土压平衡盾构机主减速器三级行星齿轮系统动力学
土压平衡盾构工作原理及结构演示幻灯片44页PPT

56、书不仅是生活,而且是现在、过 去和未 来文化 生活的 源泉。 ——库 法耶夫 57、生命不可能有两次,但许多人连一 次也不 善于度 过。— —吕凯 特 58、问渠哪得清如许,为有源头活水来 。—— 朱熹 59、我的努力求学没有得到别的好处, 只不过 是愈来 愈发觉 自己的 无知。 ——笛 卡儿
拉
60、生活的道路一旦选定,就要勇敢地 走到底 ,决不 回头。 ——左
土压平衡盾构工作原理及结构演示幻
ห้องสมุดไป่ตู้
灯片
21、没有人陪你走一辈子,所以你要 适应孤 独,没 有人会 帮你一 辈子, 所以你 要奋斗 一生。 22、当眼泪流尽的时候,留下的应该 是坚强 。 23、要改变命运,首先改变自己。
24、勇气很有理由被当作人类德性之 首,因 为这种 德性保 证了所 有其余 的德性 。--温 斯顿. 丘吉尔 。 25、梯子的梯阶从来不是用来搁脚的 ,它只 是让人 们的脚 放上一 段时间 ,以便 让别一 只脚能 够再往 上登。
一般土压平衡盾构机工作原理
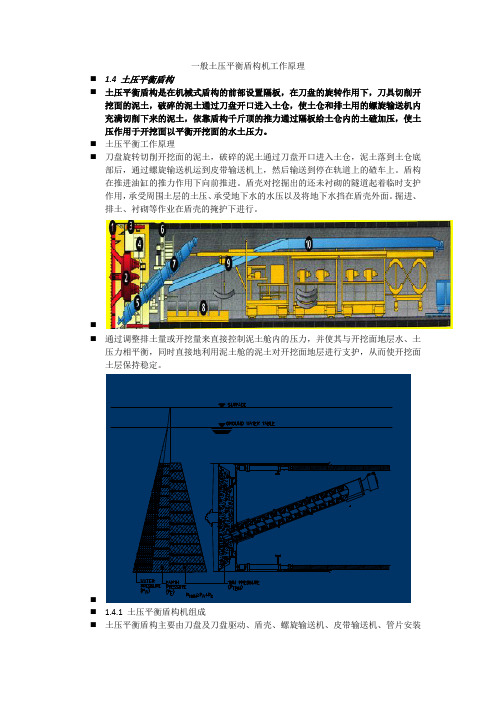
一般土压平衡盾构机工作原理⏹ 1.4 土压平衡盾构⏹土压平衡盾构是在机械式盾构的前部设置隔板,在刀盘的旋转作用下,刀具切削开挖面的泥土,破碎的泥土通过刀盘开口进入土仓,使土仓和排土用的螺旋输送机内充满切削下来的泥土,依靠盾构千斤顶的推力通过隔板给土仓内的土碴加压,使土压作用于开挖面以平衡开挖面的水土压力。
⏹土压平衡工作原理⏹刀盘旋转切削开挖面的泥土,破碎的泥土通过刀盘开口进入土仓,泥土落到土仓底部后,通过螺旋输送机运到皮带输送机上,然后输送到停在轨道上的碴车上。
盾构在推进油缸的推力作用下向前推进。
盾壳对挖掘出的还未衬砌的隧道起着临时支护作用,承受周围土层的土压、承受地下水的水压以及将地下水挡在盾壳外面。
掘进、排土、衬砌等作业在盾壳的掩护下进行。
⏹⏹通过调整排土量或开挖量来直接控制泥土舱内的压力,并使其与开挖面地层水、土压力相平衡,同时直接地利用泥土舱的泥土对开挖面地层进行支护,从而使开挖面土层保持稳定。
⏹⏹ 1.4.1 土压平衡盾构机组成⏹土压平衡盾构主要由刀盘及刀盘驱动、盾壳、螺旋输送机、皮带输送机、管片安装机、推进油缸、同步注浆系统和辅助装置等组成。
⏹适用:软土、软岩(含水/不含水)地层的隧道开挖与衬砌⏹Φ4.33m加泥式土压平衡盾构⏹ 1.4.2土压平衡盾构(EPB)工作原理⏹土压平衡盾构的工作原理⏹通过调整排土量或开挖量来直接控制泥土舱内的压力,并使其与开挖面地层水、土压力相平衡,同时直接地利用泥土舱的泥土对开挖面地层进行支护,从而使开挖面土层保持稳定。
⏹EPB工作原理图⏹EPB⏹ 1.4.3 土压平衡盾构特点⏹土压平衡盾构的特点:⏹主要通过控制盾构开挖速度和螺旋输送机转速,达到控制土压的目的⏹整体结构⏹ 1.5 盾构机的构造⏹土压平衡盾构机构成:⏹ 1.盾壳、盾构推进千斤顶、盾尾密封、铰接装置、人员舱⏹ 2.刀盘和刀盘驱动支承机构⏹ 3.螺旋输送机⏹ 4.管片拼装机⏹ 5.后配套设备。
土压平衡盾构机行星减速器动态性能测试与分析

度响应 , 综合评价减速器振动烈度 。在采用隔声 罩有效 降低背景噪声 的基础上 , 运用声压法合理性。振动噪声信 号时频分析及边频特征表 明齿轮制造精度较 高。实验结果 表明该盾构机 主减 速器
振 第 3 卷 第 9期 1
动
与
冲
击
V0. No 9 01 131 . 2 2
J OURNAL BRATI OF VI ON AND HOC S K
土压 平衡 盾构 机 行星 减速 器 动态 性 能测试 与分 析
肖正明 ,秦大同 ,武文辉 ,陈立锋 周志刚 ,
r q e ce f te g abo . fe u n i s o h e r x Th ir to r p ry o h e r o s a ay e y u i g t c e ea in d t c u r d e vb ain p o e t ft e g a b x wa n lz d b sn he a c lr to aa a q ie
振动噪声性能指标达到项 目要求及设 计 目标。 关键词 :盾构机 ; 多级行星减速器 ; 动态性能 ; 测试
中 图分 类 号 :T 3 H12 文 献 标 识 码 :A
Te tng a d a a y i n d n m i e f r a c fp a e a y g a bo n EPB h ed t neln a hi s i n n l ss o y a c p r o m n e o l n t r e r x i s i l un li g m c ne
土压平衡盾构机

术语和定义
3.1 土压平衡盾构 Earth pressure balance shield machine 由刀盘旋转切削土体,切削后的泥 土进入密封土舱,在密封土舱内泥土压力与开挖面泥土压力取得平衡的同时,由螺旋输送机 进行连续出土的盾构。适合在粘土、砂土、砂砾等土层中进行掘进施工。 3.2 刀盘 Cutting wheel 在盾构前端装有刀具,能旋转切削土体的钢结构。 3.3 刀盘驱动装置 Main drive 驱动刀盘旋转的装置。该装置包括液压设备(或电动机、离合 器)、减速器、大小齿轮、大轴承等。 3.4 管片 Segment 构筑隧道衬砌的拼装式预制弧型构件。有钢筋混凝土管片、复合管片和 钢管片等。 3.5 管片拼装机 Erector 拼装管片的机械装置。能夹持管片,作圆弧运动、径向运动和纵 向运动等。 3.6 螺旋输送机 Screw conveyor 输送土仓中土体的机械装置,包括螺旋机和驱动装置。 3.7 盾构壳体 Shield 保护掘进设备的钢结构外壳。包括切口环、支承环、盾尾环三部分。 3.8 盾尾密封系统 Tail skin seal system 为防止衬砌环与盾构之间施工空隙涌水、漏泥而设 置,由密封刷和油脂加注装置等组成的系统。 3.9 后方台车 Gantry 在隧道内装载着掘进所需主要机、电、液装备并跟随在盾构后行走的 台车。 3.10 推进液压缸 Thrust jack 用来推动盾构前进的液压缸,能克服盾构推进时所遭遇的阻 力。 3.11 铰接装置 Articulation 为确保隧道曲线段施工而设置。主要由铰接液压缸、密封装置 以及铰接止转装置等组成。 3.12 盾构外径 Outer diameter 盾构的外径即指盾壳的最大外径。 3.13 盾构总长 Total length of shield 盾构总长是指盾构最前点至后方台车最后点长度的最 大值。 3.14 盾构主机长度 Length of shield including screw conveyor 盾构主机长度是指盾构的最 前点到螺旋机最末点的长度。 3.15 盾构总重 Total weight of shield 盾构总重指盾构总长范围内所有设备及结构件的总重 量。 3.16 开口率 Open ratio 刀盘开口率是面板开口部分的面积 (刀头投影面积忽略不计)与 刀盘面积 的比值,即 。 3.17 盾构推进速度 Advance speed 盾构推进速度是指盾构工作时的掘进速度。 3.18 盾构装备推力 Thrust force 盾构的装备推力盾构推进机构所能提供的最大推力。 3.19 盾构灵敏度 Sensitivity 盾构灵敏度即盾构壳体长度与盾构外径的比值。 3.20 盾尾间隙 Tail clearance 盾尾间隙是指衬砌环外径与盾构壳体内径之间的间隙。
土压平衡盾构机结构PPT课件

SPS
---------------------------------------
[TBM PLC]
MODEM LINK TO OFFICE
TBM Control Cabin
谢谢!
盾构
刀盘
盾壳
回转 机构
膨润土系 统接口
后配套
压缩空气
泡沫发生器
M
`
泡沫泵
M
泡沫剂箱
水泵 螺旋输送机
水箱
泡沫及膨润土系统示意图
导向系统
• 采用自动导向系统的必要性 • VMT导向系统自动测量盾构机当前位置,实时提
供盾构姿态,是主司机控制掘进方向的依据 Target Board 1
Target Board 2
LASER
导向系统简图
Purpose built for tunnel conditions
Tunnel segment
ELS TARGET
LASER THEODOLITE
YELLOW BOX
TBM
CONTROLLER UNIT - SLUM
TAIL - SKIN CLEARANCE DistMoDEisAtoSDUisRtoEDMisEtoNDTisto
PILOT PUMP
面板说明
润滑油泵 超挖刀泵
刀盘
面板说明
面板说明
超挖刀
前体
前体
中体
面板说明
推进泵 辅助泵
面板说明
推进系统
面板说明
推进系统
推进控制
电磁阀线圈 行程传感器
推进控制
推进控制
面板说明
推进油缸
盾尾
• 盾尾密封
– 始发手涂油脂
日本小松“土压平衡”式盾构机电子版说明书第二章构造篇
第二章构造篇1、运转席本机在后续台车(之前进方向看右边)的操作室内,设有运转操作席,并聚集了运转时常常利用的操作仪器和监视仪器类。
2、盾构本体:构造:本体由前盾和中盾及盾尾部份组成.前盾由刀盘及刀盘支撑组成,在土仓隔壁下部配有螺旋机.在中盾部内周方向配备22根油缸,盾尾部内部配有拼装机及突出作业台.另外,在机内也配有点检用平台/液压电气装置/测量仪器/人闸/注入管等附属装置.3、尾封尾封设在盾构主体最后部,是避免土砂、水及同步注浆材的侵入的随动性、耐久性优良的钢丝刷式尾封,装有3道。
本机装有尾封油脂加注系统。
4、切削刀盘形式闭锁扁平式、双回转掘削式。
构造钢板焊接构造。
前面装备刮刀、GAUGE刀和箭形刀等,外周装有2个超挖刀(1个备用)及保护外周的刮刀。
另外,前面设有注浆口3个,里面按装搅拌杆。
切削刀盘通过6根中间梁和主轴经受刀盘支撑支撑,由8台减速马达驱动。
5、超挖刀形式液压油缸驱动式构造由超挖刀、液压油缸、传动机构组成,进行盾构外周的超挖。
超挖可在0-359度之间,能够圆周的16分之1(度)单位组合的范围内设定。
配有2个超挖刀装置:其中一个是备用的。
6、切削刀盘支撑构造由固定部、回转部、辊子轴承和密封部份组成,固定部份在盾构主机前方支撑着。
辊子轴经受切削刀盘的轴向力、径向负荷和力矩,支撑、驱动切削刀盘的旋转。
润滑方式辊子轴承部份:油浴强制润滑式密封部份:集中自动供油式。
7、切削刀盘驱动装置形式减速电机驱动式(变频调速控制)。
构造由装在切削刀盘座背面的8台减速电机和小齿轮组成,通过辊子轴承内的齿轮,驱动切削刀盘。
回转方向可正可逆。
回转速度采用的5档切换式。
8、切削刀盘回转检测装置构造由齿轮、接近开关组成。
装在切削刀盘座背面中央。
9、人出入闸设在盾构主机中央,在土仓内点检等作业时利用。
10、管片拼装机形式旋转环液压式构造由旋转环、起落机架、拼装机头、导向轮及边托辊等组成。
主机的旋转由液压马达驱动;起落、滑动、止偏、扩张由液压油缸驱动。
(完整版)土压平衡盾构课件

• 超挖刀照片
2、刀盘支撑:
• 构造:由固定部(齿轮箱部分)、回转部、主轴承和 密封部分构成,固定部由盾构主机前侧切口环支撑 固定。
• 主轴承承受切削刀盘的轴向、径向负荷和力矩,支 撑刀盘的回转及传动。
1、切削刀盘
• 形式:平面面板式、顺、逆时针回转方向掘削。 • 构造:钢板焊接结构。 • 刀盘前面设有5处注泥口,刀盘背面设有搅拌棒。 • 切削刀盘由6根圆柱形中间悬梁通过主轴承由刀
盘支撑结构支撑。由8台减速变频电机驱动。
• 刀盘面装备有切削刀、边刀、箭形刀等,刀盘配备有2套 超挖刀(1套为预备)。
• 切削刀、刮刀的安装采用辐条二侧螺栓连接、背装式设 计,方便作业人员在刀盘背后(土仓内)进行刀具的拆 装工作。
中心切削刀
正面切削刀
周边刮刀
先行刀
• 超挖刀:
• 形式:液压油缸驱动式。
• 构造:由超挖刀、驱动油缸、导向滑动机构构成,可 对盾构机外周土体进行超挖。以圆周的16分之 1(22.5゜) 为设定单位,在0゜~359゜超挖范围内进 行设定。超挖刀配备有2套(其中一套为预备用)。
四、土压平衡盾构机构造 (以小松TMX634为例)
• 土压平衡盾构机主要由盾壳、开挖系统、推 进系统、排土系统、管片拼装系统、油压、 电气、控制系统、姿态控制装置、导向系统、 壁后注浆装置、后拖台车、集中润滑装置、 超前钻机及预注浆、铰接装置、通风装置、 碴土改良装置及其他一些重要装置如人闸等 组成。
所有盾构的形式,其本体从工作面开始均可分 为切口环(前体)、支承环(中体)和盾尾三部 分,借以外壳钢板联成整体。
盾构主机
1、 盾构机本体:
❖ 在切口环部设有安装刀盘及刀盘支撑的结构,在土仓胸板下 部安装有螺旋机。
盾构机双驱动大功率行星齿轮的传动原理及特性

重 庆 大 学 学 报 J o u r n a l o f C h o n i n U n i v e r s i t g q g y
V o l . 3 4N o . 3 M a r . 2 0 1 1
) 1 0 0 0 5 8 2 X( 2 0 1 1 0 3 0 0 1 0 6 文章编号 : - - -
出, 能通过改变 驱 动 电 机 的 个 数 满 足 阻 力 矩 变 化 较 但是 都 需 要 多 个 电 机 同 时 驱 动 多 个 行 星 大的要求 ; 减速器 , 故结构复杂 、 体积庞大 , 且存在不同步问题 。 笔者提出一种 双 驱 动 大 功 率 行 星 齿 轮 传 动 系 统 , 分 析了传动系统 的 运 动 , 得 到 该 系 统 的 传 动 特 性。 该 调 速 范 围 宽、 承 载 能 力 强, 可实现低 系统传动比大 、 速大扭矩输出 的 功 能 , 满足盾构机阻力矩变化大的 并且 整 体 体 积 小 , 结 构 简 单, 还可有效解 工作要求 , 同时用一套双驱动传动系统还可实 决不同步问题 ; 现大中型泥水平衡式 、 中小型土压平衡式 、 大型土压 平衡式等 3 种型式的盾构机传动系统功能 。
输入封闭机构的动力通过双路径传递一部分由齿圈10最后由齿圈11输出实现封闭机构的功率分流功能而且载荷由齿圈10太阳轮12行星轮13行星架数学模型的建立根据机械原理采用行列式分析轮系运动学的方法结合双驱动大功率行星传动系统减速器的传动简减速器的联系图图中s1r1分别表示行星轮系的外齿齿数
第3 4 卷第 3 期 2 0 1 1年3月
2
重 庆 大 学 学 报 第 3 4卷
6] 。 相比较而 式盾构机已成为世界范围的主流产品 [ ] 7 8 - 言, 泥 水 平 衡 式 盾 构 机 要 求 输 出 扭 矩[ 较 大, 并且 ] 9 1 0 - 。 要 求 驱 动 系 统 输 出 扭 矩 越 大[ [ 已被广泛应 用 5] 。 于地 铁 、 铁 路、 公 路、 市 政 及 水 电 等 隧 道 工 程[
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
土压平衡盾构机主减速器三级行星齿轮系统动力学土压平衡盾构机(Shield Tunnelling Machine, STM)是盾构法掘进施工中的关键装备,其刀盘驱动系统在掘进施工中起着驱动刀盘切割岩土的作用,它包括液压马达、主减速器、小齿轮/大齿圈减速单元。
主减速器是盾构机刀盘驱动系统的核心部件,采用三级行星齿轮传动,结构复杂且功率密度高,动力学特性较为复杂。
该主减速器多级行星齿轮的耦合振动会加速其疲劳失效,其动态性能对系统可靠性及整机运行稳定性有较大影响。
基于动力学理论研究主减速器振动特性,并通过型式试验分析评价其动态性能,是开展盾构机整机试验及产品批量投产前的重要工作。
本课题结合国家863计划资助项目(2007AA041802)——“土压平衡盾构大功率减速器”的研究任务,并考虑到盾构机的实际工况要求和项目指南所规定的具体指标,针对土压平衡盾构机三级行星减速器的动力学问题开展了较全面深入的研究。
主要研究内容包括以下方面:①盾构机主减速器三级行星齿轮传动系统动力学基于齿轮啮合理论和Lagrange方程,运用集中参数法建立了多级行星齿轮系统的扭转动力学模型,计算了三级行星齿轮传动系统的固有特性。
采用梯形波表示啮合刚度的时变特征,分析行星齿轮啮合过程中的相位关系,计算了三级行星齿轮不同啮合位置的扭转振动结构频率。
针对齿轮啮合误差特点,采用轴频和齿频叠加的谐波函数表示行星齿轮传递误差,考虑受啮合相位关系影响的行星齿轮系统时变刚度,系统地分析了多级行星齿轮传动的内部激励特征。
基于某施工标段盾构机的统计负载,考虑系统的内外部激励,求解了三级行星齿轮系统的动态响应,并对齿轮振动频谱特性进行了分析。
通过计算减速器不
同转速下系统构件的动态响应,研究了齿轮振动与盾构机减速器输入转速的关系,为盾构机驱动系统运行工况的选择提供了依据。
②主减速器多级行星齿轮——箱体耦合动力学研究考虑各级齿圈的扭转支
撑刚度,采用集中参数法建立了多级行星齿轮—箱体的耦合扭转动力学模型。
运用有限元方法获取了各齿圈的扭转支撑刚度,并在分析行星齿轮啮合相位和主要内部激励特征的基础上,求解了系统动态响应,分析了各级齿圈振动的时频特性
和齿轮传动系统——箱体的耦合振动机理。
③盾构机主减速器齿轮传动系统变载工况下的动态响应建立了土压平衡盾
构机的刀盘力学模型,分析了掘进时的刀盘载荷特性。
利用盾构机监控系统采集的掘进过程中刀盘承受的扭矩数据,得到主减速器的外部载荷。
依据载荷数据的变化规律,运用随机插值和数据拟合得到主减速器的连续载荷谱。
求解了盾构机刀盘驱动主减速器三级行星齿轮传动系统在变载荷工况下的动态响应,分析了其振动特征,并研究了主减速器传动系统振动响应与盾构机刀
盘转速之间的关系。
④主减速器箱体模态分析与实验建立了主减速器箱体的有限元模型,计算了其特征值问题,获取了箱体的低阶固有频率及相应振型。
开展了主减速器箱体的模态实验,运用最小二乘复频域法分析了模态数据,得到了箱体的固有特性,并通过模态置信判据验证了实验模态参数。
通过对比理论分析结果和实验数据,验证了模态参数识别的可靠性和有效性。
根据模态分析结果确定了箱体的薄弱环节,为结构优化提供了依据。
⑤盾构机主减速器动态性能测试与分析根据实验模态分析方法,进行了主减速器的模态实验,获取了系统的频响函数及模态频率。
依据盾构机三级行星减速
器大传动比的工作特性,采用背靠背能量回馈的试验台架,设计了动态性能测试方案。
测量了多种工况载荷下主减速器的振动加速度,分析了其振动特性,计算了主减速器的1/3倍频程结构噪声。
采用数值积分法计算了主减速器的振动速度和振动烈度,对主减速器的动态性能进行综合评价。
对比分析了各级齿圈的振动计算结果和测试数据,验证了所建立的多级行星齿轮—箱体耦合扭转动力学模型的正确有效性。
在采用隔声罩降低背景噪声的条件下,运用声压法进行了主减速器的噪声测试和声压级确定,同时采用声强法对主减速器台架运行的噪声强度分布进行了测量。