基于VC的智能回转支承现场监控软件开发学士学位论文
【】毕业设计 毕业论文:回转支承端面加工翻转装置设计
摘要回转支承在现实工业中应用很广泛,回转支承套圈端面在加工过程中需要进行翻转,由于工件惯性大在翻转过程中会产生大的冲击,因此存在很大的安全隐患,所以需要设计翻转装置以实现工件的平稳翻转。
根据工件结构特点设计专用翻转设备将会操作者带来了很大的方便,会大幅度地提高生产效率,同时也能确保生产安全。
本课题拟针对风力发电、军工雷达、医疗机械等相关行业对回转支承加工精度要求高的特点,根据马鞍山方圆回转支承股份有限公司现有加工条件,开展回转支承端面加工翻转装置的设计工作。
本文介绍了翻转装置的方案选择、翻转装置中的夹紧液压缸的设计、缸筒和活塞杆的校核、机架的校核、翻转液压缸的设计、翻转过程中用到的液压回路的设计等以及简单介绍三维软件Solidworks2011,并利用Solidworks2011建立各个模型,并进行了装配和虚拟样机仿真。
仿真结构表明设计的翻转装置满足工作要求。
关键词:回转支承翻转装置液压回路三维建模运动仿真AbstractSlewing ring in the real industry a wide range of slewing ring ferrule end face in the process need to flip the work piece inertia will have a big impact in the reversal process, there is a big security risk, so the need to design flip the device in order to achieve a smooth flip of the work piece. Work piece structural features flip device will be the operator has brought great convenience, which will greatly improve production efficiency, but also to ensure production safety.The topic is intend for the wind power generation ,military radar ,medical equipment and other related industries require high processing precision slewing ring ,slewing bearing end processing flip device according to the existing processing conditions of the Ma An Shan radius of the Slewing Ring Co, Ltd ,to carry out design work .The main contents include clamping hydraulic cylinder design, the overall design of the device of the flip, flip device cylinder and the piston rod of the check, the checking of the rack, flip the design of the hydraulic cylinder, flip is used in the hydraulic circuit design, and use Solidworks2011 flip three-dimensional model of the device parts, and assembly and virtual prototype simulation, simulation results show that the design of the flip device to meet the job requirements.Key words: Slewing ring Flip device Hydraulic circuitThree-dimensional modeling Motion Simulation目录摘要 (I)Abstract (II)目录 (I)1 绪论 (1)1.1 课题研究的背景目的意义 (1)1.2 翻转装置的介绍 (1)1.3 研究内容 (7)1.4 研究方案 (7)2 翻转装置的总体设计 (9)2.1 翻转装置的总体方案 (9)2.2 回转支承相关介绍 (9)回转支承的尺寸确定 (10)回转支承的端面加工工艺 (10)2.3 转盘和卡爪的设计 (11)卡爪的具体设计 (11)转盘的具体设计 (11)2.4 夹紧缸的设计 (12)2.5 机架的设计 (19)2.6 翻转缸的设计 (24)2.7 本章小结 (25)3 翻转装置的液压系统 (27)3.1 液压系统的分类 (27)按循环方式分类 (27)按供油方式分类 (27)按泵的数量分类 (27)3.2 液压控制回路的分类 (27)3.3 夹紧缸的回路设计 (28)3.4 翻转缸的回路设计 (28)3.5 本章小结 (29)4 翻转装置建模与仿真 (30)4.1 Solidworks2011三维建模软件介绍 (30)4.2 翻转装置主要零件的建模 (30)机架的建模 (30)翻转缸的建模 (33)转盘的建模 (34)夹紧缸的建模 (35)卡爪的建模 (36)4.3 翻转装置的装配和仿真 (37)装配方法 (37)虚拟样机仿真 (39)4.4 本章小结 (42)结论与展望 (43)致谢 (44)主要参考文献 (45)1 绪论1.1 课题研究的背景目的意义本课题拟针对风力发电、军工雷达、医疗机械等相关行业对回转支承加工精度要求高的特点,根据马鞍山方圆回转支承股份有限公司现有加工条件,开展回转支承端面加工翻转装置设计工作。
一种基于Visual Basic的瓦斯监控系统
.
.
.
.
.
经数据融合技术把多传感器在 空间或时 间上 可冗余 或互补 的信 息, 依据某种准则进行组合 ,得 出初步结果 。经 过初 级处理过 的数据送 入下位机 ,下位机通过无线通信模块保持与 上位机 的通信 。得到的 数据再进一步送入工控机进行处理。
_
Wi t h M y C o n u  ̄
测试规 范。它 内置 了M C 7 5无线模块 ,采用简单的A T 命令交互界面 和提供 了更方便 的电源接 口,具有 良好 的电磁 屏蔽罩 和金属外壳, 坚 固耐用 :抗强 电磁干扰, 高温散热能力极强 。 2 . 3工控机 工控机采 用研 华公司生产的I P C 一 6 1 0 H 。该机是专 为任务关键应
【 关键词 】 煤矿 瓦斯监控 ; V i s u a l B a s i c ;瓦斯传感 器;工控机
引 言
近年 来瓦斯爆炸的安全事故频发 ,严重威胁 了生产 的安全 ,给 国家和人 民造成 了重大损失。其中 ,一个很重要 的原 因就是瓦斯监 控设备不 能很好地发挥作用 。传统的瓦斯监控设备,监控范 围有 限, 并且基本采 用有 线模式传输信号,在矿井 中使用十分不便 。而无线 监测监控 系统通 过布置在监测区域 内大量的廉价微型传感器节 点, 通过无 线通 信方 式组成的一个多跳的 自组织 网络 ,其 目的是采集和 处理 网络覆 盖区域中被感知对象的信息 ,并通过无线模块 发送给观 察者 。无线监测监控系统集数据的采 集、融合 、分析 、传输 于一体 , 具有 展开快速、可靠稳定、可维护性好等特 点,特别适用 于环 境恶 劣、不方便人工监控和通过有线网络监控 的一些场所 ,正 好可 以弥 补有 线网络的相关缺点 。将其应用于煤矿 中,配合上层监控软件 , 可以很好地实现对煤矿 内重点 区域瓦斯浓度 的实时监控 、显示 和预 警,对煤 矿的安全生产 起着非 常重要 的作用 针对无线监测监控系统 的以上特 点和优势 ,文 章提 出了一种基 于V i s u a l B a s i c 的煤矿瓦斯浓度监测监控 系统 。V i s u a l B a s i c( 简 称V B)是美国微软公司推 出的强有力 的系列开发工具之一 ,是一种 可视化的、面向对象和采用事件驱动方式 的结构化 高级程 序设 计语 言,以其实用、方便、快捷等 优点而 深受广 大程序 员的青 睐。 1 系统组成与工作原理 本系统主要 由工控机、上位机 、下位机 以及无线通讯网络组成。 系统总体框图如图1 所示 系统工作原理 : 将瓦斯 传感器 放在瓦斯待 检测点进 行测量 , 传感器将采集到的信 号转化 为可识别的电压信号,
安徽工业大学科技成果——回转支承计算机辅助工艺设计CAPP软件
安徽工业大学科技成果——回转支承计算机辅助工
艺设计CAPP软件
成果简介
国内回转支承企业经过多年的发展,企业一般都具有相对稳定的产品种类,其基型产品的工艺过程也相对不变,变化较多的则是同一品种的系列变化。
工艺人员日常工艺设计的主要形式是基于基型产品的修改型设计。
在这种方式下,工艺规程的编制和工艺信息管理就成为最主要和劳动量最大的工作。
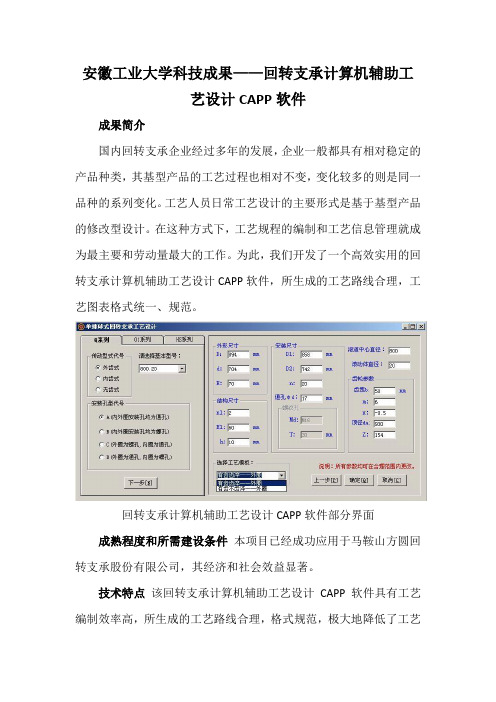
为此,我们开发了一个高效实用的回转支承计算机辅助工艺设计CAPP软件,所生成的工艺路线合理,工艺图表格式统一、规范。
回转支承计算机辅助工艺设计CAPP软件部分界面成熟程度和所需建设条件本项目已经成功应用于马鞍山方圆回转支承股份有限公司,其经济和社会效益显著。
技术特点该回转支承计算机辅助工艺设计CAPP软件具有工艺编制效率高,所生成的工艺路线合理,格式规范,极大地降低了工艺
设计人员的劳动强度,具有很好的经济效益。
市场分析和应用前景
适用于机械产品零件的工艺设计,市场应用前景广阔。
社会经济效益分析该套软件可以大大降低工艺设计人员的劳动强度,提高工艺设计质量和效率,其经济和社会效益显著。
知识产权及成果获奖情况
该成果获2010年马鞍山市科技进步三等奖。
合作方式合作开发、受托开发。
回转支承研发生产方案(二)

回转支承研发生产方案一、实施背景随着中国制造业的持续发展,产业结构逐渐向高端、智能、绿色方向转型。
回转支承作为机械设备的关键部件,其性能与质量对整个设备的运行至关重要。
然而,当前国内的回转支承产品在精度、耐用性、抗疲劳性等方面与国际先进水平仍存在差距。
为此,开展回转支承的研发生产,是推动我国机械制造产业升级,实现产业结构改革的重要途径。
二、工作原理回转支承是一种能够承受综合载荷的大型轴承,能同时承受较大的轴向力、径向力和倾翻力矩。
其工作原理主要是利用滚动摩擦代替传统滑动摩擦,具有摩擦阻力小、运行平稳、承载能力大、使用寿命长等特点。
三、实施计划步骤1.研发团队建设:组建由材料科学、机械设计、电气工程等多学科背景的专业研发团队。
2.市场调研与需求分析:收集国内外回转支承市场需求,分析产品性能要求与技术标准。
3.材料选择与试验:选用具有高强度、耐磨性、耐腐蚀性的材料,进行对比试验,确定最优材料组合。
4.设计与仿真:根据市场需求和技术标准,进行回转支承的优化设计,并通过有限元仿真验证设计的有效性。
5.样品试制与测试:制作回转支承样品,进行各项性能测试,对比分析测试数据,优化产品设计。
6.小批量生产与验证:进行小批量生产,在实际工况下对产品进行验证,收集反馈信息,持续改进。
7.大批量生产与市场推广:根据小批量生产验证的结果,调整生产工艺,进行大批量生产,同时开展市场推广工作。
四、适用范围此研发生产方案适用于各类机械设备的回转支承需求,特别是在重型机械、数控机床、风电设备、石油化工等高负载、高精度、长寿命要求的领域。
五、创新要点1.材料创新:采用高强度、耐磨性、耐腐蚀性材料,以提高产品的承载能力和使用寿命。
2.设计创新:引入现代设计理念和方法,如有限元分析、优化设计等,提高产品的精度和稳定性。
3.工艺创新:应用先进的制造工艺和技术,如精密铸造、数控加工、表面处理等,提高生产效率和产品质量。
4.智能化:结合传感器和控制系统,实现回转支承的智能化控制和监测,提高设备的运行效率和安全性。
基于单片机的摄像机云台控制系统软硬件设计与实现(本科生毕业论文)
摘要本论文在分析了摄像机云台结构、步进电机工作原理以及云台系统控制要求的基础上,设计了以STC89C52单片机为控制器的摄像机云台控制系统,以ULN2003为步进电机驱动芯片,利用独立按键控制云台转动,同时编写上位机程序并通过串口通信实现与PC机之间的串口通信。
该控制系统由单片机控制模块、键盘模块、电机驱动模块、远程PC机控制模块组成。
单片机控制模块的工作包括处理键盘输入、响应PC串口中断、控制电机运行;键盘模块采用独立式键盘控制信息的输入;电机驱动模块采用ULN2003驱动电路控制摄像机云台的运动;远程PC机控制模块实现微机远程控制单片机,进而控制步进电机。
云台的运行有自动运行和手动运行模式,同时受上位机控制。
键盘或PC输入信息,单片机接收后对输入信息进行处理,然后发出控制信号送ULN2003A,ULN2003A驱动步进电机运转。
利用独立按键可以实现云台手动控制,利用计算机远程控制云台转动,增强了云台控制系统的实用性;同时利用VC6.0编写上位机,利用Keil4编译和调试,利用Proteus进行系统仿真,使系统更加完善。
关键字: 单片机;云台;键盘;步进电机;串口通信AbstractThis thesis analyzes the structure of camera pan and tilt, stepper motor system works and PTZ control requirements based on the design of the controller to STC89C52 microcontroller camera pan and tilt control system to ULN2003 stepper motor driver chip for the use of separate buttons control the PTZ rotation, as well as prepare the PC program and through the serial communication with the PC serial communication between.The control system consists of single-chip control module, keyboard module, motor drive module, the remote PC control module. MCU control module include handling keyboard input, respond to PC serial port interrupt, control the motor running; Keyboard control modules using stand-alone keyboard input of information; motor drive module using ULN2003 driver circuit control camera pan and tilt movement; remote PC control module microcomputer remote control microcontroller, then control the stepper motor.PTZ operation with automatic operation and manual operation mode,as well as by PC control. Keyboard or PC input information, the microcontroller after receiving the input information processing, and then send control signals to send ULN2003A, ULN2003A drive stepper motor running. Separate buttons can be achieved using the PTZ manual control, the use of computer remote control PTZ, PTZ control system enhances the practicality; while using VC6.0 prepared by the host computer, use Keil4 compile and debug the system using the Proteus simulation, so system more perfect.Keyword: STC89C52;Camera Pan;Keyboard;Stepper Motor;Serial Communication目录摘要 (I)Abstract (II)目录 .............................................................................................................................. I II 第一章绪论 . (1)一、云台 (1)二、步进电机 (2)(一)步进电机的工作原理 (2)(二)步进电机主要技术指标 (3)三、单片机 (4)(一)STC89C52 (5)(二)STC89C52各个引脚的功能 (6)(三)STC89C52串口通信 (8)(四)STC89C52中断系统 (9)四、本设计完成的任务 (10)第二章总体方案 (11)一、云台控制系统简析 (11)二、控制系统实现 (11)第三章软件基础 (13)一、 C 语言简介 (13)二、Keil 编译器 (13)(一)Keil 8051 C编译器简介 (13)(二)如何使用Keil软件开发 (14)三、Proteus 仿真软件 (17)四、MSComm 控件 (21)(一)基于VC的MSComm控件串口编程基本步骤 (22)(二)MSComm控件属性 (22)五、Visual C++ 软件 (23)第四章系统设计 (26)一、系统流程 (26)二、单片机系统 (28)(一)复位电路 (28)(二)时钟电路 (28)三、ULN2003A驱动电路 (29)四、键盘模块 (30)五、初始化模块 (31)六、串口中断模块 (31)第五章系统仿真 (32)一、虚拟串口 (32)二、Keil 编译器 (32)三、Proteus 仿真软件 (32)第六章结论 (35)致谢 (36)参考文献 (37)附录一单片机程序源代码 .............................................................. 错误!未定义书签。
基于VC33主动磁轴承控制系统的设计
基于VC33主动磁轴承控制系统的设计1尹国华,徐龙祥南京航空航天大学机械设计及理论系,南京(210016)E-mail:yinguohua@摘要:基于美国TI公司推出的浮点DSP芯片TMS320VC33设计了磁悬浮轴承系统的数字控制器,并运用可编程逻辑器件(CPLD)实现了DSP对A/D和D/A的逻辑操作。
采用嵌入式C语言和汇编语言混合编写了磁悬浮轴承数字控制器的PID控制算法。
成功实现了五自由度磁悬浮轴承系统的稳定悬浮。
静态悬浮试验结果表明设计的磁悬浮轴承系统控制器稳定性好、可靠性好、其控制精度达到了预期的效果。
为进一步实现先进的控制算法提供了硬件平台。
关键词:磁悬浮轴承;TMS320VC33;PID控制;稳定悬浮中图分类号:TP332.31.引言磁悬浮轴承是一种利用电磁场力将转子悬浮于空间,不需要任何介质而实现承载的非接触式支承装置,与传统的滚动轴承和滑动轴承相比,磁悬浮轴承明显的特点在于没有机械接触,而且其支承力可控[1]。
由此而具有传统轴承无法比拟的优越性能:由于没有机械摩擦和磨损,所以降低了工作能耗和噪声,延长了使用寿命[2];动力损失小,便于应用在高速运转场合;由于不需要润滑和密封系统,排除了污染,可应用于真空超净,腐蚀性介质以及极端温度和压力等特殊工作环境[3]。
TMS320C3X是TI推出的第三代产品,也是第一代浮点DSP芯片。
TMS320VC33是最新的一款32位高性能数字信号处理器。
指令周期分13ns和17ns两种,单周期完成32位整数、40位浮点乘法运算,DSP工作在75MHz主频时,其浮点运算能力可达150MFLOPS(Million Floating-Point Operations Per Second[6]。
TMS320信号处理器家族具有特别适合信号处理的硬件结构和指令系统, 而该信号处理器家族的高性能浮点处理器系列TMS320C3X又增加了许多浮点处理功能,因此在信号处理的各个应用领域都得到了广泛应用。
旋转机械故障诊断远程实验平台
旋转机械故障诊断远程实验平台摘要旋转机械作为最常见的机械设备,是工业连续化生产的核心部分。
当旋转机械出现故障,轻则造成设备损坏、经济损失,重则造成人身伤害甚至伤亡出现。
因此旋转机械稳定可靠运行尤为重要,必须时刻了解设备实时运行状况。
当设备运行过程中出现异常时需及时分析原因,进行故障诊断。
通过运用网络通讯技术、数据库技术、技术和人工智能技术,开发出基于B/S模式的旋转机械故障诊断实验平台,同时研究旋转机械不同故障类型的分类方法。
研究内容主要分为数据传输的实现、诊断方法的探索以及网络平台的搭建三个部分。
数据传输功能的实现方案主要为,使用Visual Studio软件对采集软件进行二次开发,以获取实验数据,同时将实验数据实时存入数据库中。
设置现场服务器数据库与远程服务器数据库,将其进行连接,实现远程获取实验数据的功能,以便进行远程数据处理及网页调用显示等操作。
对于旋转机械多种故障类型,挑选了平行不对中、角度不对中、碰摩等典型故障类型进行诊断方法的探索。
通过对采集的不同故障类型的数据信号进行时频域分析后,确定最终的故障类型分类识别算法。
网络平台主要的功能模块有,旋转机械运行状态监测模块、旋转机械I故障类型识别和诊断模块、故障诊断相关知识模块、设备资料介绍模块、历史数据查询模块以及相关文献资料查询和下载模块。
其中,旋转机械运行状态监测模块以及旋转机械故障类型识别和诊断模块为主要开发模块,分别实现了旋转机械运行状态实时监测功能以及故障类型的识别与诊断功能。
最后,针对开发出来的网络平台进行测试与现场应用。
测试结果表明,本实验平台能够有效地对现场实验台旋转机械设备进行工况监测与故障诊断,具有良好的普适性和可操作性。
关键词:旋转机械,故障诊断,互联网,状态监测,神经网络IIROTATING MACHINERY FAULT DIAGNOSISREMOTE EXPERIMENT PLATFORMABSTRACTAs the most common mechanical equipment,rotating machinery is considered as the core part of industrial continuous production.Equipment damage and economic loss will be caused when the rotating machinery fails, even personal injury or casualties.Therefore,stable and reliable operation of rotating machinery is particularly important.It is necessary to understand the operational status of equipment in real time.When an abnormality occurs during the operation of the equipment,it is necessary to analyze the fault in time.A rotating mechanical fault diagnosis platform based on B/S mode is developed by using network communication technology,database technology, technology and artificial intelligence technology.And the classification methods of different fault types of rotating machinery are studied. The research content is mainly divided into three parts:the realization of data transmission,the exploration of diagnostic methods and the construction of network platform.Secondary development of the data acquisition software is carried out by Visual Studio software to implement data transfer capabilities.The functions of obtaining the experimental data from remote database,processing remote data and displaying on the web page are realized after setting up and connecting the remote and field databases.For the various types of faults in rotating machinery,typical fault types as parallel misalignment,angle misalignment and rubbing are selected to explore diagnostic methods.By using MATLAB to analyze the current,voltage,speed,IIIvibration displacement and other signals of different fault types,the fault type classification algorithms are determined.The main functional modules of the network platform include a rotating machinery running condition monitoring module,a rotating machinery fault type identification and diagnosis module,a fault diagnosis related knowledge module, a device data introduction module,a historical data query module,and a related literature data query and download module.The rotating machinery running condition monitoring module and the rotating machinery fault type identification and diagnosis module are the main development modules,which realize the real-time monitoring function of the rotating machinery running state and the identification and diagnosis function of the fault type.Finally,the network platform is tested and put in to application.The result shows that the platform can effectively monitor and diagnose the field rotating mechanical equipment.The research process and methods have good universality and operability.KEY WORDS:Rotating machinery,Fault diagnosis,Internet,Condition monitoring,Neural networkIV目录第一章绪论 (1)1.1引言 (1)1.2研究目的和意义 (1)1.3国内外研究动态 (2)1.3.1旋转机械故障诊断技术 (2)1.3.2旋转机械远程监测和故障诊断网络平台技术 (5)1.3.3相关问题讨论 (7)1.4主要研究内容 (8)1.5技术路线图 (9)1.6小结 (9)第二章旋转机械故障诊断方法 (11)2.1引言 (11)2.2旋转机械设备常见故障 (11)2.2.1转子不对中故障 (11)2.2.2转子碰摩故障 (12)2.3旋转机械故障模拟实验设计 (12)2.3.1旋转机械故障模拟实验台 (13)2.3.2旋转机械故障模拟实验目的 (13)2.3.3旋转机械故障模拟实验内容 (14)2.3.4旋转机械故障模拟实验注意事项 (15)2.3.5旋转机械故障模拟实验结果分析 (16)2.4数据预处理 (16)2.4.1陷波滤波处理 (16)2.4.2小波包能量法特征提取 (19)2.4.3数据归一化 (20)2.5故障类型分类识别方法 (21)2.5.1决策树 (21)2.5.2BP神经网络 (23)2.5.3RBF神经网络 (26)2.6小结 (28)第三章故障诊断远程实验平台总体设计 (30)3.1引言 (30)3.2远程实验平台设计目标与原则 (30)3.2.1平台设计目标 (30)3.2.2平台设计原则 (30)3.3远程实验平台开发环境选择 (31)3.3.1开发技术 (31)3.3.2开发平台 (32)3.3.3开发工具 (32)3.3.4开发语言 (33)3.4远程实验平台服务原理 (33)3.5远程实验平台体系结构设计 (36)3.6远程实验平台功能模块设计 (36)3.7主要工作任务及难点问题 (37)3.8小结 (39)第四章故障诊断远程实验平台开发 (40)4.1引言 (40)4.2远程实时获取数据方法 (40)4.2.1远程实时获取数据方案设计 (40)4.2.2远程实时获取数据的接口配置 (41)4.2.3远程实时获取数据的软件设计 (42)4.2.4远程实时获取数据的数据库配置 (46)4.3远程实验平台功能模块实现 (47)4.3.1设备监测模块 (47)4.3.2设备诊断模块 (49)4.3.3数据查询模块 (51)4.3.4设备资料模块 (52)4.3.5诊断知识模块 (52)4.3.6相关文献模块 (52)4.4远程实验平台界面开发 (52)4.4.1平台主页面设计 (53)4.4.2平台登录与注册界面设计与开发 (54)4.4.3平台状态监测界面设计与开发 (55)4.4.4平台故障诊断界面设计与开发 (56)4.4.5平台其他功能模块界面设计与开发 (57)4.5小结 (58)第五章故障诊断远程实验平台测试与应用 (60)5.1引言 (60)5.2故障诊断远程实验平台测试方案 (60)5.2.1测试原则 (60)5.2.2测试内容 (61)5.2.3测试方法 (62)5.2.4测试用例 (63)5.3故障诊断远程实验平台测试 (69)5.4故障诊断远程实验平台测试结果分析 (70)5.5故障诊断远程实验平台应用 (70)5.6小结 (82)第六章结论与展望 (84)6.1工作总结 (84)6.2主要结论 (85)6.3进一步工作展望 (85)参考文献 (88)致谢 (94)攻读硕士学位期间发表的学术论文 (96)第一章绪论1.1引言如今,机械设备的组成大多都离不开旋转机械,旋转机械通过其内部的转子以及其他回转件实现设备的旋转运动,诸如汽轮机、发电机、鼓风机等都是旋转机械,这些设备是企业的核心装备,若发生事故必将对企业造成极大影响。
基于VC++和OpenGL的自行车机器人实时监控系统的设计和实现的开题报告
基于VC++和OpenGL的自行车机器人实时监控系统的设计和实现的开题报告一、选题背景与研究意义近年来,随着机器人技术的不断发展,各种人形机器人、无人机、自动驾驶汽车等机器人产品逐渐进入我们的生活。
其中,自行车机器人是一种有趣且实用的机器人形态,它能够模拟人类骑自行车的动作,具有运动、娱乐、健身等多种功能。
随着自行车机器人的不断普及,越来越多的人需要一种实时监控系统来跟踪自行车机器人的运行状态、保证运动安全。
为此,本项目选用VC++和OpenGL作为开发平台,设计并实现了一套自行车机器人实时监控系统,为用户提供了一种直观、实用的机器人监控手段,有重要的研究价值和应用意义。
二、研究内容和目标本项目主要研究内容和目标如下:1. 基于VC++语言开发自行车机器人实时监控系统,提供屏幕捕获、图像处理、控制指令等功能。
2. 设计并实现一套自行车机器人三维模型,并使用OpenGL技术实现实时渲染。
3. 利用传感器采集自行车机器人的姿态数据,对其运动状态进行实时监测和跟踪。
4. 提供实时数据可视化功能,增强用户交互性和使用体验。
三、研究方法和技术路线本研究项目采用的研究方法和技术路线主要包括:1. 采用OpenGL技术实现三维模型的渲染,构建模拟自行车运动的场景。
2. 利用传感器采集自行车机器人的姿态数据,进行实时监测和数据处理。
3. 采用VC++语言开发自行车机器人实时监控系统,提供屏幕捕获、图像处理、控制指令等实用功能。
4. 开发数据可视化工具,将实时监测的数据以直观方式展示给用户。
四、预期成果本项目预期的最终成果包括:1. 一套基于VC++和OpenGL的自行车机器人实时监控系统,能够方便地对机器人运动状态进行监测和跟踪。
2. 自行车机器人三维模型,具有良好的观感效果和动态模拟效果,能够进行多角度观察和交互操作。
3. 实时数据采集和可视化工具,方便用户对机器人的各项数据进行监测和分析。
五、存在的问题和解决方案本项目存在的主要问题和解决方案如下:1. 自行车机器人模型的制作与渲染。
毕业设计-基于VC的云台镜头控制操作台软件设计
基于VC的云台镜头控制操作台软件设计摘要随着多媒体技术和网络通信技术的迅速发展,数字视频监控技术在多种领域得到越来越广泛的应用。
而在在数字视频监控系统的设计与实现中,对云台的方位控制是系统执行的重要任务之一.云台是一种用于监控时调整摄像头位置的设备,云台镜头的控制是整个闭路监视系统一个重要组成部分。
本文设计了一种基于VC的云台镜头控制操作台软件,用以监控设备中能对云台起控制作用的软件。
该控制软件能控制云台的垂直运动和水平运动,以及摄像机的聚焦/散焦,变倍近/远、光圈变大/小等。
论文首先介绍了课题的应用概况,分析了监控系统和云台软件的功能概况,并针对这些功能提出了设计的实现方案,对云台中的通讯协议PELCO-D协议做了详细介绍。
其次论文详细介绍了本设计软件开发的全过程,给出了主程序、数据发送程序、运动控制程序和雨刷镜头控制程序的软件流程图。
通过调试,起到了很好的控制效果关键字:云台;监控系统;VC;操作台The PTZ camera control based on VCconsole software designAbstractWith the multimedia technology and the rapid development of network communication technology, digital video surveillance technology in many fields more and more widely. In the digital video surveillance system design and implementation, on the head of the orientation control is the system to perform important tasks. PTZ is a camera for monitoring, adjust the location of equipment, PTZ camera control is the closed-circuit surveillance system is an important part.This paper presents a PTZ camera control based on VC's console software for monitoring devices can head a controlling software. The control software can control the head of the vertical movement and horizontal movement, and the camera's focus / defocus, zoom Near / Far, aperture bigger / smaller, etc..Paper first introduces the topic of application profiles, analysis of the monitoring system and PTZ functions of the software profile, and these features make the design for the realization of the program, on the head of the communication protocol PELCO-D protocol introduced in detail. Second, this thesis details the entire process of designing software development, given the main program, the data send process, motion control programs and wipers lens control program flow chart. Through these tests played a good control effect.Key Words:Pan/tilt/zoom,;monitoring system;VC;Consoles目录摘要 (I)Abstract (II)1绪论 (1)1.1云控制应台用概况 (1)1.1.1数字监控系统概述 (1)1.1.2 监控系统的组成 (1)1.2云台控制软件的发展概况 (2)1.2.1 云台控制软件简介 (2)1.2.2 云台控制软件的原理 (2)1.2.3 云台控制软件的发展现状 (2)1.3工作内容和章节安排 (3)2软件分析和方案设计 (4)2.1软件功能分析 (4)2.2软件设计方案 (5)2.2.1 设置模块 (5)2.2.2 按钮模块 (6)2.2.3通讯模块 (7)3串行通信的实现 (8)3.1串行通信概述 (8)3.2串行通信介绍 (8)3.2.1 串行传送方式 (8)3.2.2 串行通信方式 (9)3.2.3 通信协议介绍 (10)3.2.4 RS-485标准 (12)3.3 PELCO-D协议 (13)3.3.1 PELCO协议应用 (13)3.3.2 PELCO-D协议内容 (13)4软件设计及实现 (16)4.1控制系统软件概述 (16)4.2开发工具和软件编制环境简介 (17)4.3软件程序流程图 (18)4.3.1 主程序软件设计 (18)4.3.2 运动控制流程 (19)4.3.3 雨刷控制流程 (20)4.3.4 数据发送程序 (20)4.4软件程序 (21)4.4.1 程序功能 (21)4.4.2 界面展现 (22)4.4.3 变量/函数声明 (23)4.4.4 初始化操作 (23)4.4.5 按钮功能实现 (24)4.4.6 数据发送 (24)5毕业设计总结 (25)5.1论文总结 (25)5.2设计中的经验总结 (25)5.3个人经验总结 (26)6致谢 (26)7参考文献 (27)8附录 (29)9外文资料翻译及原文 (36)1绪论1.1云控制应台用概况1.1.1数字监控系统概述数字监控系统是指通过软硬件将监控头采集到的图像处理成数字信号,传送到电脑进行处理。
基于LabVIEW的回转支承测试系统设计
轴向加速 度传感器
銮Ⅱ噩鬓鍪堑三二#三3垦酬窝翥薹塞篙墓霎
·-———46·--——
图3传感器安装布置
万方数据
图4软件设计流程图 3.2 软件设计主要内容
软件设计内容主要包括两大部分:数据采集和
i苇加卷20∞年3月譬:三墨4 l程
数据分析处理。其中数据采集部分主要具备数据采
集功能,同时具有简单的数据分析功能;数据分析处
用于回转支承进一步的寿命预测。
_
小波消噪包括三个步骤,即对含有强噪声的振
_
动信号进行 N 层小波分解,对每一层的高频系数选
_
择一个阀值进行软阀值量化处理,最后用分解的低要圉
频系数对信号进行重构。在LabVIEW中利用脚本节
圈
点Matlab Script N0de来调用MATLAB语言编写的
躺
小波消噪程序,对回转支承的高噪声振动信号进行鬟鬻
本文链接:/Periodical_gcjx200903013.aspx 授权使用:guxiaomin(njgydx),授权号:e893046f-5d00-4610-9145-9e9e01422687
下载时间:2011年3月6日
6”缈《”《俐”驴嘲帮≈¥#,”铃%嘶《%≯W
~踟哟疗and c蹴岫翻一磁础一‰蕊。二,
进行处理后,噪声基本被消除。
4 结论 本文采用振动检测方法构建的回转支承寿命试
验测试系统,增强了系统功能,操作界面友好,数据 分析及处理结果直观,具有一定的工程应用价值,为 回转支承寿命试验的故障诊断和寿命预测提供了试 验基础。
工控机:选用台湾研华IPC610L工控机,用于 软件的运行平台。
测试系统中以信号调理器、数据采集卡和工控 机为系统硬件,以LabVIEW为软件开发平台,实现
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业论文(设计)智能回转支承现场监控软件的开发院系:机械与动力工程学院姓名:学号:专业:机械工程及自动化指导教师:王华摘要目前,国内大中小型企业为提高产量和生产效率,增强企业运行安全系数,普遍开始利用计算机进行工业自动化生产的技术改造。
通过微机对现场的生产情况进行监视控制,可以达到减轻工作量,提高劳动生产率和安全可靠性的目的,这已经成为企业界管理人员和自动化领域技术人员的共识[]1。
现在为方便地开发适用的工业监控软件,国内外诸多公司已经开始研发工业组态软件,诸如美国的Intouch,台湾研华的Genie,北京恒力的Good-Helper。
这些组态软件缩短了工业监控系统软件的开发周期,也相应提高了其可靠性。
然而,这些组态软件本身价格昂贵,对于小型企业的单机系统来说,又有许多功能用不上,造成浪费。
同时组态软件的本身也还存在不足之处,不能满足一些特殊要求[]2。
因此,目前仍然需要技术人员掌握基本的开发方法,量体裁衣地为企业开发出小型经济适用的软件。
随着Windows系统的普遍使用,许多计算机控制系统上位机普遍采用Windows编程。
而面向Microsoft Windows系统的语言程序为用户设计一个优美的图像界面提供了方便,为控制系统建立高度友好的用户界面奠定了基础。
Visual C++(VC)是Windows编程的强有力的开发工具,提供了现成的窗口、控制与工具条的制作手段,大大简化了界面的开发过程,并且开发出的界面具有组态软件风格,使用起来方便、灵活、简单易学[]3。
关键字:监控软件组态软件 VC++AbstractAt present, in order to improve yield and production efficiency, and enhance the safety factor of running a company, the domestic small and medium-sized enterprises began to carry out technological transformation of industrial automation production by using computer technologies. Monitoring and control of the production on the site by using computers, it has reduced workload, and has improved labor productivity and safety reliability, and it has become a consensus between management personnel of enterprises and the automation technical staff.Nowadays, to develop the appropriate industrial monitoring software, many domestic and foreign companies have started to develop industrial configuration software, such as Intouch in the United States, Genie of Advantech in Taiwan, Good-Helper of HengLi in Beijing. The configuration software has shortened the development cycle of industrial monitoring system software, and improved its reliability correspondingly. However, the configuration software, for stand-alone system of small enterprises, is expensive, and has many useless functions, which caused waste. At the same time, the configuration software itself has drawbacks, and sometimes it can’t meet some special requirements.Therefore, presently some enterprises still need the technical staff to develop small economic applicable software by using the basic methods. With the widespread use of Windows system, many computer control system is programmed by widely using Windows. For Microsoft Windows system language programming, it provides convenience for users to design a beautiful image interface, and lays the foundation for the control system to establish highly friendly user interface. Visual C++ (VC) is a powerful development tool for Windows programming, and it can provide ready-made windows, convenient use of control and toolbar, so it greatly simplifies the development process of the interface. Also the interface has the style of the configuration software, making it easy to use and easy to learn.Key words: monitoring software, configuration software, VC++摘要 (1)ABSTRACT (2)第一章绪论 (4)1.1概述 (4)1.1.1智能回转支承 (4)1.1.2监控软件开发及基本要求 (6)1.2文章主要研究内容 (7)第二章监控软件功能简介 (8)2.1软件平台的选择 (8)2.2监控软件各部分功能 (9)2.2.1数据的实时采集和显示 (9)2.2.2历史趋势的显示 (12)2.2.3实时报警的实现 (12)2.2.4报表的打印 (13)第三章监控软件开发实现过程 (15)3.1工程的创建 (15)3.2资源的添加 (16)3.3函数代码的添加 (22)3.4显示效果图 (24)第四章总结 (25)致谢 (26)参考文献 (27)附录I (29)第一章绪论1.1概述1.1.1智能回转支承回转支承是实现两部分相对回转运动的基础零件,是各种大型起重运输等设备的重要部件,具有结构紧凑、运转平稳、结构动载小的优点。
近50年来,回转支承广泛应用于机器人、风力发电机、雷达、工程机械、载人升降机、轨道车辆、饮料灌装机械、污水处理装置以及医疗设备等领域。
由于回转支承造价昂贵,而且拆装困难,维修周期长,维修费用高,并且其使用环境相对恶劣,因此对回转支承的动静载性能和可靠性指标提出了较高的要求,往往回转支承寿命决定了其产品的寿命。
但由于回转支承结构受力复杂,运行状态特殊,目前国外一些大型生产厂家有自己的设计标准、质量检测体系和检测设备,但没有形成国际标准,各自为政。
国内由于引进回转支承较晚,生产的厂家很多,但集中在低端市场,往往是仿制国外产品,在产品的最终检验缺乏准确的检测数据,在市场上往往底气不足。
其次,由于回转支承出现的年代不是很长,国外公司的经验公式各不相同,我国企业在新产品开发时,需要验证这些公式的正确性,或是建立自己的设计经验公式,这就需要进行大量的实验。
因此建立一套相关的实验设备、进行大量的实验是有长远发展的企业的首选[]4[]5。
智能回转轴承是一种自身具备在线参数检测和状态监测能力的转盘轴承。
它在传统转盘轴承的基础上嵌入不同用途的传感器,使其与转盘轴承结合成为一体而形成独特的结构单元。
各种不同类型的传感器采集的数据通过总线的方式全部传递给现场监控器,进行快速傅里叶变换等各类初步信息处理,并对处理结果进行显示,以便现场工作人员及时对信息进行辨识[]6[]7。
图1.1大型回转支承南京工业大学机电一体化研究所一直从事数控机床的改造与开发,尤其在数控成型铣齿机床的研究方面成果显著。
在近几年中开发了数十台高速数控铣齿机床,大大提高了回转支承齿圈的加工效率。
企业生产出大型回转支承后,通常按照国标JB-2300-1999来检验产品质量,但没有很好的实验装置用来评估回转支承的寿命。
JB-2300-1999 是徐州回转支承厂参考德国罗特爱德公司的部分标准制定的,但该标准没有考虑回转支承应用场合的不同,使其不能满足现在产品的发展的要求。
为此,国内某大型工程机械公司委托研究所设计开发一套用于大型回转支承测试的实验平台,在模拟实际工况条件下,研究回转支承的各项力学性能并做寿命评估,为建立行业标准做好技术准备[]8。
回转支承的性能主要集中体现在以下几个方面:承载能力、灵活性和使用寿命。
本课题根据大型回转支承实际应用场合,在实验室中模拟各种工况条件,完成回转支承的载荷静刚度、无载荷启动力矩、有载荷启动力矩、回转支承齿根受力情况、回转支承寿命的检测实验。
研究各种状况下回转支承的力学性能,评估其寿命,为工程设计人员提供详细的实验数据,优化产品设计,提高回转支承的可靠性,延长其使用期限因此本实验台的建立对企业有重大的实用价值,在寿命评估方面具有重大理论意义[]9。
1.1.2监控软件开发及基本要求监控软件主要用于回转支承综合性能实验台上监测回转支承的受力状态,为实现回转支承的性能检测提供可靠的实验数据。
监控软件要实现的功能有参数设置、数据采集、保存、显示、打印、报表生成以及对故障分析模块的调用[]10[]11,如图1.2所示。