一种新型基于插值的高光谱图像亚像元定位算法
基于互相关的图像匹配亚像素定位
第35卷第5期 光电工程V ol.35, No.5 2008年5月Opto-Electronic Engineering May, 2008文章编号:1003-501X(2008)05-0108-06基于互相关的图像匹配亚像素定位雷鸣,张广军( 北京航空航天大学精密光机电一体化技术教育部重点实验室,北京 100083 ) 摘要:本文提出了一种新颖的基于抛物线拟合原理的亚像素求取算法。
为了简单快速的获得亚像素定位精度,本文根据相关峰所呈现出的特性,用抛物线拟合经相关峰顶点切开的纵切面轮廓。
沿不同的方向纵切,就可获得不同方向上的拟合抛物线,而根据每一条拟合抛物线可获得其对应顶点。
最后根据所获得的点,进一步求取到各点距离之和的最小值点,其对应位置即为所求。
从而实现了以点来描述线(每个点代表一条抛物线),以线(所有的拟合抛物线)来描述面的思想,以便于更真实详细的描述相关峰顶点附近峰面所呈现出来的特性。
实验证明,该算法具有较高的亚像素提取精度,能达到0.01级别的像素精度。
关键词:抛物线拟合;归一化积相关;亚像素;相关峰;费马点中图分类号:TN911.73 文献标志码:AImage Orientation Algorithm with Subpixel AccuracyBased on Correlative Matching MethodLEI Ming,ZHANG Guang-jun( Key Laboratory of Precision Opto-mechatronics Techonology, Ministry of Education, BeijingUniversity of Aeronautics and Astronatics, Beijing 100083, China )Abstract: A new sub-pixel algorithm based on the principle of the parabola fitting is proposed. According to the condition of the correlation peak, the outline of the longitudinal section along the climax of the correlation peak is fitted by parabola. The longitudinal section is executed along different direction to acquire different parabola, and then the climax of parabola can be gained from every parabola. The optimum position is the point, where the sum of distance is the least from it to all other points. Thus, it is realized that the line of parabola is described by point and the surface of correlation peak is described by line, which can show more truly the condition of the correlation peak. The experimental results show that the algorithm maintains a high precision of the subpixel extraction.Key words: parabola fitting; normalized product correlation; sub-pixel; correlation peak; Fermat point1 引 言图像特征的精确定位在许多领域有着极为重要的应用[1]。
利用协同表示与神经网络的高光谱图像亚像元定位

利用协同表示与神经网络的高光谱图像亚像元定位薛晓琴; 岳亚伟; 夏磊; 李丽; 贺雄伟【期刊名称】《《遥感信息》》【年(卷),期】2019(034)005【总页数】7页(P69-75)【关键词】分类; 协同表示; 神经网络; 小样本; 高光谱图像; 亚像元定位【作者】薛晓琴; 岳亚伟; 夏磊; 李丽; 贺雄伟【作者单位】山西农业大学软件学院山西太谷030801【正文语种】中文【中图分类】TP7510 引言高光谱遥感图像[1]中普遍存在着混合像元,研究者认为混合像元中存在的地物类别、各地物类别所占的比例信息以及各地物类别的具体空间位置具有重要意义[2]。
混合像元中存在的各地物类别称为端元,寻找端元是对混合像元的定性分析;混合像元中端元所占的百分比称为丰度,求解丰度是对混合像元的定量分析;混合像元中不同地物类别的空间分布是亚像元定位的结果,亚像元定位是对混合像元的定位分析。
亚像元定位的思想最早由Atkinson在1997年提出[3]。
亚像元定位自提出之后引发了国内外学者的高度关注以及深入的科学研究。
亚像元定位技术根据空间分辨率提高的尺度因子将像元划分成多个小的亚像元,并为每个小的亚像元分配唯一的类别标签。
现有的亚像元定位模型主要有三大类:1)基于空间引力的亚像元定位,如Mertens提出的亚像元空间引力模型(subpixel/pixel spatial attraction model,SPSAM)[4]、基于空间引力模型和自适应端元选取的亚像元定位(attraction based subpixel mapping,ASPM)[5]、基于空间引力和空间辅助信息的亚像元定位(attraction based contextual subpixel mapping,ACSPM)[5];2)基于目标优化的的亚像元定位,如基于最大后验概率(maximum a posteriori,MAP)的亚像元定位[6]、基于MAP的引入多个亚像元移位图像的亚像元定位[7]、基于马尔可夫随机场(markov random field,MRF)的亚像元定位[8]、基于MRF和多个亚像元移位图像的亚像元定位[9]、基于模拟退火算法的亚像元定位模型[10]、具有稀疏约束和全变分最小约束的亚像元定位[11];3)基于训练方式的亚像元定位,如基于BPNN(backpropagation neural network)的亚像元定位[12]、基于HNN(Hopfield neural network)的亚像元定位[13]、以全色图像作为附加信息的基于HNN的亚像元定位[14]、基于SVM的亚像元定位[15]。
一种基于模板匹配的线性特征混合像元的亚像元定位的新方法
Journal of Image and Signal Processing 图像与信号处理, 2019, 8(3), 180-193Published Online July 2019 in Hans. /journal/jisphttps:///10.12677/jisp.2019.83024New Template Matching Method for Subpixel Mapping of Linear Feature Mixed PixelsHaiqiang Lu1, Zhaoxin Liu2*, Wei Zhu11Hengchuang Power Equipment Co., Ltd., Jiaxing Zhejiang2College of Computer Science, Hangzhou Dianzi University, Hangzhou ZhejiangReceived: Jul. 4th, 2019; accepted: Jul. 22nd, 2019; published: Jul. 29th, 2019AbstractBy analyzing the problems of subpixel mapping algorithm based on template matching, a linear feature sub-pixel mapping algorithm based on improved template matching is proposed. Based on the correlation coefficient selection template, two new template selection methods are proposed:1) Further determining the template by fitting a line with linear feature mixed pixels eight neigh-borhood, to some extent, reduces the scope of template selection; 2) In order to avoid the uncer-tainty of template selection, the best template is obtained through line fitting on the mixed pixels eight neighborhoods and the template and calculating the linear correlation. Furthermore, com-bined with pixel gravity, the sub-pixel mapping problem of linear feature pixel containing three or more ground objects is solved. The experiment results show that the proposed method can im-prove the sub-pixel mapping accuracy.KeywordsMixed Pixel, Subpixel Mapping, Template Matching, Correlation Coefficient, Line Fitting一种基于模板匹配的线性特征混合像元的亚像元定位的新方法陆海强1,刘照欣2*,朱伟11嘉兴市恒创电力设备有限公司,浙江嘉兴2杭州电子科技大学计算机学院,浙江杭州收稿日期:2019年7月4日;录用日期:2019年7月22日;发布日期:2019年7月29日*通讯作者。
基于D_2样条插值和LOG算子的亚像素边缘检测

基于D_2样条插值和LOG算子的亚像素边缘检测
李艳;彭嘉雄
【期刊名称】《华中理工大学学报》
【年(卷),期】2000(28)3
【摘要】提出了一种基于 D2 样条插值和 LOG算子的亚像素边缘检测方法 .将被检测的图像块在 1 /2 p精度上行列分离分别进行一维 D2 样条插值 ,得到亚像素图像 ,然后将不同尺度的 LOG算子与之卷积。
【总页数】3页(P77-79)
【关键词】图像识别;边缘检测;亚像素;D2样条插值;LOG算子
【作者】李艳;彭嘉雄
【作者单位】华中理工大学图像识别与人工智能研究所
【正文语种】中文
【中图分类】TP391.41;TP751
【相关文献】
1.基于LOG算子的亚像素边缘检测 [J], 吕晓琪;王洪仁;刘建勋
2.应用B样条函数改进LOG算子的边缘检测能力 [J], 孟飞;孙鹏;王仕成;张合新
3.基于三次样条插值的亚象素边缘检测算法 [J], 罗荣芳;林土胜;刘金根
4.基于多重插值的亚像素边缘检测 [J], 田庸;韩震宇;周永洪
5.改进形态学梯度的样条插值亚像素边缘检测方法 [J], 张美静;石振刚
因版权原因,仅展示原文概要,查看原文内容请购买。
一种新的区域图像插值算法

法在基本不改变插值精度 的前提下 , 可以有效地降低运算时间 。 关键词 :图像处理 ;纹理 ;区域划分 ; 参 数选 取 ; 插值算法
中图分类号 :T P 3 9 1 . 4 文献标 识码 :A 文章编号 :1 0 0 0 - - 9 7 8 7 ( 2 0 1 4 ) 0 3 - - 0 1 5 0 - - 0 4
0 引 言
定下降 ; 3 ) 基于边缘保持 的 自适应插值算 法” : 这类 算法 能有效地去 除图像 的锯齿 效果 , 但对小 面积重 复 区域 处理 不足 ; 4 ) 基 于区域 的插 值算 法 : 插值 原理 是 首先 将原 始低 分辨率 图像依 据不同方法 划分 成不 同区域 , 然后将 插值 点 映射 到低 分辨率图像 , 判 断其所属 区域 , 最后根据插值 点的 邻 域像素设计不 同的插值公 式 , 计 算插值 点 的值 。此类 算 法无论从 主观 上还 是客观 上, 图像质 量均 较好 , 但 文 献[ 1 O ] 由于引入了图像分割的方法 , 算法 复杂 度加 大。 针对 已有算法 的一些不足 , 以第 四类算法为指导 , 本文 提 出了一种新 的区域方法用于插值算法 中。该算 法主要思 路为先将待插值 图像 等分 成 M × N个 方格 , 分别 计算 方格 4个端点 的灰度均方差 , 并将 与 阈值 作 比较从 而判
J i ng a n a n Un i v e r s i t y , Wu x i 2 1 4 1 2 2 , C h i n a )
Ab s t ac r t :Ai mi n g a t p r o b l e ms s u c h a s g r a y s c le a d i s c o n t i n u o u s , c o n t o u r f u z z y, l a r g e a mo u n t o f c a l c u l a t i o n a f t e r i n t e r p o l a t e d, e x i s t s i n t r a d i t i o n a l t h r e e k i n d s o f i ma g e i n t e po r l a t i o n a l g o i r t h ms , p r o p o s e a n e w r e g i o n l a i n t e po r l a t i o n a l g o i r t h m. T h e a l g o it r h m i f r s t d i v i d e s i ma g e a c c o r d i n g t o l f a t o r c o mp l e x o f i ma g e t e x t u r e , t h e n a c c o r d i n g t o r e g i o n t h e i n t e po r l a t i o n p o i n t b e l o n g i n g t o i n t h e s o u r c e i ma g e c o r r e s p o n d i n g l y u s e s d i f f e r e n t i n t e po r l a t i o n lg a o i r t h ms . T h e s i mu l a t i o n r e s u l t s v e i r i f e d t h a t t h i s lg a o r i t h m c a n e f f e c t i v e l y r e d u c e s t h e o p e r a t i o n t i me w i t h o u t c h a n g i n g t h e i n t e r p o l a t i o n p r e c i s i o n, c o mp a r e d w i t h s o me t y p i c a l i n t e po r l a t i o n lg a o r i t h ms .
光纤传感系统中光斑中心亚像素定位算法
33 非线性权值的改进 . 为 了突出灰度值大 的像素对 中心定位 的作用 ,提高其权
值 比重 ,将传统灰度重 心法 的线性关系改为非线性关系 ,若
^ 卅
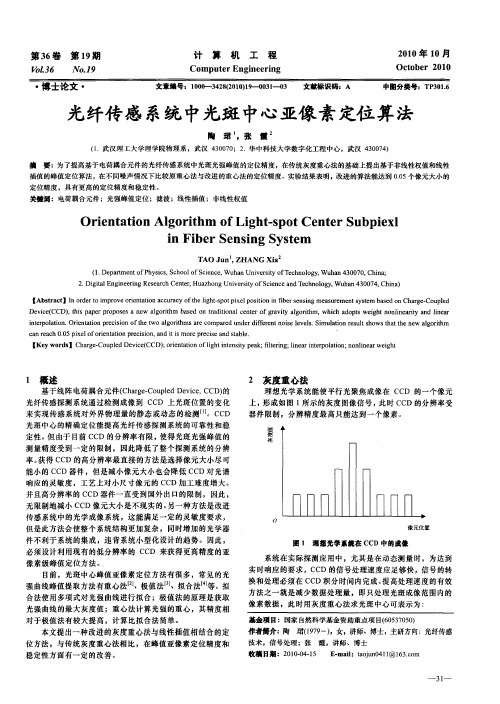
so 大值 所 在 的位置 i (最 即为 一 维 图像 光 斑 中 心粗 略位 置
C。 B 为阈值 ,其值小于光斑区域灰 度最小值且大干光斑 区域外背景 的灰度值。设定 。 以减少算法在 图像 背景 区 可 域的计算 , 主要在灰度值较高的光斑 区域进行 灰度和的计算。
能小 的 C D器件 ,但是减小像元大小 也会 降低 C D对光谱 C C 响应 的灵敏度 ,工艺上对小尺寸像元的 C D加工难度增大 。 C 并且高分辨率 的 C D器件一直受到国外出 口的限制 ,因此 , C
无限制地减小 C D像元大小是不现实的。 C 另一种 方法是 改进 传感系统 中的光学成像系统 ,这 能满足一定 的灵敏度要 求,
但是此方法会使整个系统结构更加复杂 ,同时增加 的光学器
D
像元 位置
件不利于 系统的集 成 ,违 背系统小 型化设 计的趋势 。因此 , 必须设计利用现有 的低分辨率 的 C D 来获得 更高精度 的亚 C
像素级峰值 定位方法。 目前 ,光斑 中心峰值亚像素定位 方法有很多 ,常见 的光 强曲线峰值提取方法有重心法 、极值法 、拟合法【等 。拟 J J 4
图 1 理想光 学系统在 C D中 的成像 C
系统在实 际探测应用 中,尤其是在动态测量时 ,为达 到 实时响应的要求 ,C D 的信号处理速度应足够快,信号的转 C
换和处理必须在 C D积分 时间内完成 。 C 提高处理速度的有效 方法之一就是减少数据处理量 ,即只处理光斑成像范 围内的
高光谱rxd算法
高光谱rxd算法
高光谱RxD算法是一种用于高光谱图像异常检测的算法。
RxD算法是Reed-XiaoliDetector的简称,它是一种基础的异常目标检测算法,适用于对特定场景的异常(未知目标)检测。
在高光谱图像中,RxD算法通过检测与背景分布中心相比属于异常像元,并在这些感兴趣区域进一步查找可能存在的目标,来实现对异常的检测。
该算法不需要目标光谱的先验知识,而是基于背景服从多元正态分布的假设,通过检测与背景分布中心相比属于异常像元,并在这些感兴趣区域进一步查找可能存在的目标。
该算法主要针对的是小目标检测问题。
高光谱RxD算法的具体步骤包括:
1. 确定感兴趣区域:根据场景需求和先验信息,确定需要检测的目标类型和区域范围。
2. 构建背景模型:通过对高光谱图像中背景区域的像素进行统计分析,构建出背景模型的统计特征,如均值、方差、协方差等。
3. 异常检测:将待检测像素与背景模型进行比较,如果其统计特征与背景模型存在显著差异,则认为该像素为异常像素。
4. 可视化结果:将检测到的异常像素进行可视化处理,以突出显示异常区域。
高光谱RxD算法具有较好的实时性和准确性,可以广泛应用于高光谱图像的异常检测中。
然而,该算法对背景模型的建立和参数选择较为敏感,可能会受到光照变化、阴影等因素的影响。
因此,在实际应用中需要根据具体场景和需求进行算法的调整和优化。
一种基于图像相位信息的亚像素微位移测量算法
一种基于图像相位信息的亚像素微位移测量算法王庆;刘大亮;刘忠;樊莉;王雅君;杜鹃;刘延平【摘要】综合考虑了图像的振幅和相位信息,并按相位涡旋的物理和几何特征,研究了基于数字散斑图像相位奇点匹配的位移测量算法.该算法对图像的交流信号,经用希尔伯特变换方法,提取散斑图像的实部和虚部信息,并用曲面拟合方法确定相位奇点的坐标,从而确定图像序列间的位移.试验结果表明,相位奇点匹配算法具有良好的精确度和稳定性.【期刊名称】《机械管理开发》【年(卷),期】2012(000)001【总页数】3页(P82-83,85)【关键词】散斑图样;相位奇点匹配;亚像素测量【作者】王庆;刘大亮;刘忠;樊莉;王雅君;杜鹃;刘延平【作者单位】首都航天机械公司,北京100076;首都航天机械公司,北京100076;首都航天机械公司,北京100076;首都航天机械公司,北京100076;首都航天机械公司,北京100076;首都航天机械公司,北京100076;首都航天机械公司,北京100076【正文语种】中文【中图分类】TP317.41 概述基于数字图像分析的位移测量方法[1,2],已经成为常用的有效的光学测量手段广泛用于实验力学以及其它科研领域和工程实际。
该方法建立在“灰度不变假设”和光流方程理论的基础上,根据图像序列,估计图像中物体的运动。
其中,通过求解相关函数进行位移测量的方法,被称为数字散斑相关法[3];基于光流方程,通过求解图像信号梯度进行位移测量的方法,被称为基于梯度的位移测量方法[4,5]。
数字散斑相关法和梯度法处理的信号,均为数字图像信号的实振幅(光强)信息,而忽略了数字图像信号的相位信息。
实际上,散斑图样是一个相位和振幅空间均随机分布的复杂光场,每个光强零点都存在着一个相位奇点,每个相位奇点发散地向外延伸出若干条等相位曲线;随着光场的传播,这些等相位曲线围绕对应奇点旋转,从而在空间绘出一系列螺旋形图样,称为相位涡旋。
一种基于Hough变换新的亚像素定位算法
一种基于Hough变换新的亚像素定位算法陈光静;陈明贵;肖玉强【摘要】为了提高数字摄影测量的精度,提出了一种基于Hough变换的亚像素定位算法,针对直线边缘检测和圆边缘检测,分刺采用二次Hough变换法和三等分Hough变换法,通过使用二次Hough变换的方法,克服了直线边缘计算精度低和速度慢的问题,通过使用三等分Hough变换法,克服了传统Hough变换法圆边缘检测性能受参数离散间隔制约及精度低的问题.仿真和实验表明新算法的亚像素定位精度能达到O.02像素,有效地提高了数字摄影测量的精度.【期刊名称】《电子设计工程》【年(卷),期】2010(018)012【总页数】4页(P127-130)【关键词】数字摄影测量;Hough变换;亚像素定位;直线边缘检测;圆边缘检测【作者】陈光静;陈明贵;肖玉强【作者单位】西安通信学院,电子工程系,陕西,西安,710106;西安通信学院,电子工程系,陕西,西安,710106;西安电子科技大学,机电工程学院,陕西,西安,710071【正文语种】中文【中图分类】TP301测量的方式、方法正向多样化发展,对几何量测量来说,其测量尺度正在向两个极端发展——小尺寸方向和大尺寸方向。
小尺寸方向是指新型微米测量和纳米测量的研究与应用;大尺寸测量指几米至几百米范围内物体的空间位置、尺寸、形状、运动轨迹等的测量,数字摄影测量是近几年发展起来的一种非接触测量技术[1],已广泛用于几何量的测量中,其测量精度的关键技术之一是亚像素定位算法。
本文分析了数字摄影测量的基本原理,提出了一种基于Hough变换的用于检测直线和圆的亚像素定位算法,并对亚像素定位算法进行了仿真和实验,结果表明亚像素定位精度能达到0.02像素[2],有效地提高了数字摄影测量的精度。
提下,像点、光心和物点满足共线方程,即三点共线。
精确地确定由像点和光心组成的射线是摄影测量的关键,要做到这一点,就要注意两个关键因素:1)精确地确定摄影系统的系统参数,如光心、光轴和焦距;2)精确地提取目标的对应像点的位置。
基于三次样条插值的亚象素边缘检测算法
基于三次样条插值的亚象素边缘检测算法
罗荣芳;林土胜;刘金根
【期刊名称】《计算机工程与应用》
【年(卷),期】2006(42)24
【摘要】文章将灰阶Sobel算子、中值滤波、三次样条插值和边缘细化算法相结合而提出的一种新图像边缘检测算法,该算法在实际应用中具有较好的边缘检测效果,不但能使目标的边缘连续、光滑,而且其几何形状和大小与实际目标更接近,有效地解决了模糊图像边缘检测的问题,并使得边缘定位的精度提高到亚象素级.
【总页数】3页(P68-70)
【作者】罗荣芳;林土胜;刘金根
【作者单位】华南理工大学电子与信息学院,广州,510640;广东工业大学,广
州,510640;华南理工大学电子与信息学院,广州,510640;武汉理工大学信息工程学院,武汉,430070
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于非线性四阶图像插值的亚像素边缘检测算法 [J], 吴鹏;徐洪玲;宋文龙;曹军
2.基于小波变换的三次样条插值亚像素边缘定位 [J], 巩丽丽;李春
3.基于空间矩的亚象素边缘定位技术的研究 [J], 刘亚威;杨丹;张小洪
4.基于高斯拟合的亚像素边缘检测算法 [J], 韩东;李煜祺;武彦辉
5.基于Zernike正交矩的图像亚像素边缘检测算法改进 [J], 王肃国;李龙华
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种新型基于插值的高光谱图像亚像元定位算法王鹏;王立国【摘要】在高光谱图像亚像元定位领域中,基于插值的亚像元定位算法具有无参数、无迭代、快速运算等优点,得到了广泛的应用.传统的基于插值的亚像元定位算法由于原始高光谱图像分辨率低和现有的光谱解混技术的局限性,使得丰度图像不能充分携带原始高光谱图像的先验信息.针对这一问题,提出了一种新型基于插值的高光谱图像亚像元定位算法.将插值算法直接应用于原始低分辨率高光谱图像,得到高分辨率图像.将高分辨率图像通过光谱解混得到具有丰富原始图像先验信息的丰度图像,利用丰度图像提供的信息将类别标签分配到每个亚像元中,获得亚像元定位结果.仿真实验证明,该方法可以充分地携带原始图像的先验信息,获得比传统的基于插值的亚像元定位算法精度更高的结果.【期刊名称】《黑龙江大学自然科学学报》【年(卷),期】2018(035)006【总页数】5页(P726-730)【关键词】高光谱图像;亚像元定位;插值;光谱解混【作者】王鹏;王立国【作者单位】哈尔滨工程大学信息与通信工程学院,哈尔滨150001;南京航空航天大学电子信息工程学院,南京211106;哈尔滨工程大学信息与通信工程学院,哈尔滨150001【正文语种】中文【中图分类】O241.820 引言亚像元定位(Subpixel mapping,SPM)可以用来探索土地覆盖类别的空间分布信息[1]。
传统的SPM方法主要包含两个处理步骤:亚像元锐化和类别分配[2]。
通过亚像元锐化方法可估计出每个类别内所有的亚像元的软属性值(0到1之间的概率隶属度信息);再根据每个亚像元软属性值的大小和每个类别亚像元的数目固定的限制,利用类别分配方法将硬属性值(类别标签)分配到每个亚像元中,得到亚像元的定位结果[3]。
常用的方法,如Hopfield神经网络、空间引力模型、BP神经网络和一些合适的超分辨率方法都可以作为亚像元锐化方法[4]。
基于插值的亚像元定位算法具有无参数、无迭代、快速运算等优点,得到了广泛的应用[5-6]。
传统的基于插值的亚像元定位方法,由于原始高光谱图像分辨率低和光谱解混技术的局限性[7],使得通过光谱解混获得的丰度图像不能充分携带原始高光谱图像的先验信息,影响定位结果的精度。
本文提出了一种新型基于插值的高光谱图像亚像元定位算法,该方法利用插值方法直接提高原始低分辨率图像的分辨率,通过解混高分辨率图像获得具有丰富原始图像先验信息的丰度图像,采用类别分配方法获得了亚像元的精确定位结果。
1 传统的基于插值的高光谱图像亚像元定位算法假设一幅原始低分辨率高光谱图像通过光谱解混技术产生K幅低分辨率丰度图像Lk(k=1, 2, ..., K, K表示地物类别的数量);S是比例尺度,则每个像元将会被分割成S×S个亚像元;表示像元PJ(J=1, 2, ..., M, M是低分辨率丰度图像中像元的数量)属于第k类的丰度值;表示通过亚像元锐化方法获得的亚像元pj(j=1, 2,..., MS2, MS2是亚像元的总数目)属于第k类的软属性值。
传统的基于插值的亚像元定位结构模型如图1所示。
原始低分辨率高光谱图像通过光谱解混技术获得低分辨率丰度图像作为输入;通过插值算法,产生具有亚像元软属性值Hk(pj)的精细空间分辨率图像Hk(k=1, 2,..., K,K表示地物类别的数量);在式(1)的限制下,依据亚像元软属性值通过合适的类别分配方法将硬属性值(类别标签)分配到各个亚像元当中,最终获得亚像元定位结果:Nk(PJ)=Round(Lk(PJ)S2)(1)式中:Nk (PJ) 表示属于第k类的亚像元数目;Round(·) 表示取接近Lk(PJ)S2的整数值。
图1 传统的基于插值的亚像元定位流程图Fig.1 Flowchart of the traditional interpolation-based subpixel mapping2 一种新型基于插值的高光谱图像亚像元定位算法通过对基于插值的亚像元定位的处理流程分析发现,传统方法中精细的空间分辨率图像都是通过原始高光谱图像进行先解混后插值的处理方式获得的,由于原始低分辨率图像中各个类别分布的不确定性和现有光谱解混技术的局限性,使得原始高光谱图像中的先验信息不能被充分利用,进而导致亚像元定位的精度受到影响。
为了更加充分地利用原始图像中的先验谱信息,改善亚像元定位结果,提出了一种新型的基于插值的亚像元定位方法。
该方法首先用插值法直接改进原始图像的分辨率,得到高分辨率图像,如图2所示。
通过解混高分辨率图像得到具有丰富原始图像先验信息的丰度图像。
依据丰度图像提供的信息,通过合适的类别分配方法,将类别标签分配到每个亚像元中,获得最终的结果。
本文选择依据线性优化技术分配的原则(Linear Optimization Technique,LOT)作为类别分配方法[8]。
该方法利用插值算法直接将原始图像分辨率提高,使得丰度图像能够更加充分地提取原始图像的先验信息,从而获得定位精度更高的结果。
图2 新型的基于插值的亚像元定位流程图Fig.2 Flowchart of the novel interpolation-based subpixel mapping3 仿真实验结果及分析选择两组真实的高光谱数据进行仿真实验,插值方法选择双线性插值和双三次插值[9]。
双线性插值记为NSPM-BI,双三次插值记为NSPM-BIC。
与传统的基于双线性插值的亚像元定位方法(SPM-BI)和基于双三次插值的亚像元定位方法(SPM-BIC)[10]进行比较。
选取每个类别的定位精度OAi、总体精度评PCC系数和Kappa系数作为精度评价的指标。
同时,模拟的低分辨率图像都将通过原始图像进行采样。
3.1 实验一选择帕维亚大学数据集作为本次实验的研究数据。
该数据是用ROSIS光谱仪拍摄于帕维亚大学的工程学院[11]。
选择大小为100 100个像元的区域作为测试对象,如图3 (a)所示(RGB波段:19,30,44)。
区域主要包括沥青、草地、树木和砖瓦四个主要类别。
图3 (b)用来作为参考图像,没标记的类别用黑色代替。
为了模拟真实情况,将原始高分辨率高光谱图像通过比例尺度S=4的均值滤波器进行降采样,产生模拟的粗糙低分辨率图像。
图3 帕维亚大学数据集Fig.3 ROSIS data of University of Pavia亚像元定位结果如图3(c)~图3(f)所示。
通过视觉比较可以发现,图3(c)和3(d)中由于丰度图像没有丰富的原始图像先验信息,亚像元定位结果不理想。
例如沥青和瓦砖边缘存在许多毛刺,看起来十分粗糙。
这些现象在图3(e)~图3(f)中得到明显的缓解,这是由于所提出的方法中丰度图像具有更加丰富的原始图像先验信息,定位结果与参考图像更加相似。
其中,由于双三次插值比双线性插值具有更好的亚像元锐化效果,因此,NSPM-BIC产生的结果在视觉上最接近参考图像。
除了直观视觉比较外,实验一中四种亚像元定位结果中各类别的定位精度OAi和整体定位精度PCC也被测试。
精度评价指标如表1所示,可以发现,对比传统的SPM-BI和SPM-BIC方法,所提出的NSPM-BI和NSPM-BIC能够得到更高精度的结果。
表1 实验一中四种方法的定位精度(%)(S=4)Table 1 Accuracy of 4 methods in experiment 1 (S=4)SPM-BISPM-BICNSPM-BINSPM-BIC草地90.0490.8691.2993.74沥青78.8487.8090.1991.22树木30.0233.9434.3038.32瓦砖60.3662.6366.8269.95PCC73.6675.4677.8680.36 3.2 实验二选择用HYDICE成像仪获得华盛顿DC数据集[10]。
选取大小为240 × 300个像元作为本次实验的研究区域,如图4(a)所示(RGB波段:65,52,36)。
该区域较之前的实验类别分布更为复杂,主要包括背景、湖水、道路、树木、草地、屋顶和小径7个类别。
通过分类算法获得如图4(b)所示的参考图像[12]。
为了考虑多种比例尺度下所提出方法的性能,选择S=3、S=4、S=6三种比例尺度去模拟低分辨率图像。
与实验一得到的结论相似,在视觉上由于传统的基于插值的亚像元定位算法没有充分利用原始图像先验信息时,图4(c)~图4(d)存在着大量的散斑效应。
由于利用更多的先验信息,图4 (e)~(f)所提出的方法更加接近原始的参考图像。
图5(a)~图5(b)所示的是在三种尺度下四种方法的PCC系数和Kappa系数,与前述实验结果一致,所提出的方法较传统的基于插值的亚像元定位方法可以获得更高的定位精度。
图4 华盛顿DC数据集Fig.4 The Washington, DC data图5 (a) 四种方法的PCC(%) 与比例尺度S的关系; (b) 四种方法的Kappa 与比例尺度S的关系Fig.5 (a) PCC (%) of 4 methods with different zoom factor S;(b) Kappa of 4 methods with different zoom factor S4 结论提出了一种新型基于插值的高光谱图像亚像元定位算法,与传统的基于插值的亚像元定位方法相比,此方法能更充分地利用原始高光谱图像的先验信息。
此方法继承了传统方法处理速度快、不需要先验的辅助信息等优点。
仿真实验表明,此方法获得的定位结果在视觉上更加连续和平滑,精度评价指标更高。
本文选择了快速有效的双线性插值和双三次插值作为插值方法,今后寻找更有效的插值方法以获得更好的定位结果是值得研究的问题。
参考文献【相关文献】[1]张兵,高连如.高光谱图像分类与目标检测 [M]. 北京: 科学出版社, 2011.[2]WANG Q, SHI W, WANG L. Allocating classes for soft-then-hard sub-pixel mapping algorithms in units of class [J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 5(5): 2940-2959.[3]WANG P, WANG L G. Soft-then-hard super-resolution mapping based on a spatial attraction model with multiscale sub-pixel shifted images [J]. International Journal of Remote Sensing, 2017, 38(15): 4303-4326.[4]WANG Q, SHI W, ATKINSON P M. Sub-pixel mapping of remote sensing images based on radial basis function interpolation [J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2014, 92(1): 1-15.[5]WANG P, WANG L, MURA M D, et al. Using multiple subpixel shifted images withspatial-spectral information in soft-then-hard subpixel mapping [J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2017, 10(6): 2950-2959.[6]CHEN Y, GE Y, SONG D. Superresolution land-cover mapping based on high-accuracy surface modeling [J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(12): 2516-2520.[7]赵春晖,金文超.利用约束非负矩阵分解的高光谱解混算法 [J]. 黑龙江大学自然科学学报,2012, 29(6): 817 -821.[8]VERHOEYE J, WULF R D. Land-cover mapping at sub-pixel scales using linear optimization techniques [J]. Remote Sensing of Environment, 2002, 79(1): 96-104.[9]苏衡, 周杰, 张志浩. 超分辨率图像重建方法综述 [J]. 自动化学报, 2013, 39(8): 1202-1213.[10]凌峰, 吴胜军, 肖飞, 等. 遥感影像亚像元定位研究综述 [J]. 中国图像学报, 2011, 16(8): 1335-1345.[11]WANG L, WANG Q. Subpixel mapping using Markov random field with multiple spectral constraints from subpixel shifted remote sensing images [J]. IEEE Geoscience and Remote Sensing Letters, 2013, 10(3): 598-602.[12]VILLA A, CHANUSSOT J, BENEDIKTSSON J A, et al. Unsupervised methods for the classification of hyperspectral images with low spatial resolution [J]. Pattern Recognition, 2013, 46(6): 1556-1568.。