则,熄灭时则该功能不生效。 1. 设置绕线参数 1.1 MEMORY RANGE SELECTION ·设置起始步序: 待机状态下按【起始步序】【0-999】【输入】 譬如,欲设第二段为起始段。按【起始步序】【2】【输入】即可·设置结束步序 待机状态下按【结束步序】【0-999】【输入】 譬如,欲设第四段为结束段。按【结束步序】【4】【输入】即可* 注意:起始步序必须小于结束步序! 1.2 设置起绕点或幅宽时使用的“教导式” 点按【跳段】按键,可使排线杆向外微动,点按【退段】按键,可使排线杆向内微动。按住约2秒可使排线杆快动。目测准确后按【输入】即可1.3 绕线设置 ·依次按【步序设定】【输入】即进入绕线资料设置界面,面板上“起绕点” 的LED亮起。按入数字,即起绕点的位置。也可用上市的{教导式}调整。 调好后按【输入】,自动进入调幅宽的界面。幅宽的LED亮起。 以此类推,直到调完所有参数又回到“起绕点”。 按【步序设定】回到待机状态。 ·【排线方向】【绕线方向】【自动归位】和【自动启动】都必须在绕线资料设置界面设置。他们相应的LED亮起或者熄灭显示相应功能的有与无 1.4 清除所有绕线资料 待机状态下,按【步序设定】【清除】【2】【输入】所有储存的绕线资料将被清除,机器恢复到出厂设定。 * 注意:此功能只有在调乱机,出现反常现象时才考虑用。否则清除了的资料将无法恢复 2. 几种特别的绕线设置 2.1包胶纸:设“幅宽”为0 2.2起绕点为上一段的终点:设本段的起绕点为999.99 2.3单层均绕:譬如要求在100mm幅宽上用0.27的线均匀绕100圈。这时电脑
东北大学网络教育本科生毕业设计(论文)工作规范
继续教育学院 东北大学网络教育本科生毕业设计(论文)工作规范 毕业设计(论文)是培养学生知识、能力和素质的重要环节,是进行综合训练的教学阶段。对培养学生的工程意识、开拓精神、创新能力、 科学作风、综合素质都具有重要作用。为确保毕业设计(论文)的质量,制定东北大学网络教育学院毕业设计(论文)工作规范。 一、指导思想 通过毕业设计(论文)工作使大学生达到基本知识、基础理论、基本技能(三基)和运用知识能力、网络获取知识能力、实验(仿真)测试能力、计算机应用能力、外语能力(五个能力)以及文化素质、思想品德素质、业务素质(三个素质)的训练,培养学生运用所学的专业知识和技术,研究、解决本专业实际问题的初步能力。同时,毕业设计(论文)工作是大学培养阶段教学质量的综合训练和检验。 二、选题 选题是对毕业设计(论文)工作范围进行专业确定的环节。 1.毕业设计(论文)的选题要按照所学专业培养目标确定。要围绕 本专业、学科选择有一定理论与实用价值的且具有运用课程知识、能 力训练的题目。
继续教育学院2.选题要尽可能与科研、生产和实践结合。工科类专业以毕业设 计为主;文理科类专业毕业论文要理论与实践相结合,有实用价值。 3.毕业设计(论文)的题目要坚持每人一题。指导教师可将大而难的题目分解成若干个子题目,由学生独立完成选题。 4.对于与往届重复的课题,严禁将往届毕业设计(论文)借给学生参考,防止出现抄袭现象。 5.各专业可将水平较高的题目列为重点选题。属于工程设计、软 件设计、科学实验类的重点选题,必须结合科研生产实际并有实用价值。文理类的(论文)重点选题须达到本学科研究领域较先进水平。 6.网络教育学生毕业设计(论文)的选题,在学生中心平台进行,根据指导教师提出的论题方向选题,并自拟题目,由指导教师审核通过,方可进行。 7.无任务书不能进行毕业设计(论文)工作。 8.下列课题不易安排学生做毕业设计(论文): ①偏离本专业所学基本知识。 ②范围过专或过窄,达不到全面训练的。 ③毕业设计期间难以完成或不能取得阶段结果。 三、对毕业设计(论文)的基本要求
厦门大学毕业设计(论文)
厦门大学 级毕业设计(论文) (页面设置:论文版心大小为155mm×245mm,页边距:上2.6cm,下2.6cm,左2.5cm,右2cm,行间距20磅,装订线位置左,装订线1cm,) 此处为论文题目,黑体2号字 2~3~qq4~9~5~2~6~3~5 / 2`6248qq0221 以下各项居中列,黑体小四号) 年级: 159dian 2717hua 1195 学号: 姓名: 专业: 指导老师: (填写时间要用中文) 年月
院系专业 年级姓名 题目 指导教师 评语 指导教师 (签章) 评阅人 评语 评阅人 (签章) 成绩 答辩委员会主任 (签章) 年月日 毕业设计任务书 班级学生姓名学号专业 发题日期:年月日完成日期:年月日 题目
题目类型:工程设计技术专题研究理论研究软硬件产品开发 一、设计任务及要求 二、应完成的硬件或软件实验 三、应交出的设计文件及实物(包括设计论文、程序清单或磁盘、实验装置或产品 等) 四、指导教师提供的设计资料 五、要求学生搜集的技术资料(指出搜集资料的技术领域) 六、设计进度安排 第一部分(4 周)第二部分(6 周)第三部分(2 周)
评阅及答辩(1 周) 指导教师:年月日系主任审查意见: 审批人:年月日 注:设计任务书审查合格后,发到学生手上。 ××××大学××××××××学院20XX年制
摘要正文略 关键词:关键词;关键词;关键词;关键词(关键词之间分号隔开,并加一个空格)
Abstract 正文略 Keywords: keyword; keyword; keyword; keyword
转子,控制,绕线机
转子绕线机控制系统矫正设计 转子绕线机控制系统 绕线机用直流电机来缠绕铜线,它应该能快速准确地绕线,并使线圈连贯坚固。采用自动绕线机后,操作人员只需从事插入空的转子、按下启动按钮和取下绕线转子等简单操作。 下图为绕线机控制系统
控制器的设计要求 1、系统对斜坡输入响应的稳态误差小于10%,静态速度误差系数Kv=10; 2、系统对阶跃输入的超调量在10%左右; 3、 按?=2%要求的系统调节时间为3s 左右。 设计过程 由控制系统的结构图可知,系统为I 型系它 响应阶跃输入的稳态误差为零,系统对单输 入的稳态误差为: 其中: 其中Gc (s )为待设计的控制器(校正网络)。 由于原系统不能满足其静态速度误差系数Kv=10,故在滞后-超前网络中应加入一个增益放大器。将放大环节和原系统一起分析。150()10%ss v e K K ∞==≤0()lim 50 c v s G s K →=
此时校正网络的频率特性为 由于要加一个增益放大器此时解得K ≥500, 故此时K 值取500. 二)绘制未校正系统的对数幅频特性,求出待校正系统的截止频率、相角裕度及幅值裕度h (dB )。 (1/)(1/)()(1/)(1/) a b c a b j j G j ja j a ωωωωωωωωω++=++
由图像可知待校正系统的截止频率 相角裕度 幅值裕度 三)在待测系统对数幅频特性上,选择从-20dB/dec 变为- 40dB/dec 的交接频率作为校正网络超前部分的交接频率?b = 5rad/s 根据响应速度要求,选择系统的截止频率 和校正网络衰减因子1/a 。要保证已校正系统的截止频率为所选的 ,下列等式应成立: 式中 可由待 校正系统对数幅频特性的-20dB/dec,延长线 在 处的数值确定。 根据主导极点思想,可将校正后的系统等价为二阶系统 解得 ' 5.72/c rad s ω='11.4 γ=3.52h dB ≈'''''20lg ()20lg 0 c b c a L T ωω-++=1b b T ω='''''()20lg c b c L T ωω+''c ω21%100%e πξξσ--=? 4.43s n t ξω=≤0.59ξ=
绕线机控制系统改造学习指导书
项目七绕线机控制系统改造学习指导书 一、学习目标 本学习情境是一个完整的小型工程项目,通过本学习情境的学习一方面要求学生掌握绕线机控制系统改造的设计、安装、调试知识和技能;另一方面掌握绕线机改造项目实施的工作流程和要点。在该学习情境中要求每两名学生组成一个团队,通过分工协作共同完成改造任务。 1.熟悉设备改造工程的实施过程 ◆正确分析改造任务 ◆小型设备改造工程的实施流程及组织、协调 ◆改造施工过程管理与控制 2.掌握相关国家标准与规范 ◆盘、柜及二次回路结线施工及验收规范GB50171—92 ◆电气设备安全设计导则GB 4064-83 ◆国家电气设备安全技术规范GB 19517-2004 ◆机械安全机械电气设备:通用技术条件GB 5226.1-2002 ◆用电安全导则GBT 13869-92 ◆电气安全管理规程JBJ6-80 ◆电控设备第二部分装有电子器件的电控设备GB3797-1989 ◆外壳防护等级(IP代码)GB4208-93 ◆工业与民用电力装置的接地设计规范GBJ65-83 ◆电气装置安装工程施工及验收规范GBJ232-82 3.掌握触摸屏的使用方法 ◆触摸屏的特点及性能指标 ◆组态软件的使用 ◆正确与PLC连接并实现数据交换 4.掌握变频器的使用方法 ◆变频器结构、性能特点及应用 ◆线路连接 ◆常用运行参数设置方法 ◆变频器的常规检查与维护 5.掌握旋转编码器、接近开关的使用方法 ◆种类、结构特点及场合 ◆接口类型及连接方法 ◆使用要求及调整 ◆好坏判断 6.能编写、调试较复杂的PLC控制程序 ◆编写中断程序 ◆编写基于触摸屏的人机界面程序 7.学会设备技术文件的编写与整理 ◆编写改造方案 ◆绘制控制系统原理图、布置图、连接图及走线图 ◆编制施工进度表 ◆编写调试方案、调试记录 二、学生需准备的资料 1.西门子、三菱、欧姆龙等主流品牌PLC的选型样本 2.西门子、三菱、欧姆龙等主流品牌PLC的系统手册 3.主流触摸屏生产厂家触摸屏产品的选型样本、使用手册、编程软件。 4.多种品牌的编码器选型样本、使用说明书。 5.相关国家标准: ◆GB/T 5226.1-1996 工业机械电气设备第一部分:通用技术条件 ◆GB50171-92 电气装置安装工程盘、柜及二次回路结线施工验收规范 ◆JBJ6-80 电气安全管理规程 ◆GB3797-89 装有电子器件电控箱技术条件 6.绕线机相关资料 三、预习要求 1.收集主要PLC生产厂商的小型PLC主要参数(I/O点数、输入输出类型、供电电压、可扩展模块类型等),适用环境等。
东北大学毕业-论文设计要求
目录 一、内容总体要求 (3) (一)引言 (3) (二)论文的类型 (3) (三)毕业设计的选题 (3) (四)论文的写作 (4) 二、编写格式 (5) (一)封面 (5) 1、论文题目 (6) 2、作者姓名 (6) 3、指导教师姓名 (6) 4、论文封面日期 (6) (二)中文题名页 (6) 1、题目 (6) 2、姓名 (6) 3、学校与日期 (7) (三)英文题名页 (7) 1、题目 (7) 2、姓名 (7) 3、职称 (7) 4、学校与日期 (7) (四)毕业设计论文(任务书) (7) 1、毕业设计(论文)题目 (7) 2、基本内容 (7) 3、毕业设计(论文)专题部分 (8) 4、学生接受毕业设计(论文)题目日期 (8) (五)中文摘要 (8) 1、中文题目 (8) 2、摘要 (8) 3、摘要内容 (8) 4、关键词 (8) 5、关键词内容 (8) 6、关键词的选取 (8) 7、摘要内容的编写 (9) (六)英文摘要 (9) 1、题目 (9) 2、摘要 (9) 3、格式 (9) 4、关键词 (9) (七)目录 (9) 1、目录 (10) 2、索引条目 (10) 3、各节 (10) (八)正文 (10)
1、标题 (11) 2、正文 (11) 3、节 (11) 4、小节 (12) 5、正文编号 (12) 6、图 (12) 7、表 (12) 8、程序代码 (13) 9、结论 (13) (九)参考文献 (13) (十)结束语(致谢) (14) 三、其他要求 (14) 1、打印 (14) 2、页码编排 (14) 3、页眉设置 (14) 4、装订 (14)
重庆大学本科毕业设计(论文)
重庆大学本科学生毕业设计(论文) 浅析环境心理学在现代商业展示设计中的运用 学生:崔海侠 学号:20070309 指导教师:杨定强 专业:艺术设计(视觉传达方向) 重庆大学艺术学院 二O一一年六月
Graduation Design(Thesis) of Chongqing University Analyses the Environmental Psychology Application of Modern Commercial Display Design Undergraduate: Cui Haixia Supervisor:Yang Dingqiang Major:ArtDesign(visualcommunication direction) College of Arts Chongqing University June 2011
摘要 随着展示设计学科的不断完善,环境心理学在展示设计中的重要作用日益显现,并且成为现代展示设计人性化设计的指导理论之一。是为了了解人在不同展示环境下的心理和行为,科学而艺术地把握展示环境设计中各要素关系,创造符合人们心理需要的展示空间环境。环境心理学在展示设计中的应用,与以往相比,更加强调“以人为本”的设计理念,强调以人的感受作为设计的终极目标。我们研究人在环境中的行为、心理及它们之间的关系和相互作用的目的就在于:了解生活中人们的行为、心理倾向,从而使我们对人环境的关系、对怎样创造展示空间环境,都应具新的更为深刻的认识,使其及时地反馈到我们展示空间的设计中去,合理的组织空间,设计好界面、颜色和光照,创造出功能合理、舒适优美、满足人们物质和精神生活需要的展示环境。 关键词:环境心理学展示设计
转子绕线机控制系统的滞后校正设计
基于滞后校正的转子绕线机控制系统设计 王政军 武汉轻工大学自动化系湖北武汉 430000 摘要: 在控制技术需求推动下,控制理论本身也取得了显著进步。从线性近似到非线性系统的研究取得了新的成就,借助微分几何的固有非线性框架来研究非线性系统的控制,已成为目前重要研究方向之一。为了实现各种复杂的控制任务首先要将被控制对象和控制装置按照一定的方式连接起来,组成一个有机整体,这就是自动控制系统 关键词: 自动控制技术、系统分析、MATLAB、校正
1设计目的、要求及原理 1.1设计目的 滞后校正网络具有低通滤波器的特性,因而当它与系统的不可变部分串联相连时,会使系统开环频率特性的中频和高频段增益降低和截止频率Wc减小,从而有可能使系统获得足够大的相位裕度,它不影响频率特性的低频段。由此可见,滞后校正在一定的条件下,也能使系统同时满足动态和静态的要求。本设计通过增加一个滞后校正装置,确定其最适合参数来改变系统性能。 1.2 设计要求 (1)系统对斜坡输入响应的稳态误差小于10%,10 K; v (2)系统对阶跃输入的超调量在10%左右; (3) 按2%准则的调节时间 t不超过3s。 s 1.3设计原理 通过分析系统逐步确定其矫正系统参数,具体步骤如下: 1.根据稳态误差要求求出K值; 2.画出未校正系统的波特图,并求; 3.波特图上绘制出曲线; 4.根据稳态误差要求,求出校正系统的截止频率; 5.根据公式和 ,可求出b和t; 6.验证已校正系统的相位裕度和幅值裕度;
2设计分析与计算 2.1最小K 值的系统频域分析 已知转子绕线机控制系统的开环传递函数是: ) 01)(5()(++= s s s K s G ,静态速度误差系数110-≥s K v , 1 1050/)(0 lim -≥=→= s K s sG s v k 所以最小的K 值为: K=500 故) 01)(5(500 )(++= s s s s G 1求相角裕度: 因为100 25500 015500)(22++= +?+?= ωωωωs s s A 在穿越频率处)(ωA =1, 解得Wc ≈5.96rad/s 穿越频率处的相角为:7.16107.02.090)(11-=---=--c tg tg c c ωωω? 相角裕度为:γ=180+)(c ω?=180-162.73=18.3deg 2求幅值裕度: 先求相角穿越频率:18007.02.090)(11-=---=--g g g tg tg ωωω? 9007.02.011=+--g g tg tg ωω 由三角函数关系得:66.8,107.02.0==?g g g ωωω解得: 5.022525750 )(2 2 =++= g g g g A ωωωω 所以,幅值裕度为:)(02.6)(log 20dB A L g g =-=ω 使用MATLAB 软件可直接得到系统的BODE 图和相角,幅值裕度。程序的代码如下: n=750
CNC自动绕线机控制器说明书精编版
C N C自动绕线机控制器 说明书 公司内部编号:(GOOD-TMMT-MMUT-UUPTY-UUYY-DTTI-
CNC自动绕线机控制器说明书 控制器说明书 说明书 CNC210-S (简要版) 控制面板 Key pads 按键[ 0]~[9]用来输入数字 [步序设定] :打开程序设置界面 [产量设定] :设置目标产量 [起始步序] :设置开始步序 [结束步序] :设置结束步序 [资料选择] :打开不同程序界面,以做设置 [排线方向] :设置排线杆排线方向 [绕线方向] :设置绕线的正反向 [两端停车] :排线到端面时暂停,方便检查起绕点和幅宽设置的准确性 [自动复位] :绕完当下的步序后,排线杆自动进入下一程序的起绕点 [自动启动] :灯亮时说明不需按启动键,程序会自动启动 [━] : 调机时,如要改变原有的参数,必须先按下此键。此时被调的参数会闪烁,按下新设定的数字再按输入键,新的参数就被设置 [清除] :调机时,将参数清除的按键 [复制] :调机时,复制上一步的参数
[输入] :将参数输入并记忆 [转速] :将显示在转速和产量之间轮换 [归零] :按住2秒钟,产量数变为0 [自动] :启动功能在自动和手动间转换 [煞车] :当绕线轴停止时,刹车器即启动将绕线轴刹住 [跳段] :跳入下一段绕线程序 [退段] :退入上一段绕线程序 [复归] :任何时候,按此键将终止当下的程序并回到待机状态 [停车] :暂停绕线 [启动] :启动绕线或在绕线中暂停绕线 数字显示 段落显示:显示现在绕线的段落号 资料显示:调机时,用来显示程序的内容.绕线或待机时,显示已绕圈数或排线杆的位置 产量显示:显示产量或转速 其他面板上的LED灯,点亮时显示该功能正在起效,否则,熄灭时则该功能不生效。 1.设置绕线参数 MEMORYRANGE SELECTION ·设置起始步序: 待机状态下按【起始步序】【0-999】【输入】 譬如,欲设第二段为起始段。按【起始步序】【2】【输入】即可
东北大学毕业设计(论文)-模板
设计年产炼钢生铁480万吨、铸造生铁40万吨 的炼铁车间设计 作者姓名:XXX 指导教师:XXX 教授/副教授/讲师 单位名称:东北大学冶金学院 专业名称:冶金工程 东北大学 2016年6月
Ironmaking Plant Designing With an Annual Output of 4.8 Million Tons of Pig Iron for Steelmaking and 0.4 Million Tons Pig Iron for Casting by XXX Supervisor: Professor XXX Northeastern University June 2016
毕业设计(论文)任务书
摘要 我国钢铁产量已连续多年位居世界第一,而高炉炼铁又是钢铁联合企业中极其重要的一环。为了响应现代化工业的要求,高炉炼铁设计必须积极推行可持续发展和循环经济理念,提高环境保护和资源综合利用水平,那么我们的设计就必须要全面贯彻“高效、优质、低耗、长寿、环保”的炼铁方针。因此,本设计在延续经典传统工艺方法的同时,积极采用国内先进的生产工艺和设备以达到高炉炼铁的新要求。 本设计主要的任务是:设计一座年产480万吨制钢生铁和40万吨铸造生铁的炼铁厂。根据国内外大型高炉先进生产技术指标,确定的主要技术经济指标:利用系数2.3,焦比315kg,煤比180kg,热风温度1200℃,富氧3%。炼铁厂设计主体包括两座33003的高炉,以及每座高炉对应的四座新日铁外燃式热风炉,一座重力除尘器及其它附属设备。在设计上,采用国内外先进技术,如高风温,喷吹煤粉,干法除尘,环形出铁场等。另外,在炉前设置了除烟罩和其他除尘设备,在噪音大的地方安装消音器,以改善炼铁厂的环境,减少对环境的污染。本设计预计可实现高产、优质、低耗、长寿和环保的综合目标。 本说明书分为两个部分:第一部分,高炉车间设计;第二部分,翻译。 第一部分分为10章,内容包括高炉冶炼综合计算、高炉本体设计、高炉车间原料系统、炉顶装料设备、送风系统、高炉煤气系统、渣铁处理系统、高炉喷吹燃料系统、高炉平面布置、环境保护。 关键词要求3-6个。摘要页要求中、英文两种,英文是对中文的翻译,中文摘要一般不少于400字。 (打印方式:摘要前三页(无页码)均采用单页输出,摘要页之后(有页码)采用正反面输出) …… …… ……
(整理)成都大学毕业设计(论文)撰写规范
毕业设计(论文)撰写规范 学士学位论文(设计说明书)是学生在教师的指导下经过调查研究、科学实验或工程设计,对所取得成果的科学表述,是学生毕业及学位资格认定的重要依据。其撰写在参照国家、各专业部门制定的有关标准及语法规范的同时,应遵照如下规范: 1.论文结构及写作要求 论文(设计说明书)应包括题目、中文摘要与关键词、英文题目、英文摘要与关键词、目录、正文、致谢、参考文献和附录等部分。 1.1 题目 题目应该简短、明确、有概括性。论文题目一般中文题目不超过25个字,外文题目不超过15个实词,不使用标点符号,中外文题名应一致。标题中尽量不用英文缩写词,必须采用时,应使用本行业通用缩写词。 1.2 摘要与关键词 1.2.1 摘要 摘要是对论文(设计说明书)内容不加注释和评论的简短陈述,要求扼要说明研究工作的目的、主要材料和方法、研究结果、结论、科学意义或应用价值等,是一篇具有独立性和完整性的短文。摘要中不宜使用公式、图表以及非公知公用的符号和术语,不标注引用文献编号。中文摘要一般为300字左右,外文摘要为250个实词左右,外文摘要应与中文摘要内容一致。 1.2.2 关键词
关键词是供检索用的主题词条,应采用能覆盖论文主要内容的通用技术词条(参照相应的技术术语标准),一般列3~5个,按词条的外延层次从大到小排列,应在摘要中出现。 1.3 目录 目录独立成页,包括论文中全部章、节的标题及页码。目录中的标题应与正文中的标题一致,附录也应依次列入目录。 1.4 论文正文 论文正文包括绪论、论文主体及结论等部分。 1.4.1 绪论 绪论应综合评述前人工作,说明论文工作的选题目的、背景和意义、国内外文献综述以及论文所要研究的主要内容。对所研究问题的认识,以及提出问题。 1.4.2 论文主体 论文主体是论文的主要部分,应该结构合理,层次清楚,重点突出,文字简练、通顺。 1.4.3 结论(结果与分析) 结论是对整个论文主要成果的归纳,应突出论文(设计)的创新点,以简练的文字对论文的主要工作进行评价。若不可能导出应有的结论,则进行必要的讨论。可以在结论或讨论中提出建议、研究设想及尚待解决的问题等等。 1.5 致谢 向给予指导、合作、支持及协助完成研究工作的单位、组织或个人致谢,内容应简洁明了、实事求是,避免俗套。
转子绕线机控制系统的滞后校正设计
1.设计目的、要求及原理 1.1 设计目的 通过增加一个滞后校正装置,确定其最适合参数来改变系统性能。 1.2 设计要求 要求系统的静态速度误差系数 1 12- ≥s K v,相位裕度 60 ≥ γ。 1.3 设计原理 通过分析系统逐步确定其矫正系统参数,具体步骤如下: 1.根据稳态误差要求求出K值; 2.画出未校正系统的波特图,并求; 3.波特图上绘制出曲线; 4.根据稳态误差要求,求出校正系统的截止频率; 5.根据公式和,可求出b和t; 6.验证已校正系统的相位裕度和幅值裕度;
2.分析与计算 2.1最小K 值的系统频域分析 已知转子绕线机控制系统的开环传递函数是: ) 10)(5()(++= s s s K s G (静态误差系数112-≥s K v ) 所以最小的K 值为: K=600 故: ) 10)(5(600 )(++= s s s s G ① 求相位裕度: 因为 2210025600 |10||5|||600)(ω ωωω++=+?+?= s s s A 在穿越频率处)(ωA =1, 解得 =6.31rad/s 穿越频率处的相角为:82.1731.02.090)(11-=---=--c c c tg tg ωωω? 相角裕度为: 18.682.173180)(180=-=+=c ω?γdeg ② 求幅值裕度: 因为 1801.02.090)(11-=---=--g g g tg tg ωωω? 8.010025600 )(2 2 =++= g g g g A ωωωω 所以,幅值裕度为: )(94.1)(log 20dB A L g g =-=ω 使用MATLAB 软件可直接得到系统的BODE 图和相角,幅值裕度。程序的代码如下: n=600 d=[1,15,50,0] g1=tf(n,d) [mag,phase,w]=bode(g1) margin(g1) 10 1250 /)(lim -→≥==s K s sG K s v
清华大学 计算机科学与技术专业 本科毕业设计
数据结构分析及算法研究 一.数据结构概述 当今时代是一个以信息技术(Information Technology,简称IT)为代表的知识经济时代,计算机技术和信息科技的发展更是日新月异,从各个方面影响和改变着我们的生活,而其中的计算机网络技术的发展更为迅速,已经渗透到了我们生活的各个方面,人们已经离不开计算机网络,并且随着因特网的迅速普及,给我们的学习与生活条件带来更大的方便,我们与外部世界的联系将更加的紧密和快
速。 随着人们对于信息资源共享以及信息交流的迫切需求,促使网络技术的产生和快速发展,计算机网络的产生和使用为人类信息文明的发展带来了革命性的变化。随着计算机网络管理功能的强化,计算机硬件技术和软件技术都与网络技术融合到一起,近几年来应用程序的开发更发展到以WEB门户网站为界面,以与后台网络分布式数据库和实时交互操作的程序库,共同组成网络环境下的三层架构模式,这成了计算机应用程序开发模式的主流趋势。 本次石景山卫生局网络建设项目是以局域网为依托,架构办公自动化、信息传播、疾病控制和有关智能化系统等运行平台,为用户提供先进的办公、数据共享、信息传播和学术交流手段,实现各系统之间的信息交流和信息资源共享,实现内部局域网与Internet以及区卫生所专网的连接。
第一章计算机局域网概述 系统的理解网络理论对于掌握网络技术是十分必要的,本论文中仅对于相关技术作简单的介绍,便于读者阅读。 一.计算机局域网 “网络就是计算机”,计算机网络已经在企业、事业、学校、政府机关等地方成为不可缺少的工具。对网络的进一步定义是: “至少有两个具有共享需求的个体;至少有一种方法或通路使其个体互连;至少有一种规则使两个或两个以上个体相互传信。”个体指计算机硬件和软件、方法或通路指连接与传输媒介、规则指网络通信协议。网络在不同的阶段有不同的含义,定义也会被修改,但几十年的变迁有一点始终不改,那就是“资源”的共享,包括软件资源、硬件资源、数据和服务资源的共享,它是组网的原始动力。 1.计算机网络的分类 网络按照传输距离可以分为一下3种: 1)局域网(Local Area Networks,简称LAN)。 局域网的传输距离较短一般从几米到几公里,往往用于一个单位,比如一个公司、一个政府部门等。局域网的优点是传输速率高,往往可以达到百兆或千兆,局域网的另一个优点是传输信号质量高,误码率低,传输时延小。 2)广域网(Wide Area Networks,简称WAN)。 广域网也成为远程网,传输距离为几百公里甚至更远,一般跨城市甚至国家。广域网往往会用多种通信介质,比如光纤、微波中继、卫星通信与电力载波等。如何在广域网上保证网络访问的安全,是目前网络技术的关键和核心技术领域之一。 3)城域网(Metropolitan Area Network,简称MAN)。 城域网介于LAN和WAN之间,传输距离由几公里到十几公里,“城域网”可以理解为一个城市范围内的网络,事实上目前的城域网通常以高速环网为核心架构一个城市的主干高速通信网。
绕线机运动控制器
绕线机标准TB04-2371.jtd-1 绕线机标准套件 绕线机运动控制器 拥有几十种绕线机的控制实例。标准的绕线指令,排列绕线及多方向指数都能立即投入使用。除此之外,还可对应初始角/返回角的角控制,反向绕和同向绕,以及可变横行绕线等特殊控制要求。 ■优点 ◆多种绕线对应主軸旋绕?搅拌绕?喷嘴绕多种方式◆内制化 对应厂家内部研发机◆高精度精度可与高级NC媲美◆独特性 追求己独特的绕线手法(利用Excel)◆保密性 独自技术的保密性好■绕线指令REELX[横行幅]P[间距]RN[绕数]S[主轴速度] RE[终端处理];排列绕线用1行指令即可运行。 通过主抽的加减速控制,实现横行绕线同步。精细线径时可实现10nm单位微调。 (1P=1μm时)间隙:可按0.01脉冲单位设定 终端:可选择自然停止/开始/结束 ■使用EXCEL运行软件(含源程序)绕线设定绕线动作参数,将参数转换成技术语言即可运行。 可简单设定喷嘴绕线及特殊的运行方式。 ■精密NC绕线技术微细插补精密插补轨迹及准确的连续性 多维控制多维横行及喷嘴绕线控制同步性主轴及横行的同步 精细微细准确的返回 ■精度解析同期精度を定量解析?検証する仕組み ■精度分析例(蓝:自然停止粉:开始黄:结束)REELX350P50N30S300E0;纵轴:横行位置横轴:主轴绕数■运行程序(编程语言?G语言)所有的动作可简单指定。 不仅是绕线操作(绕?切?指数? 跳转),还可指定焊着?熔接?搬送? 成型等操作。■运行程序里例◆绕(螺旋)CIRRX0Y0I100J0Z100F1000◆跳转移动?指数PTPX1000Y1000 ■绕线指令的自定义可根据您的需求,根据几件机械?构造?夹具设计最佳绕线模式。 ■绕线运动控制器规格 ◆SLM4000绕线规格单板独立单机工作 4轴脉冲列输入32输出32 RS232/USB◆PLMC40绕线规格PLC动作4轴脉冲列输入16输出16RS232可使用通用PLC扩展(梯形?IO?模拟等)◆PLMC-MⅡEX绕线规格 MECHATROLINK-Ⅱ标准4/9/16轴最大30轴 可使用通用PLC扩展(梯形?IO?模拟等)◆多軸运动功率放大器绕线规格多轴伺服功放一体型最大7轴输入42输出42可节省配线节省成本 ■ 主轴和横行
转子绕线机控制器的设计
课程设计 题 目: 转子绕线机控制器的设计 初始条件:已知转子绕线机控制系统的开环传递函数是 ) 10)(5()(++= s s s K s G 要求系统在单位斜坡输入作用下的稳态误差为e 0.1ss ≤,相角裕度 50≥γ。
要求完成的主要任务:(包括课程设计工作量及其技术要求,以及说明书撰写等具体要求) (1)作出满足初始条件的最小K值的未校正系统伯德图,计算系统的幅值裕度和相位裕度。 (2)在系统前向通路中插入一相位滞后校正装置,确定校正网络的传递函数。并用MATLAB 画出已校正系统的伯德图,计算已校正系统的幅值裕量和相位裕量。 (3)画出未校正和已校正系统的根轨迹。 (4)用Matlab画出已校正系统的单位阶跃响应曲线、求出超调量、峰值时间、调节时间及稳态误差。 (5)课程设计说明书中要求写清楚计算分析的过程,列出MATLAB程序和MATLAB输出。说明书的格式按照教务处标准书写。 时间安排: 指导教师签名:年月日 系主任(或责任教师)签名:年月日 目录 摘要 (1) 1.设计目的与要求 (2) 1.1设计的目的 (2) 1.2设计的要求 (2) 2.设计方案与原理 (3) 2.2设计的原理 (3) 3.设计分析与计算 (4) 3.1校正前最小K值的系统频域分析 (4)
3.2滞后校正 (4) 3.2.1滞后校正函数的确定 (4) 3.2.2校正后的系统频域分析 (5) 4.系统校正前后的根轨迹 (6) 4.1校正前的根轨迹 (6) 4.2校正后的根轨迹 (7) 5.已校正系统的单位阶跃响应及仿真分析 (7) 6.心得体会.............................................................. 错误!未定义书签。参考文献.................................................................. 错误!未定义书签。本科生课程设计成绩评定表.................................. 错误!未定义书签。
自动绕线机常功能和调试方法
自动绕线机常见功能和调试方法 时间:2012-3-10 4:10:39 很多做绕线机工程技术这一块的朋友对绕线机不懂 调试,主要是对产品不熟,或没有经过培训吧,当然如果你知道的话,那就简了。 自动绕线机常见功能和调试方法: 绕线机不单有精密的机械部件,还配置有强大的电气控制系统,它集合了电气控制、传感技术、机械传动、气动装置等部件,其调试方法相比其他电气加工设备要复杂和精细的多,笔者从事自动绕线设备加工行业多年积累了一点绕线设备的调试方法,本文就该类设备的调试作一个简单介绍,希望对广大的绕线设备用户能有所帮助。 以下调试方法可应用于常见的带骨架线圈的缠绕加工工艺,主要讲解起绕位置、漆包线规格、绕线宽度三个重要的绕线参数。 一、起绕位置如何设定 什么是起绕位置?简单的说就是在骨架上开始绕线的起点,这个位置与线圈的出头及线圈类型有紧密的联
系,通常可以通过设备控制系统自带的测量功能来测的相关起绕位置的具体数值;操作人员也可以采用人工方式测量,以固定点作为参考点使用尺具实际测量,设定该点时注意线圈的缠绕方向。 二、漆包线规格的设定 我们常见的漆包线有不同的线径,漆包线规格设定是否正确直接会影响到排线的效果,使用不同材质的漆包线需要加不同的线径修正值,铜线不易被拉细,其修正值加0.02左右,铝线在经过绕线设备的张力及过线装置后容易被拉伸,其修正值幅度较大0.02-0.2之间都是允许的。 三、绕线宽度的设定 绕线宽度的理解就是从开始绕线的位置到绕线结束位置之间的距离,通常该值直接反映骨架需要绕线的长度,设定时需要考虑所使用骨架的微小变形量会绕线宽度的影响,应采用综合测量的方法取最小值作为绕线宽度。 随着科技的高速发展,现代自动绕线机由于集成了电气控制、机械传动、光电检测等诸多技术,所以其设置调试的难度也大大增加了,许多客户在购买
东北大学网络教育本科生毕业设计(论文)工作规范
继续教育学院东北大学网络教育本科生毕业设计(论文)工作规范 毕业设计(论文)是培养学生知识、能力和素质的重要环节,是进行综合训练的教学阶段。对培养学生的工程意识、开拓精神、创新能力、科学作风、综合素质都具有重要作用。为确保毕业设计(论文)的质量,制定东北大学网络教育学院毕业设计(论文)工作规范。 一、指导思想 通过毕业设计(论文)工作使大学生达到基本知识、基础理论、基本技能(三基)和运用知识能力、网络获取知识能力、实验(仿真)测试能力、计算机应用能力、外语能力(五个能力)以及文化素质、思想品德素质、业务素质(三个素质)的训练,培养学生运用所学的专业知识和技术,研究、解决本专业实际问题的初步能力。同时,毕业设计(论文)工作是大学培养阶段教学质量的综合训练和检验。 二、选题 选题是对毕业设计(论文)工作范围进行专业确定的环节。 1.毕业设计(论文)的选题要按照所学专业培养目标确定。要围绕本专业、学科选择有一定理论与实用价值的且具有运用课程知识、能力训练的题目。 2.选题要尽可能与科研、生产和实践结合。工科类专业以毕业设
继续教育学院计为主;文理科类专业毕业论文要理论与实践相结合,有实用价值。 3.毕业设计(论文)的题目要坚持每人一题。指导教师可将大而难的题目分解成若干个子题目,由学生独立完成选题。 4.对于与往届重复的课题,严禁将往届毕业设计(论文)借给学生参考,防止出现抄袭现象。 5.各专业可将水平较高的题目列为重点选题。属于工程设计、软件设计、科学实验类的重点选题,必须结合科研生产实际并有实用价值。文理类的(论文)重点选题须达到本学科研究领域较先进水平。 6.网络教育学生毕业设计(论文)的选题,在学生中心平台进行,根据指导教师提出的论题方向选题,并自拟题目,由指导教师审核通过,方可进行。 7.无任务书不能进行毕业设计(论文)工作。 8.下列课题不易安排学生做毕业设计(论文): ①偏离本专业所学基本知识。 ②范围过专或过窄,达不到全面训练的。 ③毕业设计期间难以完成或不能取得阶段结果。 三、对毕业设计(论文)的基本要求 1.要求学生能够在毕业设计(论文)中应用基本知识、基本理论和
大学本科毕业论文、毕业设计
山东大学本科毕业论文、毕业设计 工作管理条例(试行) 毕业论文、毕业设计教学过程是高等学校实现本科培养目标要求的重要培养阶段。毕业论文、毕业设计是在大学期间学生毕业前的最后学习阶段,是学习深化和提高的重要过程;是学生运用已学过知识的一次全面总结和综合训练;是学生素质与能力培养效果的全面检验;是对学生的毕业及学位资格进行认证的重要依据;是衡量教育质量和办学效益的重要评价内容。因此,搞好比业论文、毕业设计工作,对全面提高教学质量具有重要意义。为了加强对毕业论文、毕业设计工作的规范化管理,根据教育部有关规定和本科专业培养计划的要求,结合我校实际情况,特制定本条例。 本条例适用于全日制本科生毕业论文、毕业设计,全日制专科生毕业论文、毕业设计亦可参照执行。 一、目的和要求 (一)目的 毕业论文是高等学校的应届毕业生在毕业前所撰写的学位论文,表明作者在科学研究工作中取得的新成果和新见解,反映作者具有的科研能力和学识水平。毕业设计是高等学校技术科学与工程技术专业的应届毕业生在毕业前接受课题任务,进行实践的过程及取得的成果。毕业论文、毕业设计的目的是培养学生综合运用所学的基础理论、专业知识和基本技能,提高分析和解决实际问题的能力,使学生在知识、能力素质方面得到综合训练、转化和提高。 (二)要求 各院(部)要加强对毕业论文、毕业设计工作的领导。在毕业论文、毕业设计工作中,要认真贯穿“三个结合”的原则:理论与实践相结合,教学与科研、生产相结合,教育与国民经济建设相结合。通过三个结合,实现毕业论文、毕业设计的教学、教育功能和社会功能。按照高等学校人才培养目标和毕业论文、毕业设计工作教学目标的基本要求,重视学生多学科的理论、知识和技能等综合运用能力的实际训练,加强学生创新意识和创造能力的培养,不断提高毕业论文、毕业设计质量、人才培养质量及教学管理工作水平。 搞好毕业论文、毕业设计工作的关键在于指导教师。各院(部)要采取有效措施,加强指导教师队伍的建设,按要求选配好指导教师,并充分发挥指导教师的作用。要加强对学生毕业论文、毕业设计的选题、指导、答辩、成绩评定等各个环节的质量检查,切实保证毕业论文、毕业设计的质量。 除医学类部分专业(如临床医学、口腔医学、护理学等专业)外,其余专业都要进行毕业论文、毕业设计工作。 二、进程安排
自动转子绕线机常见问题修复
绕线机常见故障分析及解决 1.盐浴不良: a.铜线不良:从线桶中抽出部分铜线(拉伸几下)放入盐水中可判断。 b.张力不良(过大):放入盐水中的转子线包不规则冒泡,数值上升较慢。 (过小):线在绕线过程中容易挂到钢片上且线包太松。 解决:所经过绕线机张力系统穿过的铜线必须通过张力对照表用弹簧称核对后方可绕线。 c.羊毛毡结碳.各过线轮损伤.各过线小轴承损坏:放入盐水中的转子线包不规则冒泡, ,数值上升较快。 解决:更换损坏羊毛毡.过线轮小轴承 d.绕线模具损伤(导线模):放入盐水中的转子线包规则冒泡,冒泡位置在铁芯上部.下部或中部(每一槽在同一位置).数值上升快。 (钩线套):放入盐水中的转子线在颈部冒泡(应可看到损伤部位)。 解决:检查模具.确定位置.打磨抛光。 e.设备调试不良造成绕线过程中分度变化(以至铜线下线刮伤):绕线模具于钩线套中心高没调好,绕线模具平衡没调好。钩线套位置没调好(一边高一边低),平行气缸动作不协调(一边快一边慢),转位轴中轴承不良,夹紧机构中平面轴承不良。 放入盐水中的转子线包规则冒泡(几槽在同一位置,特别最后俩组线圈)。 其它:飞叉轴承坏,飞叉主轴轴承档磨损,飞叉皮带轮轴承档磨损造成模具中心调不好。 解决:检查调试以上问题点,检查更换各轴承。 注:换铜线时要检查线捅周边有无毛边打磨。 f.穿线方法不正确:在电控磁粉张力器的过线轮上或附助过线轮上,铜线绕的圈数过多,磁 粉张力器通常为2-3圈。附助为1圈。(铜线在阻力与拉力作用下会相互挤压, 漆膜会损伤)。铜线穿在过线轮防护杆上,主轴进线口处过线轮位置不对( 线直接与过线轮防护杆磨擦),主轴内尼龙管脱落,主轴至飞叉线没经过线轮。 解决:检查以上问题点,调整。 g.绕线模具不良:绕线模具长期打磨抛光磨损严重,护住钢片很少以至下线时铜线刮到钢片。绕线模具侧护板与中间护板间隙过小(针对0。45以上线)挤伤,中间护板位置没调好,下线刮到钢片,盐浴不良或断线。 解决:检查模具,加工处理,调试仔细。